靜止狀態下的多相感應電機參數辨識方法
2018-12-07 05:51:24鄭仕達楊家強
大電機技術 2018年6期
鄭仕達,楊家強
?
靜止狀態下的多相感應電機參數辨識方法
鄭仕達,楊家強
(浙江大學,杭州 310027)
在多相感應電機非對稱T型等效電路的基礎上,提出了一種靜止狀態下的參數辨識方法。考慮到低壓大功率多相感應電機的參數較常規三相感應電機小,為避免逆變器非線性和補償誤差,采用直接測量相電壓的方法代替電壓重構法,可以準確辨識出電機的全部參數。針對勵磁電感在數值上僅為幾毫亨,對采樣誤差較為敏感的問題,勵磁電感的辨識采用低頻交流注入和突減電流兩種方法互相校核。最后通過實驗驗證了該方法的有效性。
參數辨識;靜止狀態;低壓大功率;多相感應電機
0 前言
多相電機相比三相電機具有更小的轉矩脈動、更好的容錯控制性能,在電壓受限的場合可以實現低壓大功率[1,2],越來越多地在工業控制、交通運輸等領域得到應用,前景廣闊[3]。
與三相電機控制相似,多相感應電機的矢量控制等高性能算法需要在磁鏈、速度的觀測上獲得準確的參數,以確保電機的運行性能。傳統的參數辨識方式通過空載和堵轉實驗獲得[4],但是對于已經安裝到機電系統上,負載難以脫除的電機,傳統的空載、堵轉實驗無法實現。因此有必要對靜止狀態下的電機參數辨識進行研究。
本文的研究對象為電動汽車用的七相感應電機,專門為低壓大功率場合定制。較一般三相電機而言,在相同磁通條件下,每相等效串聯匝數很小,故待辨識的勵磁電感很小(約幾毫亨),采用文獻[5]的方法用對直流母線電壓重構后的電壓作為相電壓,需要補償IGBT和二極管的壓降,補償的準確性較差。故針對這類勵磁電感較小的多相電機,本文增加了一個電壓傳感器直接獲得相電壓值,辨識靜止狀態下的定轉子電阻、漏感、勵磁電感參數,針對較小的勵磁電感,采用低頻交流注入和突減電流兩種方法來互相校核。最后,電機參數的辨識結果與解析解和有限元仿真解進行對比,驗證了方法的有效性。
1 多相感應電機參數辨識模型
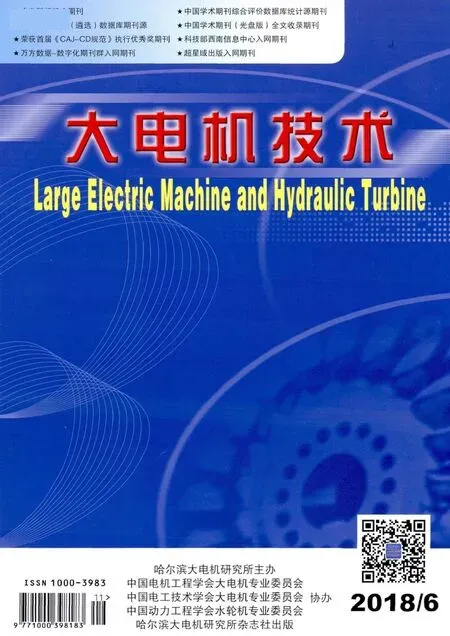
非對稱T型等效電路(也稱反Г型等效電路)常用于各種電機控制算法中,如圖1所示。
u、i分別為電機相電壓和相電流;u、i分別為勵磁繞組端電壓和勵磁電流;R為定子電阻,為漏感,為轉子電阻,為勵磁電感。其中轉子電阻已折算到定子側,、考慮其磁飽和等非線性因素,分別與定子電流i和勵磁電流i有關,可以表示為(i)、(i)[6]。
本文對七相感應電機參數辨識的依據就是圖1模型。首先進行定子電阻和漏感的辨識,接下來利用定子電阻和漏感的值,完成轉子電阻和勵磁電感的辨識。
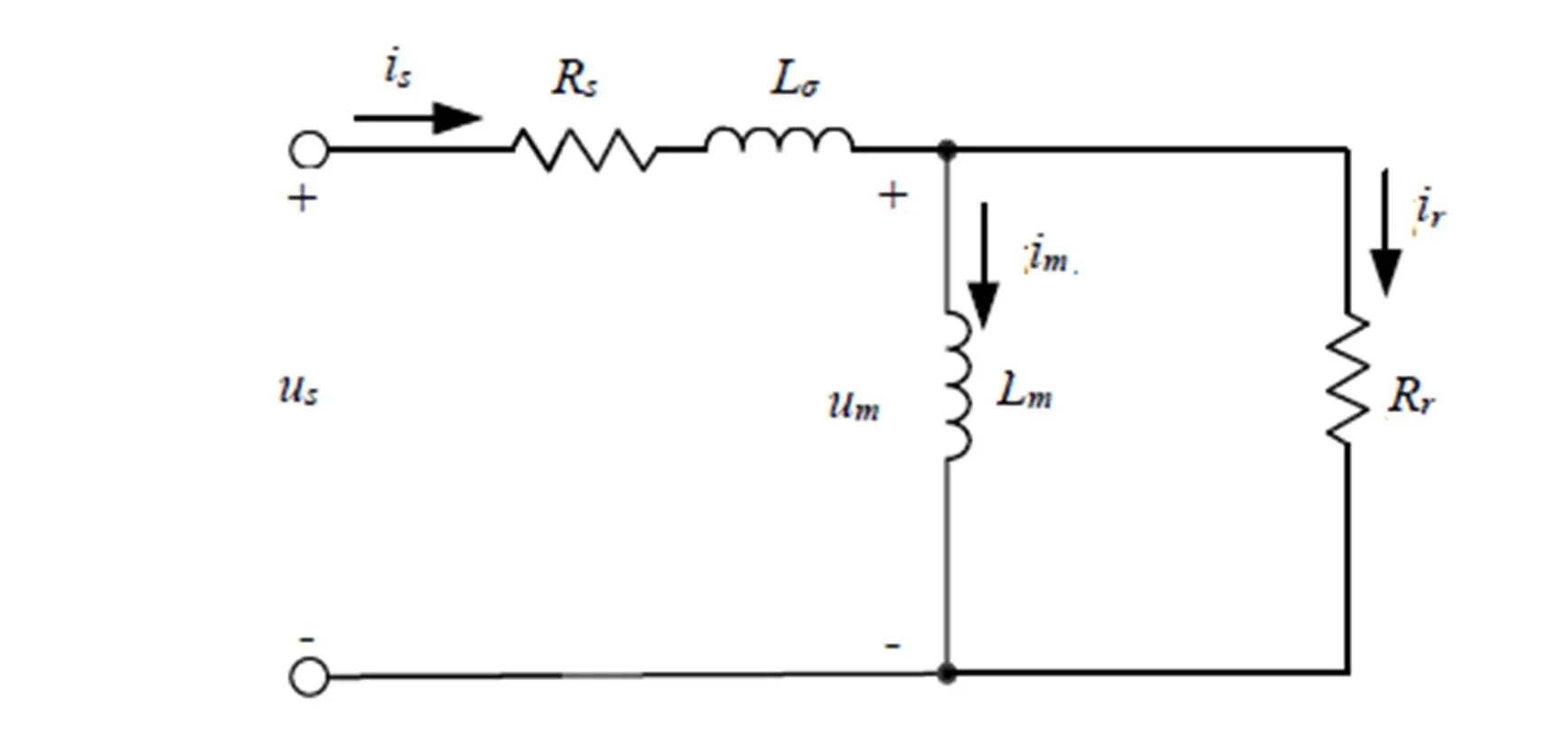
圖1 感應電機非對稱T型等效電路
2 定子電阻和漏感的辨識
2.1 直流伏安法辨識定子電阻
定子電阻一般采用直流伏安法獲得,通過電流閉環控制,使某相中通入給定直流電流,此時電機內部不產生旋轉磁場,電機處于靜止狀態。通過電壓傳感器獲得相的電壓和電流傳感器獲得的相電流,可以計算得到定子電阻為:

式中,和分別為相繞組上的直流電壓和相電流。由于電壓傳感器直接測量相電壓,故逆變器的非線性因素無需考慮。
2.2 高頻注入法辨識漏感
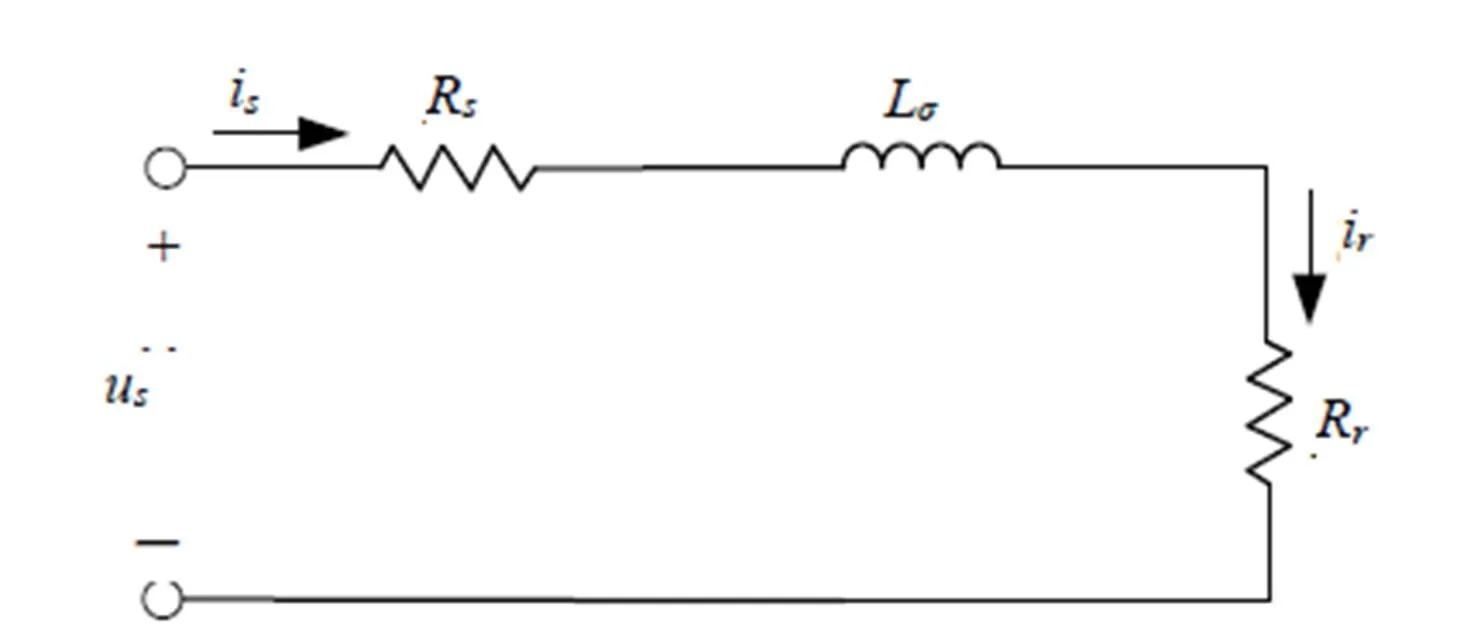
圖2 感應電機漏感辨識的交流等效電路
向繞組中注入給定電流波形,測得相繞組兩端電壓波形:
式中,()為給定電流,包含了i0直流偏置分量和icos()的交流小信號,u()為繞組兩端的電壓,包含了u0直流偏置分量和ucos()的交流小信號。則漏感可以直接由下式計算得到:
由于這種方法計算出來的漏感,包括之后辨識的勵磁電感,均為瞬態電感[8](記為(ins)),是實際工作點P附近磁鏈關于電流的微分d/d:
對瞬態電感關于電流積分,得到磁鏈-電流曲線,如圖3所示:

實際應用中,對于某一個磁路工作點=(i0,Ψ0),靜態電感(act)可以由式(6)得到。

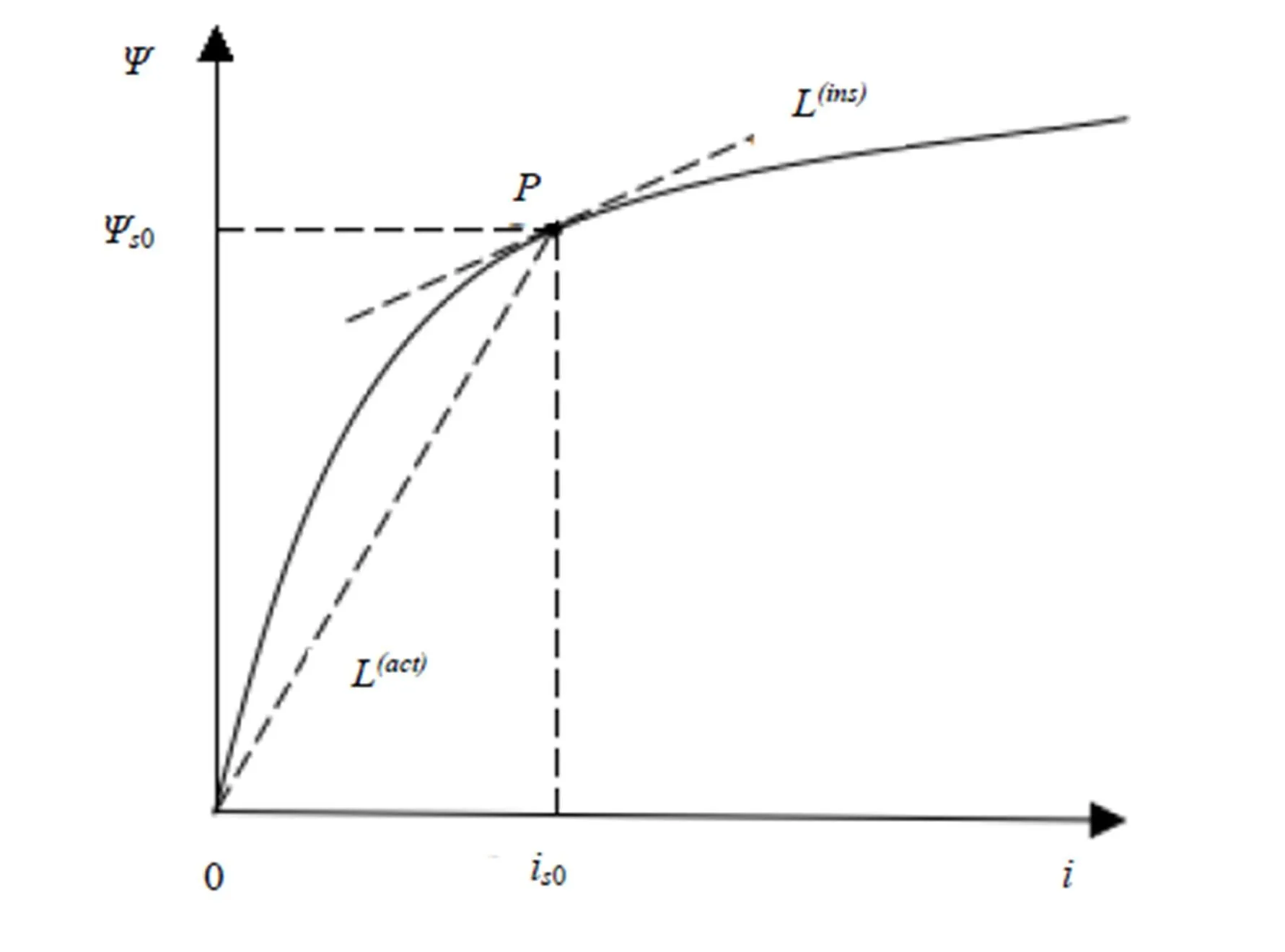
圖3 磁鏈-電流曲線上的瞬態電感和靜態電感
值得一提的是,公式(2)中的ucosα/i并不能得到真正意義上的轉子電阻。因為電機在正常運行狀態下轉子電流頻率很小,為轉差頻率,但漏感辨識實驗中通入的交流量頻率較高,這樣運算得到的是高頻轉子電阻,無法在控制中使用,需要進一步辨識。
3 轉子電阻和勵磁電感的辨識
3.1 交流注入法辨識轉子電阻
轉子電阻的辨識方法與漏感相似,都是向相繞組中通入含交流小信號的直流分量*()=i0+icos(ωt),直流電流用于選定穩態工作點,交流小信號幅值很小。考慮到轉子電流在電機運行過程中與定子電流存在轉差頻率的頻率差,靜止狀態下轉子固定,為準確得到不同轉差率下的轉子電阻,交流小信號頻率設定為使轉差率從0.1開始一直到1的值。在這樣的輸入條件下,參數辨識的等效電路與圖1相同。于是有:
u=u-i(R+jωL) (7)
且:
上兩式中,u為圖1等效電路中勵磁繞組兩端電壓幅值,u和i分別為相繞組上的電壓和電流的交流分量幅值,R和L為前文方法辨識獲得的參數,為u和i之間的相位角。通過對采集到的電壓電流數據進行FFT分析,取出基波分量,計算出相位角,便可以通過式(8)得到轉子電阻的辨識值。
3.2 低頻注入法辨識勵磁電感
基于轉子電阻辨識的方法,將交流小信號的頻率設置為額定轉差頻率ω0,本文中選取ω0=1Hz,改變相電流大小進行辨識實驗。由于定子電阻和漏感已經辨識得到,那么勵磁電感也可以類似得到:

與漏感相同,式(9)計算出來的電感也是瞬態電感,實際應用中,需要將勵磁電感關于電流積分,在磁鏈-電流曲線上計算靜態電感。
3.3 突減電流法辨識勵磁電感
對于每相串聯匝數小、電壓低、頻率高的電機,勵磁電感非常小。為減小辨識誤差,本文額外采用突減電流法來與低頻注入法的結果進行比對校驗。
眾所周知,對于定子線圈而言,定子自感等于自感磁鏈與其勵磁電流的比值,也可以寫為:
Ψ=Li(10)
向相繞組中通入直流電流i,靜止狀態下轉子中沒有感應電流,電機內的磁鏈全為定子磁鏈。考慮到反電勢為磁鏈的變化率,改寫為積分形式如下:

上式中,Ψ(0)為直流激勵下的穩態磁鏈。當突減電流給定為0,電流i()會隨著時間迅速減小,電壓u()會受到定子自感反電勢的影響產生一個負向的電壓脈沖。當i()和u()同為零時,式(11)中(u()-Ri())所代表的反電勢項為0,此時為1時刻,定子磁鏈Ψ(1)=0。即穩態定子磁鏈可以通過式(12)計算得到:

從電流給定為0開始,一直積分到電壓電流均小于A/D采樣的分辨率,計算得到穩態定子磁鏈,根據式(13)即獲得勵磁電感。

4 實驗結果及其分析
驗證本文方法的多相感應電機基本數據見表1,采用基于Speedgoat高性能實時目標機的多相電機控制柜完成整個靜止狀態下的參數辨識,實驗平臺如圖4所示。
表1 七相感應電機基本數據

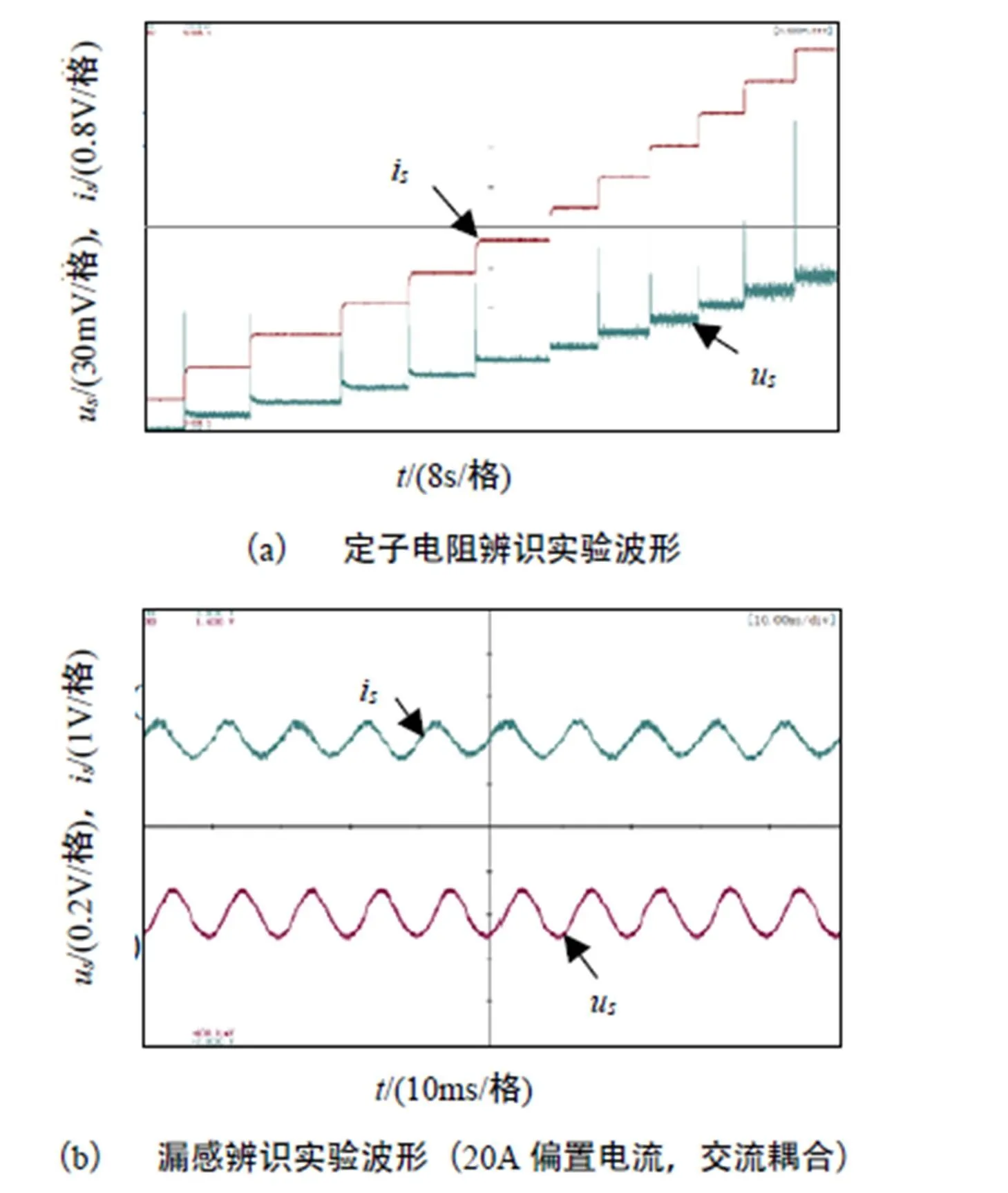
參數辨識實驗采用電流閉環控制,在定子電阻的辨識實驗中,每個電流值計算5次,取平均值作為該電流下的定子電阻辨識值。
在漏感的辨識實驗中,交流小信號在10A以下時給定0.5A的幅值,其他電流下均為1A的幅值。錄波儀設置為交流耦合,并且選取200kS/s的采樣率,使每個周期內有2000個點可供計算。選取波形中的5個周期進行FFT分析,計算后得到漏感的辨識值。考慮到漏感與定轉子相對位置有關,在不同轉子位置上進行5組實驗。
交流注入法和低頻注入法均選取5個周期進行FFT分析,計算得到轉子電阻和勵磁電感的辨識值。對于突減電流法,從給定電流為0開始積分,直到電壓電流均小于測量靈敏度結束,并計算出相應的勵磁電感。實驗波形如圖5所示。
本文七相感應電機針對低壓大功率電動汽車驅動場合,基于ANSYS有限元仿真軟件進行電機本體設計,如圖6所示。故通過實驗辨識結果與有限元參數計算結果相對比,可以檢驗辨識方法的準確性。實驗結果及對比如圖7所示。
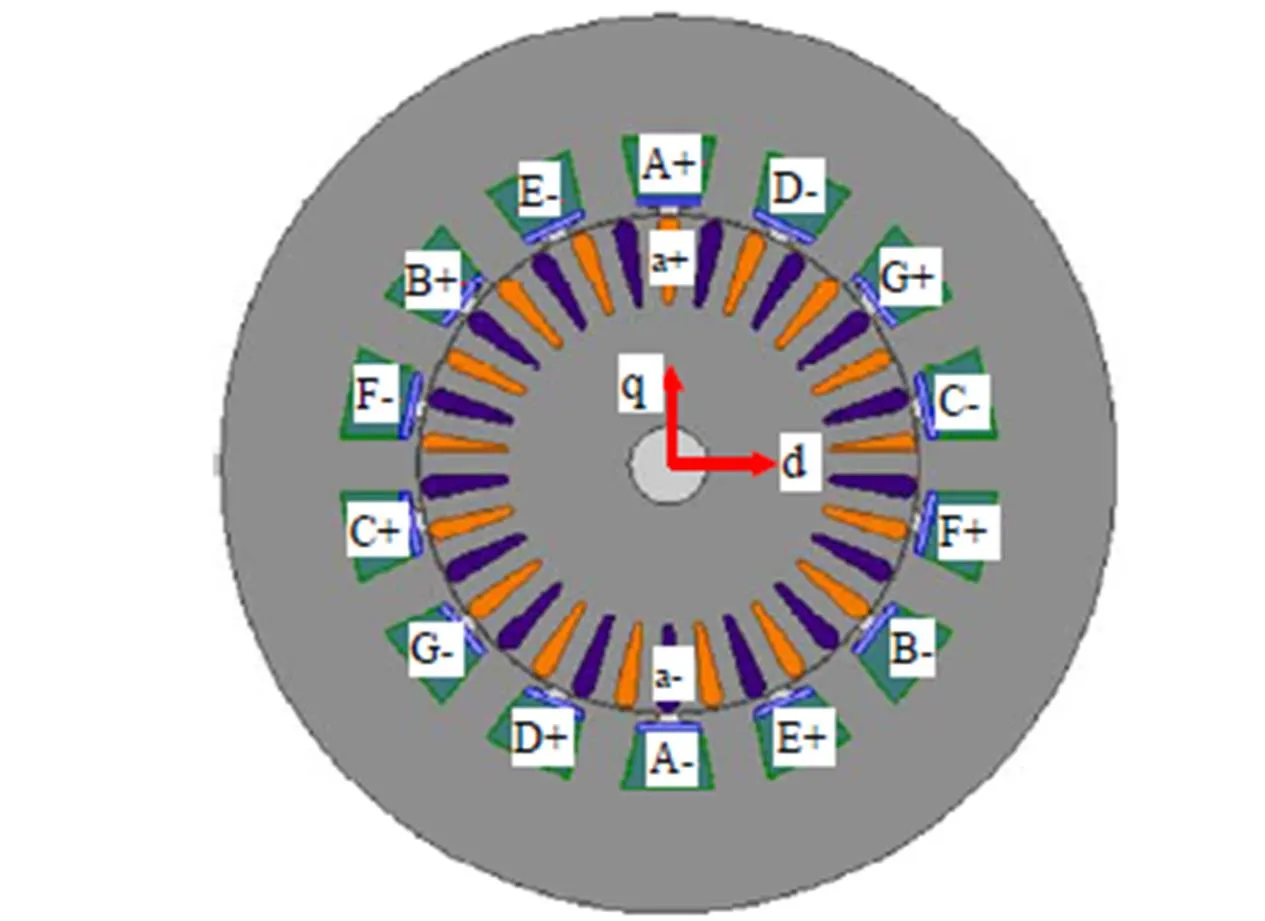
圖6 七相感應電機有限元設計及計算模型

圖7 七相感應電機參數辨識結果
從圖7中可以得到如下結論:
(1)定子電阻隨電流變化非常小,但是仍然由于發熱有少量的增大。如果對電機控制性能要求較高,在電機運行過程中可以結合在線辯識算法修正定子電阻參數,提高控制性能;
(2)隨著電流增大,漏感減小,并且趨于飽和,這是由于轉子為閉口槽,在電流較小的情況下,磁力線大多從轉子槽口形成閉合回路,漏感相對較大,在轉子槽口磁密隨電流增大飽和后,漏感減小,之后相對保持不變。另外,在轉子位置不同的情況下,定子槽對轉子槽、定子齒對轉子槽所構成的磁路不同,在電流較小時對應的漏感有較大的差別。一般電機在正常運行下,定轉子相對位置變化很快,漏感可以參考圖7(b)的虛線,即最大與最小的平均值。極低速運行下(<10r/min)需要考慮漏感隨轉子位置的變化;
(3)轉子電阻隨轉差率的增大而增大,近似呈線性關系,起動或者調速的過程中,可以對應實時的轉差率選取對應位置的轉子電阻,以獲得更好的調速效果;
(4)圖7(d)中顯示了兩種方法測得的勵磁電感,并且與有限元計算結果相互校驗。為綜合考慮兩種方法的計算結果,本文采用最易操作的平均值方法。可以看出平均勵磁電感曲線較兩種方法各自的曲線與有限元法更加吻合,且平均誤差更小。
實驗測得的電感參數為瞬態電感,圖7中已經將電感的結果進一步表示為靜態電感。
對于七相感應電機,除上述基波平面的參數外,還有三次、五次諧波平面的參數,主要體現在漏感和勵磁電感上。三次和五次諧波平面的電感一般取對應基波參數的1/9和1/25。
5 結論
本文以18.5kW七相感應電機為例,設計了靜止狀態下參數辨識的方法。通過將實驗結果與有限元計算結果相對照,本文方法能夠有效并準確地辨識出多相感應電機非對稱T型等效電路下的全部參數。并且低頻注入法和突減電流法兩種方法相互校驗來辨識勵磁電感,可以提高勵磁電感辨識的準確性,解決了低壓大功率電機因勵磁電感過小而導致辨識不準的問題。最后辨識結果提供了參數隨電流或轉差率的變化關系,為電機在不同運行狀態下的參數選擇提供依據。
[1] F. Barrero, M. J. Duran. Recent Advances in the Design, Modeling, and Control of Multiphase Machines—Part I[J]. IEEE Trans. Ind Electron. 2016, 63(1):449-458.
[2] 楊家強,高健,黃進. 多相感應電機指數響應電子變極方法研究[J]. 中國電機工程學報,2013,33(27):105-111.
[3] 康敏,黃進,等. 多相異步電機參數的計算與測量[J]. 中國電機工程學報,2010, 30(24): 81-87.
[4] 湯蘊璆. 電機學[M]. 北京:機械工業出版社,2008:185-187.
[5] 劉鵬,吳文進,蘇建徽. 一種異步電動機靜止狀態下參數辨識的改進方法[J]. 電工技術學報,2015, 30(5):42-48.
[6] M. Zigliotto, M. Carraro, F. Tinazzi. The influence of the squirrel cage rotor in the estimation of the IM flux linkage at standstill[C]. IEEE International Conference on Industrial Technology,2013, 113(8):410-415.
[7] M. Carraro, M. Zigliotto. Antomatic Parameter Identification of Inverter-Fed Induction Motors at Standstill[J]. IEEE Trans. Ind. Appl, 2014, 61(9):4605-4613.
[8] L. Peretti, M. Zigliotto. Automatic procedure for induction motor parameter estimation at standstill[J].IET Electr. Power Appl., 2012, 6(4):214-224.
Parameters Identification of Multiphase Induction Motors at Standstill
ZHENG Shida,YANG Jiaqiang
(Zhejiang University, Hangzhou 310027, China)
In order to obtain the accurate parameters of multiphase induction motor(IM) at standstill, a method was proposed based on the asymmetric T type circuit. Considering the smaller parameters of the low voltage and high power multiphase IMs than usual 3-phase IMs, voltage acquirement is via measuring phase voltage directly instead of voltage reconstruction so that the nonlinearity and compensation errors are avoided. Especially for the magnetizing inductance (approximately 8~10mH), both low-frequency injection and current dropping methods are adopted to validate the final value of magnetizing inductance. The experimental results show the validation of the proposed parameter identification method.
parameters estimation; standstill state; low-voltage &high power; multiphase induction motor
TM311
B
1000-3983(2018)06-0001-05
國家自然科學基金(面上項目)(51777191)。
2018-01-22
鄭仕達(1995-),浙江大學,電機及其控制研究所,碩士研究生在讀,研究方向為電機參數辨識與控制。