基于KL散度的駕駛員駕駛習(xí)性非監(jiān)督聚類?
2018-12-12 01:55:20蔣淵德鄧偉文
汽車工程 2018年11期
關(guān)鍵詞:駕駛員
朱 冰,蔣淵德,鄧偉文,楊 順,何 睿,蘇 琛
(吉林大學(xué),汽車仿真與控制國家重點(diǎn)實(shí)驗(yàn)室,長春 130025)
前言
深入理解和準(zhǔn)確辨識(shí)駕駛員駕駛習(xí)性是設(shè)計(jì)先進(jìn)駕駛員輔助系統(tǒng)(advanced driver assistance system,ADAS)和人性化無人駕駛車輛的前提和基礎(chǔ)。但駕駛員駕駛習(xí)性紛繁復(fù)雜且動(dòng)態(tài)變化,不同年齡、不同性別、不同性格、不同駕齡和不同駕駛熟練程度等都會(huì)對駕駛習(xí)性產(chǎn)生顯著影響[1]。因此,駕駛員駕駛習(xí)性研究已經(jīng)引起越來越多的關(guān)注和重視。
在個(gè)性化ADAS設(shè)計(jì)方面,當(dāng)前的研究主要包括在線學(xué)習(xí)控制算法和離線系統(tǒng)設(shè)計(jì)兩類。清華大學(xué)張磊將駕駛員縱向加速度決策建模為跟車時(shí)距(time headway,THW)和碰撞時(shí)間倒數(shù)(inverse of the time to collision,TTCi)的線性函數(shù),通過模型參數(shù)對駕駛員縱向駕駛習(xí)性進(jìn)行表達(dá),進(jìn)而實(shí)現(xiàn)了基于最小二乘法的在線學(xué)習(xí)縱向控制算法[2]。文獻(xiàn)[3]中認(rèn)為車輛縱向加速度決策是車間距、相對車速和主車速度等特征變量的線性函數(shù),能夠在一定程度上反映駕駛員的縱向駕駛過程。然而,在線學(xué)習(xí)策略受工況選擇和傳感器測量噪聲影響很大。離線系統(tǒng)設(shè)計(jì)方案在離線狀態(tài)下針對不同駕駛習(xí)性進(jìn)行控制策略設(shè)計(jì),具有較高可靠性[4]。而如何理解駕駛員駕駛習(xí)性是這兩類方法的基礎(chǔ)性問題,是個(gè)性化駕駛系統(tǒng)的設(shè)計(jì)前提。針對這一問題,文獻(xiàn)[5]中以設(shè)計(jì)考慮不同駕駛習(xí)性的個(gè)性化自適應(yīng)巡航系統(tǒng)(adaptive cruise control,ACC)為研究內(nèi)容,對駕駛員縱向駕駛行為進(jìn)行了研究。南加州大學(xué)的學(xué)者將駕駛員換道所需時(shí)間視為駕駛習(xí)性的表征參數(shù),利用高斯混合模型(Gaussian mixture model,GMM)對其進(jìn)行估計(jì),設(shè)計(jì)了個(gè)性化換道模型[6]。文獻(xiàn)[7]中將駕駛員類型辨識(shí)視作一個(gè)分類問題,利用支持向量機(jī)將駕駛員分為激進(jìn)型和溫和型。吉林大學(xué)的研究人員通過GMM對駕駛員駕駛習(xí)性類別進(jìn)行了辨識(shí)[8]。此外,神經(jīng)網(wǎng)絡(luò)模型和學(xué)習(xí)型模型預(yù)測控制等方法在個(gè)性化ADAS設(shè)計(jì)中也得到了廣泛應(yīng)用[9-10]。
在這些相關(guān)研究中,如何準(zhǔn)確表征不同駕駛員駕駛習(xí)性之間的差異是首先需要解決的基礎(chǔ)問題。文獻(xiàn)[11]中利用沖擊度分析,將駕駛員分為不同的類型。文獻(xiàn)[12]和文獻(xiàn)[13]分別基于駕駛數(shù)據(jù)和統(tǒng)計(jì)數(shù)字特征對不同類型的駕駛員進(jìn)行了聚類。然而,人類駕駛員作為一個(gè)復(fù)雜的強(qiáng)隨機(jī)性個(gè)體,單一數(shù)字特征指標(biāo)難以準(zhǔn)確地表征不同的駕駛習(xí)性,也無法從駕駛數(shù)據(jù)的整體分布情況來考慮不同駕駛員之間的相似性。
為深入研究駕駛員駕駛習(xí)性的特征規(guī)律和差異性表征方法,本文中構(gòu)建了駕駛員實(shí)車道路試驗(yàn)采集系統(tǒng),采集了84名駕駛員在典型縱向跟車工況下的駕駛數(shù)據(jù);將每名駕駛員的駕駛數(shù)據(jù)視為一個(gè)高維連續(xù)空間下的GMM,以不同分布之間的KL散度(Kullback-Leibler divergence,又名相對熵)作為駕駛員差異性的衡量標(biāo)準(zhǔn);為解決兩個(gè)GMM之間KL散度沒有解析解的問題,引入蒙特卡洛算法進(jìn)行近似求解;從而創(chuàng)新性地實(shí)現(xiàn)了基于KL散度的駕駛員駕駛習(xí)性非監(jiān)督聚類。
1 駕駛員駕駛數(shù)據(jù)采集
1.1 駕駛員駕駛數(shù)據(jù)采集平臺(tái)
為采集駕駛員在實(shí)際駕駛狀態(tài)下的駕駛數(shù)據(jù),建立了駕駛員駕駛數(shù)據(jù)實(shí)車道路試驗(yàn)采集平臺(tái),如圖1所示。

圖1 駕駛員駕駛數(shù)據(jù)采集平臺(tái)
數(shù)據(jù)采集平臺(tái)包括一輛主車和一輛交通車。主車和交通車上各安裝有一套Oxford Technical Solutions公司的RT3002和RT-Range慣導(dǎo)系統(tǒng),該系統(tǒng)通過固定參考站GPS Base Station和車輛移動(dòng)站進(jìn)行差分定位,能精確地確定車輛位置。另外,慣導(dǎo)系統(tǒng)還能夠精確測量車速、航向角和加速度等車輛狀態(tài)信息。兩個(gè)RT-Range之間通過無線局域網(wǎng)通信,主車能夠?qū)崟r(shí)接收交通車狀態(tài)信息,對兩車間的相對距離、相對車速等相對狀態(tài)信息進(jìn)行采集。試驗(yàn)過程中,前方交通車由一個(gè)技術(shù)熟練的駕駛員駕駛,被測駕駛員駕駛主車跟隨前車行駛,通過CANoe從主車CAN總線實(shí)時(shí)采集被測駕駛員的操控信息,包括加速踏板行程、主缸壓力和轉(zhuǎn)向盤轉(zhuǎn)角等。由于各采集信號(hào)均可通過CAN網(wǎng)絡(luò)輸出,所以各信號(hào)之間容易保持時(shí)間同步。
1.2 被測駕駛員
為充分考慮被測駕駛員的隨機(jī)性,面向社會(huì)廣泛招募了84名不同職業(yè)、年齡和駕齡分布的駕駛員,如表1所示。其中,既包括普通非職業(yè)駕駛員,也包括若干職業(yè)駕駛員(如出租車駕駛員、代駕駕駛員和職業(yè)賽車手等)。樣本中共有61名男性駕駛員和23名女性駕駛員,平均駕齡為5.71年(標(biāo)準(zhǔn)差SD為5.16)。
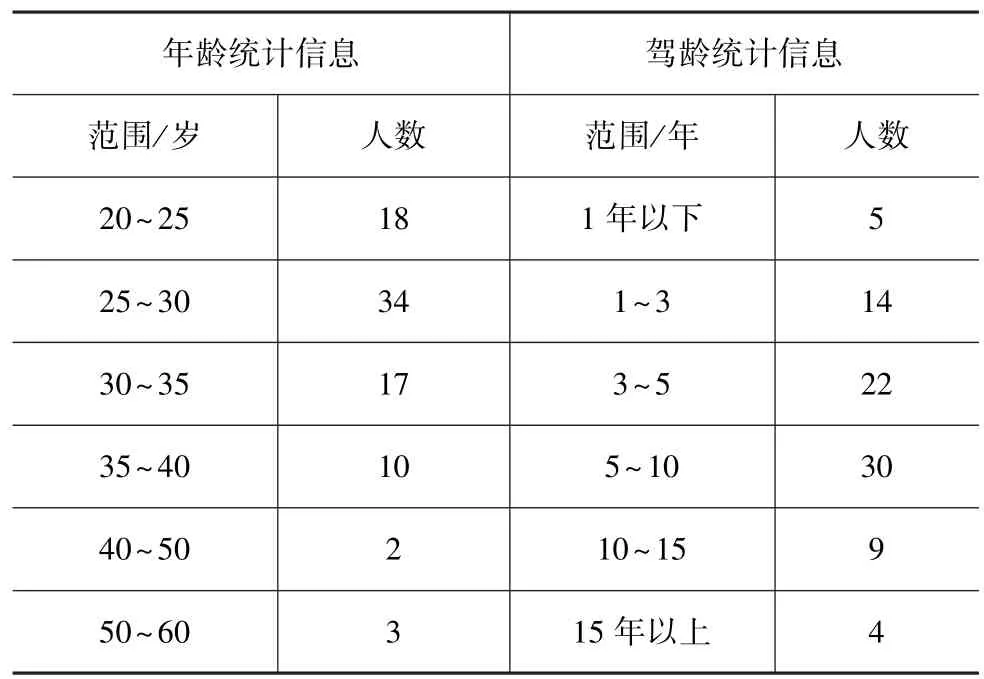
表1 駕駛員統(tǒng)計(jì)信息
1.3 駕駛員駕駛數(shù)據(jù)采集試驗(yàn)設(shè)計(jì)
選取長春國際汽車公園附近的丙十二路(圖2(a)),對84名駕駛員在真實(shí)駕駛場景下的駕駛數(shù)據(jù)進(jìn)行了采集。

圖2 試驗(yàn)場地和工況
為對駕駛員縱向駕駛習(xí)性進(jìn)行測試,設(shè)計(jì)了縱向跟車行駛試驗(yàn)工況,前方交通車按照0-20km/h-50km/h-70km/h-50km/h-20km/h-0的速度行駛,期間包括加速、減速和勻速等不同的行駛狀況,加/減速時(shí)間為2s左右,以利用較大加/減速情況激勵(lì)主車駕駛員駕駛習(xí)性,圖2(b)為部分試驗(yàn)中的實(shí)際前車行駛速度曲線。
2 基于GMM的駕駛數(shù)據(jù)統(tǒng)計(jì)建模
為表征縱向駕駛過程,選擇特征變量集合f=(s,Δv,vh,ah,vp,ap)對跟車過程進(jìn)行描述。 其中,s為兩車之間的相對距離,Δv為相對車速,vh和vp分別為主車和前方交通車速度,ah和ap分別為主車和前方交通車加速度。
在傳統(tǒng)的駕駛習(xí)性聚類算法中,通常以各樣本點(diǎn)或其數(shù)字特征作為聚類對象,將樣本之間的幾何距離作為駕駛員之間的相似性表征。然而,駕駛員在實(shí)際駕駛過程中存在著很強(qiáng)的隨機(jī)性,從統(tǒng)計(jì)角度看,每個(gè)駕駛員的駕駛數(shù)據(jù)有獨(dú)特的統(tǒng)計(jì)分布,難以用單一數(shù)字特征參數(shù)對其進(jìn)行表征。以縱向駕駛為例,保守型駕駛員可能在車間距較大時(shí)就以較小的減速度減速接近前車,而激進(jìn)型駕駛員可能在相距較近時(shí)才開始減速,兩種情況下的統(tǒng)計(jì)樣本均值差別不大,而各自的分布情況差異明顯。針對這一問題,本文中將每個(gè)駕駛員的駕駛數(shù)據(jù)視作一個(gè)獨(dú)特的高維空間下的連續(xù)分布。
GMM能夠?qū)θ我夥植家?guī)律的概率密度函數(shù)進(jìn)行擬合,在圖像和語音等領(lǐng)域得到了廣泛應(yīng)用。因此,引入GMM對駕駛數(shù)據(jù)的統(tǒng)計(jì)分布進(jìn)行表達(dá)。
在d維特征空間中,每個(gè)基本高斯概率密度函數(shù)為
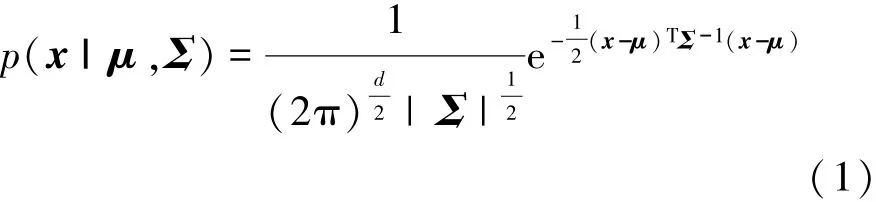
式中:μ為均值向量;Σ為協(xié)方差矩陣。
GMM將觀測到的數(shù)據(jù)視為若干基本高斯概率密度函數(shù)的線性組合:

式中:k為基本高斯概率密度函數(shù)的個(gè)數(shù);αi為第i個(gè)高斯成分的混合系數(shù)
利用采集得到的駕駛數(shù)據(jù)對GMM進(jìn)行訓(xùn)練,即對式(2)參數(shù)進(jìn)行估計(jì),可得到不同駕駛員駕駛數(shù)據(jù)的分布規(guī)律。本文中采用最大期望迭代法(expectation-maximization,EM)對GMM參數(shù)進(jìn)行估算。記數(shù)據(jù)集為 D={x1,x2,…,xN},假定這些數(shù)據(jù)點(diǎn)是獨(dú)立地從概率分布中采樣而得,根據(jù)GMM的模型函數(shù)可得對數(shù)似然函數(shù)如下:

EM算法的目標(biāo)是均值、協(xié)方差和混合系數(shù)等參數(shù)的最大化似然函數(shù)。對參數(shù)進(jìn)行初始化后,算法主要包括E步驟和M步驟。
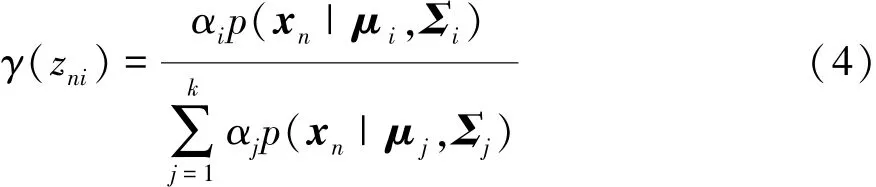
E步驟,根據(jù)當(dāng)前參數(shù)計(jì)算后驗(yàn)概率,即駕駛數(shù)據(jù)xn由第i個(gè)高斯分布產(chǎn)生的概率為
M步驟,利用當(dāng)前的后驗(yàn)概率對參數(shù)進(jìn)行重新評(píng)估:

本文中選擇k=3。以Driver02的GMM建模為例,其參數(shù)估計(jì)結(jié)果如表2所示。
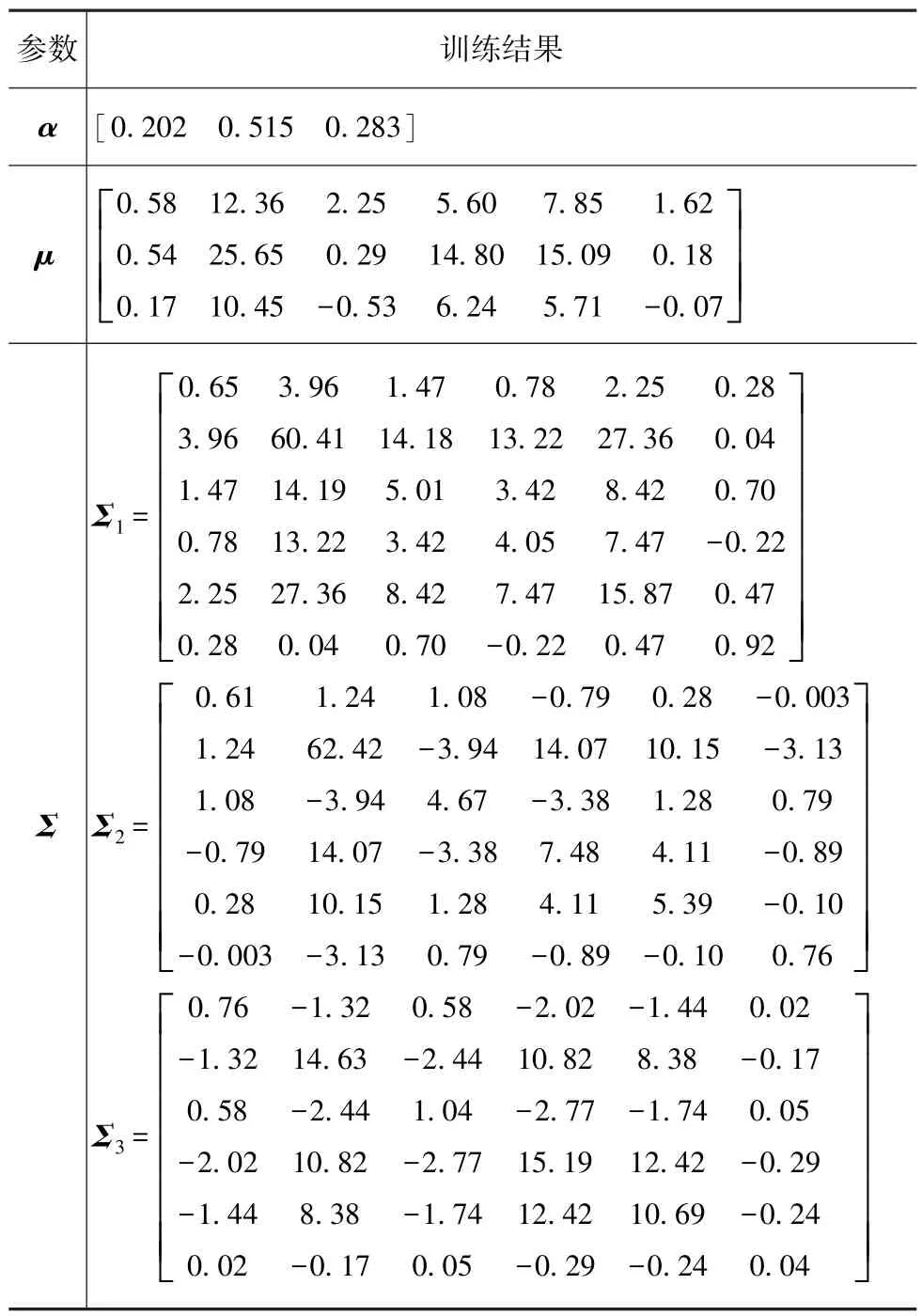
表2 GMM參數(shù)估計(jì)示例
3 基于KL散度的駕駛習(xí)性聚類算法
聚類的主要任務(wù)就是將相似的數(shù)據(jù)對象聚為一類,因此如何度量數(shù)據(jù)對象之間的相似性是聚類分析中的核心問題,決定了聚類效果。傳統(tǒng)的樣本相似性度量方式包括歐氏距離、余弦相似性及Jaccard等,這些方法能對各樣本點(diǎn)之間的距離進(jìn)行衡量[14]。然而,這些傳統(tǒng)的距離度量方式難以對上述不同駕駛員GMM分布之間的相似性進(jìn)行表達(dá)。
KL散度可作為兩隨機(jī)變量之間的距離表征,能有效描述不同分布之間的相似性,在信息論中得到了廣泛應(yīng)用[15]。因此,本文中采用KL散度作為各駕駛員GMM之間的相似性度量,以實(shí)現(xiàn)對駕駛員進(jìn)行聚類。
3.1 KL散度
設(shè)原始隨機(jī)變量為X,信息瓶頸理論(information bottleneck,IB)通過引入附加變量Y來間接地確定X的距離度量,通常Y所描述的是與X相關(guān)的特征空間。IB算法的目標(biāo)為尋找X的聚類表示X^,使X^含有的信息量盡可能少,同時(shí)使Y包含的信息量最大化。其目標(biāo)是使所有特征分布與其所在類別的均值分布之間的KL散度之和最小。KL散度是兩個(gè)概率分布之間差異性的一種度量,分布f對g的KL散度定義為

假定當(dāng)前時(shí)刻得到某一類別駕駛數(shù)據(jù)的GMM分布為

待聚類駕駛員通過以下GMM進(jìn)行描述:

式中b和a分別表示分布g(x)和f(x)的基本高斯概率密度函數(shù)的個(gè)數(shù)。則該駕駛員與該類別統(tǒng)計(jì)分布之間的相似性通過KL散度進(jìn)行衡量為

式(11)沒有解析解,為此引入蒙特卡洛方法對上述兩個(gè)連續(xù)GMM分布之間的KL散度進(jìn)行近似。蒙特卡洛方法以采樣的方式從概率分布f中進(jìn)行采樣,每次以概率分布α隨機(jī)選擇其對應(yīng)的某一基本高斯分布,然后通過采樣獲得樣本點(diǎn)xi,組成樣本點(diǎn)集{xi}。據(jù)此,可以將KL散度的計(jì)算問題轉(zhuǎn)化為求取期望:

3.2 基于KL散度的非監(jiān)督聚類
參考k-means聚類框架,得到基于KL散度的非監(jiān)督聚類算法偽代碼如表3所示,其中分布gk代表相應(yīng)類別k在特征空間上的統(tǒng)計(jì)分布。該算法以最小化駕駛員特征分布與其所在類的統(tǒng)計(jì)分布之間的KL散度之和為目標(biāo)進(jìn)行聚類。

表3 基于KL散度的非監(jiān)督聚類算法
4 聚類結(jié)果
通過各GMM之間的KL散度能夠定量地表達(dá)駕駛員之間的差異性,如圖3所示。
圖中任一方格表示兩駕駛員之間的KL散度大小,如圖3(a)中(i,j)表示駕駛員i與駕駛員j之間的KL散度D(fifj)。在此選取10名駕駛員樣本為例,任意兩駕駛員之間的KL散度分布如圖3(b)所示。據(jù)此,能夠?qū)崿F(xiàn)不同駕駛員之間差異性的定量比較,為駕駛員習(xí)性聚類奠定基礎(chǔ)。
通過上述非監(jiān)督聚類方法,可將駕駛員駕駛習(xí)性聚類為3種類型。圖4為各類典型駕駛數(shù)據(jù)在相對距離-相對車速-主車加速度三維空間下的分布情況,為便于直觀理解不同類型駕駛數(shù)據(jù)的分布,對主車加速度與相對距離之間的關(guān)系作圖,如圖5所示。按照每類駕駛員在跟車過程中的相對距離和相對車速不同,可將3類駕駛員分別定義為激進(jìn)型、一般型和保守型。可以看出,保守型駕駛員在跟車過程中趨向于保持較大的相對車距,車輛加速度絕對值相對較小;而激進(jìn)型駕駛員的跟車間距較小,且加速度絕對值較大;一般型駕駛員的跟車行駛數(shù)據(jù)介于二者之間。
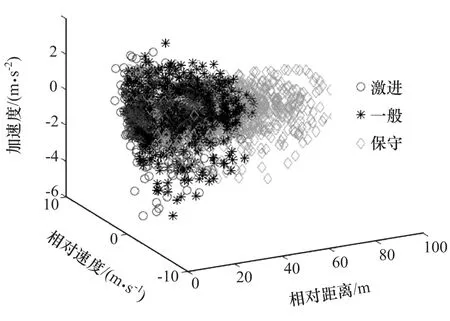
圖4 聚類后的相對車速-相對距離-加速度分布圖

圖5 聚類后的相對距離-加速度散點(diǎn)圖
圖6 為每種駕駛習(xí)性下的相對車速-相對距離百分比分布統(tǒng)計(jì)。由圖6可知:激進(jìn)型駕駛員的行駛車速相對較大,絕大部分情況下相對車速為負(fù)值;保守型駕駛員的行駛車速相對較小;一般型駕駛員介于二者之間。
3類駕駛員跟車過程中跟車距離與車速關(guān)系如圖7所示。圖中散點(diǎn)表示真實(shí)跟車數(shù)據(jù),可以看出車間距隨著車速的升高而增加。利用最小二乘法可得到3類駕駛員的2階車間距模型和固定時(shí)距車間距模型,分別如圖中的實(shí)線和虛線所示。如圖可見,3類駕駛員中,保守型駕駛員的跟車距離最遠(yuǎn),激進(jìn)型跟車距離最近。固定時(shí)距車間距模型與2階車間距模型的結(jié)果非常接近,而模型參數(shù)更少,有利于后續(xù)進(jìn)行ACC算法設(shè)計(jì)。

圖6 每種駕駛習(xí)性下的相對車速-距離統(tǒng)計(jì)分布
圖8 為各類駕駛員的跟車時(shí)距(定義為THW=s/vh)和主車加速度統(tǒng)計(jì)結(jié)果。圖中顯示了3類駕駛員跟車時(shí)距和加速度的第5百分位數(shù)、均值和第90百分位數(shù)。可以看出,從激進(jìn)型到保守型,3類駕駛員的跟車時(shí)距呈上升趨勢,平均跟車時(shí)距分別為1.6,2.0和3.1s。而在加速度統(tǒng)計(jì)方面,3類駕駛員的均值加速度都在0附近。但是激進(jìn)型駕駛員的最大減速度較大,而保守型駕駛員更趨于將車輛加速度控制在較小范圍內(nèi)。

圖7 跟車距離-車速關(guān)系圖
5 結(jié)論
提出了一種基于KL散度的駕駛員駕駛習(xí)性非監(jiān)督聚類算法。將每個(gè)駕駛員的實(shí)際駕駛數(shù)據(jù)視為一個(gè)高維連續(xù)高斯混合分布,并利用EM算法對其參數(shù)進(jìn)行估計(jì);以每個(gè)駕駛員統(tǒng)計(jì)分布模型與典型類別分布之間的KL散度作為其相似性的度量,據(jù)此對駕駛員進(jìn)行聚類。

圖8 各類駕駛員跟車時(shí)距和加速度統(tǒng)計(jì)
采集了84名隨機(jī)駕駛員的駕駛數(shù)據(jù),基于對聚類后各類別駕駛員駕駛數(shù)據(jù)的統(tǒng)計(jì)分析,將駕駛員分為激進(jìn)型、一般型和保守型3種類別,得到了各類駕駛員跟車距離和行駛車速的統(tǒng)計(jì)特點(diǎn)。
本文中提出的非監(jiān)督聚類方法優(yōu)勢在于:以GMM表達(dá)駕駛員的真實(shí)駕駛數(shù)據(jù)統(tǒng)計(jì)分布,基于不同分布之間的相似性實(shí)現(xiàn)聚類,而非以數(shù)據(jù)的單一數(shù)字特征作為聚類樣本,能夠?qū)︸{駛數(shù)據(jù)分布進(jìn)行總體考慮。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50
