車輛懸掛LQR主動(dòng)控制權(quán)矩陣權(quán)重參數(shù)優(yōu)化
2018-11-30 00:51:40張進(jìn)秋彭志召孫宜權(quán)
振動(dòng)與沖擊 2018年22期
張進(jìn)秋, 彭 虎, 張 建, 彭志召, 孫宜權(quán), 王 輝
(1. 裝甲兵工程學(xué)院 裝備試用與培訓(xùn)大隊(duì),北京 100072;2. 裝甲兵工程學(xué)院 技術(shù)保障工程系,北京 100072;3. 66222部隊(duì),北京 102202)
車輛主動(dòng)懸掛可實(shí)現(xiàn)任意方向出力,可更好地跟蹤路面狀況變化條件下對(duì)懸掛隔振所需的控制力,具有良好的發(fā)展前景[1-2]。良好的主動(dòng)控制算法是保證主動(dòng)控制性能關(guān)鍵之一[3-4]。LQR線性二次型最優(yōu)控制是一種經(jīng)典的最優(yōu)控制算法,在航天、建筑、橋梁等方面得到了廣泛應(yīng)用[5-7]。LQR主動(dòng)控制算法的關(guān)鍵在于權(quán)矩陣Q和R的設(shè)計(jì),且一般無規(guī)律可循,通常采用試湊的方法來確定權(quán)矩陣的值[8]。該方法的局限性在于效率較低,且難以得到較優(yōu)的解。
遺傳算法(Genetic Algorithm, GA)是一類模擬自然界優(yōu)化進(jìn)化和繁殖過程的自適應(yīng)全局概率搜索方法[9]。具備較好的收斂性能,在滿足要求的計(jì)算精度時(shí),具有計(jì)算時(shí)間短且魯棒性好等優(yōu)點(diǎn)[10-11]。
本文針對(duì)LQR主動(dòng)控制算法權(quán)矩陣取值困難的問題,為降低權(quán)矩陣設(shè)計(jì)復(fù)雜度,設(shè)計(jì)權(quán)矩陣Q和R的權(quán)重參數(shù),利用GA的快速搜索尋優(yōu)能力,將原有4參數(shù)尋優(yōu)轉(zhuǎn)變成對(duì)權(quán)矩陣權(quán)重參數(shù)的尋優(yōu),并將得到的最優(yōu)解與初始LQR參數(shù)在仿真條件下進(jìn)行對(duì)比,驗(yàn)證設(shè)計(jì)的權(quán)矩陣權(quán)重參數(shù)優(yōu)化方法的有效性。
1 模型建立及LQR控制算法
1.1 懸掛動(dòng)力學(xué)模型
懸掛動(dòng)力學(xué)建模是對(duì)懸掛振動(dòng)特性及控制性能分析的基礎(chǔ),1/4車懸掛動(dòng)力學(xué)模型可用于對(duì)懸掛系統(tǒng)及其控制性能進(jìn)行理論分析。假設(shè)車輛為獨(dú)立懸掛,質(zhì)量分配系數(shù)為1,建立的1/4車主動(dòng)懸掛動(dòng)力學(xué)模型如圖1所示。
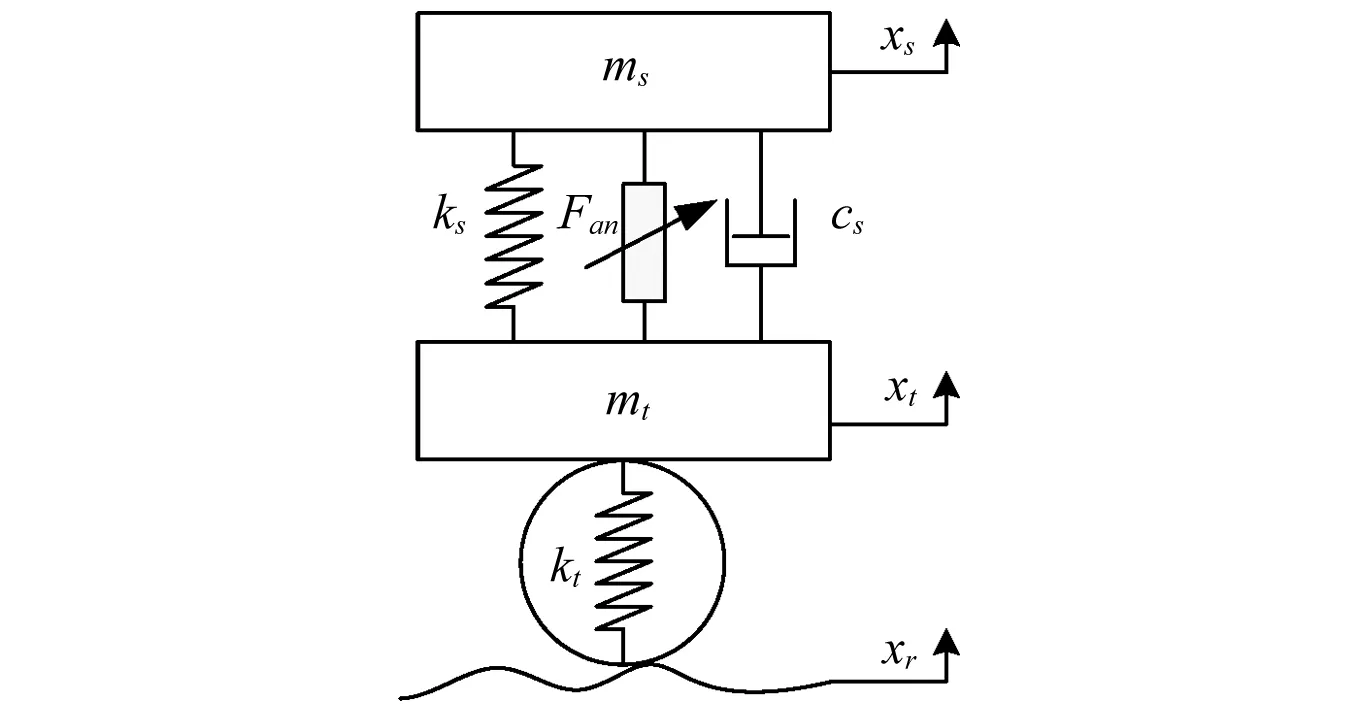
圖1 1/4車主動(dòng)懸掛動(dòng)力學(xué)模型Fig.1 Quarter car active suspension dynamic model
根據(jù)牛頓第二定律,建立運(yùn)動(dòng)微分方程
(1)
式中:ms為車身質(zhì)量;mt為車輪質(zhì)量;ks和kt分別為懸掛等效剛度和車輪剛度;cs為懸掛等效阻尼系數(shù),在此主要包括;xr為路面不平度位移激勵(lì);xs和xt分別為車輪和車身垂直位移;Fan為作動(dòng)器提供的主動(dòng)控制力。坐標(biāo)原點(diǎn)選在各自平衡位置,方向均以垂直向上為正。
(2)

1.2 LQR控制算法

式中:ρ1、ρ2、ρ3分別為車身垂直加速度、懸掛動(dòng)行程和車輪動(dòng)變形三個(gè)被控量的加權(quán)系數(shù),依次反映對(duì)各受控量的重視程度;r為主動(dòng)控制力的加權(quán)系數(shù),反映對(duì)系統(tǒng)提供的主動(dòng)控制力的重視程度。
取ρ=diag(ρ1,ρ2,ρ3)為權(quán)重矩陣,式(3)所表示的性能泛函可寫成
令Q=CTρC為狀態(tài)變量的半正定對(duì)稱加權(quán)矩陣;N=CTρD,為兩種變量關(guān)聯(lián)加權(quán)矩陣;R=DTρD+r,控制變量的正定對(duì)稱加權(quán)矩陣。
采用變分法求解,可得反饋增益矩陣為
G=R-1BTP
(5)
矩陣P可由Riccati方程求出:
ATP+PA-PBR-1BTP+Q=0
(6)
作動(dòng)器的最優(yōu)控制力Fan(t):
Fan(t)=-GX=
-[G1x1(t)+G2x2(t)+G3x3(t)+G4x4(t)]
(7)
2 GA優(yōu)化加權(quán)系數(shù)
2.1 權(quán)矩陣權(quán)重參數(shù)
LQR中權(quán)矩陣Q和R的設(shè)計(jì)非常關(guān)鍵,直接影響LQR的控制性能,Q為半正定矩陣,R為正定矩陣。LQR最優(yōu)控制的目標(biāo)是以性能泛函最小為約束,需求時(shí)變、系統(tǒng)狀態(tài)及輸入變化時(shí)所需的最優(yōu)控制力Fan(t),使系統(tǒng)始終趨于初始最優(yōu)狀態(tài)。性能指標(biāo)加權(quán)矩陣Q和控制力矩陣R相互制約,通常選擇為對(duì)角線矩陣,控制輸入單一時(shí)可直接取標(biāo)量為R=1,Q的選擇不唯一[13]。
選取車身垂直加速度、懸掛動(dòng)行程和車輪動(dòng)變形作為評(píng)價(jià)指標(biāo),分別用ACC、DXC和DZH來表示。Q和R的初始值可分別選取對(duì)應(yīng)變量的最大值的倒數(shù),以ACCmax、DXCmax、DZHmax和Fan_max表示,則
(8)
(9)
式中:λ和ξ分別表示Q和R的權(quán)重。通過上式可將優(yōu)化參數(shù)ρ1、ρ2、ρ3和r轉(zhuǎn)變?yōu)榍蠼鈨?yōu)化參數(shù)λ和ξ,簡(jiǎn)化了計(jì)算復(fù)雜程度,可以較快地找到最優(yōu)控制參數(shù)。
為了性能指標(biāo)均衡反映各自性能,應(yīng)當(dāng)使性能泛函中各狀態(tài)變量或控制量的數(shù)量級(jí)大小一致或相近。以加速度和位移為例,若位移的數(shù)量級(jí)為加速度的0.01倍,則對(duì)應(yīng)加權(quán)值數(shù)量級(jí)應(yīng)當(dāng)為加速度的1002倍。

分別分析λ(lamda)和ξ(kesai)對(duì)適應(yīng)度函數(shù)的影響,令ξ=1,λ取值0.01~10,分析λ對(duì)f的影響;而后令λ=1,ξ取0.01~5,分析ξ對(duì)f的影響,結(jié)果如圖2所示。

圖2 lamda和kesai對(duì)f的影響Fig.2 The influence of lamda and kesai on f
圖2可知,λ使f先減小,后增大,在λ=5附近取得最小值。該結(jié)果表明,為了追求較好的控制效果,需要加大控制性能指標(biāo)加權(quán)矩陣Q的權(quán)重,但并非權(quán)重越大越好,而是存在一個(gè)最優(yōu)值。ξ使先減小,后增大,控制力矩陣R較小時(shí),可使f的值較小,而加大R的權(quán)重后,控制力加大,對(duì)控制的實(shí)際效果增加比例小于輸入的控制力消耗比例,致使f增加。
通過上述分析可知,LQR最優(yōu)控制的目標(biāo)需要以較小的控制力消耗來達(dá)到最優(yōu)的控制效果,而兩者之間存在一定的相互關(guān)聯(lián)和相互影響關(guān)系。因此,需要對(duì)λ和ξ進(jìn)行優(yōu)化。
2.2 目標(biāo)函數(shù)的建立

(10)

2.3 GA參數(shù)尋優(yōu)
GA對(duì)加權(quán)系數(shù)尋優(yōu)的步驟為:
步驟1產(chǎn)生初始種群,在設(shè)定的約束范圍內(nèi)隨機(jī)產(chǎn)生N個(gè)加權(quán)系數(shù)的初始種群,以實(shí)數(shù)形式進(jìn)行編碼。
步驟2將種群中的每個(gè)加權(quán)系數(shù)個(gè)體值賦給LQR控制器,由式(6)求出反饋增益矩陣G,并由式(9)求出最優(yōu)控制力,帶入懸掛系統(tǒng)中進(jìn)行仿真分析,求解各性能指標(biāo)均方根值。

步驟4GA通過選擇、復(fù)制、交叉及變異等操作,實(shí)現(xiàn)個(gè)體編碼重組,保留精英個(gè)體,并產(chǎn)生新的個(gè)體,而后跳至步驟2重新計(jì)算適應(yīng)度函數(shù)值。
GA尋優(yōu)流程如圖3所示。

圖3 GA尋優(yōu)流程圖Fig.3 Flow chart of GA optimization
設(shè)置種群規(guī)模100,迭代次數(shù)20,交叉概率0.6,變異概率0.1,由于每次運(yùn)行的初始種群不一致,故得到的最優(yōu)解也存在一定差異,但總的趨勢(shì)相一致。算法收斂之后,可得最優(yōu)值λ=4.785 4,ξ=0.631 5,對(duì)應(yīng)的反饋增益矩陣G=[0.365 5 -0.034 4 1.755 5 -2.690 3]。
3 算例分析
3.1 仿真條件
以被動(dòng)懸掛及常規(guī)LQR為對(duì)比,對(duì)權(quán)矩陣權(quán)重參數(shù)尋優(yōu)后的LQR振動(dòng)控制性能進(jìn)行分析。
車輛懸掛參數(shù)如表1所示。

表1 懸掛系統(tǒng)參數(shù)
隨機(jī)路面生成采用諧波疊加法,諧波疊加法生成路面不平度的主要思想是將路面表示成大量隨機(jī)相位的余弦級(jí)數(shù)之和[16],表達(dá)式為
(11)
式中:φk為[0.2π]上的隨機(jī)數(shù),且滿足均勻分布;fmid_k為頻率區(qū)間(f1,f2)上第k個(gè)離散區(qū)間的重心頻率,當(dāng)車速為v時(shí),fmid_k=nmid_kv;Gxr(fmid_k)為fmid_k處的譜密度值,
Gxr(fmid_k)=Gxr(nmid_k)/v
(12)
C級(jí)路面10 m/s車速作為隨機(jī)路面等級(jí)和車速的條件,對(duì)懸掛進(jìn)行仿真分析,時(shí)域路面如圖4所示。
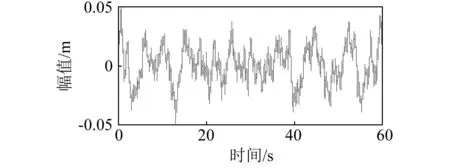
圖4 C級(jí)隨機(jī)路面10 m/s車速時(shí)域圖Fig.4 Time domain chart of random rode at speed of 10 m/s of grade C
3.2 時(shí)域分析
仿真時(shí)長(zhǎng)25 s,步長(zhǎng)0.01,LQR表示優(yōu)化前的結(jié)果,GA-LQR表示采用GA優(yōu)化后得到的結(jié)果。隨機(jī)路面時(shí)域分析及減振性能指標(biāo)統(tǒng)計(jì)結(jié)果分別如圖5及表2所示。
結(jié)合圖5及表2可知,相比于優(yōu)化前的LQR控制,GA-LQR可使車身垂直加速度降低29.61%,比LQR高出6.54%;而GA-LQR可使車輪動(dòng)變形指標(biāo)比LQR降低幅度高6.14%;LQR和GA-LQR對(duì)應(yīng)的f的值分別為0.793 2和0.784 2,優(yōu)化后的參數(shù)使得f的值降低了。雖然GA-LQR犧牲了一定的懸掛動(dòng)行程,本文以提高乘坐舒適性為主要目標(biāo),達(dá)到了優(yōu)化設(shè)計(jì)的目的。

圖5 隨機(jī)路面時(shí)域分析Fig.5 Time domain analyze of random rode

表2 減振性能指標(biāo)統(tǒng)計(jì)結(jié)果
3.3 頻域分析
懸掛系統(tǒng)頻域分析即通過各指標(biāo)的傳遞函數(shù)分析各自的頻響特性,由于控制的非線性,使得線性系統(tǒng)的頻率響應(yīng)Bode圖不適于半主動(dòng)饋能懸掛性能評(píng)價(jià),但可近似估計(jì)其傳遞特性[17]。懸掛系統(tǒng)性能指標(biāo)頻域分析如圖6所示。

圖6 頻域分析Fig.6 Frequency analysis
圖6可知,LQR和GA-LQR對(duì)車身垂直加速度的抑制主要集中于3 Hz以下的低頻段,其中GA-LQR對(duì)車身共振區(qū)的抑制能力優(yōu)于LQR;1 Hz以下,LQR和GA-LQR使懸掛動(dòng)行程惡化,但在車身共振區(qū)1~2 Hz區(qū)間內(nèi)可減小共振峰,其余頻段影響不大;LQR和GA-LQR對(duì)車輪動(dòng)變形的抑制主要集中于3 Hz以下,其余頻段影響不大。
綜上所述,LQR和GA-LQR對(duì)3個(gè)指標(biāo)的影響主要在低頻段,低于1Hz時(shí),對(duì)車身垂直加速度和車輪動(dòng)變形改善不明顯,但對(duì)懸掛動(dòng)行程惡化較為明顯,因此,不宜在低于1 Hz的頻段下進(jìn)行控制;在車身共振峰附近,對(duì)3個(gè)指標(biāo)均有較好的抑制性能,因此,在1~3 Hz頻段進(jìn)行控制效果最為明顯;在高于3 Hz的頻段內(nèi)控制效果不明顯。車輛行駛工況大多在低頻區(qū),因此,采用GA-LQR可有效改善懸掛控制性能,提高乘坐舒適性和操縱穩(wěn)定性。
4 結(jié) 論
針對(duì)經(jīng)典LQR主動(dòng)控制算法的加權(quán)矩陣Q和R難以確定的問題,將權(quán)矩陣初始值確定為各指標(biāo)性能最大值平方的倒數(shù),以便于優(yōu)化取值。為簡(jiǎn)小優(yōu)化復(fù)雜度,分別對(duì)應(yīng)Q和R設(shè)計(jì)權(quán)重參數(shù)λ和ξ,設(shè)計(jì)適應(yīng)度函數(shù)f及其約束條件,并分析了λ和ξ對(duì)f的影響。利用GA的全局搜索能力優(yōu)化λ和ξ,并從時(shí)域及頻域條件下分析了優(yōu)化前后的LQR性能,可得到如下結(jié)論:
(1)λ和ξ對(duì)f的影響并非單調(diào)的,均有一個(gè)先減小后增大的趨勢(shì),存在各自的最優(yōu)值。λ越大,對(duì)控制性能越重視,控制效果越好,但過大會(huì)超過作動(dòng)器的最大作動(dòng)力;ξ的取值不宜過大,一般在1以下最好,否則過度重視減小作動(dòng)力,會(huì)嚴(yán)重影響減振性能;
(2)優(yōu)化后的參數(shù)在降低f數(shù)值的約束下,可使LQR控制下的車身垂直加速度和車輪動(dòng)變形均方根值較優(yōu)化前分別降低6.54%和6.14%。在改善兩者矛盾關(guān)系的同時(shí),提高了主動(dòng)懸掛的乘坐舒適性和操縱穩(wěn)定性性能。該優(yōu)化權(quán)重參數(shù)的方法簡(jiǎn)單,利用GA尋優(yōu),可改善低頻條件下的懸掛振動(dòng)性能,適用于車輛工程領(lǐng)域。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44