剛柔耦合動力學
——輕量化協作機器人設計與控制的力學基礎——解讀《機器人剛柔耦合動力學》
2019-01-08 11:36:18尹海斌
中國機械工程 2018年24期
尹海斌
武漢理工大學湖北省數字制造重點實驗室,武漢,430070
1 機器人技術的發展趨勢
1.1 背景與現狀
隨著技術的發展、社會的進步,人們越來越意識到人與自然和諧相處的重要性,其中最重要的一條就是減少對大自然的索取與排放,為此,人們提出了工業發展的節能減排約束機制。機器人技術的發展也應該遵循這一工業化發展的大趨勢,向節能化方向發展。另外,隨著用工成本的上升、社會老齡化的加劇,機器人越來越被看好,它是一個可以替代人工去做很多繁重和重復性工作的工具;要提高機器人的人工替代率,機器人必須具有一定的智能。因此,節能與智能是機器人技術發展的兩大趨勢。
現有的絕大多數機器人結構設計是結構剛度最大化,以減小機器人結構的振動而實現精確的運動定位。但是,這種最大化剛度結構的機器人用材多、不經濟,結構笨重不節能,慣量大而動態性能差,生產效率低。況且,不存在絕對的剛性結構,一定條件的輸入會激勵出一定頻率的振動,即使設計成最大化剛度結構,機器人在高速重載的工作條件下同樣面臨著結構振動的問題。因此,要提高機器人運動的精度(降低柔性結構振動),往往會以犧牲其性能指標(節能經濟、動態性、效率、工作條件)為代價。
機器人大量應用于工農業生產,但其人工替代率仍不足1%,這是因為機器人還不能夠如人一般自主適應外界環境和目標的變化,進行自主安全的運動和操作。柔順結構或柔順關節具有很好的適應性能,能夠適應環境和目標的變化,能夠感知操作者的動作意圖,但同時也會存在結構振動從而帶來運動控制精度的問題。
柔性機器人輕量節能,對環境和目標的變化具有適應性,但也存在因為結構剛度較低而導致的結構振動的問題。要想充分利用柔性結構的優點,關鍵是要解決柔性結構帶來的振動問題。為此,國內外許多研究人員對柔性機器人的各種關鍵技術進行了大量研究。
1.2 發展概述
對柔性機器人關鍵技術的研究就是對其共性問題——剛柔耦合動力學綜合問題的研究。首先,需要建立一個能代表真實系統的精確模型來預測分析其動態行為。在這一研究領域,有大量的關于柔性臂動態建模與分析的研究,Dwivedy發表了一篇這個領域的評論文章,分析了1974-2005年間的主要研究成果。
根據這些已發表的研究論文,用于計算柔性機器人動力學的柔性描述方法可以歸納為3種。最常見、應用最廣泛的方法是線性的彈性變形描述,大量的文獻中都采用了這種最常見的線性描述方法來建立柔性機器人的動力學模型。近20年來,也有一些研究論文討論了二次變形描述方法,它考慮了軸向縮短和橫向彎曲;在連續柔性結構的離散計算中,二次變形描述中只有橫向彎曲被認為是柔性位移。2005年,Lee提出了一種新的變形描述方法推導柔性梁的動態方程,這個新的變形描述方法基本上等效于二次變形描述方法,不同的是橫向彎曲與軸向縮短被綜合為一個向量來用作柔性位移。這個新方法很少被用于柔性機器人的動態建模與分析,《機器人剛柔耦合動力學》(下稱“本專著”)中詳細討論了如何用這個方法建立柔性機器人動態模型。
除此之外,柔性機器人的動態控制也是一個很重要的研究課題。在過去的數十年中,許多研究人員對柔性機器人的動態控制進行了研究。2004年,Benosman提出了柔性機器人動態控制的綜述文章,分析總結出4類目標和20種方法(表1)。這些動態控制方法一般基于具體的柔性機器人動態模型與分析,因此,采用上述新的變形描述方法建立柔性機器人動態模型,需要研究與之相應的動態控制器設計方法。這些相關的研究成果是機器人剛柔耦合動力學發展過程的體現,也是本專著的主要內容。
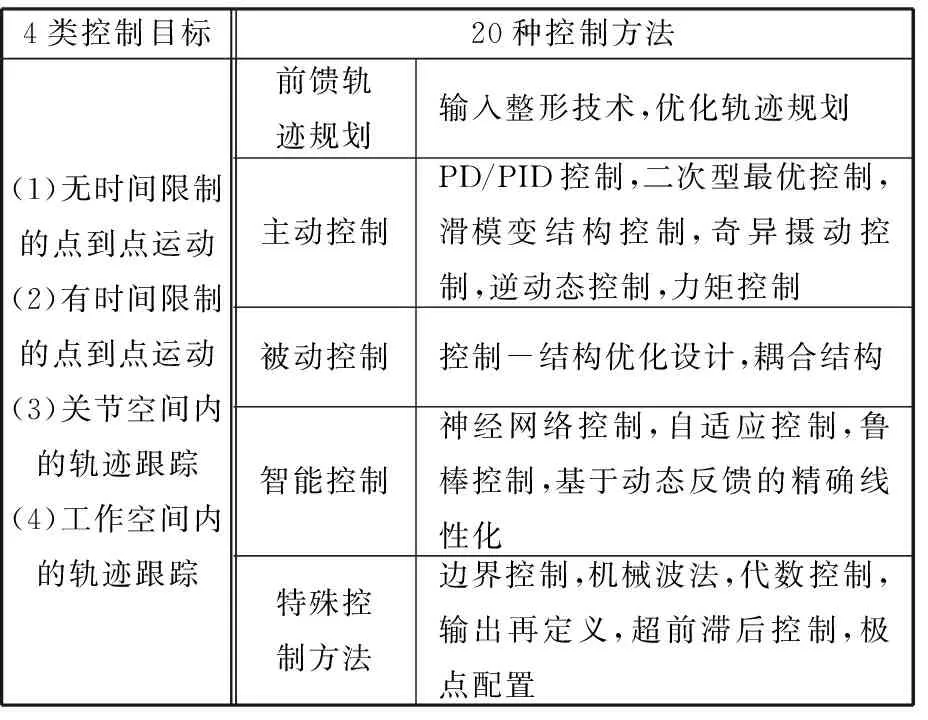
表1 柔性機器人動態控制目標與方法
2 《機器人剛柔耦合動力學》主要內容
2.1 內容涵蓋范圍
機器人種類繁多,從構型上看,可以歸納為機器人手臂、移動機器人以及人形機器人。機器人手臂又分為串聯式和并聯式,移動機器人可分為陸地移動型和空中飛躍型,人形機器人是前兩者的集大成,是可以移動的機械臂或四肢。因此,在機器人構型研究中,機械臂和移動機器人是典型的代表。
本專著中所介紹的機器人也主要指這兩類機器人,其結構中采用了柔性單元,分別為柔性機械臂和柔性懸掛移動機械臂。
2.2 內容介紹
表2詳細列出了本專著的主要內容,包括3個部分和8個章節。第一部分是概述,介紹了機器人動力學研究的意義;第二部分主要介紹柔性機械臂的研究成果,共四章;第三部分主要介紹柔性懸掛移動機械臂的研究成果,共三章。為了便于讀者對專著有一個大致了解,下面主要對柔性機械臂與柔性懸掛移動機械臂的研究內容及研究關系做一個介紹。
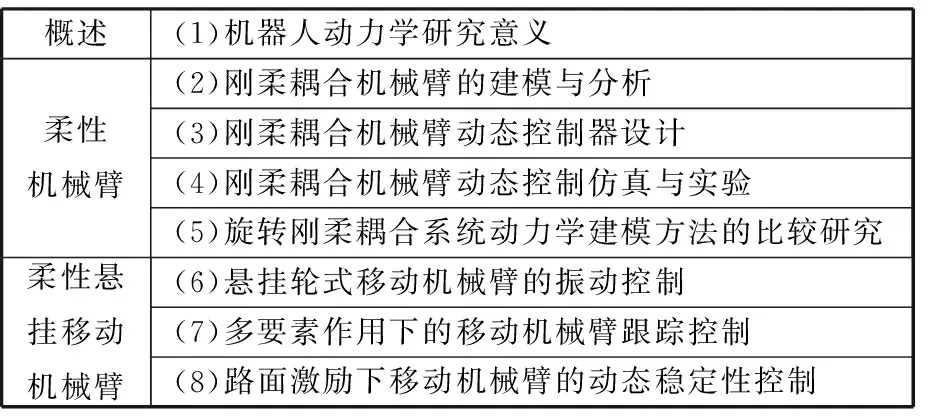
表2 《機器人剛柔耦合動力學》主要內容
本專著中,柔性機械臂的研究成果主要涉及柔性機械臂的動態建模與分析、動態控制與實驗、建模方法的比較研究等內容。
柔性機械臂建模時,采用了一種新的變形描述方法計算柔性變形。在模型分析計算時,一種情況認為,柔性臂關節軌跡的角度函數與其柔性狀態之間保持獨立;另外一種情況認為,驅動關節剛度不足時,柔性臂關節軌跡的角度函數將會受到其柔性狀態的影響。因此,前者不用考慮關節柔性,后者需要考慮關節柔性。
上述動態模型分析指出,柔性臂的動力學模型是一個強非線性系統且系統慣量矩陣的逆存在奇異。為了避免計算慣量矩陣的逆時出現奇異,并減小高階復雜模型的計算難度,全階的動力學模型被分解為一個柔性子系統和一個剛性子系統。基于這兩個動力學子系統,提出了一個分解的動態控制方法,它由柔性動態控制模塊(FDC)和剛性動態控制模塊(RDC)組成。FDC模塊旨在尋找期望的軌跡,盡可能減小激勵振動;RDC模塊的任務則是跟蹤期望的軌跡并補償不確定的動態。控制器設計后,實驗證明了分解的動態控制是有效的。
前期的研究表明,柔性機械臂動態模型仍不夠準確,會造成動態控制器的設計更加復雜。為了更加準確地預測動態行為、降低動態控制的設計難度,建立一個更加準確的柔性機械臂動態模型是非常必要的。通過柔性機械臂動態建模方法的比較研究發現,建模中采用的柔性梁邊界條件比柔性變形描述方法對柔性機械臂動態模型的精度影響更明顯;研究提出了一種用于精確建立柔性機械臂動態模型的邊界條件的辨識方法。
另外,柔性懸掛移動機械臂的研究成果涵蓋柔性懸掛移動平臺振動控制、移動機械臂軌跡規劃、移動機械臂穩定性研究等內容。
柔性懸掛移動平臺振動控制研究了兩種情況下的問題:一是機械臂靜止而柔性懸掛平臺運動時,最優的多輸入整形法能有效抑制振動;二是機械臂和柔性懸掛平臺都運動時,混沌粒子群優化算法可以通過尋找時間與加加速度的綜合最優路徑來有效地減小振動。
柔性懸掛移動機械臂的軌跡追蹤問題考慮了多種因素:理想的輪子純滾動,非理想的輪子滑動,柔性懸掛移動平臺與機械臂之間的相互作用。為了讓多要素作用下移動機械臂的動態控制器都能精確地追蹤軌跡,使用了模糊補償器來減少不確定性因素的影響。
為了解決柔性懸掛移動機械臂在通過不平路面時的穩定性問題,提出了一種半主動的變阻尼器,建立了與半主動懸架的變量相關的振動微分方程,最后得出封閉形式的移動機器人穩定性計算方法,并通過引入機器人小車的重量與不平路面引起的重心位置變化量,對動態穩定性計算方法進行了改進。
3 機器人剛柔耦合動力學研究的科學意義
3.1 剛柔耦合動力學研究的本質問題
剛柔耦合動力學的研究包羅萬象,但本質上是柔性機器人系統動力學綜合優化問題。為了理解其研究的意義,我們首先來回顧一下動力學的概念及其任務。
動力學源于力學的研究,它是理論力學的分支學科,主要研究物體的運動與力之間的關系。后來,動力學的概念被引申用于更多學科的研究,出現了系統動力學的概念:系統動力學主要研究系統輸入與系統狀態之間的關系。比如經濟動力學,海洋環流動力學、氣象動力學及生物動力學等。可見,動力學不再局限于物體的運動與力之間的關系,而是一個應用廣泛的概念。
圖1所示為機電系統動力學問題的一般描述,在一個系統上有一定的輸入作用,就會有一定的輸出響應。系統的輸入、輸出及系統本身是一個系統動力學的三要素。系統動力學的研究就是對這三個要素進行研究。

圖1 機電系統動力學三要素
動力學三要素對應動力學的3個任務。如圖2所示,當系統未知或待求解時,需要進行系統建模或者系統辨識(modeling or identification),這是第一個研究任務;當系統輸出未知或需要分析系統輸出狀態時,需要進行系統仿真(simulation)研究;當系統輸入未知、需要確定輸入時,需要研究系統動態控制問題(control)。
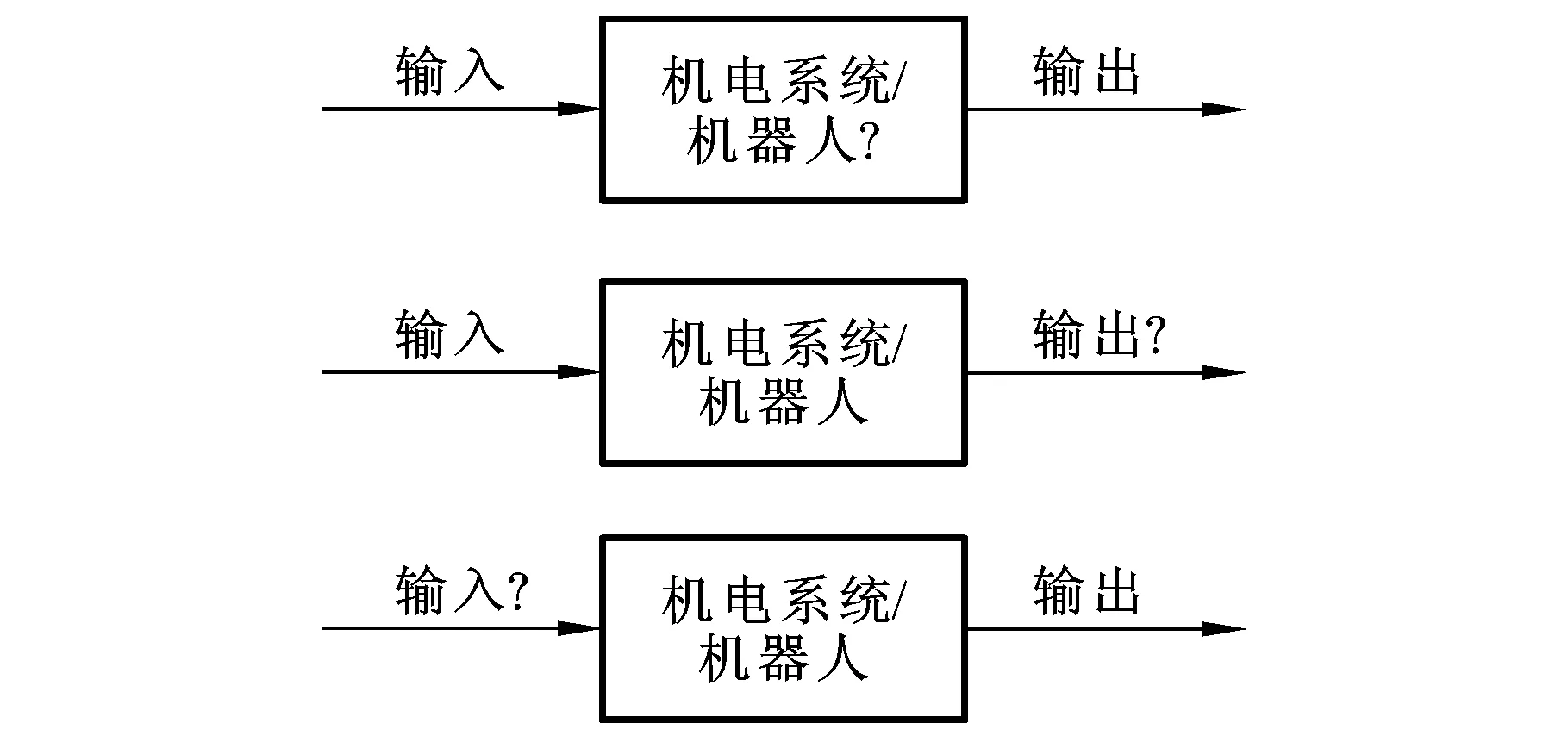
圖2 系統動力學三任務
對于較高要求的機電系統設計,這3個任務是相互關聯的,需要整體考慮。假定某一系統動力學模型可描述如下:
M(s,K,X)=u
其中,u和X為系統輸入和輸出狀態;s和K為結構參數和動態控制參數。
在系統輸入u的作用下,有輸出狀態X的響應,該響應將受到結構參數s與控制參數K的影響。要想獲取期望的輸出響應,可以設計輸入u、結構參數s和控制參數K,三者之間是相互關聯的。例如,機械臂系統設計中,期望的性能指標是要求快速并精確定位,結構輕量化設計(調整結構參數s)能提高快速性,但這又會導致剛度不足,降低定位精度。我們可以通過規劃輸入軌跡u來減小激勵振動,或者調整反饋控制參數K來抑制振動。
因此,柔性機器人動態控制實質上是一個統籌考慮機械臂動力學的輸入、系統結構和反饋參數的綜合優化問題,涉及到機器人動力學的建模、分析與控制等內容。
3.2 機器人剛柔耦合動力學研究的意義
機器人剛柔耦合動力學的研究有助于我們理解如下幾類工程實踐問題。
對于剛性機械臂,追蹤期望的軌跡時,基于動力學模型的位置控制能夠提高軌跡跟蹤的實時性和精度,通過內環力矩控制模式實現外環軌跡的跟蹤(圖3a)。
對于柔性機械臂,比如輕型機械臂、細長機械臂、高速重載機械臂等都屬于柔性臂的范疇,它們都面臨柔性結構振動的共性問題。對柔性臂進行研究就是要研究如何減小柔性結構振動、提高機械臂的動態性能。我們可以把這些研究歸納為兩類問題:一類是性能提升(圖3b),主要是針對現有的機械臂,通過反饋控制提高機械臂動態剛度來減小因系統輸入性能的提升而出現的結構振動,比如要提高某一機械臂的工作速度或負載質量;另一類是輕量優化設計(圖3c),就是利用現代設計方法,依據動力學模型,設計滿足約束條件和目標要求的輕型機械臂。因此,柔性機械臂動力學研究的意義在于:能夠提高機械臂的輕量化程度、提高工作空間范圍、提升工作性能等。
對于移動機器人,純剛性設計會出現較差的平順性能和較弱的環境適應能力,因此,要提升移動機器人的平順性和對環境的適應性,就要有針對性地設計具有柔順機構的移動機器人,研究柔順機構移動機器人平臺的剛柔耦合動力學問題,確定其結構剛度與動態剛度的關系。這也可以歸類為圖3c中的優化設計問題。
在人機動態交互過程中,剛性關節不能感知交互意圖;利用機器人柔順關節對力矩敏感的特征能夠感知人機交互的意圖,但是柔順關節在運動過程中也會存在柔性結構振動的問題(圖3d),協作機器人柔順關節的阻抗控制需要跟蹤力矩目標和振動控制。
總之,機器人剛柔耦合動力學的研究能夠提升機器人的動態性能和適應能力,具有重要的科學意義和工程實踐價值。
4 結語
《機器人剛柔耦合動力學》一書對柔性機器人的建模、仿真與動態控制等方面的內容作了較全面的分析和介紹,主要介紹了兩種典型的機器人:柔性機械臂和柔性懸掛移動機械臂。柔性機械臂的研究內容有剛柔耦合動力學建模方法、動力學分析與動態控制器設計,這些研究為機械臂的振動控制提供了理論與方法。柔性懸掛移動機械臂的研究內容有柔性懸掛移動機器人振動控制方法、多要素作用下移動機械臂的跟蹤控制和路面激勵下移動機器人的動態穩定性控制,這些方法為柔性懸掛移動機器人動態控制奠定了理論基礎。
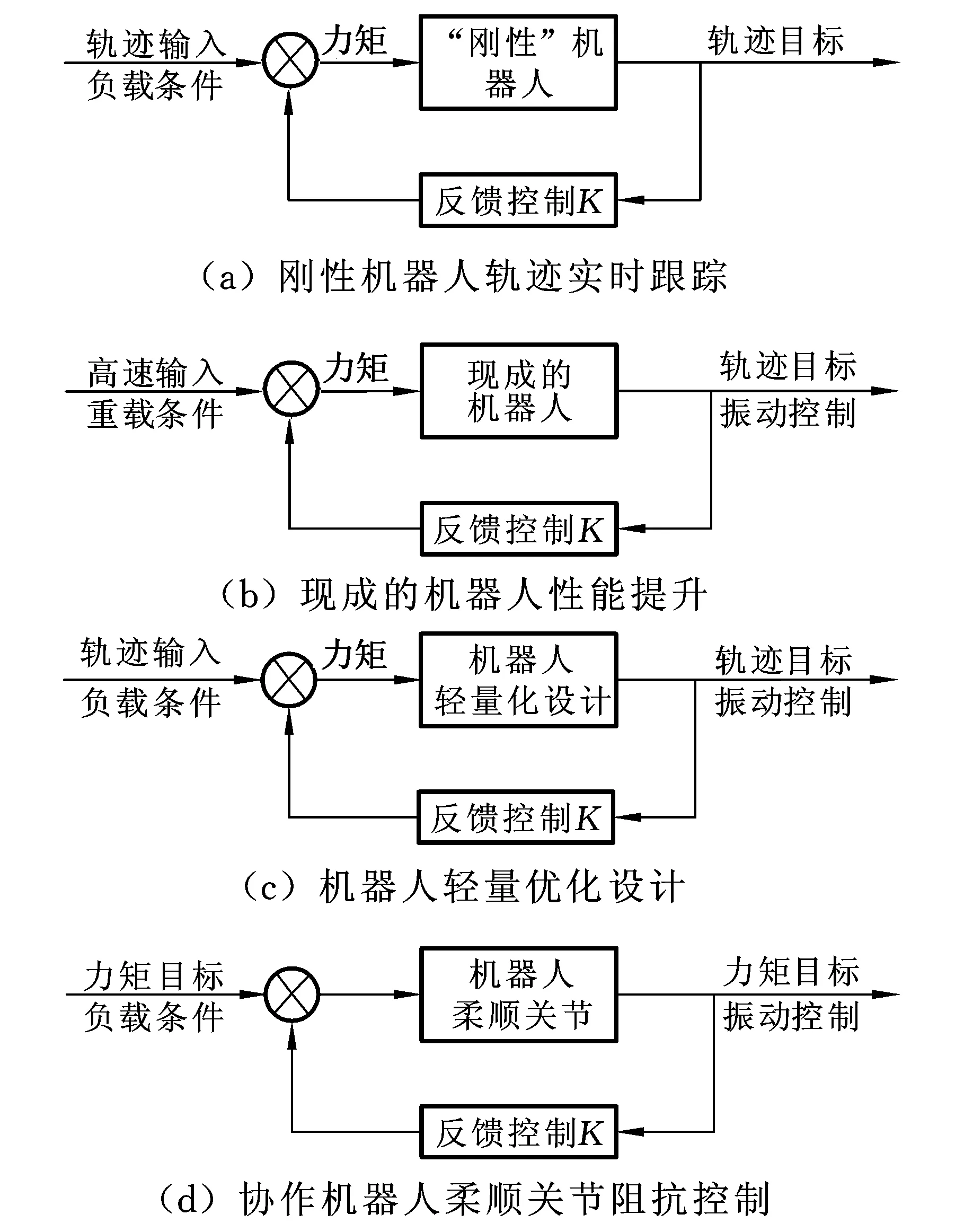
圖3 機器人剛柔耦合動力學研究原理圖
作者力圖總結在機器人剛柔耦合動力學研究領域取得的一些研究成果。這些研究成果的總結能夠為提高機器人的性能與品質提供理論基礎和實踐方法,使讀者能夠借鑒并用于機電設備的減振降噪、機器人的精確控制和性能提升、機械臂的輕量優化設計、細長等特種機械臂的設計、柔順平臺的開發和人機協作機器人柔順關節的動態控制等方向。該書可以作為機械工程、自動化與控制工程等相關學科方向的教師、研究人員的參考資料,也可以作為機器人技術領域的廣大工程技術人員,特別是產品開發技術人員學習和工作的參考書。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
當代工人(2020年8期)2020-05-25 09:07:38
數學物理學報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09