車載激光掃描數(shù)據(jù)的結(jié)構(gòu)化道路要素自動(dòng)提取方法
2019-01-07 01:04:46梁新美
測(cè)繪通報(bào) 2018年12期
關(guān)鍵詞:特征
韓 旭,梁新美
(中國地質(zhì)大學(xué)(武漢),湖北 武漢 430074)
隨著近年來無人駕駛、機(jī)器導(dǎo)航的出現(xiàn)和發(fā)展,對(duì)道路識(shí)別的研究日益受到重視,從原先基于單目影像的二維視覺逐步開始側(cè)重立體視覺方面[1],三維激光點(diǎn)云數(shù)據(jù)的處理及基于點(diǎn)云數(shù)據(jù)提取道路要素的研究變得更加重要[2]。而車載點(diǎn)云數(shù)據(jù)作為道路兩側(cè)三維數(shù)據(jù)獲取的重要來源[3],是道路提取的重點(diǎn)研究數(shù)據(jù),從車載激光點(diǎn)云中準(zhǔn)確提取道路結(jié)構(gòu),是三維建模領(lǐng)域需要首要解決的重要問題之一[4]。雖然在機(jī)載激光掃描點(diǎn)云數(shù)據(jù)中相關(guān)研究已經(jīng)較為深入,但由于掃描方式、點(diǎn)云密度、幾何特征等不同,機(jī)載激光點(diǎn)云數(shù)據(jù)的處理方式并不完全適用于移動(dòng)激光掃描點(diǎn)云數(shù)據(jù)[5],相比前者,從后者提取道路更為艱難[6]。本文研究在不同層次對(duì)象提取不同特征的方法,在滿足一定精度的基礎(chǔ)上盡可能地提高效率。
1 點(diǎn)云預(yù)處理
常見的道路結(jié)構(gòu)類型一般由車道、人行道及二者的連接結(jié)構(gòu)路坎組成[7]。
車載掃描系統(tǒng)掃描軌跡線通常沿道路延伸方向獲取道路及其周邊的點(diǎn)云數(shù)據(jù),且通常包含掃描角度信息[8]。另外,由于特征提取極為耗時(shí)[9],因此可以通過掃描角度約束將點(diǎn)云分割,獲得感興趣區(qū)域,縮小處理范圍。約束公式為
SI={Pi|-45°≤θ(Pi)≤45°,Pi∈Spart}
(1)
式中,SI為掃描角度約束后的點(diǎn)集;Spart為車載掃描點(diǎn)云片段點(diǎn)集;θ(Pi)為點(diǎn)Pi的掃描角度。
2 基于局部特征約束的點(diǎn)云分割
點(diǎn)云的局部特征可以用來反映點(diǎn)云在極小范圍內(nèi)掃描值的變化規(guī)律,從而對(duì)點(diǎn)云進(jìn)行標(biāo)識(shí)和分類。本文利用高程梯度約束方法將點(diǎn)云標(biāo)記為道路點(diǎn)和路坎點(diǎn)兩類,然后進(jìn)行點(diǎn)云的初步分割。
2.1 高程梯度定義
高程梯度可以用來反映點(diǎn)云局部高程變化的快慢,可區(qū)分立面點(diǎn)云和水平面點(diǎn)云。各點(diǎn)在局部的高程變化信息可用于區(qū)分道路和路坎。目前點(diǎn)云梯度并沒有明確的定義[10],大多數(shù)點(diǎn)云梯度計(jì)算是投影到二維平面進(jìn)行梯度計(jì)算,如Yang等[11]、Huang等[12]、Xia等[13]按各點(diǎn)值在坐標(biāo)軸方向變化的最大值來分析變量變化的特征,Xu等[10]則是將二維Robert算子的定義從二維像素拓展到三維格網(wǎng)求梯度,直接將基于像素的圖像處理方法使用于基于格網(wǎng)的三維點(diǎn)云計(jì)算。本文采用圖像梯度及數(shù)學(xué)中函數(shù)梯度的定義和思想,對(duì)三維離散點(diǎn)直接計(jì)算梯度大小。
(1) 梯度定義中將點(diǎn)值變化量分別在x、y、z軸投影,得到3個(gè)方向的局部投影變化量Fx、Fy、Fz,再將投影變化量除以變化“距離”,得到局部投影變化率為
(2)
(2) 對(duì)所有鄰域點(diǎn)的投影變化率求和為
(3)
(3) 將結(jié)果除以點(diǎn)數(shù),以得到投影變化率的平均值,得到梯度大小為
(4)
2.2 局部特征約束
依照本文對(duì)高程梯度大小的定義,在水平結(jié)構(gòu)中高程變化接近0,位于立面結(jié)構(gòu)的點(diǎn)云計(jì)算出的高程梯度值一般較大。結(jié)合實(shí)際經(jīng)驗(yàn),選取不同的梯度閾值按式(5)和式(6)將點(diǎn)云分割為兩類,從而區(qū)分立面點(diǎn)云和水平點(diǎn)云。
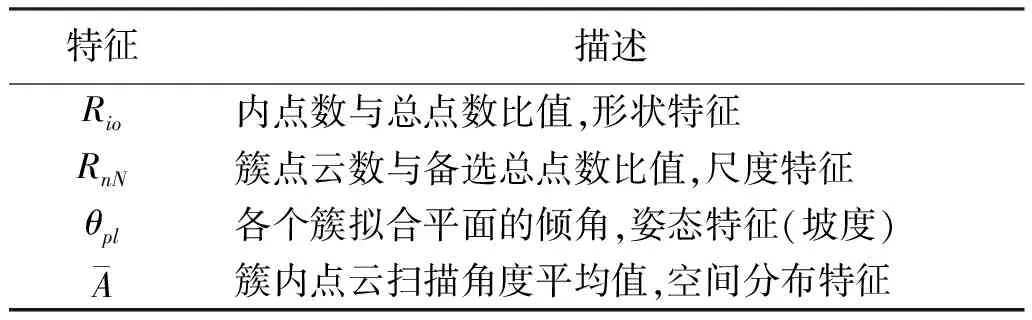
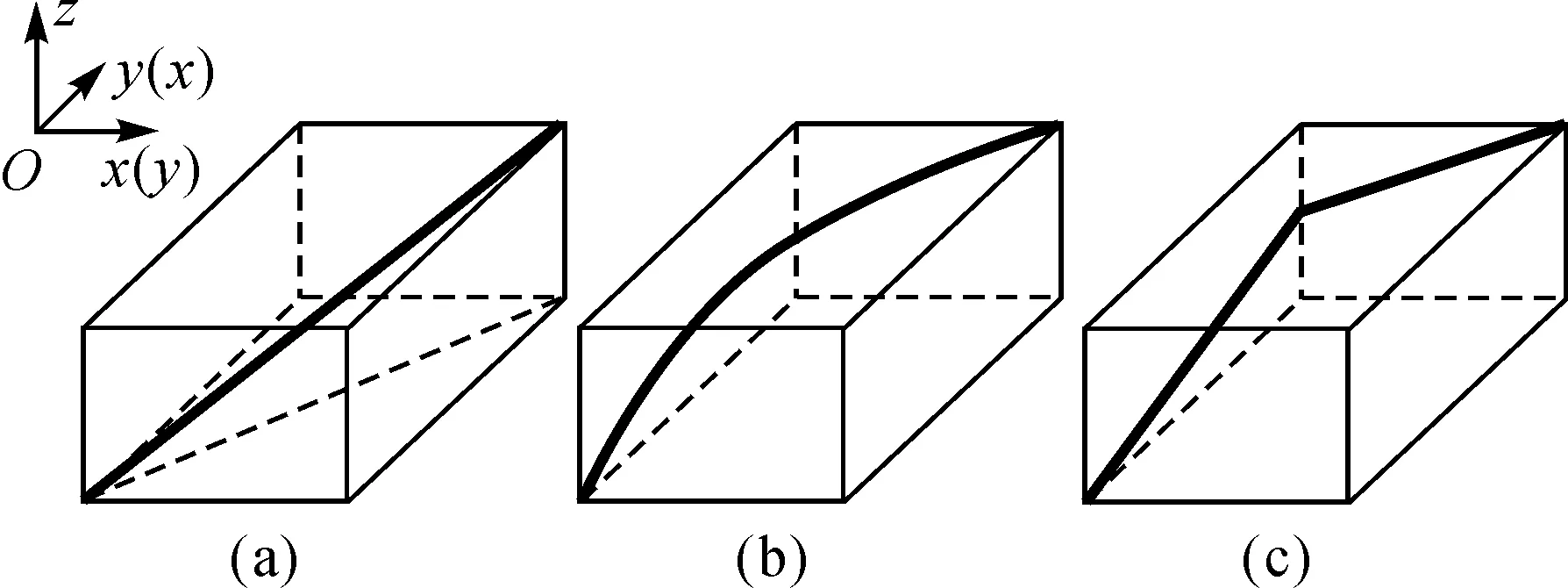
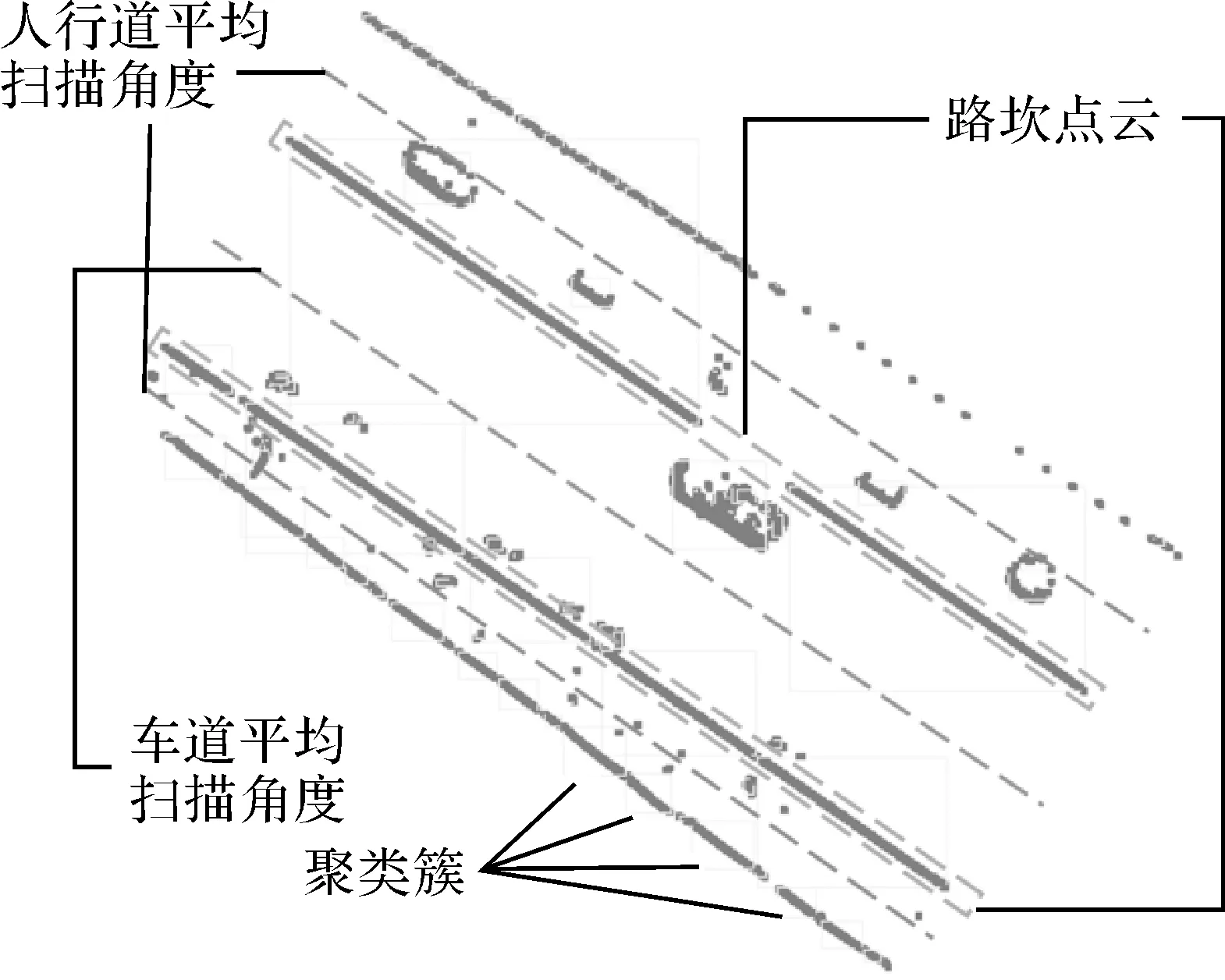
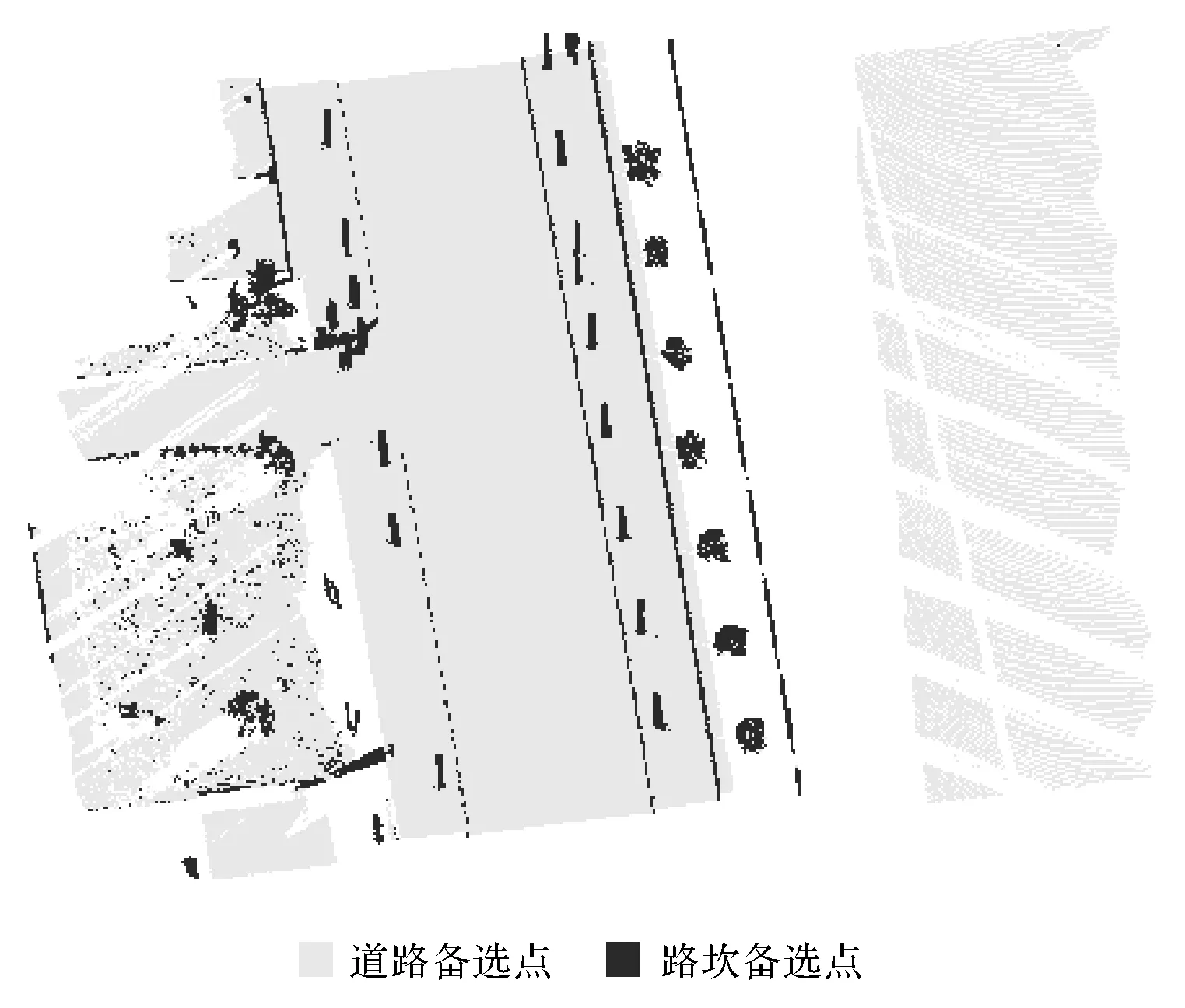
Sh,l={Pi|Pi∈SI,Hgra(Pi) (5) Sf,l={Pi|Pi∈SI,Hgra(Pi)>Gv} (6) 式中,Sh,l為近似的局部水平點(diǎn)集;Sf,l為近似的局部立面點(diǎn)集;Hgra(Pi)為點(diǎn)Pi的高程梯度。 通過局部特征約束分割后的點(diǎn)云仍包含較多的非目標(biāo)點(diǎn)云,而它與目標(biāo)點(diǎn)云在局部特征上表現(xiàn)相似,難以在單個(gè)點(diǎn)或局部點(diǎn)云中定義其他有效的特征進(jìn)行分類。 由于經(jīng)過局部特征約束后得到的道路備選點(diǎn)和路坎備選點(diǎn)在歐氏空間內(nèi)成“塊”狀分布,因此進(jìn)一步分割可先采用聚類算法在歐氏空間將點(diǎn)云分割成“簇”,并按其幾何特征提取包含目標(biāo)點(diǎn)云的簇[14]。 利用八叉樹對(duì)點(diǎn)云劃分格網(wǎng)可以建立點(diǎn)之間的拓?fù)潢P(guān)系[15],因此本文聚類前需先將點(diǎn)云劃分格網(wǎng)。本文借鑒二維圖像處理中基于遍歷標(biāo)記法的連通域分割算法,將二維像素標(biāo)記拓展到三維格網(wǎng)標(biāo)記,將4方向或8方向鄰域拓展到26方向鄰域。實(shí)現(xiàn)方法如下: (1) 按特定尺度將待處理的已經(jīng)過局部特征約束標(biāo)記屬性(道路屬性、路坎屬性)的點(diǎn)云數(shù)據(jù)劃分格網(wǎng),采用三元組編號(hào),如第i列第j行第k層的格網(wǎng)編號(hào)為(i,j,k),初始標(biāo)記Label(i,j,k)=0。 (2) 按一定順序遍歷格網(wǎng),格網(wǎng)(i,j,k)包含點(diǎn)云時(shí),首先判斷該格網(wǎng)26個(gè)相鄰格網(wǎng)的標(biāo)記類型:如果該格網(wǎng)鄰域內(nèi)不包含任何類別的格網(wǎng),則將該格網(wǎng)標(biāo)記Label(i,j,k)加1,表示增加了一個(gè)臨時(shí)聚類類別;如果該格網(wǎng)鄰域內(nèi)存在Label值不為零的格網(wǎng),鄰域內(nèi)Label集合中超過兩個(gè)元素,則將該格網(wǎng)Label值取為鄰域內(nèi)最小的非零Label值,即Label(i,j,k)=min{鄰域內(nèi)非零Label值},且將此時(shí)該鄰域的所有非零Label值加入到新的集合類型I={鄰域內(nèi)非零Label值}作為一個(gè)新的類型子集。 (3) 遍歷所有格網(wǎng),將所有合并的Label集合I中的元素全部賦值為集合中最小的Label值,即Label∈I=min(I)。 該聚類算法需要首先將點(diǎn)云劃分格網(wǎng),而格網(wǎng)的大小(尺度)會(huì)影響鄰接關(guān)系和類別的判斷,點(diǎn)云所屬的格網(wǎng)及其之間的鄰接關(guān)系也會(huì)發(fā)生變化,聚類所得到的類別也就不同。一般而言,使用越小的尺度聚類,分割程度越大,得到的簇越多,同一目標(biāo)被分割成不同簇的可能性越大(過分割),同時(shí)消耗的時(shí)間也就越多;反之,尺度越大則不同目標(biāo)被分割成同一個(gè)簇的可能性越大(欠分割),耗時(shí)越少。 綜上選擇合適的尺度進(jìn)行聚類是實(shí)現(xiàn)聚類分類的關(guān)鍵,可以通過對(duì)樣本數(shù)據(jù)(包括了包含彎曲道路片段的點(diǎn)云、包含直線道路片段的點(diǎn)云、包含轉(zhuǎn)角道路片段的點(diǎn)云及道路結(jié)構(gòu)特征不同的點(diǎn)云)在不同尺度下聚類進(jìn)行分割情況統(tǒng)計(jì)獲得較好的尺度,用分割比Rseg表示,當(dāng)Rseg<1時(shí),表示欠分割,當(dāng)Rseg>1時(shí)表示過分割。 (7) 式中,N為目標(biāo)的理論結(jié)構(gòu)個(gè)數(shù)(如車道N一般為1,人行道和路坎N一般大于2);ni為理論個(gè)數(shù)為1時(shí)(單個(gè)結(jié)構(gòu))對(duì)應(yīng)實(shí)際分割得到的個(gè)數(shù),當(dāng)簇中包含有非目標(biāo)點(diǎn)云塊時(shí)(即聚類塊中有明顯的非路坎或非道路的點(diǎn)集,且這些點(diǎn)在采用更小的尺度時(shí)有較大可能被分割成不同的類別),ni=0。 該統(tǒng)計(jì)結(jié)果僅作為尺度選取的參考,在實(shí)際處理中由于道路結(jié)構(gòu)的不同、選取道路片段的長度不同,上述值也會(huì)有所差異。 城市結(jié)構(gòu)化道路中行車道與人行道類似,具有如下特點(diǎn):①一般為平面狀;②路面坡度一般小于10%,坡面較為平緩,沿水平方向延伸;③道路表面較為平坦,高程變化點(diǎn)少;④路面面積較大,包含的點(diǎn)較多;⑤主干道路包含掃描角度為零的點(diǎn)云。路坎作為連接路面的分割面,與道路類存在拓?fù)潢P(guān)系,同時(shí)路坎具有如下特點(diǎn):①形狀為細(xì)長狀;②延伸方向接近水平,且沿該方向高程變化平緩;③平均高程與道路相差較小;④路坎與道路鄰接,且位于人行道和車道之間;⑤路坎與掃描軌跡線形狀相似(切線方向變化規(guī)律一致)。基于上述特點(diǎn),本文將對(duì)道路備選點(diǎn)提取形狀、尺度、姿態(tài)和位置特征,對(duì)路坎備選點(diǎn)提取形狀和姿態(tài)、空間分布特征,通過特征約束實(shí)現(xiàn)車道、人行道和路坎點(diǎn)云的提取。 試驗(yàn)表明,在小尺度下,車道點(diǎn)云一般處于連通域,不會(huì)被標(biāo)記為多個(gè)類別,人行道點(diǎn)云在該尺度下位于不同的連通域,易被標(biāo)記為多個(gè)類別;而在大尺度情況下,人行道則易與車道被標(biāo)記為同一類別。據(jù)此,得到車道點(diǎn)集Sdw和人行道點(diǎn)集Ssw為 (8) 式中,Sdw,sml為小尺度下標(biāo)記的車道點(diǎn)集;Ssw,sml為小尺度下標(biāo)記的人行道點(diǎn)集;Srd,lg為大尺度下標(biāo)記的道路點(diǎn)集。 由于被標(biāo)記為同一個(gè)類別的所有格網(wǎng)一定是處于連通域的,因此,為了使得大尺度下人行道和車道被標(biāo)記為同一類,應(yīng)該有至少一組相鄰的格網(wǎng)同時(shí)包含車道點(diǎn)和人行道路點(diǎn)云。 為了更好地提取簇的幾何特征,采用隨機(jī)采樣一致性算法(random sample consensus,RANSAC)對(duì)平面擬合的思想,利用內(nèi)點(diǎn)和外點(diǎn)判斷一個(gè)簇的平面性,從而避免最小二乘法擬合平面時(shí)非目標(biāo)點(diǎn)的影響。具體計(jì)算中采用梅森旋轉(zhuǎn)算法采樣若干點(diǎn)(如1000個(gè)),首先利用最小二乘法擬合平面,將距離該平面小于閾值(考慮道路面有弧度,本文取0.02 m)的點(diǎn)記為內(nèi)點(diǎn),其余記為外點(diǎn),統(tǒng)計(jì)迭代30次內(nèi)最大的內(nèi)點(diǎn)數(shù)作為該簇最終的內(nèi)點(diǎn)數(shù),用于定義簇的形狀特征。 按照道路的特點(diǎn),對(duì)聚類分割得到的每個(gè)簇提取形狀、尺度、姿態(tài)和位置特征見表1。 表1 道路簇表征參數(shù) 路坎的形狀、姿態(tài)特征可以使用最小外包盒(minimum bounding box,MBB)衡量,最小外包盒的各邊平行于坐標(biāo)軸,圖1為幾種簡(jiǎn)化的路坎結(jié)構(gòu)。 圖1 不同路坎結(jié)構(gòu)及最小外包盒示意圖 定義路坎的形狀和姿態(tài)描述特征量為 (9) 式中,X、Y、Z為簇內(nèi)點(diǎn)坐標(biāo)x、y、z值的最大差值,即最小外包盒的長、寬、高。 由于路坎(片段)在近似水平方向延伸,因此Sh值越小越有可能是路坎,限制Sh的最大閾值,可以去除汽車、樹木、行人等呈塊狀結(jié)構(gòu)的簇和垂直結(jié)構(gòu)的簇。 除此之外,為了去除一些與路坎在幾何形態(tài)上類似的簇,定義特征量An以描述簇的空間分布特征。 (10) 式中,Ai為簇內(nèi)點(diǎn)Pi的掃描角度;N為簇內(nèi)點(diǎn)的數(shù)量。 在結(jié)構(gòu)化道路中,路坎在空間分布上的特征應(yīng)該是位于車道和人行道之間,平均掃描角度一般情況下應(yīng)在兩側(cè)人行道平均掃描角度所構(gòu)成的區(qū)間內(nèi),如圖2所示。 圖2 基于平均掃描角度的簇標(biāo)記 路坎簇標(biāo)記和提取公式為 (11) 試驗(yàn)數(shù)據(jù)由車載激光掃描系統(tǒng)在武漢大學(xué)掃描獲取。數(shù)據(jù)采集共包含約2.1×109個(gè)點(diǎn),試驗(yàn)數(shù)據(jù)為車載激光掃描在WGS-84坐標(biāo)系下的原始數(shù)據(jù)。 為驗(yàn)證本文算法的有效性,在分割的道路片段中選取數(shù)據(jù)測(cè)試。原始數(shù)據(jù)包含大量散亂樹葉及行人、汽車等非目標(biāo)點(diǎn)云數(shù)據(jù),點(diǎn)云分布十分密集。對(duì)數(shù)據(jù)按照本文的方法進(jìn)行測(cè)試。其中局部特征約束的結(jié)果如圖3所示,聚類標(biāo)記的結(jié)果如圖4所示。 圖3 局部特征約束目標(biāo)提取及標(biāo)記結(jié)果 由圖3可見,濾除了大量稀疏點(diǎn),已基本不包含道路上方的枝葉、距離道路較遠(yuǎn)的散亂獨(dú)立地物和一些離散的點(diǎn)云數(shù)據(jù),但仍存在較多的樹干、行人及非道路地面點(diǎn),該階段標(biāo)記的道路備選點(diǎn)云多為在局部水平分布的點(diǎn)云,而標(biāo)記的路坎備選點(diǎn)云多為局部垂直分布的立面點(diǎn)云。 從最終的提取結(jié)果(如圖4所示)來看,非目標(biāo)點(diǎn)云已經(jīng)濾除,而且提取的目標(biāo)點(diǎn)云保留較為完整。 圖4 目標(biāo)提取及標(biāo)記結(jié)果 本文提供了一種基于局部特征和多尺度聚類的道路要素點(diǎn)云提取的完整方法。首先對(duì)點(diǎn)云提取局部特征和特征約束分割,并逐層計(jì)算特征值和濾除點(diǎn),從而在點(diǎn)層次標(biāo)記出道路備選點(diǎn)和路坎備選點(diǎn);然后采用一種基于遍歷標(biāo)記法的連通域聚類算法,分別將道路備選點(diǎn)和路坎備選點(diǎn)分割成不同的簇,在不同尺度上對(duì)每個(gè)簇提取對(duì)于識(shí)別目標(biāo)(人行道、車道、路坎)有效的描述其形狀、尺度、姿態(tài)等特點(diǎn)的特征量,利用RANSAC算法提取簇的平面特性,結(jié)合不同目標(biāo)的幾何特征,在簇層次標(biāo)記出車道簇、人行道簇和路坎簇。結(jié)果表明,該方法效果較好,提取的車道點(diǎn)云、人行道點(diǎn)云和路坎點(diǎn)云具有較高的準(zhǔn)確率和召回率,可以用于車載激光掃描數(shù)據(jù)的結(jié)構(gòu)化道路目標(biāo)的識(shí)別,并為無人駕駛等應(yīng)用提供服務(wù)。3 多尺度聚類點(diǎn)云提取方法
3.1 基于26方向鄰域和遍歷標(biāo)記法的連通域聚類分割方法
3.2 聚類尺度的確定
4 結(jié)構(gòu)化道路的道路簇和路坎簇提取
4.1 多尺度聚類的道路簇提取
4.2 路坎簇提取

5 實(shí)例驗(yàn)算

6 結(jié) 語
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
- 測(cè)繪通報(bào)的其它文章
- 利用教師科研項(xiàng)目培養(yǎng)測(cè)繪專業(yè)本科生的創(chuàng)新能力
- 利用Alpha-shape算法進(jìn)行樹冠三維模型構(gòu)建
- 云環(huán)境下地籍?dāng)?shù)據(jù)高效并行化的拓?fù)錂z查
- 綜合協(xié)調(diào)交叉效率區(qū)域可持續(xù)發(fā)展評(píng)價(jià)模型與動(dòng)態(tài)評(píng)價(jià)
- 北斗全球試驗(yàn)衛(wèi)星觀測(cè)數(shù)據(jù)質(zhì)量分析
- 山東省近10年植被覆蓋度變化與氣候因子相關(guān)性分析