應用于無人機的新體系數據記錄系統設計
2019-01-10 05:16:20王偉偉
智能物聯技術 2018年2期
王偉偉,王 卿
(中國電子科技集團公司第五十二研究所,浙江 杭州310012)
0 引言
無人機(Unmanned Aerial Vehicle,UAV),是一種通過無線遙控或規劃航線飛行的無人駕駛飛行器,它一般由動力系統、飛行控制系統、無線通訊遙控系統、有效載荷等部分組成。無人機技術與全球定位系統技術、遙感技術、高分辨率攝影技術相結合,使其具備了快速反應、長航時工作、數據實時采集、作業效率高、適應復雜環境等特點,應用范圍變得越來越廣。在農業生產的林業監測、牧群定位、農情遙感等方面,在電力行業的電力巡檢、電網鋪設、線路勘測等方面,在地質行業的地圖測繪、地質勘探等方面,甚至在森林防護、抗災救災等方面,無人機都有著廣泛的應用。目前,無人機按不同用途及性能劃分已達數百種之多。時間跨度上,無人機留空從一小時至幾十個小時不等。承重能力上,從幾千克至幾百千克均可。多種傳感器與不同無人機的協同作業,使大規模、高強度的不同數據采集成為可能。
無人機的廣泛應用促使相關產業技術加速發展,首當其沖的就是無人機數據的記錄及處理技術。數據記錄設備是無人機系統中的重要組成部分,在載荷數據的采集與存儲領域扮演著重要角色。在數據形成后,一般都要把這些數據完好無損地存入數據記錄設備中,事后供相關人員參考使用。
在實際應用中,勘測目標分布范圍廣、隱蔽性高,探測難度越來越大,客觀上要求綜合運用多種傳感器,多角度、連續觀測,才能全方位獲取實際需要的目標信息。如在農業、地質、電力等多行業領域使用中,逐漸呈現出數據源種類多、數據容量大等特點,同時數據傳輸和分析的難度也越來越大。以無人機載荷成像技術為例,其發展就凸顯如下的特點:(1)高空間分辨率和高時間分辨率的成像精度使得數據帶寬和數據量越來越大;(2)多平臺多傳感器組網融合與集成的需求,對各個傳感器的同步性要求十分高;(3)圖像解譯技術研發和圖像數據處理判讀顯得越來越重要,要求數據存儲設備具備一定的分析能力。
最近幾年,隨著固態存儲技術的成熟應用,尤其是Nand Flash存儲介質在數據記錄設備中的普及應用,使得數據采集記錄的速度飛速提高,業界最高采集存儲速度陸續突破了幾十GB/s的水平。目前無人機領域的數據記錄設備,功能還比較單一,主要是實現了載荷數據的高速采集與存儲。然而,在當前的應用中,往往還要求數據具有快速回放、快速分析等諸多功能,同時對多源數據的同步性也提出了要求。雖然數據記錄設備和工控計算機的配合使用,能夠解決數據回放、分析的需求,但是現場復雜的物理連線、額外的互聯測試以及設備互聯帶來的可靠性、兼容性問題等都加大了現場快速部署的難度。特別是在外場進行這種數據采集作業時,更對設備的體積、重量、功耗、可靠性提出了要求,故分立的多設備互連使用方案不太適合現場的快速部署應用。同時也要看到,當前的某些工控計算機雖然也可以集成數據采集功能,但是其常規的CPCI總線帶寬限制了采集速度的提升,故單個工控機設備也無法滿足高速數據采集、回放、分析的要求。所以有必要對高速數據采集、存儲、回放、分析等功能進行綜合考慮,在單機設備中進行統一設計,用一種先進、可靠同時又具備抗惡劣環境的技術架構來集成所有這些功能。
本文給出的數據采集、存儲、分析一體化設計方案,以高速串行交換技術架構為框架,是一種集成了數據接收與采集、存儲與轉儲、處理與分析等多種功能于一體的新型電子設備,適用于農業、電力、勘探和測繪等多領域應用場景下的數據采集、記錄與分析。該設備采用系統功能一體化的設計方法,具備機械加固與抗惡劣環境的特性,并擁有便攜的良好特點。
1 高速串行交換技術介紹
在本方案的設計中,最大的難點是如何克服數據帶寬的瓶頸問題,使得數據不管在采集環節,還是在處理、分析、存儲環節,都能夠滿足高帶寬的要求。經過比較、分析,并考慮到抗惡劣環境性能的要求,選用新型VITA46標準作為系統的基礎框架總線。
VITA 46標準是自VME引入后的25年來,對VME總線架構的最重大也是最重要的改進。它增加背板帶寬,集成更多的I/O,擴展了格式布局。新串行交換結構技術使得航空嵌入式計算機系統獲得更高的性能,同時減少系統成本和重量。如今有多種高性能交換結構技術可供選擇。其中Gigabit Ethernet(GbE),Serial RapidIO(SRIO),和 PCI Express(PCIe)尤其突出,優點最多。
GbE是基于IP數據通信的標準,無論是平臺間網絡還是在同一個背板中的子系統。SRIO是DSP應用中高密度多處理簇互聯的最好方式。PCIe事實上已經是核心處理器到外圍設備高帶寬數據流傳輸應用的標準。因為不可能有一種網絡交換技術可以滿足航空嵌入式應用領域中所有的需求,所以Curtiss-Wright公司提出了分層(hierarchy)解決方案——使用GbE作為平臺間網絡互聯,并且使用SRIO和PCIe作為底板總線交換網絡互聯。通過這種方式,航空系統集成商可以在他們系統中應用交換結構技術。
GbE、SRIO以及PCIe各有優勢,如果將這些交換結構結合在一起應用于嵌入式系統中,將形成一種新的功能強大的結構。經過應用,主要芯片、板子的大量真實評估,以及主板整體設計,一種被稱為VPX的新的高性能底板問世。無論采用分布的、集中的還是混合的網絡拓撲結構,這種存在多種網絡交換的計算平臺,允許用戶選擇最合適的網絡來滿足系統需求設計。GbE可以應用于松散耦合系統的鏈接;SRIO、PCIe或兩者結合使用適合于處理器、外圍設備以及板卡之間的緊密耦合通信簇;SRIO更適用于組建網狀拓撲結構的數字信號處理器應用;PCIe更適用于核心處理器到外圍設備的高帶寬數據傳輸。
在本方案中,根據實際情況,靈活運用這二種高速串行交換技術。基于VITA46技術平臺,能夠在同一個設備內同時實現數據的高速采集、存儲、處理和分析功能。
2 數據記錄系統方案
系統方案如圖1所示,主要由信號采集模塊、信號處理模塊、主控模塊、數據存儲模塊和串行數據交換模塊組成。
采集模塊的主要功能是對各種載荷數據信號進行采集和預處理。為了適應多種類信號的采集需求,在不影響系統結構的前提下,可以按信號類型把采集模塊分類別制作成標準模塊。
信號處理模塊負責載荷數據信號的處理,并把處理結果送給主控模塊分析及顯示。根據實際的數據帶寬和處理要求,可以更換或擴展信號處理模塊,使其處理能力達到實際應用需求。信號處理模塊通常要求采用模塊化、標準化設計,使用統一的硬件平臺通過加載不同的軟件實現不同的處理功能,這樣可提高設備的可靠性,增加系統的可擴展性和靈活性,以滿足不同任務的需求。
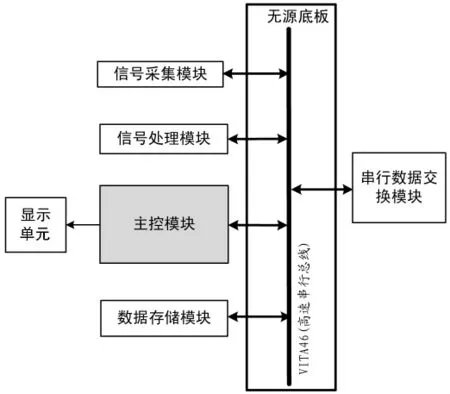
圖1 數據記錄系統結構
主控模塊作為系統的主控CPU模塊。在主控模塊上安裝本地采集控制軟件,系統顯示界面由主控模塊的顯示接口輸出。主控模塊可以采用標準單板計算機來實現。用戶可以運行采集控制軟件來進行射頻信號或數字信號的接收、采集、存儲工作,通過人機交互設備發送控制命令或接收由一體化系統反饋回來的系統狀態信息。
下面以PAL模擬視頻圖像為例,說明設備的工作流程。在進行PAL視頻數據采集存儲操作時,模擬信號從信號采集模塊輸入,經過ADC模數轉換后,成為數字信號。數字信號經過圖像數據的壓縮后,再經數據存儲模塊將數據送入Flash進行存儲。采集模塊輸出的數字信號,也可以送往信號處理模塊進行相應的數據處理,處理完成后再送往顯示器顯示并送往數據存儲模塊。在不影響設備的正常采集存儲工作的情況下,采集的數據經過高速串行總線送至主控模塊進行圖像處理,在顯示屏上實現對載荷數據的實時顯示和分析。存儲結束后,可以通過千兆網絡接口從系統中將載荷數據導出到大容量存儲系統(如磁盤陣列)中去,也可以通過采集控制軟件的回放操作,將存儲的數據在顯示屏上進行回放顯示。
數據存儲模塊是整套設備的數據存放中心,負責數據存儲,能夠接收網絡命令、網絡數據以及內部總線數據,通過高速串行總線(如SATA)將數據寫入到對應的數據存儲模塊。隨著固態存儲技術的發展,采用Flash作為數據存儲介質,可以達到很高的速度,能夠滿足現場高速數據記錄的要求。
串行數據交換模塊作為新體系數據記錄系統的數據中心,為信號采集、信號處理及數據存儲提供高帶寬的交換框架支撐,可以擴展物理采集接口,提升信號并行處理能力,提高數據存儲帶寬,提升整個系統的靈活性及可拓展性。
下面對系統方案中的主要模塊進行介紹。
2.1 信號處理模塊
信號處理模塊基于VITA46標準設計,采用DSP作為處理節點,以SRIO、PCIe和GbE作為數據和控制命令傳輸的總線。基于嵌入式系統的VITA46標準,單對線的速率達到10Gbps,解決了數據傳輸的瓶頸問題。多核DSP處理器浮點處理能力強大,帶來數據處理能力的極大提升。信號處理模塊的機械結構設計為6U板卡,插入VPX背板的相應插槽,通過數據交換板與其它板卡進行數據交換,各板卡相互之間的數據傳輸通過高速串行總線實現。信號處理模塊的接口定義按VITA46標準確定。根據實際的處理能力需求,信號處理模塊的數量可擴展至多個。
2.2 信號采集模塊
由于信號類型是多種多樣的,而采集模塊的前端物理接口種類和數量都是有限的,因此可根據實際情況,設計不同物理接口類型的板卡,滿足各種個性化的需求。
下面以典型的載荷圖像數據(Camera-Link接口可見光攝像機)為例,給出采集模塊的設計方案。如圖2所示為Camera-Link圖像采集原理框圖。原始圖像數據通過Camera-Link接口進入采集模塊,通過接口芯片的格式轉換后成為原始的RGB視頻圖像數據。RGB數據經過FPGA的控制,逐幀送往DSP進行視頻壓縮處理。經過壓縮后的數據帶寬可以下降到原來的1/10至1/100之間,且圖像質量無明顯改變。數據經DSP壓縮后,又返回到FPGA中,并以高速串行接口的方式送往其他模塊,如信號處理模塊、主控模塊或數據存儲模塊。

圖2 Camera-Link圖像采集部分原理框圖
當原始圖像數據的帶寬小于系統允許的傳輸帶寬,且圖像不允許被壓縮時,則圖2中DSP的圖像壓縮功能將被關閉。當有多路數據同時進入采集模塊時,通過FPGA的時序處理,可以使多路信號的同步性得到保證。
2.3 數據存儲模塊
數據存儲模塊中的FPGA芯片具備Flash控制器功能,在整個Flash控制技術中融入了糾錯技術、均衡管理技術、實時壞塊剔除技術等多項技術,保證存儲數據的正確性、安全性及穩定性。這幾項關鍵技術已在多個數據記錄設備項目中成熟應用。
其中,糾錯技術采用LDPC算法,用硬件高速電路并行工作,實現高性能的LDPC編碼、解碼算法,保證Flash數據的正確性。
均衡管理技術采用自主設計的算法,按照系統對數據讀寫訪問的特性,在整個存儲空間的BLOCK中均衡地進行ERASE、PROGRAM操作,從而保證整體壽命。
實時壞塊剔除技術采用壞塊實時監測電路,在讀寫過程對Flash的BLOCK狀態進行實時監測,識別整個存儲空間的BAD BLOCK,并進行標識和替換,從而保證對BAD BLOCK的實時剔除。產品上電時,硬件故障自動檢測功能會對存儲板的所有NAND Flash進行硬件狀態檢測,如果發現硬件故障,則向上層報告硬件故障的區域。
2.4 顯示單元
顯示單元是人機交互的接口,采用工業級液晶屏進行加固,已在多個加固計算機產品上批量應用,高低溫工作及振動、沖擊檢驗項目下均工作正常。顯示屏配合一體化的鍵盤鼠標,可滿足各種人機交互的輸入輸出功能。
2.5 應用軟件設計
軟件是一體化系統的核心,有合理的硬件平臺架構作為基礎,系統的性能和通用性很大程度上取決于軟件設計和開發環境的選擇。應用軟件包含的功能如圖3所示。

圖3 應用軟件設計
(1)采集設置
硬件安裝完成后,通過軟件配置,可以選擇不同信號類型的采集,比如信號類型的選擇和配置、采集頻率的配置、通道的開關設置等。
(2)同步采集
對各個接口采集到的數字信號進行持續同步采集存儲。由于載荷數據分析時對多個傳感器的同步性要求十分高,所以在傳感器數據采集的時候,就必須考慮同步性問題。本方案中,同步性指標主要通過FPGA可編程電路對多路信號源的時序處理來實現,在各路數據流中添加時間屬性。
(3)數據打包
為了滿足數據管理的要求,可對原始的數據按照特定的格式進行打包處理,添加各種數據屬性信息,比如采集時間、通道數、使用的板卡類型等。
(4)實時顯示
采集到的載荷數據,除了被送往存儲介質進行保存外,也可以實時顯示在液晶顯示屏上,便于分析查看信號的實時狀態。比如視頻圖像數據,一般在壓縮存儲的同時,需要將圖像數據送往顯示器顯示,便于操作人員實時掌握現場的實況。
(5)數據回放
根據需要,可以對存儲介質中的數據進行回放,用于分析載荷數據。
(6)數據處理
信號處理模塊與完備的人機交互設備(鍵盤、鼠標、顯示器等)相結合,并依靠相應的計算機軟件來實現數據處理任務。常用處理算法具有一定的通用性,如圖像數據壓縮處理、抽幀處理、分辨率變換等。常用處理算法外,本軟件系統也提供用戶算法接口,實現用戶特定的數據處理算法。數據處理分為實時數據處理(在線處理)與歷史數據處理(離線處理)。實時數據處理的數據源來自信號接口模塊,歷史數據處理的數據源來自數據存儲模塊。數據處理后的數據可在顯示屏顯示或存入數據存儲模塊。
3 典型應用
下面以某無人機的多源視頻圖像為例,說明高速數據記錄設備在載荷數據的采集、存儲、處理、分析中的應用。如圖4所示,該設備實現八路視頻圖像信號的接收、存儲、同步記錄、顯示與回放。
硬件配置上,一體機配置一塊視頻圖像采集模塊(具有4個Camera-Link接口、4個PAL接口)、一個信號處理模塊(加載視頻圖像分析軟件)、一個主控模塊及存儲部分的板卡。信號處理模塊完成視頻圖像實時分析(如目標物體的偵測、識別與鎖定),并把分析結果送往存儲模塊和主控模塊。
應用軟件上,包括平臺軟件和應用軟件。平臺軟件包括主控模塊的Windows操作系統、數據存儲和管理軟件、板卡配置和驅動軟件等。應用軟件包括圖像實時顯示軟件。
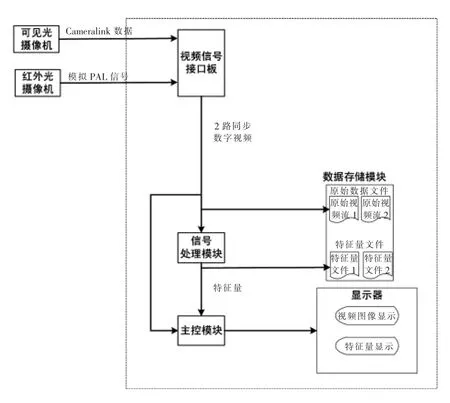
圖4 兩路載荷數據同步記錄的實現框圖
最終,在存儲介質中形成相應的數據文件(原始視頻數據文件、圖像特征量數據文件),在顯示畫面形成原始數據和特征量信息。
在實際的工程應用中,會涉及更多及更復雜的處理算法,可以在計算機的Windows平臺上集成相應的用戶算法。
4 結 語
本文介紹了一種在無人機系統中具有廣泛應用前景的高速數據采集、存儲、分析一體化設計方案,其存儲性能高達5GB/s,可以滿足多種載荷數據的連續采集、實時存儲、處理、分析的需求。本系統作為一種設計簡單而又實用的高速數據采集系統,采用高性能的串行交換VITA46技術,解決了采集系統中經常遇到的存儲速率瓶頸的問題,可以與各種載荷設備配合使用,實現載荷數據的高速采集、安全存儲、高效管理及有效使用。同時,該平臺同時具備計算機和高性能信號處理的功能,故在存儲功能的基礎上還可實現數據的實時顯示、現場回放、實時分析等功能,適用于農業、電力、勘探和測繪等多領域應用場景下的載荷數據采集、記錄與分析。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
工業設計(2016年12期)2016-04-16 02:52:00
