預(yù)測(cè)控制技術(shù)用于燃煤鍋爐再熱汽溫控制的研究
2019-01-07 01:41:48高星宇甄偉靜武曉華
山東電力技術(shù) 2018年12期
關(guān)鍵詞:模型
楊 碩,高星宇 ,甄偉靜 ,武曉華
(1.湛江中粵能源有限公司,廣東 湛江 524099;2.河北省發(fā)電過程仿真與控制工程技術(shù)研究中心(華北電力大學(xué)),河北 保定 071003)
0 引言
目前國(guó)內(nèi)大型火電機(jī)組的鍋爐再熱汽溫控制,仍采用常規(guī)的串級(jí)PID控制系統(tǒng)。而電廠汽溫對(duì)象的慣性很大,且噴水閥存在嚴(yán)重的非線性,當(dāng)機(jī)組負(fù)荷變化時(shí),汽溫可能偏離設(shè)定值8~10℃,超溫頻繁,嚴(yán)重影響火電機(jī)組的安全、經(jīng)濟(jì)運(yùn)行[1]。為此,針對(duì)這類具有大時(shí)滯特點(diǎn)的熱工系統(tǒng)的先進(jìn)控制算法的研究一直是控制領(lǐng)域的重點(diǎn)。
面向大滯后過程比較有效的控制方法一般有Smith預(yù)估、神經(jīng)網(wǎng)絡(luò)控制、專家控制、預(yù)測(cè)控制等。這些控制算法中,預(yù)測(cè)控制憑借其對(duì)模型精度要求低、在線優(yōu)化計(jì)算方便、易實(shí)現(xiàn)、綜合控制質(zhì)量好的優(yōu)點(diǎn)[2],受到了工業(yè)生產(chǎn)的青睞。 文獻(xiàn)[3]將基于模型的預(yù)測(cè)控制方法應(yīng)用于電站的控制中,以解決電廠控制中的汽溫控制問題。
預(yù)測(cè)控制是20世紀(jì)70年代后期提出,到20世紀(jì)80年代預(yù)測(cè)控制的應(yīng)用和研究有了很大發(fā)展。預(yù)測(cè)控制是基于被控對(duì)象預(yù)測(cè)模型的控制算法,模型包含了對(duì)象歷史動(dòng)態(tài)信息。針對(duì)未來控制策略,預(yù)測(cè)模型可以預(yù)估系統(tǒng)未來狀態(tài),根據(jù)具體算法進(jìn)行控制。基于輸出預(yù)測(cè)的PID控制、D步超前預(yù)測(cè)等算法,以湛江電廠600 MW亞臨界燃煤機(jī)組再熱汽溫被控對(duì)象進(jìn)行仿真試驗(yàn),對(duì)預(yù)測(cè)算法進(jìn)行分析。
1 600 MW機(jī)組鍋爐再熱汽溫被控對(duì)象的動(dòng)態(tài)數(shù)學(xué)模型
預(yù)測(cè)控制以被控過程的數(shù)學(xué)模型為設(shè)計(jì)基礎(chǔ)。以湛江電廠2號(hào)機(jī)組(600 MW機(jī)組)為測(cè)試對(duì)象,測(cè)試再熱汽溫被控對(duì)象的動(dòng)態(tài)特性。由于該廠再熱器設(shè)計(jì)與布置的問題,導(dǎo)致煙氣擋板在關(guān)到最小的情況下,依然無法降低再熱蒸汽溫度,故犧牲機(jī)組的熱效率,采用事故噴水減溫控制。由于導(dǎo)前區(qū)溫度測(cè)點(diǎn)布置太靠近減溫器,進(jìn)入飽和區(qū),不能進(jìn)行串級(jí)控制。
進(jìn)行現(xiàn)場(chǎng)特性試驗(yàn)。試驗(yàn)過程中不改變機(jī)組的AGC指令,將機(jī)組負(fù)荷穩(wěn)定在480 MW工況上。手動(dòng)階躍改變鍋爐A側(cè)再熱汽溫噴水閥的開度10%,對(duì)再熱汽溫做噴水減溫?cái)_動(dòng)試驗(yàn),記錄相關(guān)的試驗(yàn)數(shù)據(jù)。鍋爐A側(cè)和B側(cè)再熱噴水閥指令正、反方向的階躍擾動(dòng)試驗(yàn)曲線基本相同,經(jīng)對(duì)記錄數(shù)據(jù)進(jìn)行模型擬合,獲得再熱減溫噴水閥開度變化Δμ,對(duì)末級(jí)再熱器出口汽溫變化ΔT的動(dòng)態(tài)數(shù)學(xué)模型為
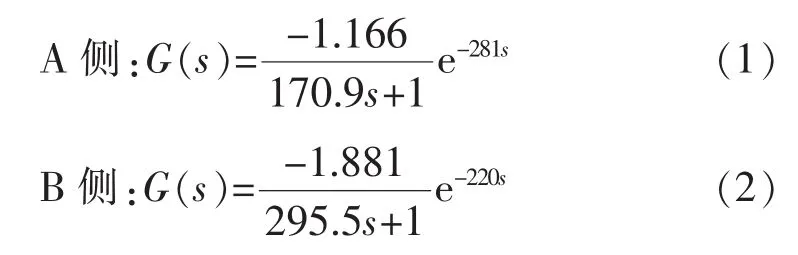
不失一般性,以B側(cè)再熱汽溫為例進(jìn)行分析。
2 基于輸出預(yù)測(cè)的PID控制
PID預(yù)測(cè)控制是在經(jīng)典PID控制系統(tǒng)的反饋環(huán)節(jié)上增加了一個(gè)預(yù)測(cè)器,如圖1所示。
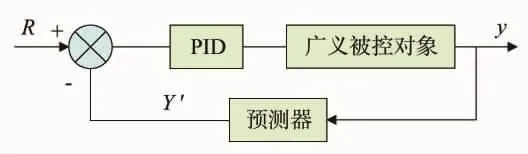
圖1 PID預(yù)測(cè)控制系統(tǒng)方框圖
PID預(yù)測(cè)控制系統(tǒng)可以選擇不同類型的預(yù)測(cè)器,本文分別以CARMA模型和灰色模型為例,介紹控制系統(tǒng)的實(shí)現(xiàn)過程。
2.1 基于CARMA模型預(yù)測(cè)的PID控制
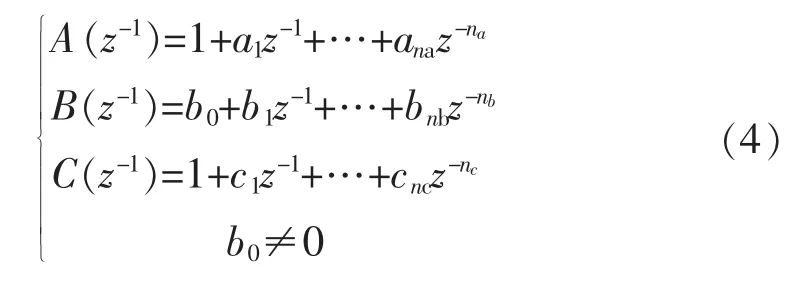
被控對(duì)象的CARMA模型[4]表示為

式中:y(t),u(t)和 ω(t)分別表示輸出、控制量和白噪聲;d為純遲延。有
經(jīng)過推導(dǎo)可以得到


式中:l為遲延系數(shù)。
針對(duì)B側(cè)再熱汽溫對(duì)象,采用基于CARMA模型的PID預(yù)測(cè)控制。在單位階躍輸入信號(hào)作用下,系統(tǒng)在名義模型和失配時(shí)的控制效果如圖2~5所示。PID控制與基于CARMA預(yù)測(cè)PID控制系統(tǒng)控制品質(zhì)對(duì)比見表1。
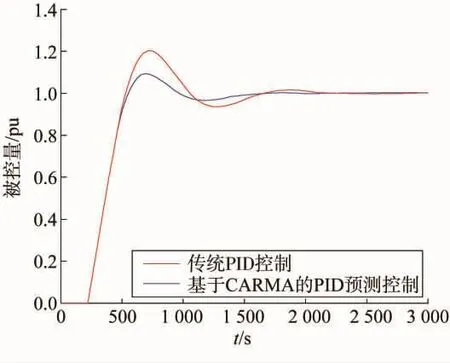
圖2 名義模型PID與CARMA預(yù)測(cè)PID系統(tǒng)被控量曲線
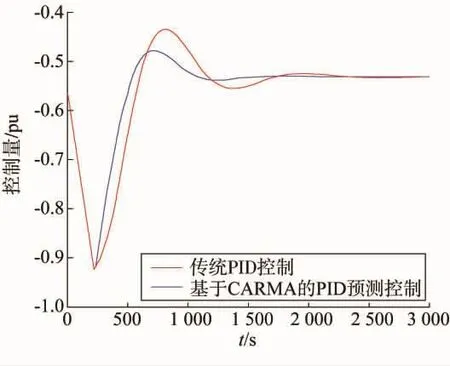
圖3 名義模型PID與CARMA預(yù)測(cè)PID系統(tǒng)控制量曲線
觀察兩組曲線和控制品質(zhì)可以發(fā)現(xiàn):名義模型時(shí),相同參數(shù)的PID控制作用下,加入CARMA模型預(yù)測(cè)反饋可以大幅度縮短穩(wěn)定時(shí)間,減少超調(diào)量;模型失配時(shí),兩種控制控制品質(zhì)都有較大程度的惡化,但基于CARMA預(yù)測(cè)的PID控制魯棒性是優(yōu)于傳統(tǒng)PID控制的;加入CARMA模型預(yù)測(cè)反饋后,PID控制下的輸出波動(dòng)情況有所平滑。
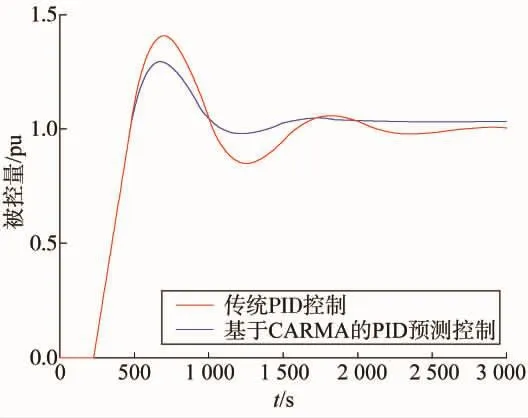
圖4 模型失配PID與CARMA預(yù)測(cè)PID系統(tǒng)被控量曲線
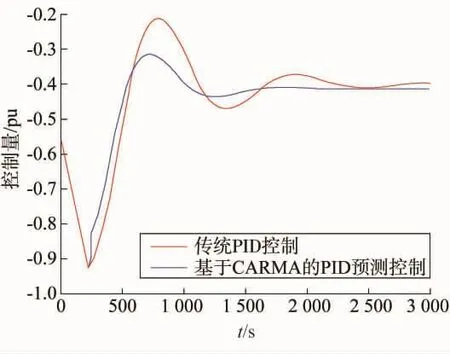
圖5 模型失配PID與CARMA預(yù)測(cè)PID系統(tǒng)控制量曲線
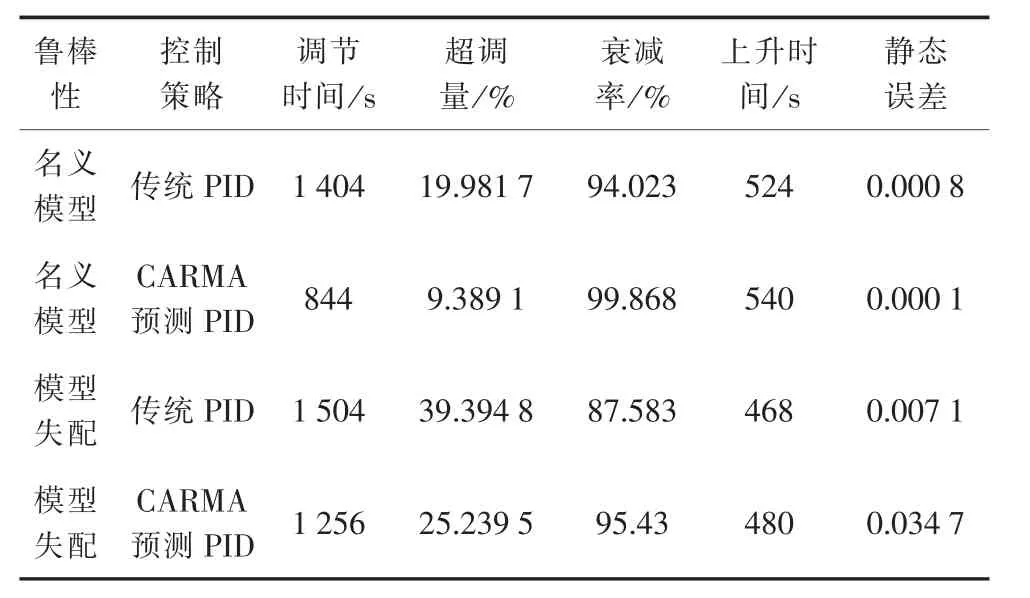
表1PID控制與基于CARMA預(yù)測(cè)PID控制系統(tǒng)控制品質(zhì)對(duì)比
2.2 基于灰色模型預(yù)測(cè)的PID控制
信息中部分明確、部分不明確的系統(tǒng)稱灰色系統(tǒng)。灰色預(yù)測(cè)是根據(jù)系統(tǒng)中有限的一組歷史數(shù)據(jù),建立灰色模型(GM),再根據(jù)所得模型預(yù)測(cè)灰色系統(tǒng)的未來行為[5]。 灰色預(yù)測(cè)的基本流程[6]如圖 6所示。

圖6 灰色預(yù)測(cè)流程
原始數(shù)據(jù)預(yù)處理包括對(duì)數(shù)據(jù)進(jìn)行濾波、去除粗大值處理、均值處理。灰色序列生成可以將數(shù)據(jù)中隱藏的規(guī)律增強(qiáng),本文選擇累加生成方法。第一個(gè)數(shù)據(jù)不變,第二個(gè)數(shù)據(jù)是原始的第一與第二個(gè)數(shù)據(jù)相加,第三個(gè)數(shù)據(jù)是原始的第一、第二與第三個(gè)相加……得到的灰色模型P步預(yù)測(cè)結(jié)果為

ag,bg是灰色模型參數(shù),辨識(shí)公式為
式中:x(0)為原始數(shù)據(jù),x(1)為一次累加后的數(shù)據(jù)。
針對(duì)上一節(jié)中的過程對(duì)象,進(jìn)行基于灰色預(yù)測(cè)的PID控制。在單位階躍輸入信號(hào)作用下,系統(tǒng)在名義模型和失配時(shí)的控制效果如圖7~10所示,控制品質(zhì)對(duì)比見表2。
觀察上述曲線和各自的控制品質(zhì)發(fā)現(xiàn):名義模型時(shí),加入灰色模型預(yù)測(cè)反饋可以縮短穩(wěn)定時(shí)間,大幅度減少超調(diào)量;模型失配時(shí),基于灰色預(yù)測(cè)PID控制的魯棒性優(yōu)于傳統(tǒng)PID控制。
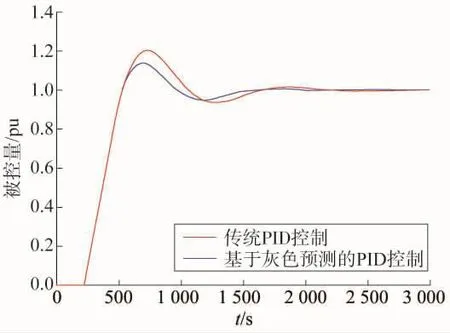
圖7 名義模型PID與灰色預(yù)測(cè)PID控制系統(tǒng)被控量曲線
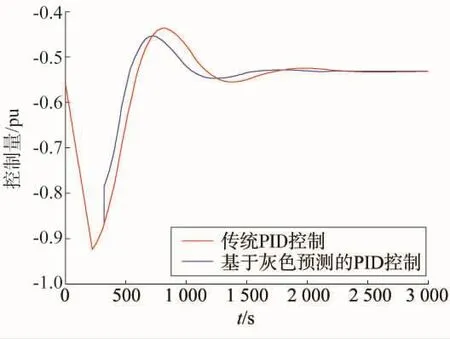
圖8 名義模型PID與灰色預(yù)測(cè)PID控制系統(tǒng)控制量曲線
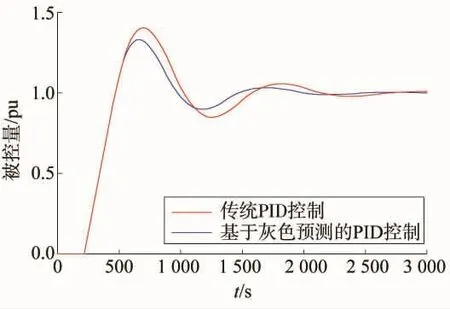
圖9 模型失配PID與灰色預(yù)測(cè)PID控制系統(tǒng)被控量曲線

圖10 模型失配PID與灰色預(yù)測(cè)PID控制系統(tǒng)控制量曲線
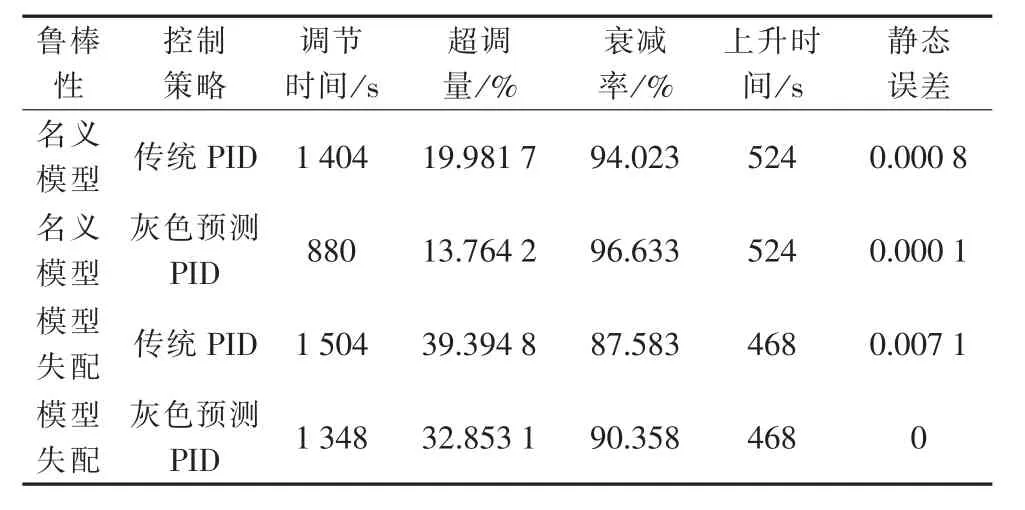
表2 PID控制與基于灰色預(yù)測(cè)PID控制系統(tǒng)控制品質(zhì)對(duì)比
3 D步超前預(yù)測(cè)控制
對(duì)被控對(duì)象進(jìn)行多步超前預(yù)測(cè),取超前控制量數(shù)為M,預(yù)測(cè)步數(shù)為P,預(yù)測(cè)輸出為

前l(fā)-1步為CARMA預(yù)測(cè)模型,余下P-l+1步寫成矩陣表達(dá)式

其中

由此可以得到多步預(yù)測(cè)的目標(biāo)函數(shù)如式(17)。當(dāng)取 Jd極小值,得到 ΔU=(GTG+I(xiàn))-1GTF,由此可以得到未來k時(shí)刻的控制量,實(shí)現(xiàn)對(duì)被控對(duì)象的控制。單位階躍輸入D步預(yù)測(cè)控制效果如圖11~14所示,控制品質(zhì)對(duì)比見表3。

式中:yr為期望輸出值。

圖11 傳統(tǒng)PID控制與D步預(yù)測(cè)控制系統(tǒng)被控量曲線
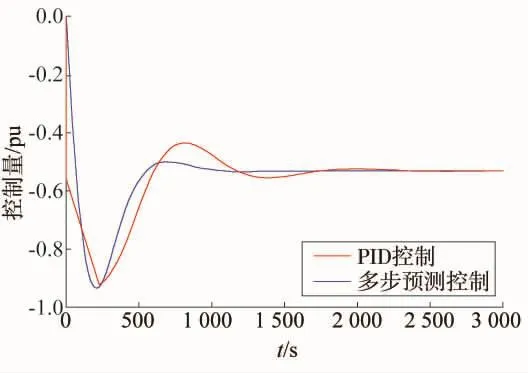
圖12 傳統(tǒng)PID控制與D步預(yù)測(cè)控制系統(tǒng)控制量曲線
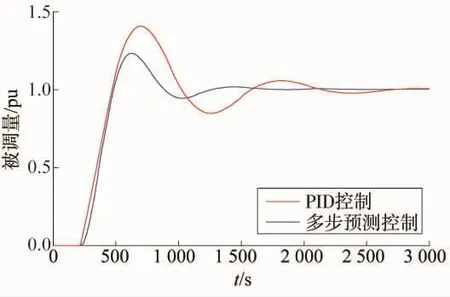
圖13 工況改變時(shí)PID與D步預(yù)測(cè)控制系統(tǒng)被控量曲線
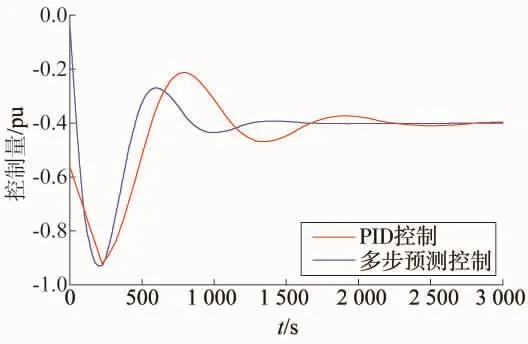
圖14 工況改變時(shí)PID與D步預(yù)測(cè)控制系統(tǒng)控制量曲線
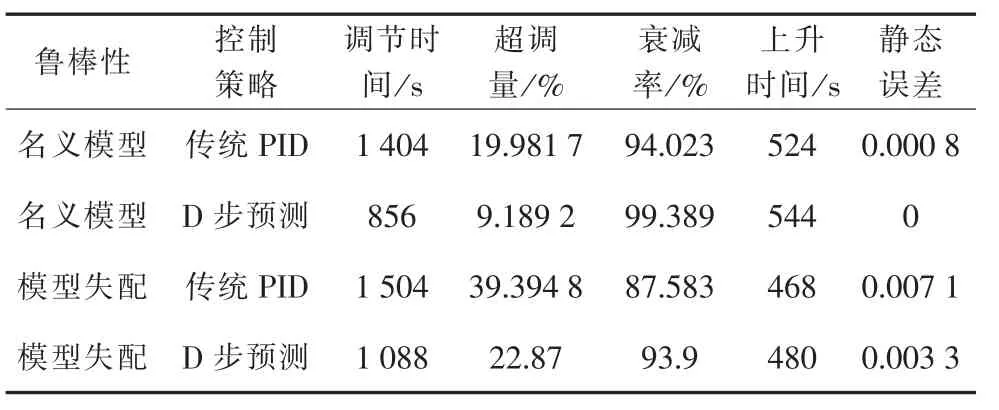
表3 PID控制與D歩預(yù)測(cè)控制系統(tǒng)控制品質(zhì)對(duì)比
觀察上述曲線和各自的控制品質(zhì)發(fā)現(xiàn):名義模型時(shí),D步預(yù)測(cè)可以縮短穩(wěn)定時(shí)間,減少超調(diào)量,改善品質(zhì);模型失配時(shí),D步預(yù)測(cè)控制系統(tǒng)魯棒性不如傳統(tǒng)PID控制系統(tǒng)的。
4 結(jié)語
針對(duì)大慣性的再熱汽溫系統(tǒng),選取多種預(yù)測(cè)控制策略與傳統(tǒng)PID控制進(jìn)行仿真研究,可以看出預(yù)測(cè)控制技術(shù)可以克服大遲延對(duì)控制系統(tǒng)的影響,有效改善系統(tǒng)的控制品質(zhì),提高魯棒性。預(yù)測(cè)控制技術(shù)對(duì)于大慣性、大滯后的熱工過程控制是有效的,在熱工過程控制中具有廣闊的應(yīng)用前景。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
