基于激光測距的公交停靠站規范監管系統
2018-12-27 05:52:12吳海金
電氣技術 2018年12期
陳 俊 吳海金
?
基于激光測距的公交停靠站規范監管系統
陳 俊 吳海金
(福州大學物理與信息工程學院,福州 350002)
針對公交停靠站規范問題,本文提出了一種基于激光測距的公交停靠站規范監管系統。系統包括上位機控制臺和下位機的測量監管設備兩部分。上位機控制臺通過無線通信網絡與下位機的測量設備進行數據通信,下位機的定點測量設備采用激光測距技術判斷公交是否規范停靠站,并將結果通過無線通信網絡傳送給車載監管設備以告知司機,并將相關信息上傳至上位機控制臺以實現監督和管控。試驗結果表明,系統檢測精度和測試效率高、操作簡便,能夠有效監管公交規范地停靠站,具有一定的實用價值。
激光測距;公交停靠站;監管系統;定點測量
近年來,我國城市交通擁堵問題日益嚴峻,優先發展公共交通已經成為社會各界的普遍共識[1]。而設置公交車專用通道和規范公交停靠站等措施是保障公共交通安全、高效的有效手段[2]。雖然目前國內許多一線與二線城市已經規范了公交停靠站標準,在每一個公交車站前都有一個規定的公交停靠站區域[3]。然而很多公交在實際停靠站過程中,沒有做到規范停靠站,時常出現亂停、隨停的情況[4],由于不確定公交車停靠站的具體位置,乘客們往往會追著公交跑,如果有多輛公交同時到達一個站點,有的公交可能直接在公交站尾就停車,這時乘客需要從公交站頭跑到公交站尾,這無疑增加了安全隱患[5]。此外,公交沒有定點停靠,可能會出現乘客錯過等待的公交車等問題,這些問題在一定程度上影響著公交系統的運行效率和道路服務水平[6]。
公交停靠站規范指的是識別和判斷公交在相關站點停靠時是否遵循相關規定停靠在指定的區域范圍內,規定的停靠站區域往往大小固定,且在定點停靠站位置有著明顯的標線[7]。目前,對于公交停靠站的規范問題,尚沒有一種有效的監管方案,除了一些政策上的相關規定支持外,幾乎沒有具體可實施的監管方案。因此,急需一種可靠的方案來解決以上的問題。
鑒于此,本文提出了基于激光測距的公交停靠站規范監管系統,以彌補當前尚未有公交規范停靠站監管方案的缺憾。本文提出的一個全新的規范監管方案,對促進城市公交服務規范的實施有重大 意義。
1 系統概述
本文針對公交停靠站規范的問題,利用了定點測距定位的方法實現了對公交定點停靠站進行測量和監管,公交停靠站規范監管系統的實現過程如圖1所示。整個系統由上位機監控臺和下位機測量監管設備組成。上位機監控臺包含了信號接收器、服務器及上位機軟件等,監控臺的主要功能是實現對于公交停靠站規范的實時監督和管控。下位機由定點測量設備和車載監管設備兩部分組成,定點測量設備采用激光測距技術判斷公交是否規范停靠站,車載監管設備與定點測量設備通過無線網絡進行通信,將停靠站是否規范的結果告知司機,并將相關信息上傳至上位機監控臺。此外,為了更好地區分每一輛公交車的信息,為每臺車載監管設備分配一個惟一的ID編碼,該ID編碼和該車載監管設備所在的公交的相關信息對應,即每一個車載監管設備綁定了對應公交車的相關信息。
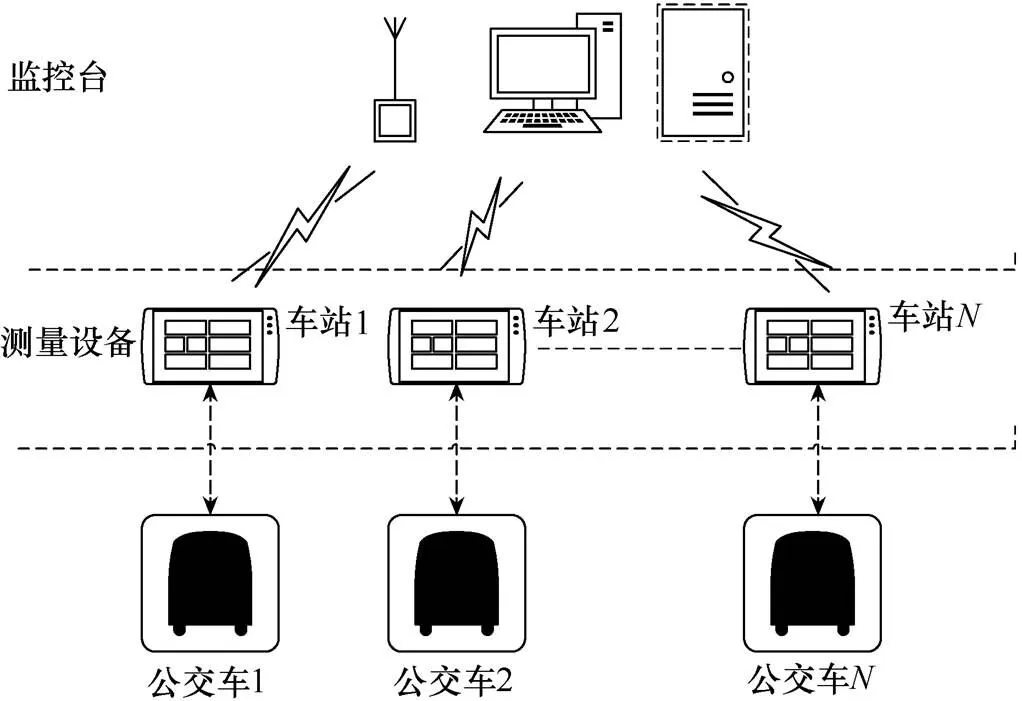
圖1 系統方案拓撲圖
系統的具體實現流程如下:每一部公交上都裝有車載監管設備,而且車載監管設備的ID編碼包含與之對應的公交的相關信息,如福州的55路公交,可將車載監管設備的ID編碼為CNFZ55。在每一個公交站臺安裝有定點測量設備。當公交停靠站后,定點測量設備的激光測距模塊將測量定位公交的停車位置,經過數據解算得到判別結果,并將結果通過無線通信網絡發送給車載監管設備,車載監管設備得到該數據信息后,在其消息字段加上公交的定位信息、時間信息、設備健康狀態等字段通過無線網絡通信模塊發送給上位機監控臺,從而實現對公交停靠站的實時監督和管控。此外,上位機控制臺還可提供相關反饋信息給車載監管設備,為公交司機提供下一步有益操作的建議。
2 公交車停車規范監管系統設計
2.1 硬件設計
定點測量設備包括定點測量模塊、無線通信模塊、中央控制模塊、防盜報警模塊、電源以及電源管理模塊,車載監管設備包括定位模塊、無線通信模塊、中央控制模塊,系統的總體結構如圖2所示。其中,定點測量設備的中央控制模塊選用的主控芯片是STM32單片機,測量模塊選擇激光測量測距模塊,防盜報警模塊采用高分貝的蜂鳴報警器,無線通信模塊選用NRF24L01通信模塊,電源部分采用鋰電池供電。車載監管設備中的中央控制模塊的主控芯片同樣采用了STM32單片機,無線通信模塊采用配對的NRF24L01通信模塊和SIM800H網絡通信模塊,定位模塊采用的是和芯星通的UM220模塊,電源取自公交車上電源,車載監管設備支持9~24V的直流電源輸入。

圖2 系統組成
定點測量設備和車載監管設備所采用的主控芯片都是意法公司的的STM32-F103C8T6單片機,主控芯片的最小系統電路圖如圖3所示。這款單片機是基于ARM的Cortex-M3內核[8],處理器的最高工作頻率可達72MHz[9],擁有64K容量的程序存儲器和豐富的外圍設備接口[10],滿足定點測量設備和車載監管設備的信息采集、數據處理和無線通信的要求。
測距傳感器采用意法半導體FlightSense技術的第二代激光測距傳感器VL53L0X,VL53L0X是世界上最小的飛行時間(ToF)測距傳感器,能夠將測距的有效長度增加到2m,可將精確度控制在±3%的誤差范圍內,測距時間不足30ms[11]。此外,FlightSense技術的核心優勢之一是選用了940nm波段,該波段對于外部光源的抗干擾能力更強。同時,測距模塊采用IIC通信,速度快,通過算法優化,可以達到極低延時的測距[12]。
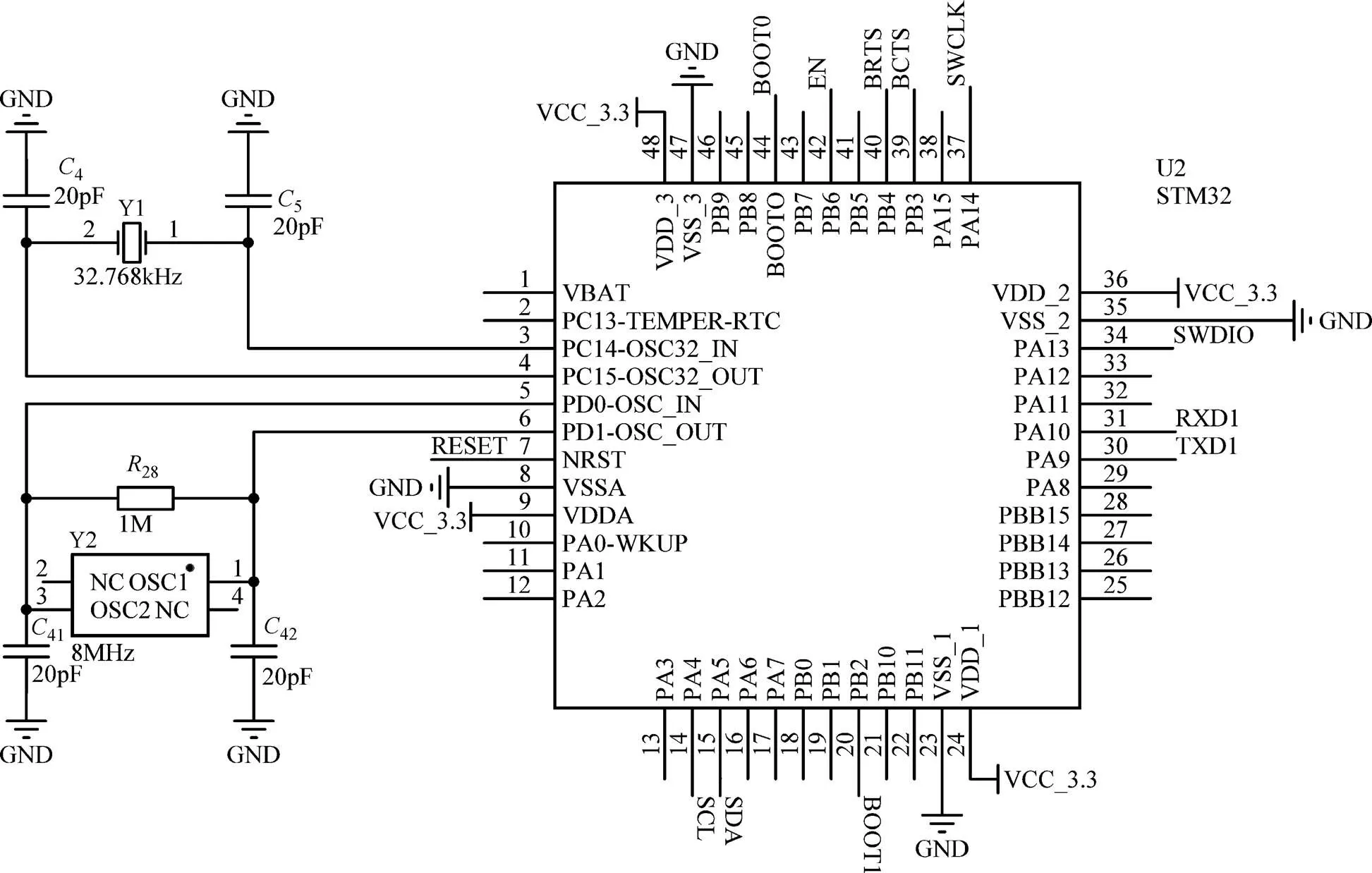
圖3 STM32-F103C8T6最小系統電路圖
2.2 軟件設計
系統的工作流程如圖4所示。首先進行系統的初始化操作,當公交車進站時,安裝在公交站兩端站牌上的定點測量設備中的定點測量模塊會對公交車的位置進行定位,采集定點測量的數據,對采集的數據進行判別篩選,剔除異常數據,然后通過對于測試點的測量數據進行解算,判斷公交車停靠站位置是否在預設的閾值范圍內,若不在閾值范圍內,則通過內置的無線通信模塊與車載監管設備內的無線通信模塊通信,告知司機該公交車沒有停靠到位,并將公交車的位置信息上傳至上位機監控管理控制臺,同時部署在公交車內的車載監管設備將定位模塊采集的公交車位置信息等特征信息上傳至上位機控制臺。
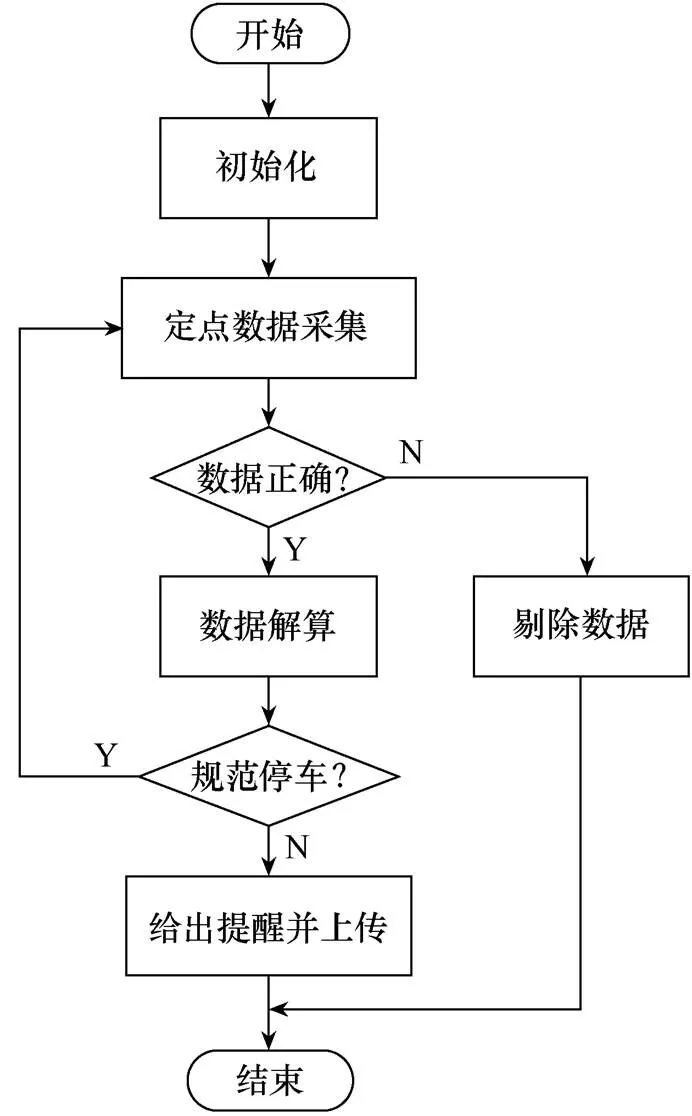
圖4 停車規范監管系統流程
定點測量部分是系統實現的重要環節,定點測量的工作流程如圖5所示。在實際應用中,利用激光傳感器進行測距的時候主要是對傳感器芯片進行地址初始化、打開、測試模式等相關的指令寫入操作,然后讀取傳感器芯片相關寄存器的值得到距離數據的字段,將該字段轉為十進制即得到測距的初始數據。操作傳感器芯片的指令包含芯片地址碼和功能碼等字段,如果操作失敗,就根據返回的代碼提示進行修改,重新寫入指令。完成初始化操作的相關指令時,模塊處于待機狀態,當完成寫入開始測量的指令時,單片機將讀取數據寄存器的數據字段。在完成測量任務時,可根據邏輯地址關閉相應的傳感器。
此外,定點測量部分中需保證采集數據的可靠性,即測量得到的數據是設備到公交車身的有效距離。因此,必須對所采集的數據進行預處理,錯誤的數據將帶來較大的誤差,必須對采集數據進行判別,剔除異常數據。
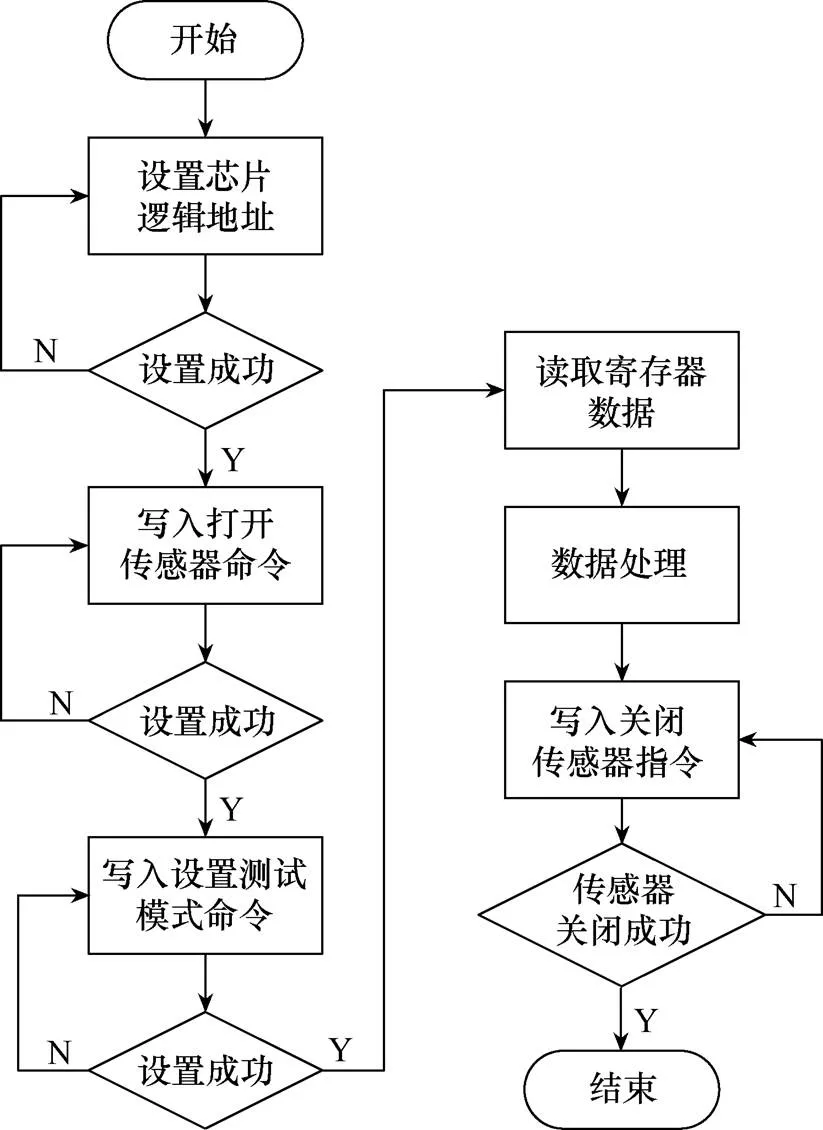
圖5 定點測量流程圖
3 實驗測試
為了驗證所研發的公交停靠站規范監管系統的有效性和可用性,需要將定點測量設備安裝在公交車站臺的固定位置上,在測試的公交上安裝車載監管設備并在公交實際停靠站過程中進行測試。本文考慮到在實際環境中進行調試的成本和安全問題,采用了模擬真實環境的方式進行實驗,為了最大程度上還原真實環境的特點,保證實驗的真實性、可靠性,本文在實驗室條件下按照真實的公交車站規格搭建了實驗模擬平臺,利用該平臺完成了相關實驗。
根據實際調研,公交車站牌的高度一般為2.5~2.7m,公交車的高度一般為2.5~3.5m之間。在模擬實驗平臺中,按照公交站牌和公交車的真實規格進行相關的部署,定點測量設備的安裝位置如圖6所示。將裝有激光傳感器的定點測量設備在公交車站牌前后兩側各安裝1臺,安裝高度為2.5m,測量角度向內30°。停靠區域為大于公交車身的矩形區域,以該矩形區域的幾何中心為參考原點,由2臺定點測量設備可以解算出公交車停靠站時公交車的幾何中心相對于停車區域的幾何中心的偏移量,從而確定公交車的停車規范程度。
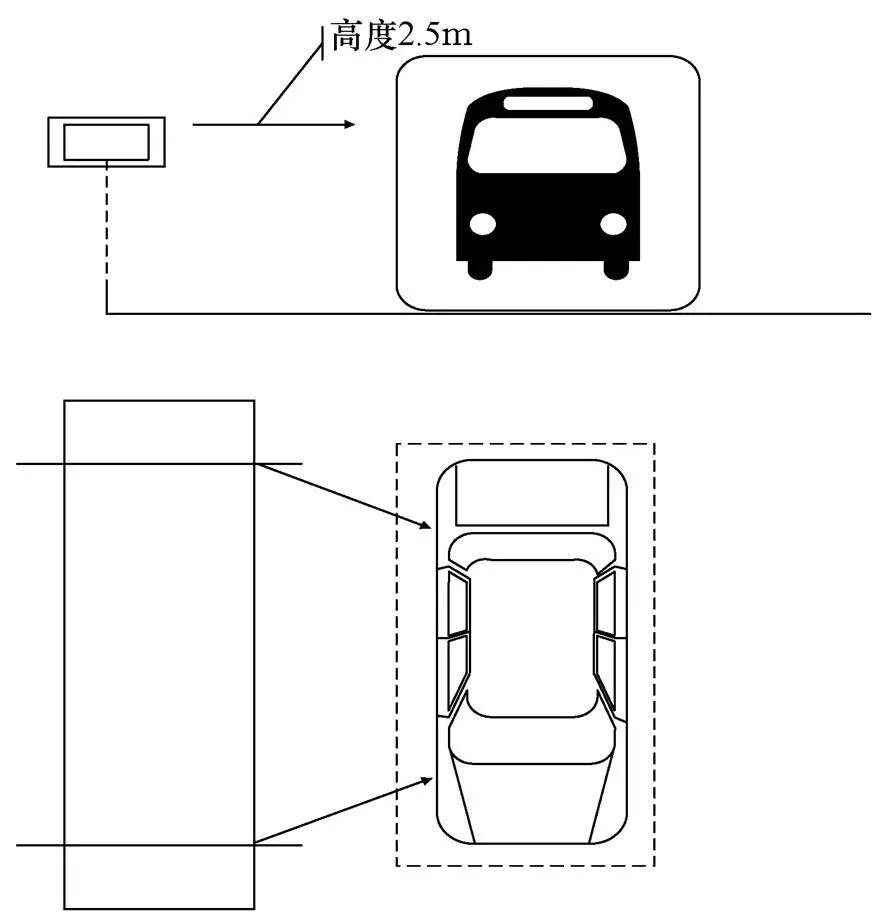
圖6 測量部署方案
在實驗室搭建的模擬測試平臺的實驗環境較為理想,在不存在障礙物遮擋的情況,對于是否規范停靠站的判斷的準確率可達90%以上,而在實際應用中,定點測量設備所在的高度也幾乎不存在遮擋的情況。實際應用中,盡可能避免定點測量設備前方被遮擋的情況,以減少誤判的幾率。只要兩臺定點測量設備檢測的距離都為有效距離,即可較為準確地判斷公交車是否規范停靠站。實驗測試中標定的閾值范圍為公交車車身不能超過規范停車區域的邊沿。車子停穩后2~3s后即可得出判斷結果,滿足當前的應用要求。
由于系統設計的目的是實現停靠站的規范監管,需長時間連續工作,故對于系統進行了壓力測試,實驗結果表明,設備可以長時間、穩定可靠地工作。
4 結論
針對公交停車規范問題,本文提出了一種基于激光測距的公交車停靠站規范監管系統,并通過模擬實驗平臺驗證了系統的有效性和可用性。系統擬解決的是在現代公交車系統中如何管控公交規范停靠站的問題,以提高現代公交系統的服務水平和減少公交停靠站的安全隱患。實驗測試表明,該系統檢測精度和測試效率高、操作簡便,具有一定的實用價值,但仍存在較大的改進空間,當存在障礙物遮擋時,系統的準確率將會降低,在將來的研究中,筆者打算采用攝像頭識別的方式進行輔助判斷公交停靠站的規范程度,進一步提高系統的可靠性。
[1] 許賡. 基于公交車載Wi-Fi模式的常規公共交通乘客滿意度研究[J]. 電子技術與軟件工程, 2018(8): 25.
[2] 徐永正. 城市公交精準停車系統關鍵技術研究[D]. 淄博: 山東理工大學, 2012.
[3] 盧春秀. 公交車輛站點停靠模型研究[D]. 長春: 吉林大學, 2017.
[4] 王學勇, 邵勇, 王玉石. 定點停靠公交站的服務效率與停靠能力研究[J]. 交通運輸研究, 2010(11): 202-205.
[5] 戴應康. 淺談城市公交車安全隱患及解決對策[J]. 人民公交, 2012(7): 57-59.
[6] 徐特, 孫華磊, 黃炯崗, 等. 一種基于ZigBee的公交車智能停靠解決方案[J]. 湖北科技學院學報, 2015, 35(12): 28-30.
[7] 張小麗, 陳峻, 王煒, 等. 基于公交可達性的公交站距優化方法[J]. 東南大學學報:自然科學版, 2009, 39(2): 384-388.
[8] 黃業川, 龍有煉, 李培鋒, 等. 智能微電網監控系統[J]. 電氣技術, 2015, 16(10): 76-79.
[9] Huang Y, Long Y, Li P, et al. The intelligent micro- power grid monitor system[J]. Electrical Engineering, 2015.
[10] 吳海金, 陳俊. 基于手勢識別的電視遙控手環設計[J]. 有線電視技術, 2017, 24(7): 57-59.
[11] 迎九. 第二代FlightSense的ToF激光測距的工程設計考量[J]. 電子產品世界, 2016, 23(9): 21-24.
[12] 陳志洲, 劉小河, 田雨聰. 基于STM32單片機測風系統的設計[J]. 電氣技術, 2016, 17(5): 31-35.
Fixed-point bus stop standard supervision system based on laser ranging
Chen Jun Wu Haijin
(College of physics and information engineering, Fuzhou University, Fuzhou 350002)
Aiming at the regulation problem of bus stop, a standard supervision system for bus stop based on laser ranging is proposed. The system includes two parts: the upper machine console and the lower machine. The upper computer console communicates with the measuring device of the lower computer through the wireless communication network, and the measuring device of the lower computer uses the laser ranging technology to judge whether the bus regulates the stopping station, and transmits the result to the vehicle monitoring device through the wireless communication network to inform the driver. And upload relevant information to the host computer console for supervision and control. Results of the experiment indicate that the system features high precision and efficiency, and ease of operation, and it can effectively supervise the specification of bus stop, which has good practical value.
laser ranging; bus stop; supervision system; fixed-point measurement
2018-07-05
陳 俊(1978-),男,副教授,主要研究方向為嵌入式系統、智能家居。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
北部灣大學學報(2022年1期)2022-06-22 04:58:38
北部灣大學學報(2022年2期)2022-06-21 11:44:36
現代儀器與醫療(2021年4期)2021-11-05 08:25:08
北部灣大學學報(2021年4期)2021-04-28 08:01:04
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
