基于理論分析與仿真驗證的船用空壓機平衡軸設計*
2018-12-27 01:42:32胡甫才魏志威薛厚強
武漢理工大學學報(交通科學與工程版) 2018年6期
胡甫才 魏志威* 徐 陽 薛厚強 高 碩
(武漢理工大學高性能船舶技術教育部重點實驗室 武漢 430063) (武漢理工大學能源與動力工程學院 武漢 430063)
0 引 言
往復式空氣壓縮機通過曲柄連桿機構將活塞的往復運動轉變為曲軸的旋轉運動,曲柄連桿活塞機構的運動會產生不平衡慣性力,從而產生振動[1],這不僅會使運動部件產生磨損和疲勞破壞甚至斷裂,降低設備的使用壽命,而且也會產生噪聲污染,影響工作人員的健康.為了減小了空壓機的激勵力從而降低整機的振動,最終降低整機的噪聲水平,提升舒適性和延長機器的使用壽命,本文以某船用往復式空壓機為研究對象,從減小或消除空壓機的振動源這一根本措施出發,以結構動力學分析為基礎,設計平衡軸[2]機構,從而達到平衡空壓機內部各種不平衡力(矩)的目的.
本文研究某船用往復式空壓機的理論價值是通過ADAMS軟件對結構振動進行仿真分析對比,權衡加裝平衡軸機構的可行性與優缺點,對實踐有一定指導意義.
1 空壓機動力學分析與求解
本文研究的船用空壓機的型號為CZ60/30,其運動部件的參數見表1.
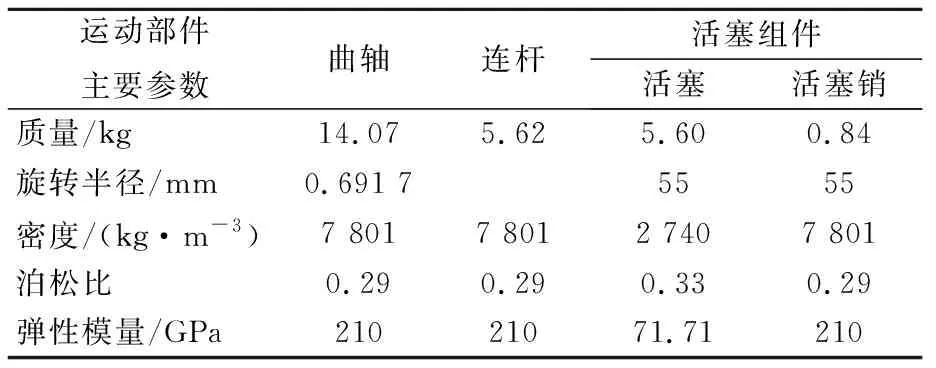
表1 曲柄連桿機構材料的主要參數
由于連桿的運動方式較為復雜,根據等效質量分解法可簡化運動部件達到簡化動力學分析[3]的目的,可求出等效連桿小端質量為m1=1.52 kg;等效連桿大端質量為m2=4.10 kg.
1.1 慣性力求解
空壓機中的慣性力[4]主要有兩種,一種是曲柄和連桿大端做旋轉運動的旋轉慣性力;另一種是活塞組件和連桿小端直線來回運動產生的往復慣性力.
往復式空氣壓縮機的旋轉慣性力由以下兩方面構成,主要部分是曲柄旋轉產生的慣性力;次要部分是連桿大端及一部分等效質量旋轉產生的慣性力.
由牛頓力學離心力公式可求旋轉慣性力為
Fx=mxrxω2=mqrqω2+m2rω2=1 452.68 N
(1)
式中:mq為曲軸質量;m2為等效連桿大端質量;rq為曲軸的旋轉半徑.
往復慣性[5]力大小跟往復運動的部件產生的加速度a大小成正比,且具有相反的方向,根據牛頓第二定律F=ma,得出其計算公式為
Fw=-ma=-(mh+mx+m1)×
rω2(cos (ωt)+λcos 2 (ωt))
(2)
式中:mh為活塞組件質量;mx為活塞銷質量;m1為等效連桿小端質量;r為曲柄半徑;a為加速度;λ為連桿比;ω為曲柄角速度,根據ω=2πn,(h為曲軸轉速)n取750 r/min.
以上公式中包含前兩階的往復慣性力,忽略了高階的往復慣性力.兩階往復慣性力可分解為
一階往復慣性力:
FwⅠ=-(mh+mx+m1)×
rω2cos (ωt)=FⅠcos (ωt)
(3)
二階往復慣性力:
FwⅡ=-(mh+mx+m1)r×
ω2λcos2 (ωt)=FⅡcos2 (ωt)
(4)
式中:FⅠ為一階往復慣性力幅值大小;FⅡ為二階往復慣性力的幅值大小;代入各已知參數的數據分別計算得到FⅠ=-2 698.09 N;FⅡ=-562.01 N.
由于曲軸箱大小的限制,無法同時平衡兩階往復慣性力,一階的力占總往復慣性力的80%以上,因此,文中只研究平衡一階往復慣性力.
1.2 氣體作用力
往復式空氣壓縮機CZ60/30的氣體力[6]除了作用在活塞頂部外,還對活塞底部有作用力,即存在低壓級和高壓級的氣體壓力.根據氣體力計算公式,將高壓級和低壓級氣體力合并可得到氣體力隨時間變化的曲線圖,見圖1.
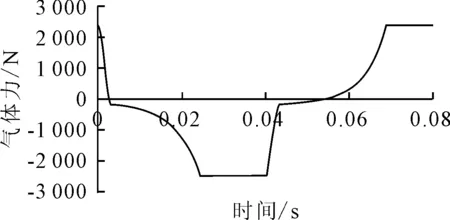
圖1 氣體力變化曲線圖
1.3 傾覆力矩計算
由于活塞組件產生的往復慣性力及氣體力對氣缸和連桿施加力,使其產生的側推力對曲柄旋轉中產生傾覆力矩和沿連桿的分力對曲柄旋轉中心產生轉矩.曲柄連桿機構受力分析圖見圖2.
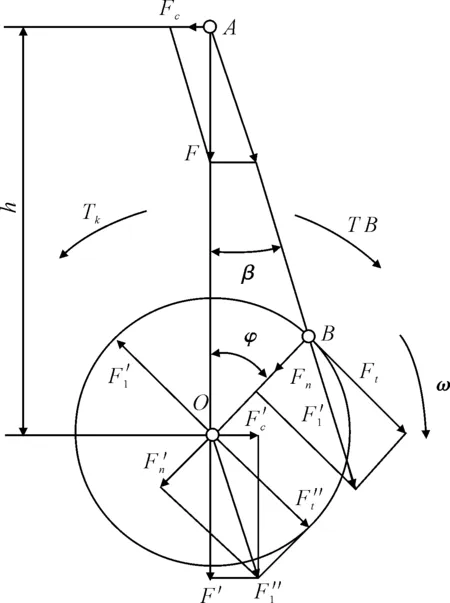
圖2 曲柄連桿機構受力分析圖
作用在活塞上面的力F主要有氣體力和慣性力,通過連桿力的傳遞作用,在A處把力F分解為兩個側推力,再在B點分解側推力,指向圓心的力不產生力矩,與圓相切的力產生力矩.根據力矩公式得到傾覆力矩T的計算公式為
T=FcX=Ftanβ(rcos (ωt)+lcosβ)=
(5)

2 平衡軸設計
2.1 平衡軸參數計算
首先假設兩根平衡軸的位置、質量和質心旋轉半徑一致,由于雙平衡軸的旋轉方向相反[7-8],兩根平衡軸水平方向的旋轉慣性力相互抵消,垂直方向分力相互疊加用來平衡一階往復慣性力.圖3為雙軸平衡軸的受力分解圖,根據算得的一階往復慣性力的幅值為2 698.09 N,可以計算一根平衡軸在豎直方向需平衡的慣性力為
m1)rω2=-1 349.05 N
(6)
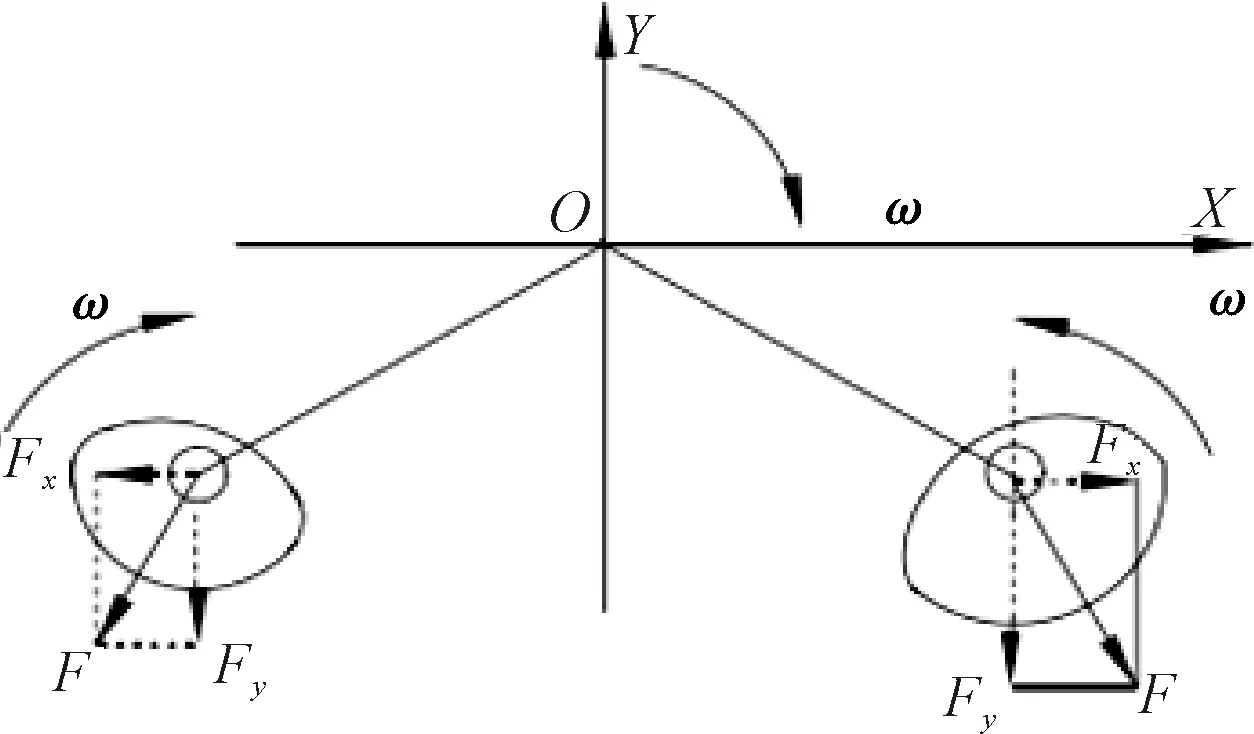
圖3 雙軸平衡軸受力分解圖
由于曲軸沒有采用過量平衡法,連桿等效大端質量旋轉運動形成的慣性力無法平衡,因此兩根平衡軸參數相同不可行,要額外考慮連桿等效大端質量旋轉慣性力,需要在其中一根平衡軸增加部分質量,此部分旋轉慣性力為
FE=mrω2=mqrqω2+m2rω2=1 452.68 N
(7)
因此,兩根平衡軸大小不相同,其旋轉慣性力為
Fx=mxrxω2=1 349.05 N
(8)
Fd=mdrdω2=FY+FE=2 801.73 N
(9)
式中:Fd為大平衡軸旋轉慣性力;Fx為小平衡軸旋轉慣性力;md為大平衡軸質量;mx為小平衡軸質量;rd為大軸旋轉半徑,rx為小平衡軸旋轉半徑.
通過UG軟件建立初步的三維模型,根據平衡軸旋轉慣性力的大小,采用實體分析模塊計算出實體的體積、回轉半徑、質心和旋轉慣性力等參數,從而得到平衡軸的實體參數見表2.
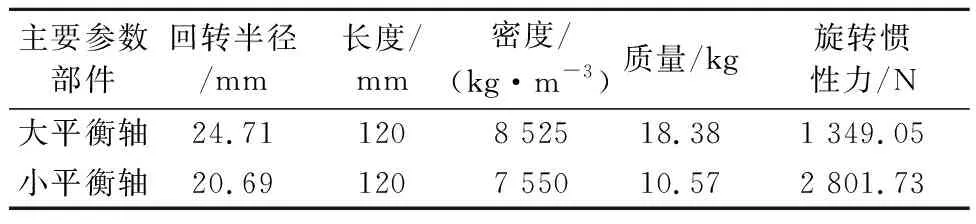
表2 大小平衡軸的主要參數
2.2 平衡軸位置分析
在平衡軸布置時,要達到既可以平衡一階往復慣性力和旋轉慣性力,又能平衡部分傾覆力矩的效果.由1.3的計算表明,傾覆力矩不是標準的正弦或余弦函數,是由正余弦函數相加和相乘得到的非標準周期函數形式,而平衡軸產生的力矩是周期的正弦或余弦函數形式,兩者不能完全抵消,只能采用理論計算,尋找最佳的平衡軸位置.
經對比分析,本文采用粗細雙軸平衡機構對稱布置方式為最佳.圖4為粗細雙平衡軸機構對稱布置示意圖,由圖4可知,兩根平衡軸是對稱布置但大小不一樣,產生的旋轉慣性力大小也不同,且旋轉方向相反.根據受力分解,在Y軸方向的分力是同向相疊加,效果是與一階往復慣性力相抵消;雖然力臂大小相同,但正因為力的大小不同,對機體而言,兩者對O點的力矩相疊加成附加力矩;在X軸方向的力大小和方向不一致,效果是部分相抵消且會在X軸方向產生附加的不平衡力,雖然力臂大小一致,但最終在X軸方向也會產生附加力矩.通過合理調整平衡軸的安裝位置,使其在X軸和Y軸方向產生的力矩大小不同,形成一個合力矩,最終平衡部分傾覆力矩.
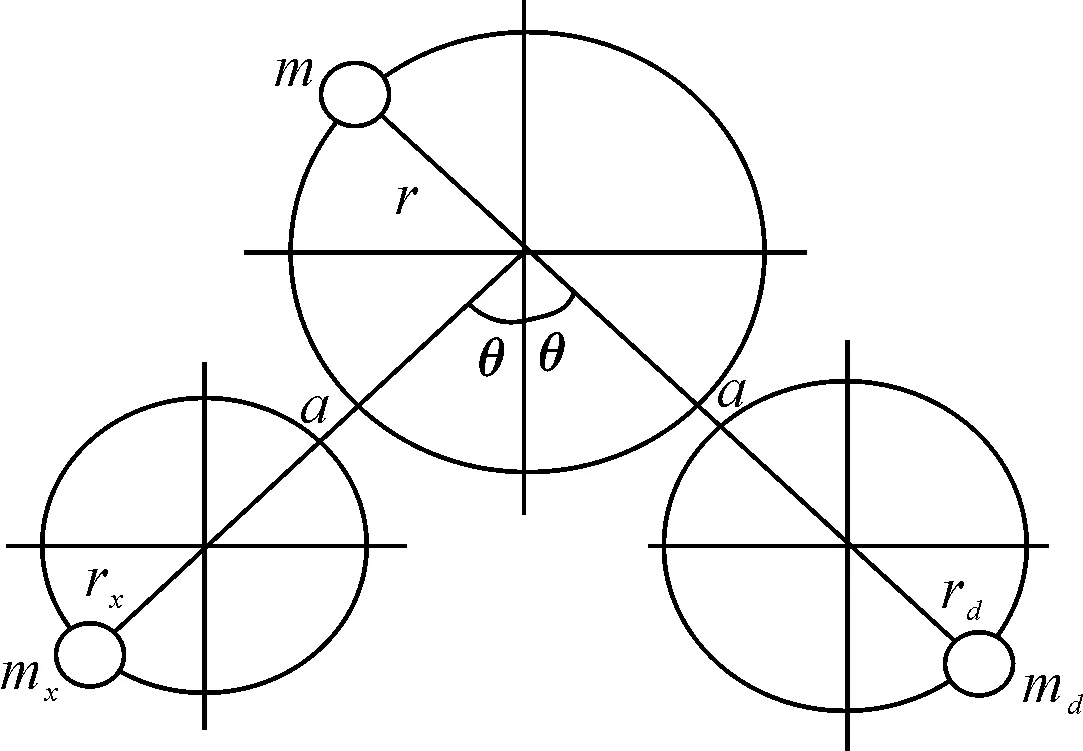
圖4 粗細雙平衡軸機構對稱布置示意圖
2.3 傾覆力矩對比分析
氣體力和活塞組件的往復慣性力的水平分力均可以產生傾覆力矩,1.3中推導出了傾覆力矩的計算公式.通過Matlab編程畫出活塞組件的往復慣性力和氣體力的合力及傾覆力矩的曲線見圖5.
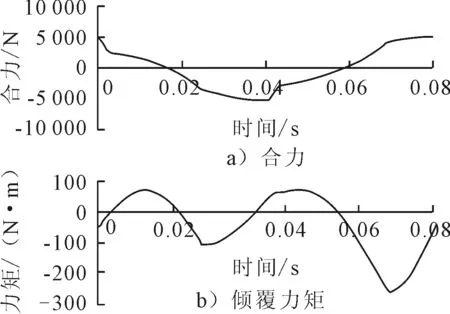
圖5 往復慣性力和氣體時域圖
加裝平衡軸前后傾覆力矩的時域圖見圖6.
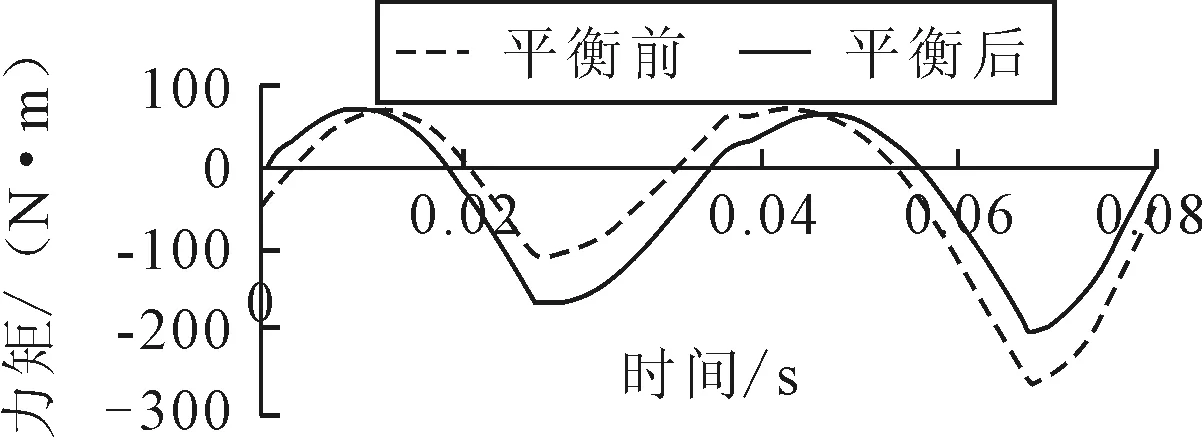
圖6 平衡前后傾覆力矩對比時域圖
由圖6可知,上述方法可以平衡部分傾覆力矩,由于有效平衡傾覆力矩是建立在平衡二階往復慣性力上的,而本文設計的目的是平衡一階慣性力且能部分平衡傾覆力矩,已經達到了設計的初衷.
3 空壓機動力學仿真分析
首先,使用UG軟件對CZ60/30空氣壓縮機和平衡軸機構進行三維建模.使用ADAMS軟件對空壓機模型進行多剛體動力學仿真[9-10],其目的是驗證運動部件的往復慣性力和旋轉慣性力的理論計算的正確性及加裝平衡軸的效果.對仿真模型設置驅動轉速為750 r/min,周期0.08 s,步長800步,在去除重力影響的前提條件下,大小平衡軸和曲軸的仿真結果見圖7.
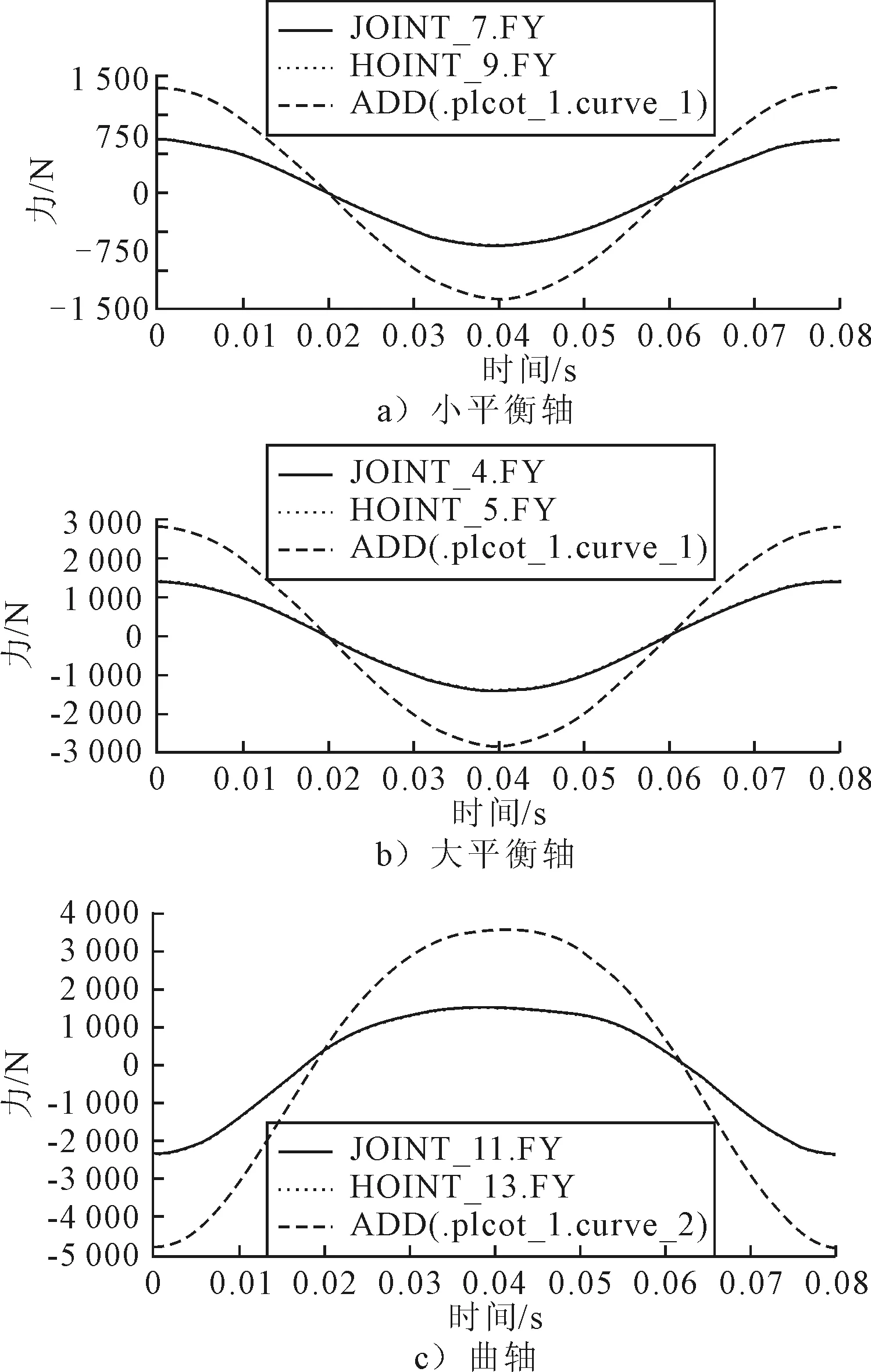
圖7 Y方向旋轉慣性力曲線
由圖7可知,大小平衡軸和曲軸各自兩端的慣性力在Y方向上的變化規律是一致的,圖中也求出了軸兩端的合力在Y方向上的變化,從而可以得到慣性力的仿真值與理論計算值的對比,見表3.
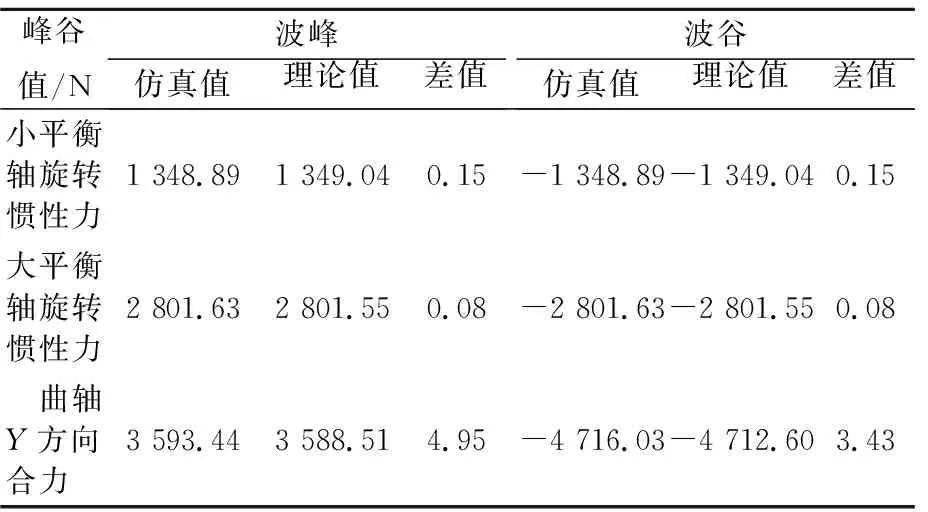
表3 慣性力極值對比
由表3可知,仿真值與理論計算值的波峰與波谷值幾乎一致,誤差小于0.01%.因此,有理由認為多剛體動力學仿真過程和理論計算均合理正確.圖8為空壓機Y方向慣性力曲線圖.
由圖8可知,以正向為起點的點畫線為大小平衡軸在Y方向的旋轉慣性力合力曲線,以負向為起點的實曲線是曲軸軸承在Y方向的慣性力曲線,中間的點畫曲線是兩者合力曲線.圖8可以清晰的看出平衡軸對曲軸慣性力的平衡作用.表4為加裝平衡軸后的仿真合力與曲軸慣性力的極值對比,可以得到,在Y方向的激勵力峰谷差值從8 309.77 N減小為1 196.64 N,理論上能有效平衡了85.60%的Y方向的激勵力.因此,根據仿真結果與理論計算的一致性,充分驗證了平衡軸的參數理論計算與模型設計均合理正確,能有效平衡整機豎直方向的激勵力.

表4 合力極值對比
4 空壓機瞬態響應分析
通過平衡軸的設計計算,理論上平衡了較大部分不平衡力和力矩,有效減小了機體內部產生的激勵力,從而達到減弱振動的目的.采用瞬態響應分析方法,重點分析機體位移,對比有無平衡軸對空壓機結構瞬態響應的優化效果.
本文使用MSC Patran&Nastran軟件進行瞬態響應分析[11],在空壓機的實體模型和有限元模型建立之后,定義材料屬性,對有限元模型施加邊界條件并加載激勵力,然后進行計算.選取振動最復雜的缸蓋頂部中心節點的Y方向的位移時域圖進行分析,見圖9.
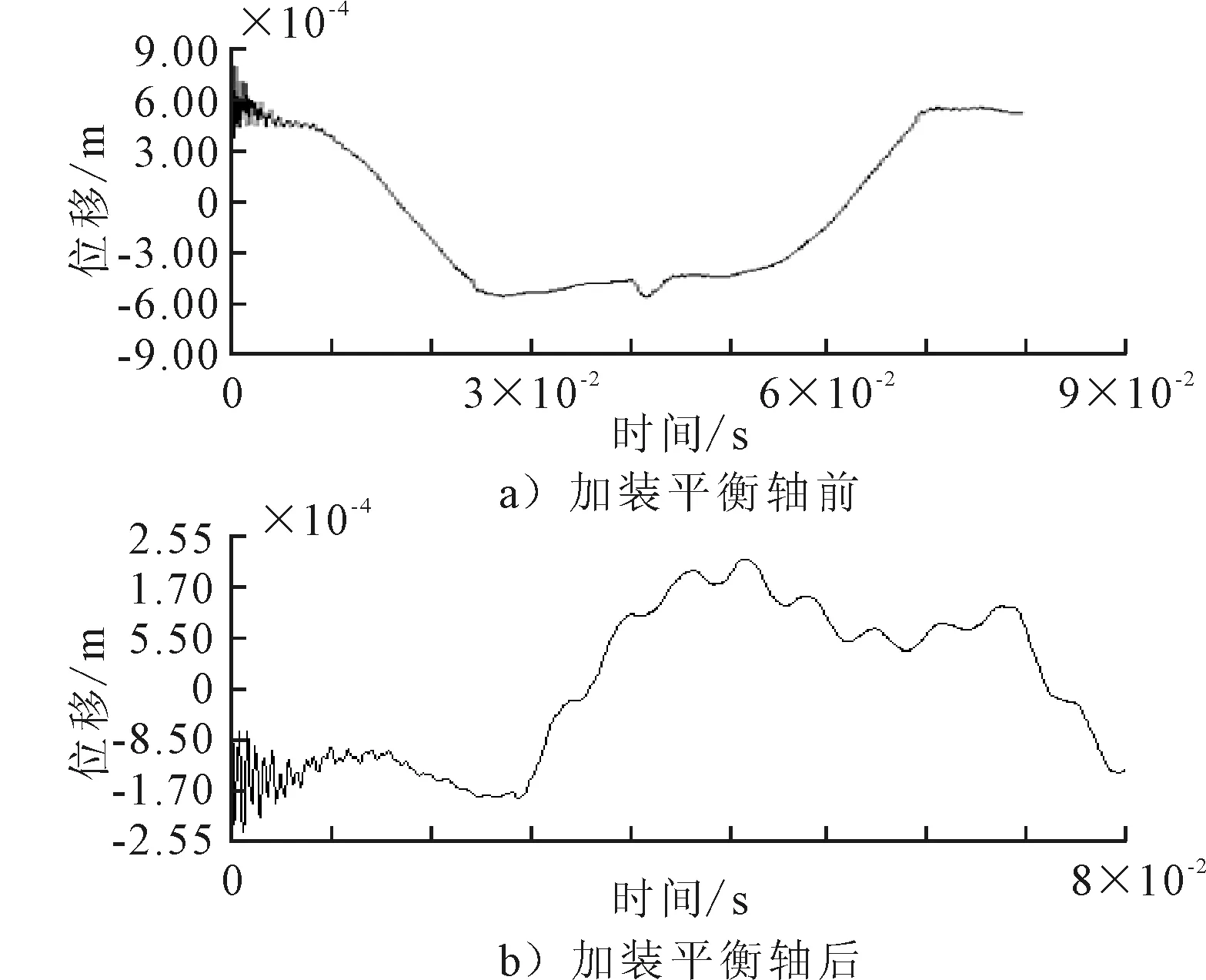
圖9 節點在Y軸方向的位移時域圖
由圖9可知,加裝平衡軸前后其位移幅值變化較大,幅值范圍從-0.6~0.8 mm變為-0.31~0.49 mm,且加裝平衡軸后曲線變化規律較為平緩.根據振動瞬態響應位移時域圖對比分析結果可知,機體的位移與受力變化趨勢具有一致性特點,通過平衡軸的平衡作用,能有效平衡空壓機機體內部產生的不平衡力和力矩,達到優化機體振動動態特性的目的.
5 結 論
1) 使用ADAMS軟件進行動力學仿真計算,對比理論與仿真計算得到的慣性力值,誤差在0.01%以內,驗證了動力學仿真過程和理論計算均合理正確.
2) 對比仿真計算得到的加裝平衡軸前后空壓機慣性力的值,理論上能有效平衡了85.60%的Y軸方向的慣性力,有充分理由說明平衡軸的參數理論計算與模型設計均合理正確,能有效平衡Y方向的激勵力.
3) 選取缸蓋中心節點做瞬態響應分析,對比此節點加裝平衡軸前后Y方向位移,有大幅度減小,證明通過平衡軸的平衡作用,能有效平衡空壓機機體內部產生的不平衡力和力矩,達到優化機體振動動態特性的目標.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
汽車觀察(2016年3期)2016-02-28 13:16:26