一種新型履帶式移動平臺參數匹配計算
2018-11-28 08:40:54李年裕王天祺
機械管理開發 2018年11期
崔 智, 李年裕, 王天祺, 房 遠
(1.陸軍裝甲兵學院, 北京 100072; 2.63853部隊, 吉林 白城 137000)
引言
現如今履帶式移動平臺在工農業、軍事領域中投入使用越來越廣泛,一方面履帶式行走裝置相比輪式來說,可以平穩地在崎嶇不平道路上行駛,另一方面平臺整體的穩定性強于輪式平臺。針對傳統履帶式平臺轉向性能差等問題,本文設想出了一種新型履帶式移動平臺,主要對其內部零部件的參數進行匹配計算,以使平臺能夠有良好運動性能。
1 平臺的整體結構
該平臺的結構與現有的履帶式移動平臺極其相似,可以實現載人運動,其結構如圖1所示。平臺內部放置有電池、電機、驅動器等結構。
平臺與傳統履帶式平臺不同之處就是在履帶板上添加了可以滾動的小輥輪。履帶板的結構如圖2所示。平臺在轉向時,將原有的履帶板與地面之間的滑動摩擦力部分轉變為輥輪與地面之間的滾動摩擦力,提升了平臺的轉向性能,也減少了地面對履帶板摩擦的損耗。
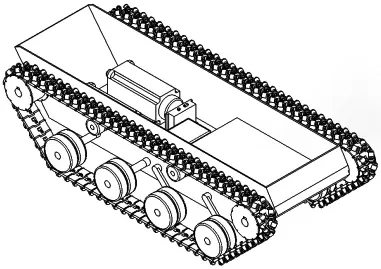
圖1 平臺整體結構
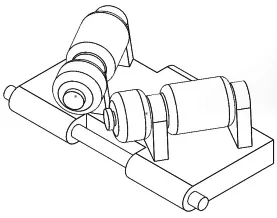
圖2 履帶板結構
2 主要零部件的匹配計算
2.1 電機的選取及參數匹配
交流異步電機結構簡單、價格低廉、運行可靠,在工農業生產中使用更加廣泛[1],因此平臺在電機的選取上選擇了交流異步電機。電機需要專門設計,根據平臺的需求,合理地選取電機的主要性能參數。
平臺在水平路面上行駛的最大速度為36 km/h,速度相對較低,因此可以忽略空氣阻力的影響[2]。若平臺以最大速度勻速行駛,電機長時間連續輸出功率為:

式中:f為地面變形阻力系數,0.05;G為平臺的重力,14162N;Vmax為最大行駛勻速,36km/h;2代表電機數量;ηch為電機輸出端到主動輪的傳動效率,0.8[3];ηx=0.95-0.003Vmax[4]。計算可得:P1≥5.26 kW。
履帶式移動平臺正常可以爬上32°斜坡,當平臺進行爬坡運動時,電機的峰值功率為:

其中,平臺的速度不宜過大,只要能保證可以順利爬上斜坡即可,因此取V0=5 km/h。計算得:P2≥7.52 kW。
由P1、P2的計算結果可知,平臺的電機功率需要同時滿足最大速度行駛和爬坡行駛,因此取:

根據上述計算功率,本文選取華盛力通公司AQHT8.5-4XX電機,其參數為:額定功率為8.5 kW,額定電壓32 V,額定電流206 A,額定轉速為1 650 r/min,最高轉速為8 000 r/min,額定轉矩為49.2 N·m,最大轉矩為70 N·m。
2.2 電池選取及參數匹配
對于該平臺來說,電池是最為核心的零部件,鋰電池具有重量輕、體積小、壽命長等優勢,因此本平臺采用鋰電池為其進行供電。
平臺運動的最大速度為36 km/h,平均速度為24 km/h,則鋰電池的功率為:

鋰電池的額定電壓取48 V,則平臺在勻速行駛時電池的額定電流為:

假設樣機平臺可以正常工作3 h,電池的利用率為70%[5],則鋰電池的容量為:

2.3 減速器的參數匹配
傳動比與電機最大輸出轉矩和最大輸出轉速有關,既要滿足電機的轉矩又要滿足其轉速特性,因此必須對傳動比進行合理的選擇。
傳動比與最大輸出轉矩的關系:

式中:r為平臺的轉動半徑,0.15 m;Tm為電機最大轉矩,70 N·m。代入式(7)中得:i≥11.61。
傳動比與最高行駛速度關系:

式中:nm為電機的最大轉速,8 000 r/min;Vm為平臺最大速度,36 km/h。帶入式(8)中得:i≤12.56。
聯立式(5)(7)得到合適的減速比 i=12。
3 結論
本文主要提出了一種可以提升履帶式移動平臺轉向性能的新型履帶式移動平臺,同時為平臺選取了合適的電機、電池及減速器,并對其參數進行了匹配,為平臺的研制及試驗奠定了基礎。