一種解決多個讀寫器電磁干擾的有效方法
2018-12-07 08:31:54,
單片機與嵌入式系統應用 2018年11期
關鍵詞:信號
,
(天津科暢慧通信息技術有限公司,天津 300399)
引 言
射頻識別系統包括標簽和讀寫器。射頻識別技術是一種非接觸式的自動識別技術,它通過射頻信號對目標對象進行射頻識別,并向目標對象獲取相關數據。這種識別操作無須人工干預,可應用于各種惡劣環境,同時射頻識別技術可以對高速運動的物體進行識別,且可同時對多個標簽進行識別,操作起來方便快捷。
現有的射頻識別系統包括:無源射頻識別系統和有源射頻識別系統,兩者的本質區別在于前者的標簽從讀寫器的發射波形中獲取能量,后者的標簽自身具有能源供應。
在無源射頻識別系統中,射頻識別系統的沖突包括讀寫器信號沖突和標簽信號沖突。針對標簽側沖突,ISO18000-6B/C協議、國標協議的防碰撞算法都明確給出了解決標簽的碰撞問題。而讀寫器側的碰撞,由于標簽是無源的,沒有防讀寫器碰撞機制,因此在多讀寫器環境下同時向同一標簽發射信號時,標簽無法解碼碰撞的讀寫器信息,造成讀寫器無法識讀到標簽。
1 讀寫器碰撞場景分析
1.1 載波同向
圖1 兩讀寫器載波同向干擾示意圖
如圖1所示,R1和R2是2個相鄰讀寫器,當兩個讀寫器同時工作時,其電磁場存在相互重疊的部分,即A區域。在此區域的標簽,存在漏讀的可能。這是因為若讀寫器R1和R2同時工作,在A區域的標簽因為同時收到R1和R2的射頻信號,這兩個讀寫器的射頻信號相互疊加,使得標簽解調后的基帶波形因相互疊加而變形,造成標簽側譯碼錯誤。因此標簽無法識別讀寫器的空口指令,造成讀寫器R1和R2均無法識讀該標簽。
另一種可能引起漏讀的情況是:當R1和R2分時發射電磁波,但處于相同的session中時,R1識讀到重疊區A的標簽,當R1結束識讀后關閉電磁波,此時R2開啟電磁波,造成標簽無法掉電。因此在讀寫器R1下一輪識讀時,因為標簽時隙計數器值很大,無法識讀到標簽。同理,讀寫器R2也存在無法識讀到標簽的情況。
1.2 載波相對
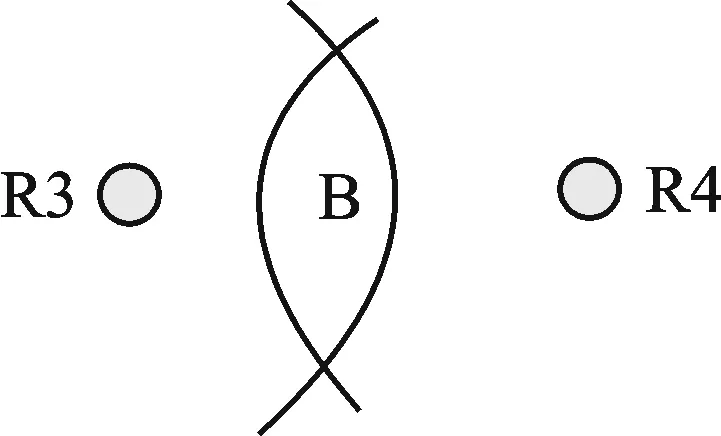
圖2 兩讀寫器載波相對干擾示意圖
如圖2所示,讀寫器R3和R4相互朝對方發射電磁波,此時重疊區域是B。當R3和R4同時發射載波時,載波信號會相互疊加。在B區域內的標簽同樣會因為信號相互疊加變形而無法正確譯碼,造成讀寫器R3和R4識讀標簽失敗。
當R3和R4不同時發射載波,但處于相同的session中時,R3識讀到B區域的標簽,關閉載波,此時R4發射載波,由于B區域內標簽沒有掉電,標簽時隙計數器值很大而無法識讀到該標簽。
2 讀寫器防碰撞方法
傳統解決干擾的方法主要有三種:時分復用(TDMA)、頻分復用(FDMA)、碼分復用(CDMA) 。
TDMA為時分多址技術,其是把時間分割成周期性的幀,每一個幀再分割成若干個時隙,在滿足定時和同步的條件下,發送端發出的信號都按順序安排在預定的時隙中傳輸,各接收端只要在指定的時隙內接收,就能在合路的信號中把發給它的信號區分并接收下來而不混擾。
FDMA為頻分多址技術,通過把通信系統的總頻段劃分成若干個等間隔的頻道分配給不同的設備,由于各設備占用不同的頻率,即采用不同的載波頻率,接收時通過濾波器選取特定頻段的信號并抑制無用干擾,從而接收到正確信號。
CDMA為碼分多址技術,其原理是將需傳送的具有一定信號帶寬信息的數據用一個帶寬遠大于信號帶寬的高速偽隨機碼進行調制,使原數據信號的帶寬被擴展,再經載波調制并發送出去。接收端使用完全相同的偽隨機碼,與接收的帶寬信號作相關處理,把帶寬信號換成原信息數據的窄帶信號即解擴,以實現信息通信。
上述多址機制不能直接應用在射頻識別系統中,這是因為:
① 在FDMA 方式中, 讀寫器使用不同的頻率和射頻標簽通信。由于射頻標簽沒有頻率調諧電路, 因此射頻標簽不能選擇一個特定的讀寫器與其通信。如果射頻標簽增設頻率調諧電路功能, 將大大增加射頻標簽的成本, 因此FDMA不適合應用在射頻識別系統中。
② 在TDMA 方式中, 讀寫器被分配不同的時隙, 以避免讀寫器同時詢問/發送射頻信號。這就要求讀寫器之間互聯互通,并且有一定的算法。在移動式網絡中, 沒有干擾的讀寫器因為相互靠近而出現干擾, 需要重新分配時隙。動態分配時隙降低了RFID 系統識讀速率。
③ 在CDMA方式中,要求電路上有更為復雜的標簽電路, 標簽的使用數量往往非常大,考慮到成本因素,標簽電路應該盡量簡單, 所以一般不會采用CDMA。
3 系統設計
3.1 設計思想
圖3 讀寫器干擾解決方案示意圖
如圖3所示,讀寫器1連接天線A和天線B,讀寫器2連接天線C和天線D。其中天線A對應車道1,天線B對應車道2,天線C對應車道3,天線D對應車道4,天線B和天線C是不同讀寫器的相鄰天線,存在相互干擾的情況。
為了讓讀寫器1和讀寫器2互不干擾,需要將二者完全分時工作。本文給出了一種設計思想,通過讀寫器的GPIO端口協調兩臺相鄰車道的讀寫器分時工作,具體就是用一根線連接讀寫器1和讀寫器2的GPIO端口。這根線起到為兩臺讀寫器通信的作用,代表讀寫器的空閑和工作兩種狀態,比如低電平表示空閑,高電平表示工作。
每臺讀寫器都在同時工作,但是當工作天線是兩個讀寫器相鄰車道的天線(簡稱碰撞天線)時,就需要判斷另一臺讀寫器碰撞天線的狀態(空閑或者工作)。若另一臺讀寫器空閑,則可以下發標簽識讀指令,否則需要等待,直到另一臺讀寫器碰撞天線狀態為空閑。當然,等待需要有個超時時間,不然就會存在一臺讀寫器一直工作、另一臺讀寫器不工作的情況。超時時間的數值可以根據實際應用場景設定。
3.2 設計流程
圖4給出了解決讀寫器相互干擾的具體流程。流程如下:
① 當前讀寫器開啟一輪識讀時,首先判斷當前天線是否是另一臺讀寫器的碰撞天線,若不是,則進入正常的識讀流程。
② 若當前天線是另一臺讀寫器的碰撞天線,需要獲取連接兩臺讀寫器的GPIO電平,這里假設低電平表示另一臺讀寫器處于空閑狀態,高電平表示另一臺讀寫器處于工作狀態。
③ 若GPIO電平為低電平,說明另一臺讀寫器的碰撞天線處于空閑態,需要配置該端口GPIO為高電平,表示當前讀寫器在工作狀態,同時設置工作超時定時器,以防止當前讀寫器一直工作下去。開始下發識讀指令,獲取標簽信息。若當前天線識讀完畢或者工作超時,定時器時間到,配置GPIO為低電平,表示當前天線工作完畢,狀態是空閑態。
④ 若GPIO電平為高電平,此時說明另一臺讀寫器碰撞天線處于工作態,需要不斷查詢GPIO電平,直到電平變成低電平,說明另一臺讀寫器碰撞天線停止工作,當前讀寫器可以啟動工作。再重復步驟③。
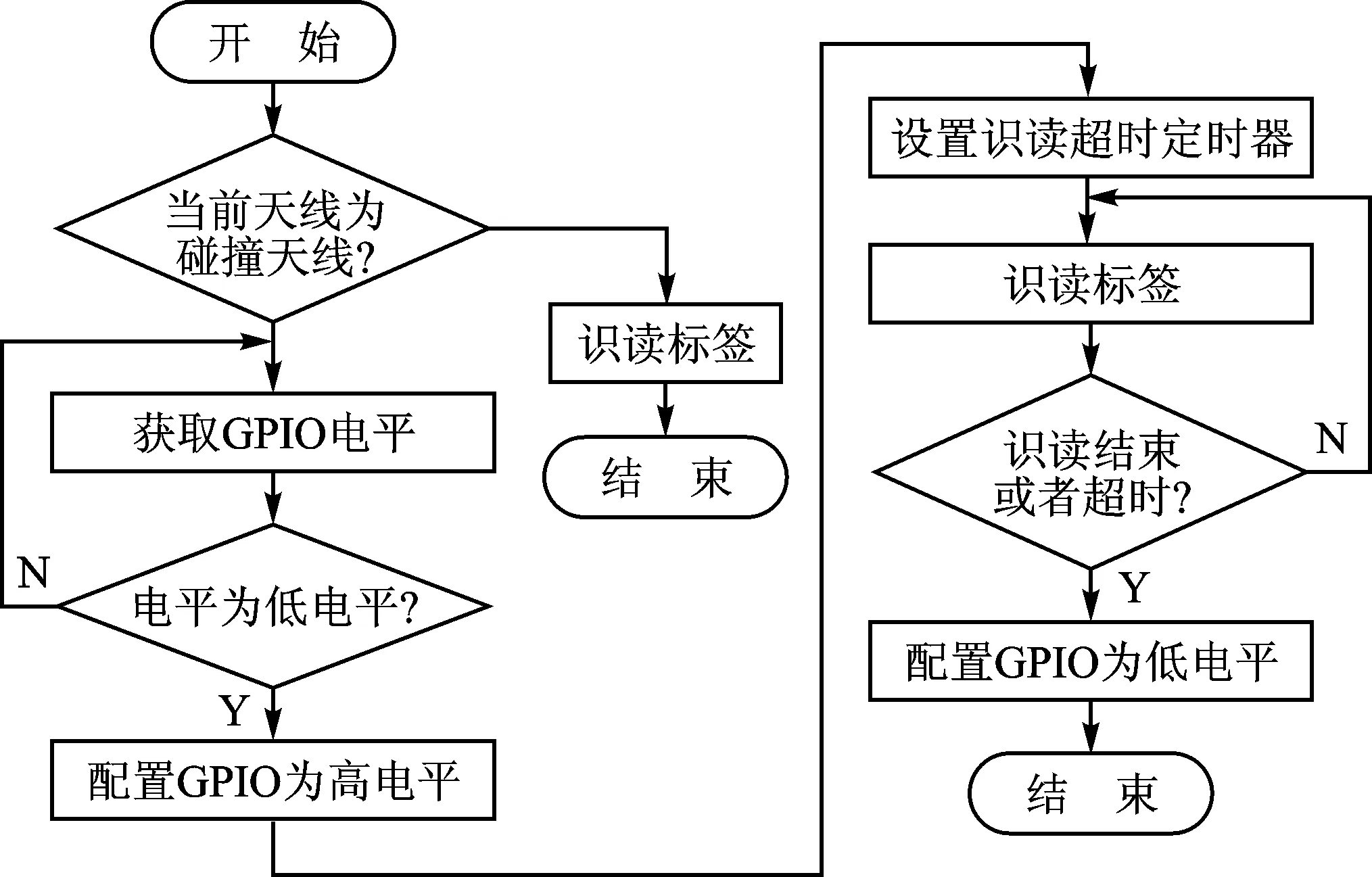
圖4 讀寫器相互干擾解決方案流程圖
4 實驗結果及分析
實驗環境框圖如圖2所示,準備兩臺超高頻讀寫器,工作頻率為922 625 MHz,空口協議采用EPC協議,前反向速率分別是80 kbps和160 kbps,反向編碼方式是FM0。每臺讀寫器連接一個天線,天線發射電磁波方向相向。在兩天線電磁場的重疊區放置一個射頻標簽,分別對比了使用本文第3節解決方案前后讀寫器的識讀情況,對比數據如表1所列。
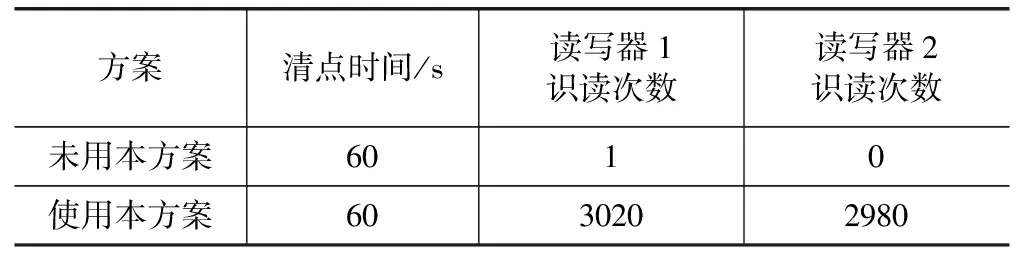
表1 讀寫器使用本方案前后識讀次數對比圖
從表1給出的實驗結果可以看出:使用本方案后,讀寫器1和讀寫器2均能識讀到重疊區標簽,相比未用本方案的實驗結果,可以看出大大提高了識讀成功率,規避了標簽漏讀情況,完全解決了讀寫器相互干擾而無法識讀重疊區標簽的問題。這說明讀寫器輪動工作,相當于先進行沖突檢測,在沒有沖突的情況下,再進行識讀操作,大大提高了識讀成功率。
結 語

猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06