漁網(wǎng)機張力控制技術(shù)研究*
2019-01-02 02:20:58顧寄南唐仕喜
機電工程 2018年12期
關(guān)鍵詞:系統(tǒng)
王 飛,顧寄南,唐仕喜
(江蘇大學(xué) 制造業(yè)信息化研究中心,江蘇 鎮(zhèn)江 212013)
0 引 言
漁網(wǎng)機網(wǎng)片由緯線與經(jīng)線編織而成,緯線與經(jīng)線的張力控制對于漁網(wǎng)機張力控制很重要。對于經(jīng)線而言,當(dāng)卷繞過程中張力過小,網(wǎng)片會時緊時松,并且網(wǎng)片的結(jié)的大小、位置以及網(wǎng)目大小也會參差不齊。若卷繞過程中張力過大,會使得經(jīng)線繞著卷輥產(chǎn)生相對滑動,影響線的表面質(zhì)量甚至導(dǎo)致網(wǎng)線拉斷。
張力控制系統(tǒng)本身具有不確定性,經(jīng)線纏繞時具有一定的彈性,卷繞半徑、卷入速度隨時間不斷變化,張力設(shè)定值變化等都使得系統(tǒng)數(shù)學(xué)模型發(fā)生很大變化[1-3]。同時系統(tǒng)受隨機干擾因素的影響,如纏繞過程中設(shè)備抖動、電機力矩輸出不均性、伺服電機的電信號干擾等。系統(tǒng)還會受到多種非線性因素的影響,如軸輥與軸承之間的靜摩擦。由于非線性因素的存在,張力控制系統(tǒng)的數(shù)學(xué)模型與實際偏差較大。
因張力控制系統(tǒng)受多種因素干擾,導(dǎo)致傳統(tǒng)PID控制精度難以達到要求。而模糊理論控制適用于非線性[4]、有時變和滯后特點的控制系統(tǒng)。
本文將采用模糊PID控制方法,對張力控制系統(tǒng)的多變量、非線性、時滯性等進行研究,對漁網(wǎng)機經(jīng)線張力數(shù)學(xué)模型以及張力波動的主要影響因素進行分析。
1 張力控制模型
張力控制目的是確保經(jīng)線卷繞張力恒定。采用傳統(tǒng)PID控制方法,設(shè)定一組固定P,I,D參數(shù),由于這些參數(shù)同時具備動態(tài)和靜態(tài)屬性,在收卷過程中,隨著半徑增加,其慣性也在增加,并且由于切換速度轉(zhuǎn)換技術(shù)不同,傳統(tǒng)的PID控制系統(tǒng)往往無法達到最佳效果[5]。
在漁網(wǎng)機張力控制系統(tǒng)中,收卷部分半徑不斷增加,卷徑變化是個明顯的擾動量。經(jīng)線與輥輪之間為滾動摩擦,不存在滑動摩擦。主電機輥速度保持不變,其兩側(cè)收卷部分與放卷部分張力不相等,本研究對張力收卷控制部分進行分析。收卷部分的調(diào)節(jié)輥是張力的反饋環(huán)節(jié),經(jīng)線張力發(fā)生波動,調(diào)節(jié)電機輸出力矩不變,張力的波動帶動擺桿位置發(fā)生變化后調(diào)節(jié)電機反饋力矩發(fā)生改變,并將該反饋信號傳到PLC中。PLC將反饋力矩與設(shè)定值比較并結(jié)合卷徑的變化得出計算結(jié)果控制收卷電機轉(zhuǎn)速,實時動態(tài)調(diào)整收卷輥轉(zhuǎn)速保證張力的穩(wěn)定。
張力控制結(jié)構(gòu)如圖1所示。
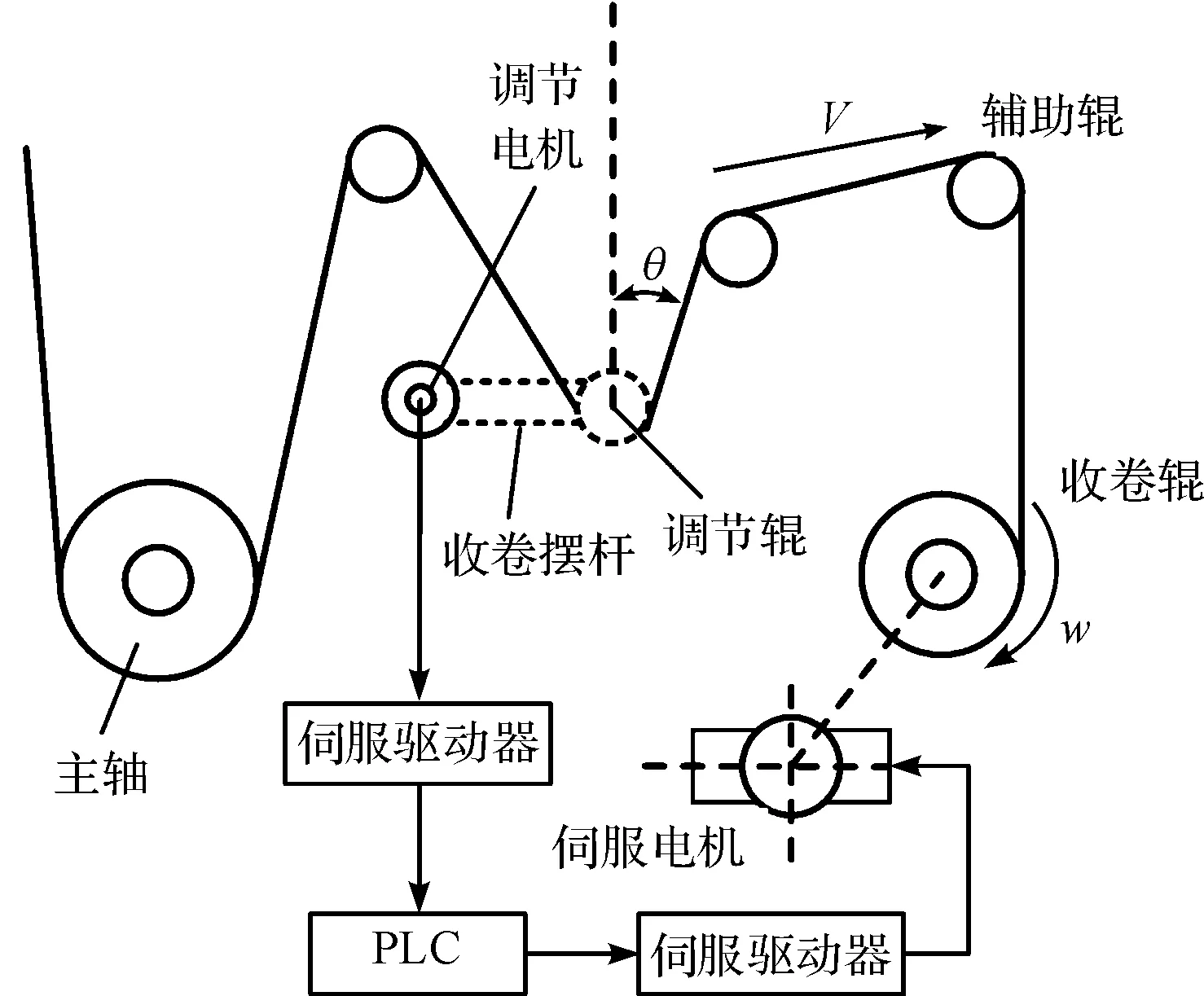
圖1 張力控制結(jié)構(gòu)
以收卷輥為研究對象,根據(jù)力矩平衡原理,得到經(jīng)線上的張力、收卷電機轉(zhuǎn)矩、阻力轉(zhuǎn)矩、摩擦力矩之間的關(guān)系如下:
(1)
張力通過調(diào)節(jié)輥反饋到調(diào)節(jié)電機轉(zhuǎn)矩關(guān)系為:
(2)
式中:T—經(jīng)線張力;R—實時卷繞半徑;Mm—收卷電機轉(zhuǎn)矩;Me—摩擦力矩;MB—調(diào)節(jié)電機的力矩;Mt—阻力轉(zhuǎn)矩;J—線卷的實時轉(zhuǎn)動慣量;w—角速度。
根據(jù)方程,卷徑R、線卷轉(zhuǎn)動慣量J以及角速度w都是時間的函數(shù),因此該系統(tǒng)是多變量的時變系統(tǒng)。
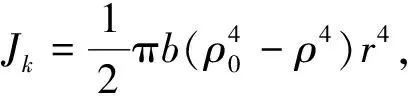
其中,J由卷軸及網(wǎng)線轉(zhuǎn)動慣量組成:
(3)
式中:JR—卷網(wǎng)線的轉(zhuǎn)動慣量;Jr—卷軸的轉(zhuǎn)動慣量;ρ—網(wǎng)線材料密度;b—線卷寬度;ρ0—卷軸材料密度;R—實時線卷半徑;r—實時芯軸半徑。
(4)
實際生產(chǎn)過程中,隨著收卷的不斷進行,收卷半徑不斷增大,收卷電機根據(jù)調(diào)節(jié)電機轉(zhuǎn)矩不斷調(diào)整收卷速度v,收卷速度v為非線性變化。角速度w關(guān)系為:
(5)
其中:
(6)
假設(shè)單位時間內(nèi)卷側(cè)面積的變化為ds,h為網(wǎng)線厚度,且厚度很小,則:
ds=hv·dt=2πR·dR
(7)
(8)
該系統(tǒng)中摩擦力很小,為了簡化模型將其忽略不計,將公式(3~8)代入到(1)中得到:
(9)
通過上式可以看出:在收卷部分在線速度v、收卷電機轉(zhuǎn)矩Mm、阻力矩Mt保持不變的情況下,卷繞張力會隨著卷徑R的不斷變化而產(chǎn)生波動,卷繞半徑以及收卷轉(zhuǎn)速成為影響張力控制主要因素,實際工作中還存在其他因素影響。由于系統(tǒng)參數(shù)具有不確定性,卷繞半徑通過公式計算得到,本身存在一定誤差[6]。采用傳統(tǒng)PID控制方法較難直接通過張力模型來實現(xiàn)對張力的控制。
將常規(guī)PID與模糊推理進行結(jié)合,利用模糊邏輯推理實現(xiàn)PID控制器參數(shù)的在線整定,可以有效實現(xiàn)對張力的穩(wěn)定控制[7-8]。
2 模糊PID控制
2.1 張力系統(tǒng)傳遞函數(shù)
本研究以收卷輥部位的伺服電機為執(zhí)行元件,調(diào)節(jié)電機的反饋力矩通過轉(zhuǎn)換得到張力并反饋到PLC中,PLC根據(jù)計算結(jié)果控制收卷伺服電機轉(zhuǎn)速,維持經(jīng)線張力值不變。在不考慮隨機干擾的影響時,系統(tǒng)的傳遞函數(shù)結(jié)構(gòu)如圖2所示。
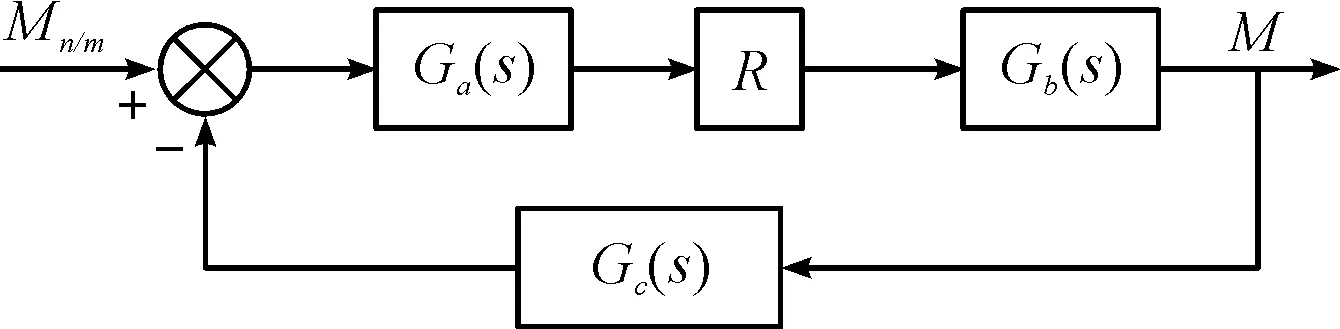
圖2 模糊PID控制結(jié)構(gòu)Ga(s)—收卷伺服電機的傳遞函數(shù),可簡化為一個比例環(huán)節(jié)和一個慣性環(huán)節(jié);R—卷繞半徑;Gb(s)—擺桿傳遞函數(shù);Gc(s)—調(diào)節(jié)電機根據(jù)擺桿位置轉(zhuǎn)成反饋力矩大小,可看成比例環(huán)節(jié)。
在實驗條件下,取卷繞半徑0.05 m,根據(jù)兩點法所測系統(tǒng)的傳遞函數(shù)為:
(10)
2.2 隸屬度函數(shù)
模糊控制器的兩個輸入為卷繞張力的偏差E與偏差變化率EC,而輸出為PID控制器的3個參數(shù):kP、kI、kD的變化量[9]。系統(tǒng)實現(xiàn)自調(diào)整PID參數(shù)的計算公式為:
kP=kP0+ΔkP
(11)
kI=kI0+ΔkI
(12)
kD=kD0+ΔkD
(13)
式中:kP0,kI0,kD0—P、I、D的初始值;ΔkP,ΔkI,ΔkD—模糊控制器的輸出,kP、kI、kD為最終控制輸出參數(shù)。
偏差E以及偏差變化率EC作為本研究的模糊控制系統(tǒng)的輸入語言變量。將其離散化為7個等級,分別為負大、負中、負小、零、正小、正中、正大,簡寫為{NB,NM,NS,ZO,PS,PM,PB},論域為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};ΔkP,ΔkI,ΔkD的論域為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊子集為{NB,NM,NS,ZO,PS,PM,PB}[10]。
常用隸屬度函數(shù)主要有:單值型、三角形、高斯型等。單值型的隸屬度函數(shù)無法解決輸入變量里存在的噪聲信號問題,而高斯型隸屬度函數(shù)計算較為復(fù)雜。本研究選擇三角形隸屬度函數(shù),不僅可以減少計算量,也可以克服輸入變量中的噪聲信號[11]。偏差E、偏差變化率EC和輸出變量ΔKp,ΔKi,ΔKd均選擇三角形隸屬度函數(shù)。
以E的隸屬度函數(shù)為例,如圖3所示。
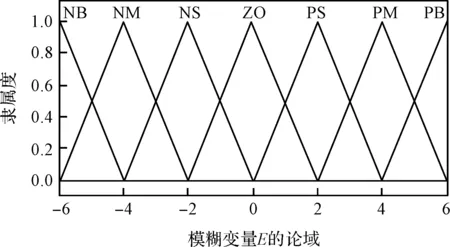
圖3 輸入變量E的隸屬度函數(shù)
2.3 模糊PID控制與規(guī)則表
根據(jù)工程設(shè)計知識和工程師操作經(jīng)驗,建立對漁網(wǎng)機控制器的調(diào)節(jié)規(guī)則:
(1)收卷開始階段,整個設(shè)備的震動較大,張力的波動也較大,因此張力的偏差|E|較大,此時應(yīng)當(dāng)適當(dāng)減少ΔkP、ΔkI,同時增大ΔkD,避免出現(xiàn)張力輸出的積分飽和與超調(diào)現(xiàn)象;
(2)系統(tǒng)趨向穩(wěn)定運行時,張力波動較小,|E|接近于中等值,此時應(yīng)適當(dāng)增加ΔkP、ΔkI,同時ΔkD取中等偏小值,以提高系統(tǒng)的穩(wěn)定性與響應(yīng)速度;
(3)系統(tǒng)穩(wěn)定運行時,張力的波動幾乎為零,此時應(yīng)減小ΔkP,增大ΔkI,以減小靜態(tài)誤差。
輸出變量控制規(guī)則表如表1所示。
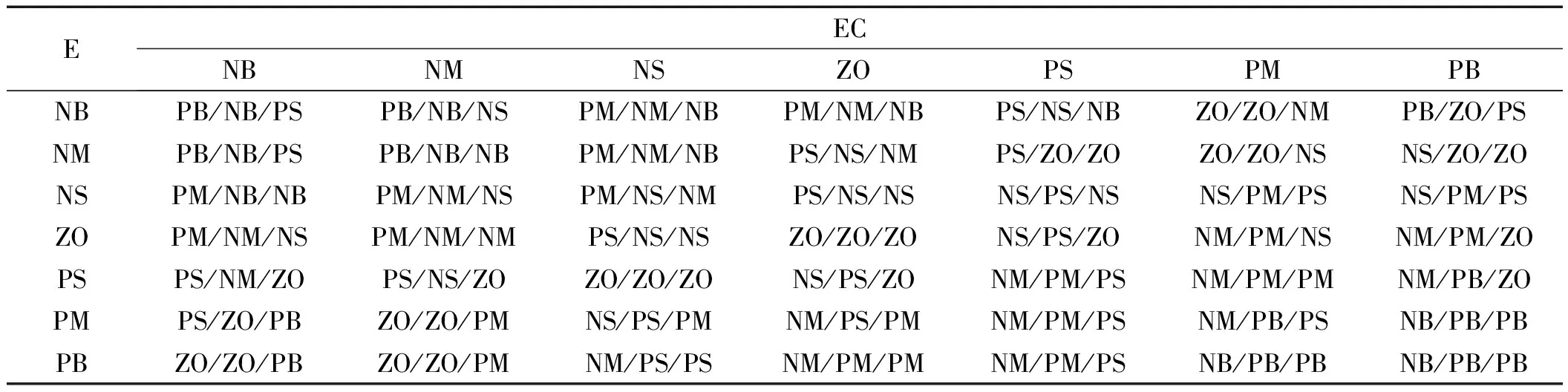
表1 ΔkP,ΔkI,ΔkD模糊規(guī)則表
3 仿真分析及實驗
3.1 系統(tǒng)仿真模型的建立
本研究利用Matlab軟件中Simulink功能模塊,以及隸屬度函數(shù)和模糊規(guī)則表,將已經(jīng)建立好的模糊規(guī)則表嵌入到模糊控制器中,執(zhí)行對象為收卷部分的伺服電機。
系統(tǒng)的輸入信號為階躍信號,將模糊PID的計算結(jié)果傳到伺服系統(tǒng),最后觀察Scope的輸出波形圖。利用Matlab/Simulink功能模塊分別建立收卷恒張力常規(guī)PID控制器的仿真模型,如圖4所示。
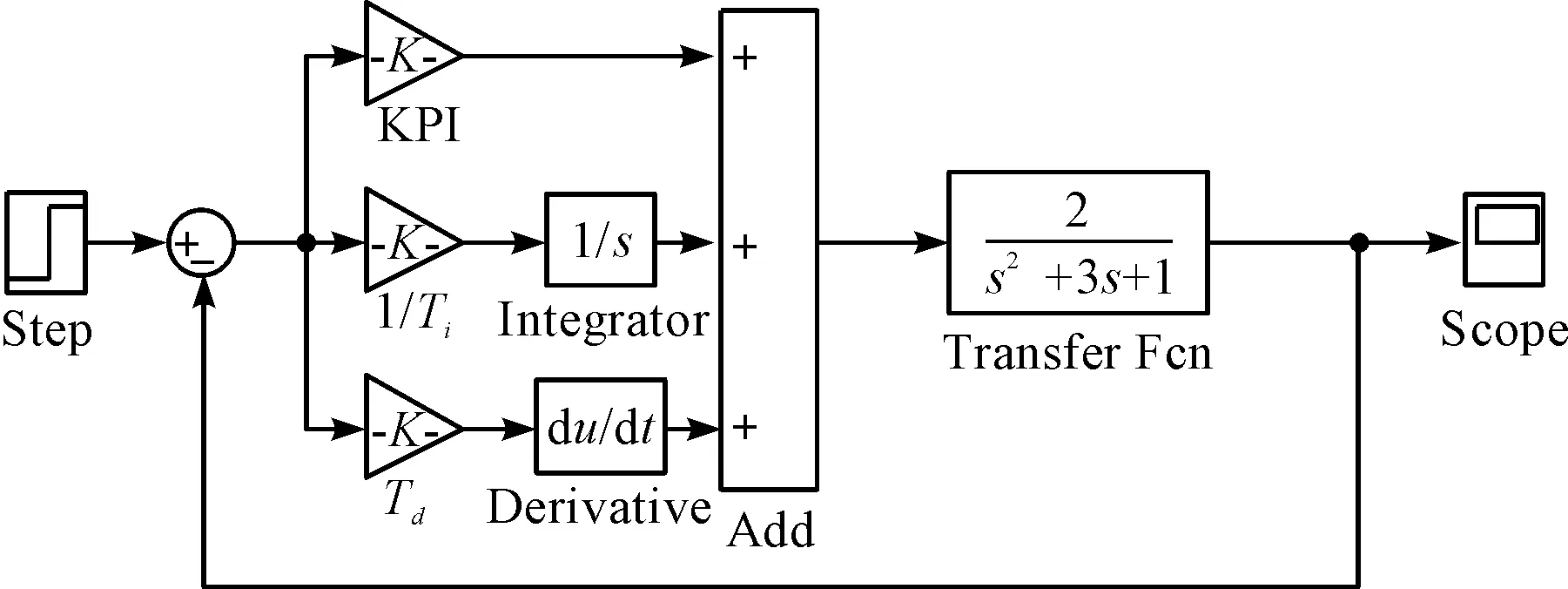
圖4 傳統(tǒng)PID仿真模型
模糊自適應(yīng)PID控制器仿真模型如圖5所示。
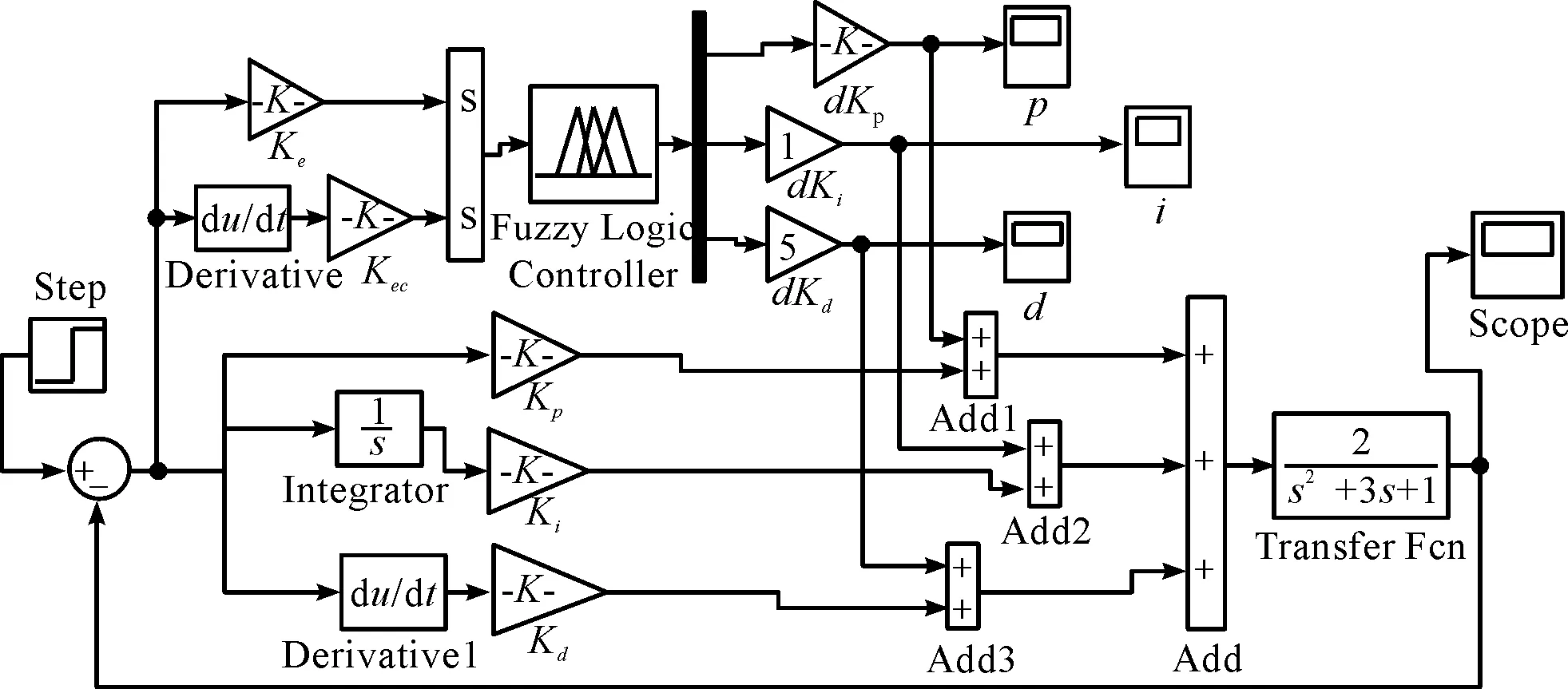
圖5 模糊PID仿真模型
3.2 仿真及結(jié)果分析
常規(guī)PID與模糊PID控制系統(tǒng)的輸出響應(yīng)曲線如圖6所示。
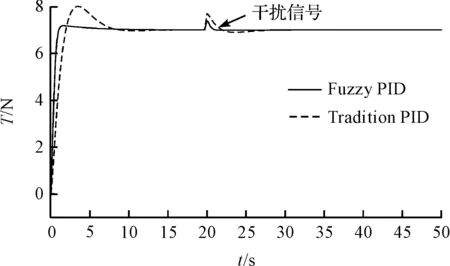
圖6 控制系統(tǒng)抗干擾響應(yīng)曲線
其中,時間為20 s處添加幅值為2的階躍干擾信號。從圖6可以看出:實際張力值圍繞設(shè)定值上下波動,直至達到平衡狀態(tài)。
通過實驗結(jié)果分析可得到兩種控制器對張力控制性能,如表2所示。

表2 兩種控制算法控制對比
由表2可以看出:采用模糊PID算法,系統(tǒng)響應(yīng)速度更快、系統(tǒng)超調(diào)更小,系統(tǒng)受到隨機干擾后恢復(fù)速度更快。由于材料、系統(tǒng)參數(shù)設(shè)置的變化,張力系統(tǒng)控制對象都會產(chǎn)生變化,在系統(tǒng)時間為20 s時將張力由7 N改為9 N,以及將傳遞函數(shù)添加滯后環(huán)節(jié)2e-0.5/(S2+3S+1)后分別進行仿真,結(jié)果如圖(7,8)所示。
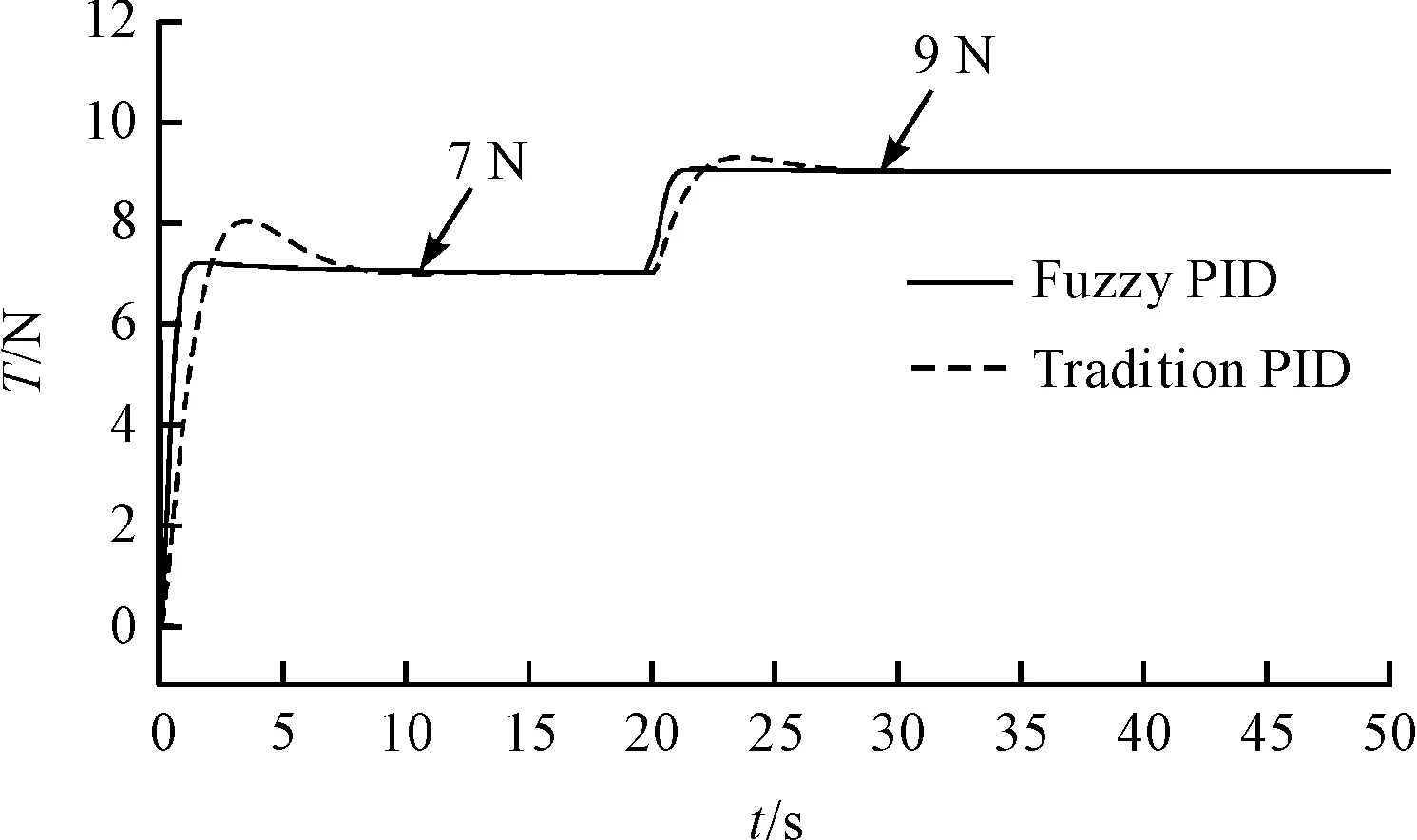
圖7 控制系統(tǒng)參數(shù)變化響應(yīng)曲線
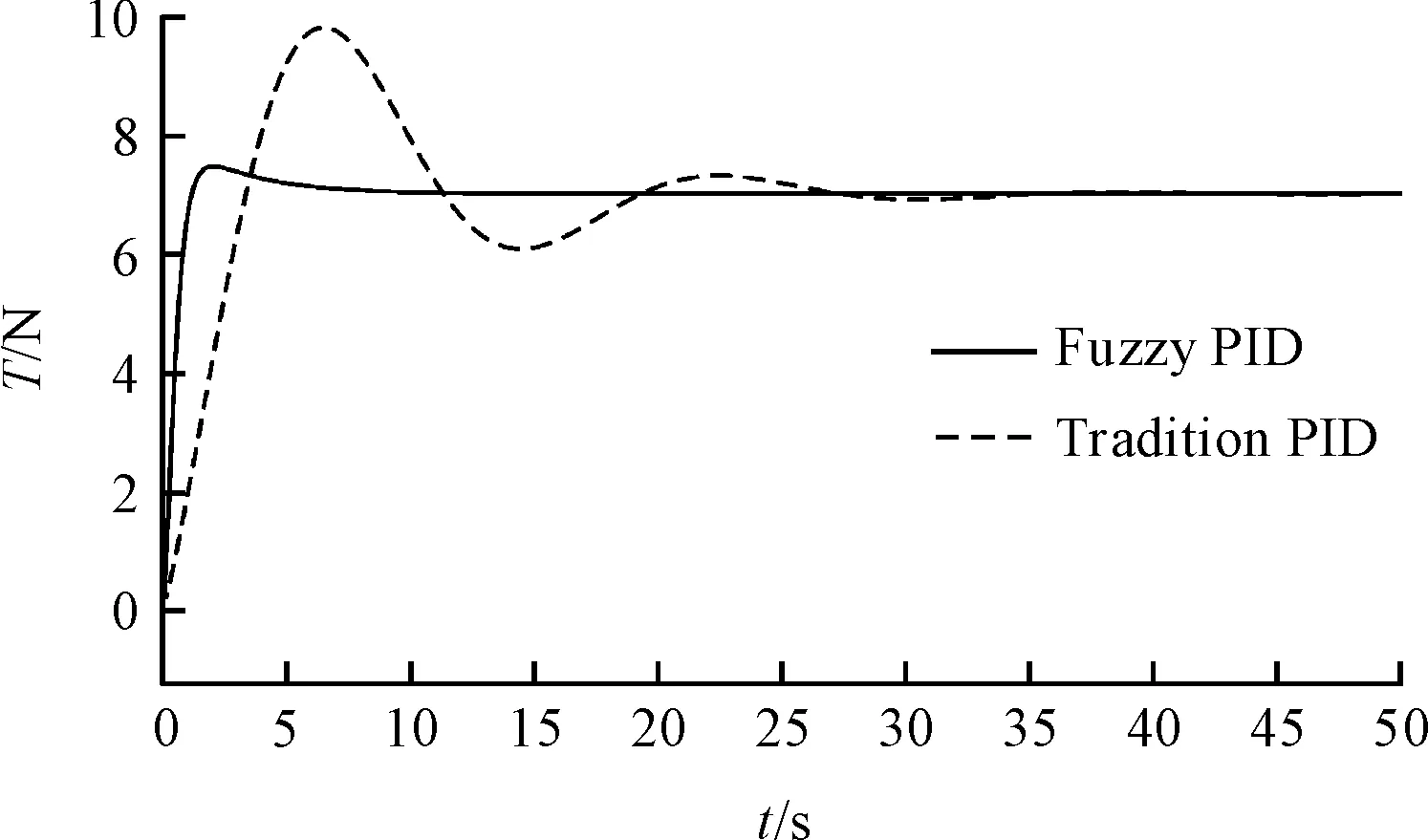
圖8 添加滯后環(huán)節(jié)控制系統(tǒng)響應(yīng)曲線
從圖7可以看出:系統(tǒng)穩(wěn)定運行過程中張力設(shè)定值更改后采用模糊PID算法控制系統(tǒng)恢復(fù)穩(wěn)定時間更短,更平穩(wěn)。
從圖8可以看出:添加延時環(huán)節(jié)對采用模糊PID控制系統(tǒng)影響較小,而常規(guī)PID系統(tǒng)震蕩明顯,超調(diào)較大。
綜上可以看出:采用模糊PID的控制系統(tǒng)響應(yīng)速度快,穩(wěn)態(tài)性較好,具有較強的魯棒性,在系統(tǒng)參數(shù)變化或系統(tǒng)受到干擾情況下,采用模糊PID的恢復(fù)速度更快。
3.3 試驗測試
本研究采用實驗室的收放卷平臺進行驗證。卷帶纏繞設(shè)備收卷部分控制結(jié)構(gòu)如圖9所示。
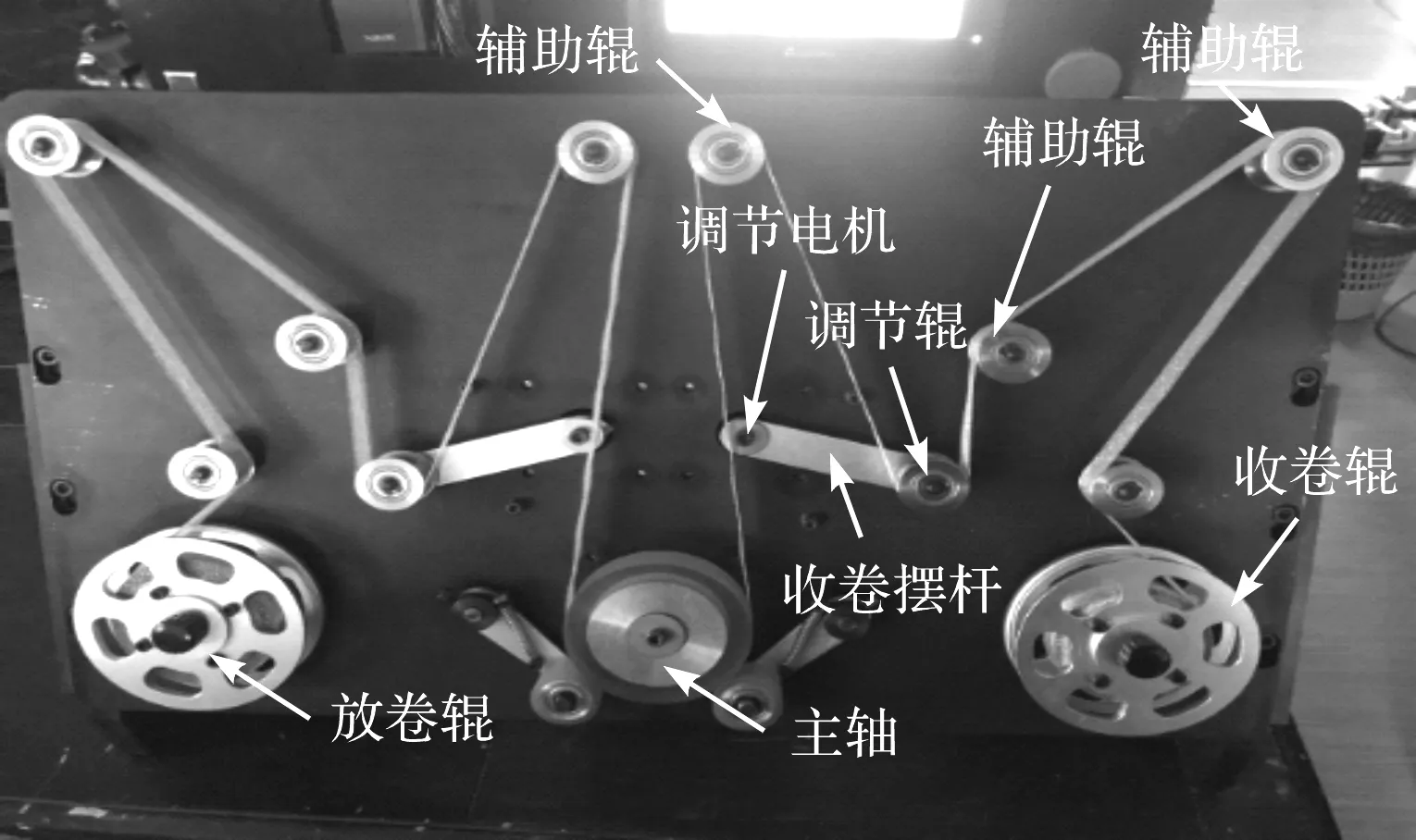
圖9 收放卷平臺結(jié)構(gòu)
收放卷平臺運行參數(shù)設(shè)置如表3所示。

表3 收放卷運行參數(shù)
系統(tǒng)穩(wěn)定后,張力變化情況如圖10所示。
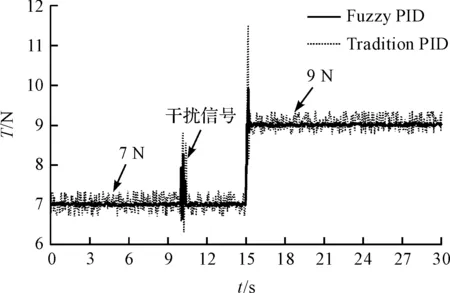
圖10 穩(wěn)態(tài)時段張力波動
圖10可以看出:常規(guī)PID控制波動明顯大于模糊PID控制。通過實驗結(jié)果分析可知:模糊PID張力控制中放卷張力設(shè)定為7 N時波動率約為3%,張力設(shè)為9 N后張力波動率約為2.8%,受到人為擾動后系統(tǒng)快速恢復(fù)穩(wěn)定。常規(guī)PID張力控制中放卷張力設(shè)為7 N時波動率約為10.2%,張力設(shè)定為9 N后張力波動率約為9.6%,受到擾動后系統(tǒng)快速恢復(fù)較慢,且由7 N切換到9 N過程中波動較大,過渡時間較長。由此表明,模糊PID可有效提高張力控制系統(tǒng)響應(yīng)速度與抗干擾性,在系統(tǒng)參數(shù)變化后仍然具有較強的適應(yīng)性,可有效實現(xiàn)漁網(wǎng)機經(jīng)線張力的穩(wěn)定控制。
4 結(jié)束語
針對漁網(wǎng)機張力的模糊PID控制,本文在常規(guī)PID控制器的基礎(chǔ)上引入模糊控制器,克服了傳統(tǒng)PID控制器參數(shù)不能自適應(yīng)調(diào)整的缺點。從仿真及實驗結(jié)果可以看出:模糊PID控制效果超調(diào)小、穩(wěn)定快,在受到擾動后可以快速回到穩(wěn)定狀態(tài),且張力波動范圍控制在了5%以內(nèi),能夠?qū)崿F(xiàn)經(jīng)線張力的穩(wěn)定控制。
本研究中涉及到了3根軸的運動,對多軸的同步性考慮不足,今后本研究將通過EtherCAT現(xiàn)場總線控制方式來研究多軸的同步性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
