基于ANSYS的輪邊減速器行星齒輪系有限元分析
2018-12-06 02:05:42
安順學(xué)院學(xué)報(bào) 2018年5期
(安徽國(guó)防科技職業(yè)學(xué)院,安徽 六安237011)
引 言
叉車作為物流的一種關(guān)鍵工具,在所有領(lǐng)域的搬運(yùn)作業(yè)中充當(dāng)著關(guān)鍵角色,叉車包括了以下兩類:內(nèi)燃叉車及電動(dòng)叉車。內(nèi)燃叉車應(yīng)用發(fā)動(dòng)機(jī)作為動(dòng)力裝置,使用燃油作為動(dòng)力能源,既不經(jīng)濟(jì)也不環(huán)保,還有安全隱患;電動(dòng)叉車不使用燃油而運(yùn)用電能作為其動(dòng)力能源,安全又環(huán)保。由于電動(dòng)叉車使用時(shí)具有安全可靠、操作便利、安靜、環(huán)保等優(yōu)勢(shì),所以于各行各業(yè)中都得到了較為廣泛的應(yīng)用,這也加快了電動(dòng)叉車的發(fā)展[1]。
三支點(diǎn)電叉車轉(zhuǎn)彎半徑更小,更適合在狹窄通道或有限作業(yè)空間內(nèi)進(jìn)行物料轉(zhuǎn)運(yùn),越狹小的空間越能體現(xiàn)其優(yōu)越性。根據(jù)驅(qū)動(dòng)類型來(lái)分電動(dòng)叉車可以分為以下三類:前輪驅(qū)動(dòng)、全輪驅(qū)動(dòng)及后輪驅(qū)動(dòng)。文中涉及的電動(dòng)叉車采用的驅(qū)動(dòng)形式為前輪分別驅(qū)動(dòng),即為前輪驅(qū)動(dòng)三支點(diǎn)電動(dòng)叉車[2]。
三支點(diǎn)前驅(qū)電動(dòng)叉車由于其工作實(shí)際與工作環(huán)境,因而要求有較大的傳動(dòng)比和離地間隙,而采用輪邊減速器結(jié)構(gòu)可以達(dá)到這一要求。輪邊減速器的使用可以減去了傳統(tǒng)的變速箱、差速器及制動(dòng)器等部件,既簡(jiǎn)化了電動(dòng)叉車整車結(jié)構(gòu),使整車體積減小,縮短了動(dòng)力傳遞路徑,提高效率、減少浪費(fèi)[3]。圖1為輪邊減速器實(shí)物圖,圖2為輪邊減速器的安裝位置。
輪邊減速器的行星輪系結(jié)構(gòu)下的太陽(yáng)輪同時(shí)與三個(gè)行星齒輪嚙合,且作為齒輪軸上的結(jié)構(gòu)齒輪需要承受制動(dòng)工況中的沖擊載荷,由于相互之間的應(yīng)力非常大,對(duì)輪齒的強(qiáng)度要求非常高。行星齒輪在工作時(shí),同時(shí)受到內(nèi)齒圈與太陽(yáng)輪的共同作用,這很可能導(dǎo)致輪齒出現(xiàn)疲勞,最終可能使得輪齒出現(xiàn)折斷。因此當(dāng)研制行星輪系的齒輪時(shí),如何有效的增強(qiáng)輪齒的彎曲強(qiáng)度,提高輪齒運(yùn)轉(zhuǎn)時(shí)的可靠性等問(wèn)題也是設(shè)計(jì)過(guò)程中必須要考慮的關(guān)鍵點(diǎn)。因此,本文針對(duì)輪邊減速器里邊的核心傳動(dòng)裝置行星齒輪系進(jìn)行靜態(tài)接觸力學(xué)性能分析。
通過(guò)進(jìn)一步的分析可以看出,有限元分析方法能夠更好地節(jié)約成本,能夠更加直觀的觀察到結(jié)果。研究過(guò)程中,主要是對(duì)齒輪的結(jié)構(gòu)進(jìn)行效率分析,并且闡述了齒輪運(yùn)行過(guò)程中的受力情況。此外,還借助于Pro/E軟件構(gòu)建了具體的三維模型,并且將該模型導(dǎo)入ANSYS軟件中進(jìn)行力學(xué)分析,得出了可靠的實(shí)驗(yàn)結(jié)果與結(jié)論。
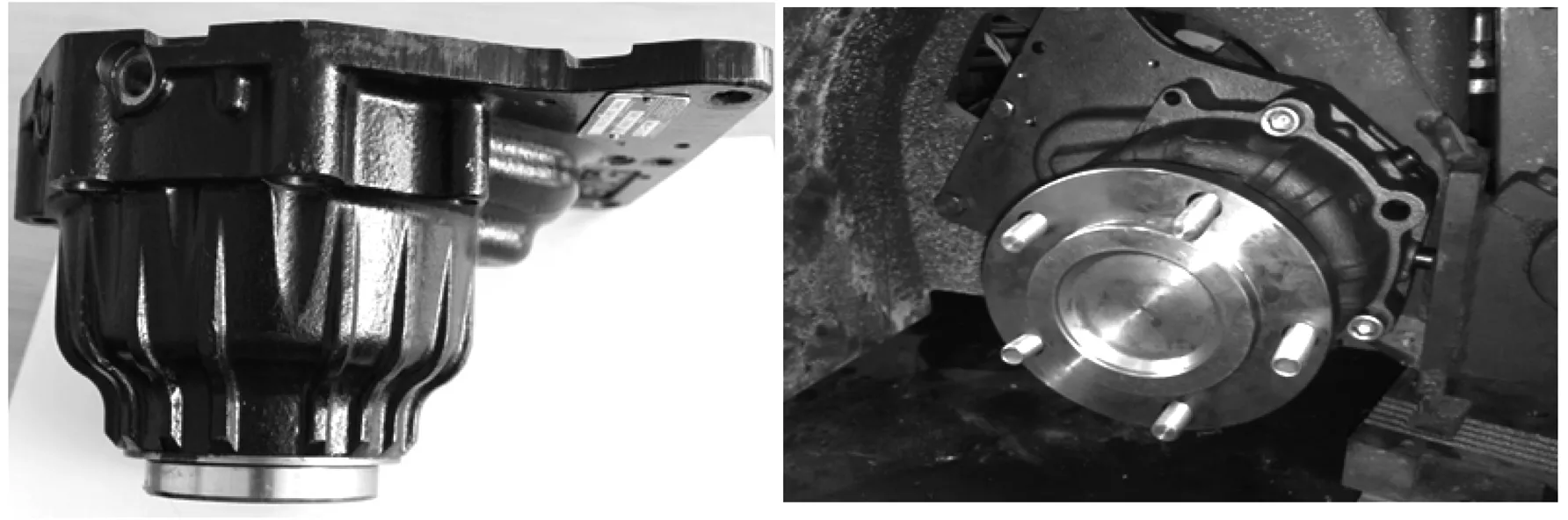
圖1 輪邊減速器實(shí)物圖 圖2 輪邊減速裝置在車架上的固定
1 行星齒輪幾何模型的建立
輪邊減速器作為電動(dòng)叉車的主要部件,內(nèi)部帶有制動(dòng)方式的輪邊減速器的傳動(dòng)機(jī)構(gòu),齒輪7與行星架4形成軸向偏心,使得叉車離地間隙變大,提升了叉車通過(guò)障礙的能力,通過(guò)制動(dòng)大齒輪6從而制動(dòng)小齒輪7,這樣即可以中斷整個(gè)輪系的動(dòng)力源,以此來(lái)實(shí)現(xiàn)叉車的制動(dòng)。太陽(yáng)輪3作為行星輪系的輸入齒輪帶動(dòng)行星輪2,行星架4帶動(dòng)輪轂1的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)減速制動(dòng)[4],如圖3所示。
對(duì)行星齒輪機(jī)構(gòu)進(jìn)行建模,建模過(guò)程中,主要是借助于Pro/E軟件來(lái)實(shí)現(xiàn)的。通過(guò)分析可以看出,輪邊減速器中一個(gè)非常重要的部件就是行星齒輪系。在建模的過(guò)程中,必須要確保行星齒輪機(jī)構(gòu)建模足夠的精確,只有這樣才能夠保障有限元分析求解的精度。Pro/E軟件在建模方面具有比較大的優(yōu)勢(shì),精確度比較高,因此,能夠更好地滿足建模的要求。表1為相關(guān)參數(shù)。

(1-輪轂 2-行星輪 3-太陽(yáng)輪 4-行星架 5-內(nèi)齒圈 6-大齒輪 7-小齒輪)圖3 三支點(diǎn)前驅(qū)電動(dòng)叉車輪邊減速器傳動(dòng)示意圖
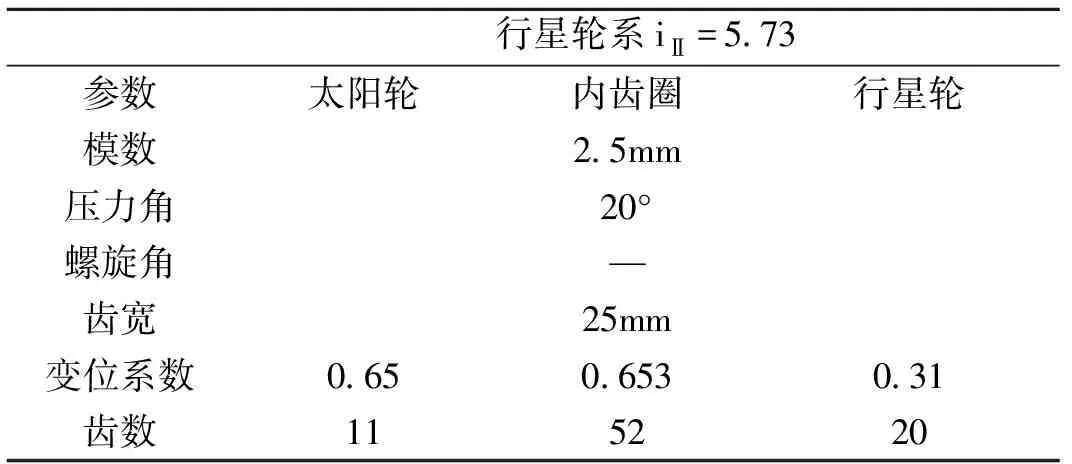
行星輪系iⅡ=5.73參數(shù)太陽(yáng)輪內(nèi)齒圈行星輪 模數(shù)2.5mm壓力角20°螺旋角—齒寬25mm變位系數(shù)0.65 0.653 0.31齒數(shù) 11 52 20
電動(dòng)叉車輪邊減速器中的傳動(dòng)齒輪均采用漸開線直齒輪。輪邊減速器的對(duì)應(yīng)參數(shù)在設(shè)計(jì)時(shí)就已經(jīng)確定好,見表2。
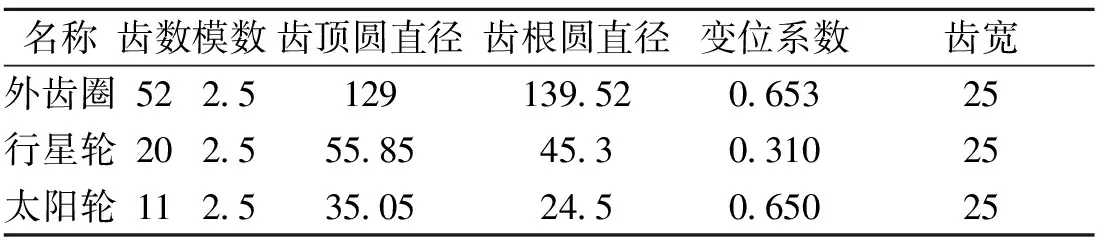
表2 行星齒輪機(jī)構(gòu)參數(shù)表
通過(guò)Pro/E的參數(shù)化功能,以上表為依據(jù),創(chuàng)建精確的三維實(shí)體模型,如圖4、圖5。
2 有限元模型的建立
借助于有限元分析方法進(jìn)行處理的過(guò)程中,接觸問(wèn)題實(shí)際上是一種邊界非線性問(wèn)題。而在工程非線性數(shù)值解法方面,目前已經(jīng)有多種方法可供選擇,其中,直接迭代法等是用的比較多的,文中采用牛頓-拉普森迭代法進(jìn)行計(jì)算[5]。
2.1 牛頓-拉普森迭代法
可一階求導(dǎo)的連續(xù)函數(shù)ψ(δ)=0,在δn點(diǎn)作一階泰勒級(jí)數(shù)(Taylor)展開,它在δn的線性近似公式是:
因此,非線性方程ψ(δ)=0在δn附近的近似方程是線性方程:
記Δδn=δn+1-δn,它的解為:
上式就是牛頓-拉普森法迭代公式,能夠求解方程ψ(δ)=0。通過(guò)對(duì)圖6的分析可以看出,曲線實(shí)際上已經(jīng)反映了整個(gè)求解過(guò)程。從該方法來(lái)看,其具有比較好的收斂性,但如果要經(jīng)過(guò)多次迭代操作,每一次都要形成新的切線剛度矩陣[6]。
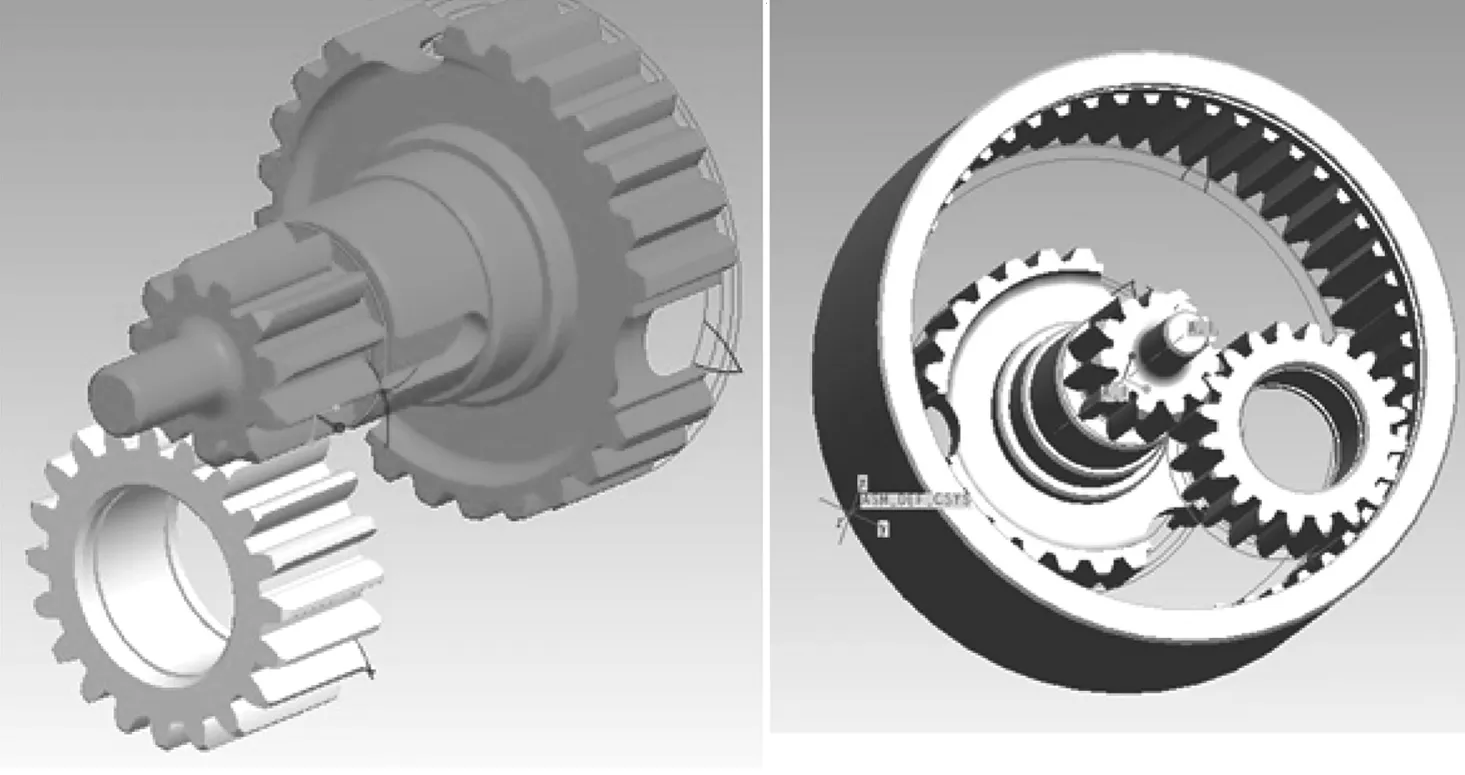
圖4 行星輪與太陽(yáng)輪裝配圖 圖5 行星輪系總裝配圖

圖6 牛頓-拉普森迭代法
2.2 修正的牛頓-拉斐遜方法
2.3 模型導(dǎo)入及網(wǎng)格劃分
在表3的基礎(chǔ)上,進(jìn)一步對(duì)實(shí)體模型進(jìn)行構(gòu)建。建模過(guò)程中,需要結(jié)合有限元分析軟件的具體需求,在符合要求的前提下,去掉一些和分析沒有關(guān)系的部件,從而使模型得到簡(jiǎn)化。模型的構(gòu)建如圖7所示。在操作過(guò)程中,借助于Pro/E與Ansys之間的數(shù)據(jù)傳輸來(lái)完成三維模型導(dǎo)入。

圖7 行星齒輪嚙合對(duì)裝配與簡(jiǎn)圖
齒輪材料20CrMnTiσFP693MPaσHP750MPaTa168N·M模數(shù)m2.5 mm彈性模量207 GPa壓力角20°泊松比0.25齒寬25 mm重合度2.4齒數(shù)za=11zb=20變位系數(shù)xa=0.65xb =0.31
對(duì)單元類型以及材料的屬性進(jìn)行定義。材料屬性的界定,需要嚴(yán)格按照表3中的相關(guān)參數(shù)來(lái)進(jìn)行,以此為依據(jù),劃分有限元網(wǎng)格,完成有限元模型的建立,得到的模型包含節(jié)點(diǎn)共計(jì)45959個(gè),單元27284個(gè),如圖8所示。

圖8 行星齒輪嚙合對(duì)有限元模型
2.4 定義接觸對(duì)
把太陽(yáng)輪和行星輪確定為接觸面及目標(biāo)面。相關(guān)的數(shù)據(jù)如表4所示。最終得到的具體模型如圖9所示。

表4 接觸對(duì)明細(xì)表
圖9 接觸對(duì)有限元模型
3 邊界條件及載荷施加
3.1 邊界條件
在模型建立以及接觸對(duì)設(shè)置完成基礎(chǔ)上,還應(yīng)當(dāng)對(duì)相關(guān)的節(jié)點(diǎn)等作進(jìn)一步的處理。二者嚙合時(shí),將行星齒輪視為靜止,只考慮太陽(yáng)輪的運(yùn)動(dòng),而不作其他運(yùn)動(dòng)的約束條件。
3.2 載荷施加
對(duì)于通過(guò)齒輪傳動(dòng)的機(jī)械,兩個(gè)齒輪相互接觸時(shí),往往是線接觸,由于接觸面之間存在著塑性變形,線接觸極易形成面接觸。受力分析時(shí),將載荷集中在一條線上時(shí),將會(huì)出現(xiàn)較嚴(yán)重的應(yīng)力集中現(xiàn)象,因此為了避免此現(xiàn)象的出現(xiàn),可通過(guò)添加圓周切向力進(jìn)行調(diào)節(jié),如圖10所示,以等效傳遞扭矩(假設(shè)傳遞效率為1),則行星輪的圓周切向力為
(Ta-轉(zhuǎn)矩;d-內(nèi)圈直徑;n-節(jié)點(diǎn)數(shù);fn-切向力)
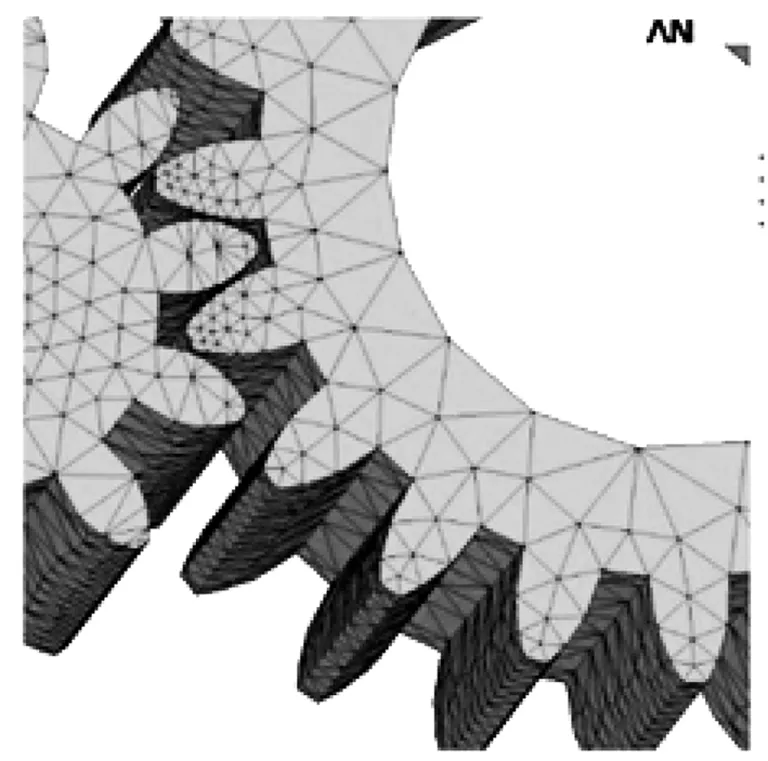
圖10 對(duì)行星輪加載圓周切向力
由表3中數(shù)據(jù)得到動(dòng)力傳動(dòng)到行星輪的轉(zhuǎn)矩為Ta=168N.M,d=45.3mm,n=4860,圓周切向力
具體加載設(shè)置如表5所示,加載如圖11
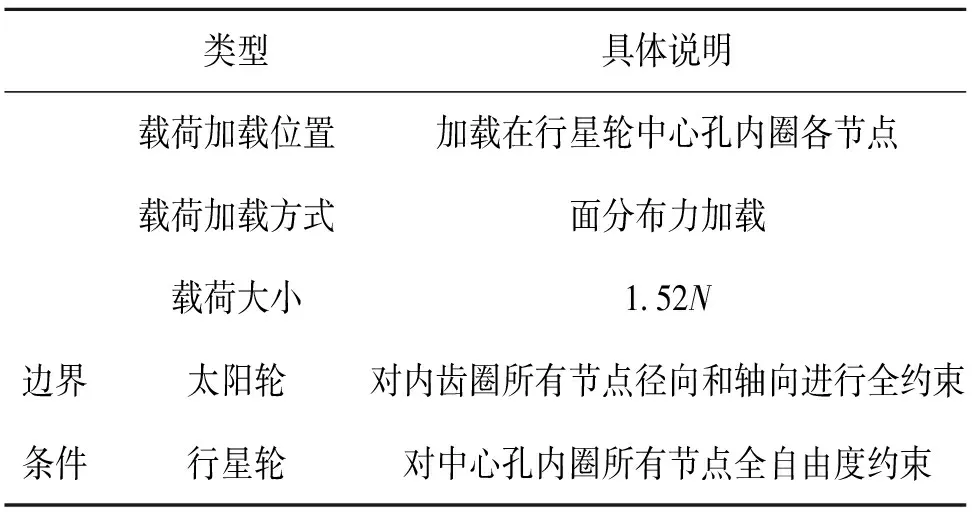
表5 行星輪加載
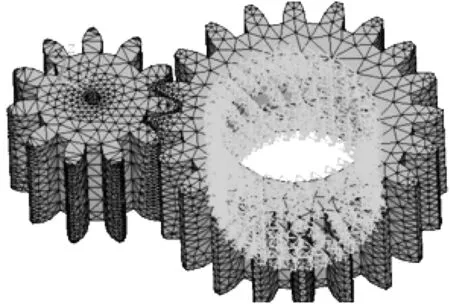
圖11 加載圖
4 求解結(jié)果
在正式進(jìn)行求解時(shí),還需要先設(shè)置好具體的非線性求解特性,并且設(shè)置變形模式為L(zhǎng)argeDisplacementStatic。求解過(guò)程中,時(shí)間設(shè)定為1,子步數(shù)和最大子步數(shù)分別為20和50。此外,還需要將LineSearch項(xiàng)置On。不僅如此,還要進(jìn)一步將DOFsolutionpredictor項(xiàng)置為Onforallsubstep。進(jìn)行求解工作,圖12為嚙合齒輪對(duì)的等效應(yīng)力分布圖,數(shù)值顯示出現(xiàn)在太陽(yáng)輪受力輪齒的側(cè)齒根處。圖13為等效應(yīng)力分布情況,最大應(yīng)力數(shù)值為78.1MPa。
5 結(jié)果分析及優(yōu)化
5.1 結(jié)果分析
如果借助于表3中的具體參數(shù)來(lái)建立齒輪,并施加一定的約束和載荷,此時(shí)有σmax=979MPa。對(duì)于齒面接觸部位來(lái)說(shuō),最大應(yīng)力為78.1MPa。
與表3做對(duì)比,齒面接觸強(qiáng)度在規(guī)定數(shù)值之內(nèi),然而齒根彎曲應(yīng)力數(shù)值偏大,最大齒根彎曲應(yīng)力超出齒輪材料許用彎曲應(yīng)力的45%,情況嚴(yán)重會(huì)導(dǎo)致輪齒折斷,齒輪工作失效。
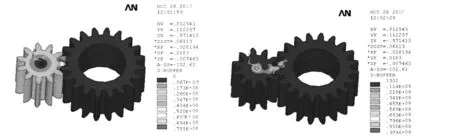
圖12 嚙合齒輪對(duì)分析應(yīng)力云圖 圖13 輪齒齒面接觸應(yīng)力云圖
5.2 優(yōu)化
齒面修形。在對(duì)嚙合齒輪進(jìn)行齒面修形時(shí),可以通過(guò)兩種途徑來(lái)實(shí)現(xiàn)。具體如表6所示。首先,可以采用齒輪高度變位的方式來(lái)進(jìn)行。兩個(gè)輪的變位系數(shù)分別為xa=0.77和xb=0.25。進(jìn)行分析之后獲得嚙合齒輪對(duì)的等效應(yīng)力分布及大小如圖14所示。齒面接觸應(yīng)力云圖如圖15所示。其次,可以在第一種途徑的基礎(chǔ)上,調(diào)整齒輪的壓力角,從一開始的20°調(diào)整為24°。在此基礎(chǔ)上,再次進(jìn)行仿真求解。最終的應(yīng)力分布及大小和齒面接觸應(yīng)力云圖分別如圖16和圖17所示。
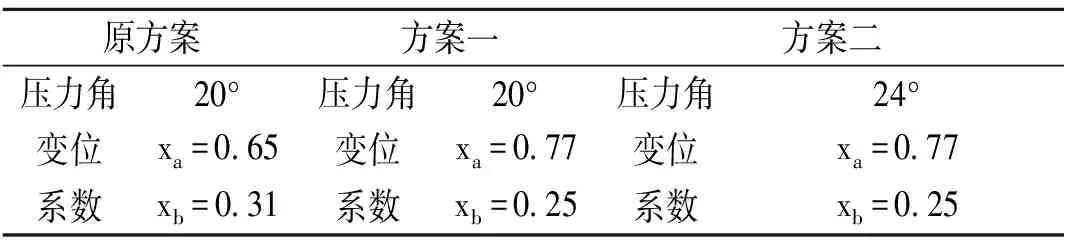
表6 太陽(yáng)輪與行星輪修形嚙合參數(shù)優(yōu)化方案
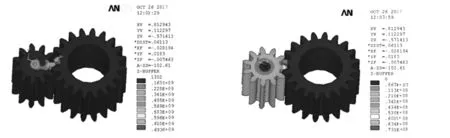
圖14 太陽(yáng)輪輪齒根彎曲應(yīng)力云圖(方案一) 圖15 齒面接觸應(yīng)力云圖(方案一)
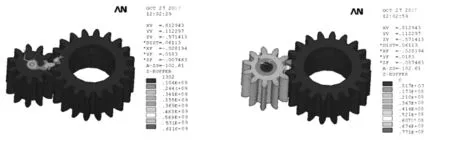
圖16 太陽(yáng)輪輪齒根彎曲應(yīng)力云圖(方案二) 圖17 齒面接觸應(yīng)力云圖(方案二)
由此可見,對(duì)于不同的齒輪參數(shù),得到不同的應(yīng)力數(shù)值,對(duì)這三種方案進(jìn)行分析如下表7:
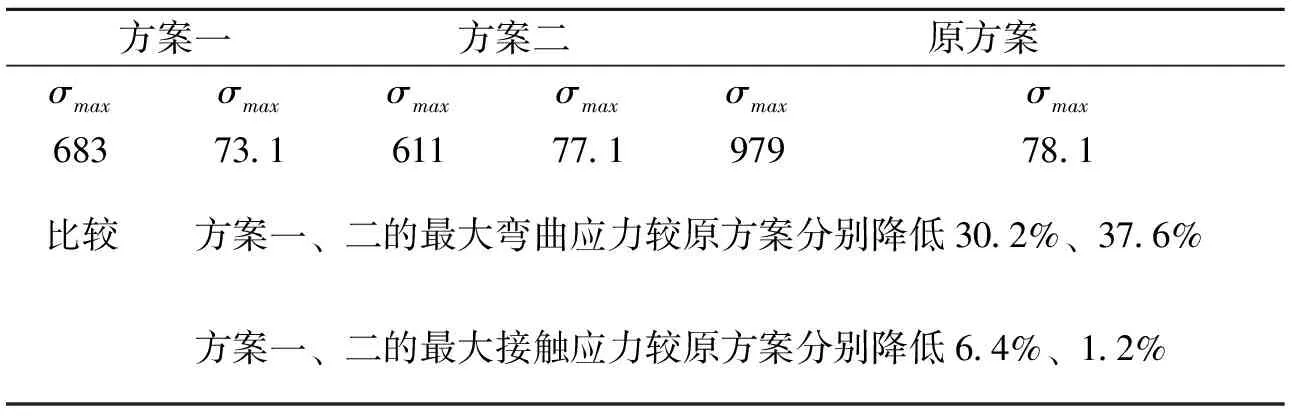
表7 各方案分析比較
通過(guò)對(duì)上述兩種優(yōu)化途徑的分析可以看出,第一種主要是對(duì)變位系數(shù)進(jìn)行調(diào)整;第二種途徑不僅要調(diào)整變位系數(shù),而且還要調(diào)整壓力角的大小。通過(guò)增大壓力角,能夠使得齒輪的承載能力得到提升,但亦存在某些方面的不足,如齒輪加工精度不足、要求使用特殊刀具等。綜上所述,根據(jù)現(xiàn)實(shí)狀況,對(duì)所分析的行星齒輪對(duì)運(yùn)用方案一來(lái)增強(qiáng)太陽(yáng)輪與行星輪的承載能力比較合理。
6 結(jié)論
借助于ANSYS軟件對(duì)電叉車輪邊減速器行星齒輪傳動(dòng)中的行星輪系進(jìn)行有限元分析,根據(jù)分析結(jié)果,結(jié)合材料性能的要求,對(duì)相關(guān)的參數(shù)作進(jìn)一步的優(yōu)化處理,齒輪嚙合副能夠更好地滿足要求,從而使得輪邊減速器的可靠性得到進(jìn)一步的提升,使得設(shè)計(jì)周期得到縮短,最終實(shí)現(xiàn)節(jié)省生產(chǎn)成本的目的。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
- 安順學(xué)院學(xué)報(bào)的其它文章
- 安順學(xué)院“貴州省大學(xué)生思想政治理論課優(yōu)秀教學(xué)科研團(tuán)隊(duì)”簡(jiǎn)介
- 農(nóng)民行動(dòng)空間的集聚效應(yīng)分析
——以貴州省安順市西秀區(qū)九溪村為例 - 貴州省少數(shù)民族大學(xué)生體質(zhì)狀況動(dòng)態(tài)研究
——以安順學(xué)院為例 - 地方院校日語(yǔ)專業(yè)聽說(shuō)課程模塊化教學(xué)研究
——以安順學(xué)院為例 - 形成性評(píng)價(jià)與法學(xué)本科課程的改革
——以《行政訴訟法學(xué)》課程為例 - 多元建構(gòu)視域下民族地區(qū)貧困治理研究
——以湖北恩施土家族苗族自治州巴東縣為例