衛(wèi)導(dǎo)輔助下的艦船捷聯(lián)慣導(dǎo)航行間粗對(duì)準(zhǔn)方法
2018-12-10 02:58:44奔粵陽(yáng)王翔宇陳海南楊立勝劉政浩
系統(tǒng)工程與電子技術(shù) 2018年12期
關(guān)鍵詞:方法
奔粵陽(yáng),孫 炎,王翔宇,陳海南,楊立勝,劉政浩
(1.哈爾濱工程大學(xué)自動(dòng)化學(xué)院,黑龍江 哈爾濱 150001;2.東北石油大學(xué)電氣信息工程學(xué)院,黑龍江 大慶 163318;3.沈陽(yáng)工業(yè)大學(xué)電氣工程學(xué)院,遼寧 沈陽(yáng) 110870)
0 引 言
捷聯(lián)慣性導(dǎo)航系統(tǒng)廣泛應(yīng)用在定位和姿態(tài)測(cè)量等領(lǐng)域,它根據(jù)其加速度計(jì)和陀螺儀的輸出,在初始位姿的條件下通過(guò)求解非線性微分方程,確定目標(biāo)的導(dǎo)航參數(shù)。作為一種航位推算系統(tǒng),捷聯(lián)慣導(dǎo)系統(tǒng)正常工作前需要進(jìn)行初始對(duì)準(zhǔn)獲取載體的初始姿態(tài)[1]。捷聯(lián)慣導(dǎo)系統(tǒng)在進(jìn)行導(dǎo)航工作前必須進(jìn)行初始對(duì)準(zhǔn),初始對(duì)準(zhǔn)的時(shí)間和精度直接影響慣導(dǎo)系統(tǒng)的工作性能[2-3]。因此,初始對(duì)準(zhǔn)提供的精確初始條件對(duì)于保證捷聯(lián)慣導(dǎo)系統(tǒng)的性能起到關(guān)鍵的作用[4-7]。
初始對(duì)準(zhǔn)的核心是確定載體系和導(dǎo)航系之間的姿態(tài)矩陣,捷聯(lián)慣導(dǎo)初始對(duì)準(zhǔn)一般分為粗對(duì)準(zhǔn)和精對(duì)準(zhǔn)兩個(gè)過(guò)程[8]。粗對(duì)準(zhǔn)以較快的速度粗略的確定出從載體坐標(biāo)系到導(dǎo)航坐標(biāo)系的初始捷聯(lián)矩陣,為精對(duì)準(zhǔn)作好準(zhǔn)備[9-10]。經(jīng)典的解析粗對(duì)準(zhǔn)方法是利用重力加速度和地球自轉(zhuǎn)角速度估計(jì)初始捷聯(lián)矩陣[10-12]。解析法的缺點(diǎn)是抗干擾能力差,僅適用于干擾較小時(shí)的靜基座初始對(duì)準(zhǔn)[13-14]。
但是,并不是情況都滿足靜基座的條件。例如,艦船在海風(fēng)和海浪的作用下,會(huì)產(chǎn)生姿態(tài)搖擺運(yùn)動(dòng)和線性位移運(yùn)動(dòng),這兩種運(yùn)動(dòng)導(dǎo)致艦船不是處于完全意義下的靜基座。這種情況下,姿態(tài)搖擺和線性位移運(yùn)動(dòng)產(chǎn)生了干擾量,使用經(jīng)典解析式粗對(duì)準(zhǔn)方法就不是最優(yōu)的選擇。因此,對(duì)于艦船在晃動(dòng)或者運(yùn)動(dòng)情況下完成粗對(duì)準(zhǔn)的研究是非常有意義的。文獻(xiàn)[15-16] 提出了一種基于慣性坐標(biāo)系參考基準(zhǔn)的初始對(duì)準(zhǔn)方法,但該文獻(xiàn)沒(méi)有給出具體實(shí)現(xiàn)細(xì)節(jié)。在文獻(xiàn)[17-18] 中給出了該類方法的具體形式,該方法能夠有效抑制載體晃動(dòng)對(duì)初始對(duì)準(zhǔn)的影響,適用于艦船在系泊和錨泊的對(duì)準(zhǔn)需求,但當(dāng)載體存在線運(yùn)動(dòng)情況時(shí),無(wú)法消除由于運(yùn)動(dòng)產(chǎn)生的加速度和角速度,從而會(huì)產(chǎn)生對(duì)準(zhǔn)誤差。文獻(xiàn)[19]在文獻(xiàn)[17] 的基礎(chǔ)上進(jìn)一步考慮了載體線運(yùn)動(dòng)的影響,將算法推廣到動(dòng)基座中去,利用外測(cè)速度補(bǔ)償了載體運(yùn)動(dòng)的影響[20],從而使捷聯(lián)慣導(dǎo)系統(tǒng)具備在動(dòng)基座條件下實(shí)現(xiàn)初始對(duì)準(zhǔn)的能力。相比于借助外測(cè)速度完成粗對(duì)準(zhǔn),本文提出的方法借助全球定位系統(tǒng)(global position system,GPS)獲得的位置信息實(shí)現(xiàn)粗對(duì)準(zhǔn),不需要裝備多普勒測(cè)速儀(Doppler velocity log,DVL)。另外,常規(guī)船都裝備有GPS。因此,借助GPS位置輔助實(shí)現(xiàn)粗對(duì)準(zhǔn)的方法成本更低、更具有實(shí)用性,使用范圍更具有一般性。
本文提出了一種艦船在航行間實(shí)現(xiàn)粗對(duì)準(zhǔn)的新方法,該方法利用GPS的位置信息,對(duì)艦船捷聯(lián)慣導(dǎo)姿態(tài)矩陣的計(jì)算方法做進(jìn)一步的研究。通過(guò)試驗(yàn)驗(yàn)證,該方法滿足艦船在航行間對(duì)粗對(duì)準(zhǔn)精度的要求。
1 坐標(biāo)系定義
文中所涉及到的坐標(biāo)系介紹如下:
(1) 地心慣性坐標(biāo)系(i系):原點(diǎn)在地球質(zhì)心,oxi軸在赤道平面內(nèi)且指向春分點(diǎn),ozi軸沿地軸方向指向北極,三軸構(gòu)成右手坐標(biāo)系;
(2) 地球坐標(biāo)系(e系):原點(diǎn)在地球中心,oxe軸在赤道平面內(nèi)且指向子午線,oze軸沿著地球自轉(zhuǎn)方向指向地球北極,三軸構(gòu)成右手坐標(biāo)系,地球坐標(biāo)系隨著地球的轉(zhuǎn)動(dòng)而轉(zhuǎn)動(dòng);
(3) 導(dǎo)航坐標(biāo)系(n系):原點(diǎn)在載體中心,選取“東-北-天”地理坐標(biāo)系作為導(dǎo)航坐標(biāo)系,;
(4) 載體坐標(biāo)系(b系):原點(diǎn)在載體中心,定義xb,yb,zb,指向載體的“右-前-上”方向。
2 解析粗對(duì)準(zhǔn)方法
(1)
M=g×ωie
(2)
于是,可以得出
(3)
對(duì)式(3)的等式兩端進(jìn)行轉(zhuǎn)置,并且寫成矩陣形式可得
(4)
其中,捷聯(lián)矩陣為正交矩陣[22],表示為
(5)
式(3)可以進(jìn)一步寫為
(6)
根據(jù)式(1)、式(2)可知
(7)
利用陀螺和加速度計(jì)輸出,得
(8)
將式(7)和式(8)代入式(6)有
(9)
式中,第一行向量為
第二行向量為
第三行向量為
3 動(dòng)基座粗對(duì)準(zhǔn)算法

(10)
(11)
式(11)等號(hào)兩邊同時(shí)求一重積分,其中t0為初始時(shí)刻,可得
(12)
(13)

圖1 時(shí)間區(qū)間示意圖Fig.1 Time interval diagram
因此,在時(shí)間區(qū)間(t1,t)內(nèi),式(13)可寫為
(14)

(15)
其中
(16)
由于
(17)

可知,式(16)可寫為
(18)
同理可知
(19)
艦船在水面航行,只涉及水平速度,不涉及天向速度,因此
(20)
式中,Sx1,Sx2分別表示在區(qū)間(t0,t1)和區(qū)間(t1,t)內(nèi),載體經(jīng)度變化換算成的地球表面的路程差;Sy1,Sy2分別表示在區(qū)間(t0,t1)和區(qū)間(t1,t)內(nèi),載體緯度φ變化換算成的地球表面的路程差。
將式(18)~式(20)代入式(15)可得
(21)
(22)
(23)
(24)
-ωieRtanK[cosφ(t)-cosφ(t1)]
(25)
-ωieRtanK[sinφ(t)-sinφ(t1)]
(26)
式中,R為地球半徑;K為艦船航向角;v(τ)為艦船航行速度;vx(τ),vy(τ),vz(τ)分別表示艦船航行速度在東-北-天3個(gè)方向的投影速度。

這里令
經(jīng)過(guò)整理,式(14)可寫為
(27)
在區(qū)間(t0,t1)內(nèi),令
于是
(28)
(29)

(30)

(31)
將式(31)代入式(28),整理后即得
(32)
(33)
由式(27)、式(32)和式(33),可得
(34)
本文提出的動(dòng)基座粗對(duì)準(zhǔn)方法執(zhí)行的算法過(guò)程如下:

步驟1通過(guò)對(duì)加速度計(jì)的輸出積分可計(jì)算At;通過(guò)式(21)~式(26)及對(duì)當(dāng)?shù)刂亓铀俣鹊姆e分可計(jì)算Bt。
同理,也可計(jì)算出At1,Bt1。


步驟4執(zhí)行步驟1,直到結(jié)束。
4 試驗(yàn)驗(yàn)證
為了驗(yàn)證本文提出的粗對(duì)準(zhǔn)方法的效果,設(shè)計(jì)了實(shí)驗(yàn)船的粗對(duì)準(zhǔn)試驗(yàn),實(shí)驗(yàn)比較了實(shí)驗(yàn)船在航行狀態(tài)下,經(jīng)典解析式粗對(duì)準(zhǔn)方法、速度輔助的粗對(duì)準(zhǔn)方法和本文所提粗對(duì)準(zhǔn)方法的性能優(yōu)劣。自研慣導(dǎo)系統(tǒng)的慣性傳感器性能指標(biāo)為:陀螺零偏穩(wěn)定性為0.01 (°)/h,加速度計(jì)常值偏差為1×10-4g。以從法國(guó)引進(jìn)的光纖陀螺捷聯(lián)慣導(dǎo)系統(tǒng)組合導(dǎo)航系統(tǒng)作為姿態(tài)參考的基準(zhǔn),使用時(shí)PHINS處于慣導(dǎo)與GPS組合導(dǎo)航狀態(tài),可以提供高精度的姿態(tài)信息(誤差不超過(guò)0.01°)。本次試驗(yàn)的PHINS與自研慣導(dǎo)系統(tǒng)的安裝圖如圖2所示。

圖2 實(shí)船試驗(yàn)系統(tǒng)安裝圖Fig.2 Systems installation figure for vessel test
該實(shí)驗(yàn)分析比較試驗(yàn)船在航行狀態(tài)下,完成粗對(duì)準(zhǔn)的情況。實(shí)驗(yàn)船在航行中,一共進(jìn)行了20次試驗(yàn)。每次經(jīng)典解析式粗對(duì)準(zhǔn)方法、速度輔助的粗對(duì)準(zhǔn)方法和本文提出的粗對(duì)準(zhǔn)方法的運(yùn)行時(shí)間均為180 s。每次試驗(yàn),把PHINS組合導(dǎo)航系統(tǒng)的輸出作為姿態(tài)參考值,將這3種方法輸出的姿態(tài)分別與姿態(tài)參考值作比較。因此,可分別得到這3種粗對(duì)準(zhǔn)方法的縱搖、橫搖、航向誤差。通過(guò)試驗(yàn),測(cè)試這3種粗對(duì)準(zhǔn)方法的性能。將20次試驗(yàn)的姿態(tài)角誤差,經(jīng)Matlab繪圖后,可得經(jīng)典解析式粗對(duì)準(zhǔn)的對(duì)準(zhǔn)誤差如圖3~圖5所示,速度輔助的粗對(duì)準(zhǔn)方法的對(duì)準(zhǔn)誤差如圖6~圖8所示和本文提出的粗對(duì)準(zhǔn)方法的對(duì)準(zhǔn)誤差如圖9~圖11所示。

圖3 解析式粗對(duì)準(zhǔn)方法縱搖估計(jì)誤差Fig.3 Pitch estimation error for analytic coarse alignment
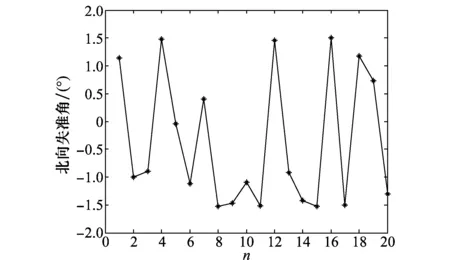
圖4 解析式粗對(duì)準(zhǔn)方法橫搖估計(jì)誤差Fig.4 Roll estimation error for analytic coarse alignment

圖5 解析式粗對(duì)準(zhǔn)方法航向估計(jì)誤差Fig.5 Yaw estimation error for analytic coarse alignment
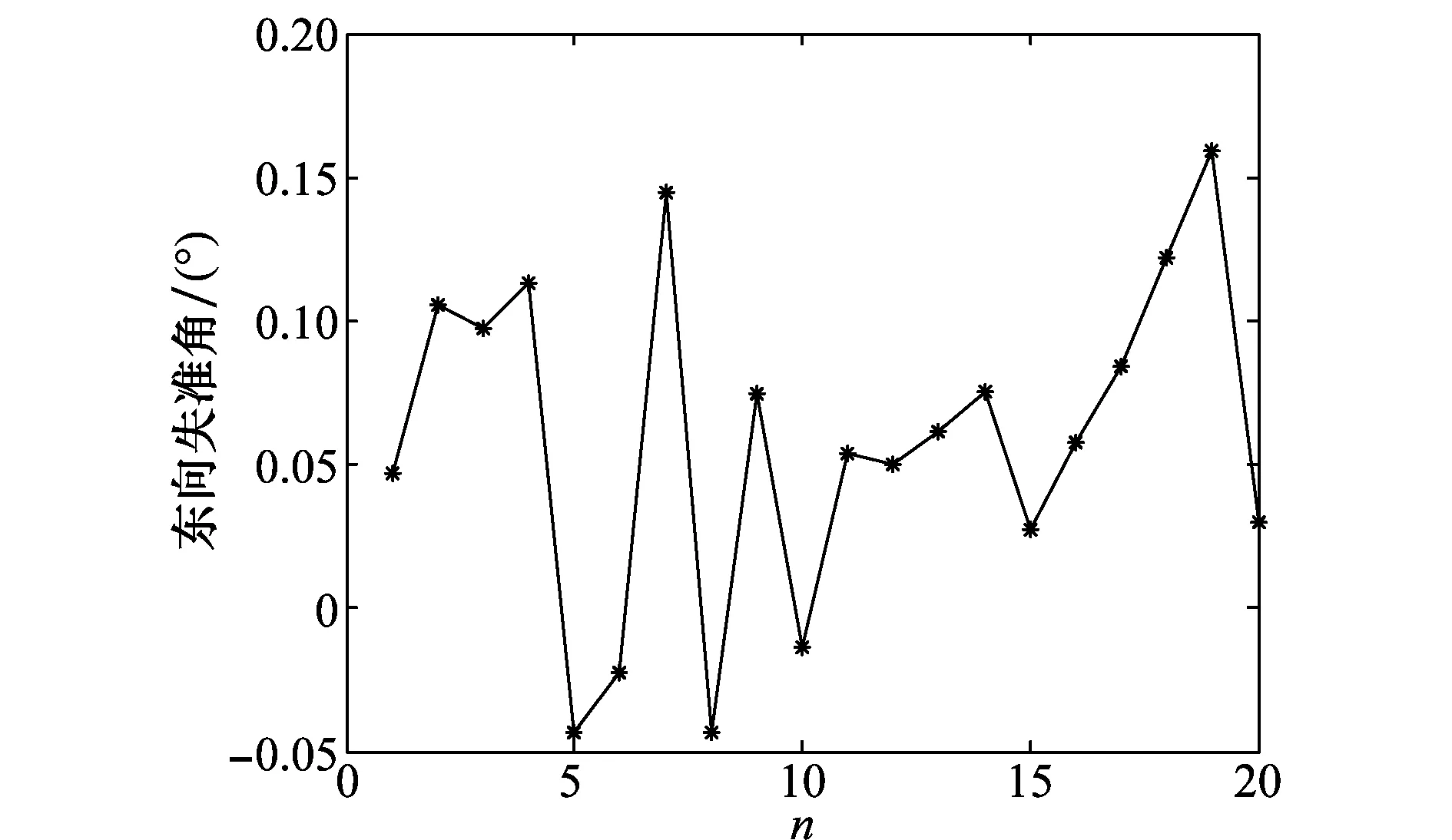
圖6 速度輔助粗對(duì)準(zhǔn)方法縱搖估計(jì)誤差Fig.6 Pitch estimation error for coarse alignment aided by velocity

圖7 速度輔助粗對(duì)準(zhǔn)方法橫搖估計(jì)誤差Fig.7 Roll estimation error for coarse alignment aided by velocity

圖8 速度輔助粗對(duì)準(zhǔn)方法航向估計(jì)誤差Fig.8 Yaw estimation error for coarse alignment aided by velocity
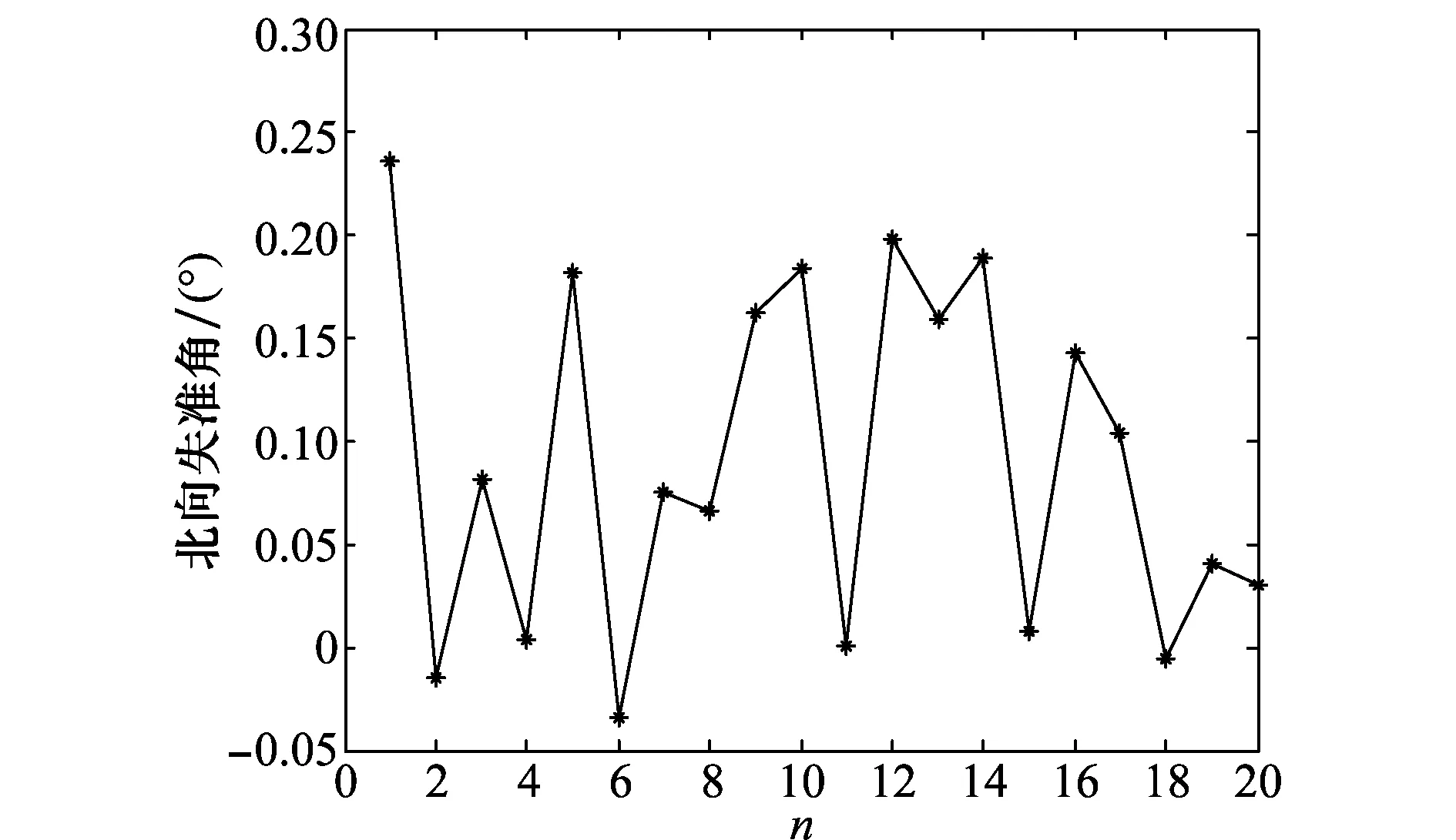
圖10 本文所提粗對(duì)準(zhǔn)方法橫搖估計(jì)誤差Fig.10 Roll estimation error for coarse alignment proposed in this paper

圖11 本文所提粗對(duì)準(zhǔn)方法航向估計(jì)誤差Fig.11 Yaw estimation error for coarse alignment proposed in this paper
通過(guò)圖3~圖5可得:當(dāng)艦船處于航行狀態(tài)時(shí),解析式粗對(duì)準(zhǔn)方法的水平估計(jì)誤差約為1.5°,航向估計(jì)誤差約為33°。通過(guò)圖6~圖8可得:當(dāng)艦船處于航行狀態(tài)時(shí),速度輔助的粗對(duì)準(zhǔn)的縱搖估計(jì)誤差約為0.17°,橫搖估計(jì)誤差約為14.28°,航向約為0.79°。通過(guò)圖9~圖11可得:當(dāng)艦船處于航行狀態(tài)時(shí),本文所提的粗對(duì)準(zhǔn)方法的估計(jì)誤差水平約為0.23°,航向估計(jì)誤差約為0.63°,滿足了捷聯(lián)慣導(dǎo)系統(tǒng)對(duì)粗對(duì)準(zhǔn)的精度要求。
5 結(jié) 論
本文設(shè)計(jì)了一種采用由GPS位置信息輔助艦船捷聯(lián)慣導(dǎo)系統(tǒng)在航行中實(shí)現(xiàn)粗對(duì)準(zhǔn)的方法。該方法利用GPS獲得的位置信息,通過(guò)對(duì)捷聯(lián)慣導(dǎo)系統(tǒng)基本方程的數(shù)值積分,計(jì)算初始捷聯(lián)姿態(tài)矩陣。該方法借助GPS,成本低、具有實(shí)用性、具有普適性。最后,經(jīng)過(guò)試驗(yàn)驗(yàn)證,該方法能使艦船捷聯(lián)慣導(dǎo)系統(tǒng)在航行中快速的計(jì)算出初始捷聯(lián)矩陣,且水平誤差角小于1°,航向誤差角小于3°,滿足后續(xù)精對(duì)準(zhǔn)過(guò)程提供初始值的精度要求。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56