車載自組織網絡下車輛移動模型仿真測試研究
2018-11-22 12:02:54張文都
計算機技術與發展 2018年11期
關鍵詞:模型
張文都,喬 雅
(1.陜西交通職業技術學院,陜西 西安 710018; 2.西安交通大學,陜西 西安 710049)
0 引 言
目前,在車聯網技術[1]特別是車載自組織網絡技術(VANETs)的研究過程中,需要對道路上車輛的交通行為、特定事件,消息發布過程中的廣播協議、節點組網方式、路由協議等內容進行評估測試。目前主要有實地測試和仿真測試兩種方法。實地測試方法需要大量的人員及經費投入,且存在測試場景單一、可重復性差、易受環境干擾等不足,因此利用仿真平臺對車聯網的相關性能和功能展開測試,成為研究車聯網特性的一種有效手段。
在仿真測試過程中,應盡量在仿真平臺中搭建最接近真實情景的車輛移動模型進行仿真,這是因為:從宏觀角度來看,車輛的移動方式直接影響VANETs的拓撲結構,進而影響數據的轉發路徑;從微觀角度來看,不同車輛移動模型下的仿真場景中不同的區域產生的信令流量不同,對無線網絡中的干擾程度也不同。
王百里等[2]在元胞自動機NaSch模型的基礎上,通過設置跟車、換道規則,對合流區各車道車流量和車輛的換道率進行了仿真研究,然而NaSch模型是一種研究高速公路交通的典型模型,而車道合流區在城市道路中同樣存在,此外,研究過程中未考慮車輛類型對合流區車輛行為的影響。Joerer等[3]利用Veins仿真平臺對提出的基于情景感知的事故輔助方案進行測試,通過構建交叉口駛入模型,對方案在更新延時和崩潰時長兩方面的性能進行了評估,然而在其仿真測試使用的移動模型中,駛入車輛只可直行,不能轉彎,與實際交通情況差異較大。Nguyen等[4]利用NS-2仿真器,構建了在接口優先級隊列層和應用層支持DSRC協議的車輛模型,對提出的廣播框架調整算法EFAB的性能進行了評估,但其仿真場景非常單一(1 km的直線型街道),且未考慮車輛移動對廣播過程中WSA分組到達率和數據包傳輸率的影響。Zhao Haitao等[5]提出了一種改進的路由協議IGRP,旨在提高車聯網信息傳輸過程中的可靠性和有效性;測試中利用VanetMobiSim生成車輛移動軌跡,從數據包傳輸率、傳輸延時和路由負載三方面對協議進行評估,但缺乏對移動軌跡的具體描述,協議的應用場景(三車道交叉路口)也未說明車道上車流的行駛方向等信息,實際應用性還需進一步考證。
上述研究均通過構建相關車輛移動模型基于仿真測試的方法對所研究的車聯網性能進行測試,但測試過程中多采用較為簡單的車輛移動模型。考慮到實際交通的復雜性,其仿真結果的有效性大大降低,可靠度也受到影響。因此,為了系統地研究應用不同移動模型對于車聯網仿真測試的影響,文中基于Veins構建仿真平臺,在兩種常見的按需路由協議AODV(ad hoc on-demand distance vector routing)和Bypass AODV下,對應用隨機游走模型、隨機駐留點模型、隨機方向移動模型、參考點群移動模型和曼哈頓移動模型等不同的交通模型時VANETs的性能參數進行測試和分析,從而研究不同移動模型對車聯網仿真結果的影響。
1 典型車輛移動模型
1.1 常見車輛移動模型
1.1.1 隨機移動模型
隨機移動模型[6]主要有三種,分別是隨機游走模型、隨機駐留點模型和隨機方向移動模型。
隨機游走模型(random walk mobility model,RW)中車輛節點從當前位置移動到下一新的位置的準則是:隨機選取移動的方向和移動速度。車輛節點的移動角度范圍為(0,2π),移動速度范圍為(0,νmax),當車輛節點移動到仿真邊界處時,以與當前相反的方向繼續在仿真場景中移動。
隨機駐留點模型(random waypoint mobility model,RWP)也稱為隨機路點模型,模型中車輛節點的移動通過隨機選取目標位置來驅動,當目標位置選定時,車輛節點即在(0,νmax)范圍內以恒定的速度駛向目標位置。車輛節點到達選定目標位置后,在該位置駐留一段時間Tpause,之后再隨機選定下一個目標位置。通過不斷調整節點的目標位置,實現車輛的持續移動。
隨機方向移動模型(random direction mobility model,RDM)中車輛節點的移動規則是,隨機選取一個移動方向,直至車輛到達仿真區域邊界,在該邊界位置處駐留一段時間Tpause后再隨機選定下一個行駛方向。
1.1.2 參考點群移動模型
參考點群移動模型[7](reference point group mobility model,RPGM)中,移動節點在仿真區域內形成特定群組,每個群組有一個簇頭以決定群組內成員的移動行為。簇頭節點作為群組的參考點,其移動過程中的軌跡參數Vleader(t)和θleader(t)的隨機偏差,將決定群組成員節點的移動速度Vmenber(t)和移動方向θmenber(t)隨機移動。
1.1.3 曼哈頓移動模型
曼哈頓移動模型(Manhattan mobility model,MAN)用于模擬移動節點在由地圖定義的道路上的移動性。在該模型中,有水平和垂直的街道,而且每個街道在每個方向上有兩個車道。車輛節點直行、左轉、右轉的幾率是0.5、0.25、0.25。
1.2 車輛移動模型特性對比
上述車輛移動模型中,隨機移動模型均針對車輛節點個體進行模擬,除了隨機方向模型主要應用于有邊界場景,其他兩種模型均對仿真場景無特殊要求。此外,RW和RDM模型中車輛間的相關程度較弱,無法準確刻畫實際的交通狀態,相對而言,RWP模型在有邊界的區域進行仿真時,無論仿真初始時刻車輛節點在空間上屬于何種分布,隨著仿真的進行,都將逐步達到均勻分布的穩定狀態[8],適合對車聯網中車輛移動的模擬。
參考點群移動模型中車輛間相關性較強,與隨機移動模型相比,更能反映實際交通情況,特別是簇頭節點使用隨機游走模型時,會降低群組節點間的時間相關性,進而影響其逼近真實的節點運動狀態[9],但算法復雜度也相對較高。
此外,曼哈頓移動模型的應用場景與真實城市交通存在明顯差異,在對路由協議性能進行仿真測試時,往往造成無法調整的誤差,文中將通過測試對這種影響進行分析。
2 典型路由協議
2.1 無線自組網按需平面距離向量路由協議AODV
無線自組網按需平面距離向量路由協議AODV(ad-hoc on demand vector routing)[10]的執行過程由兩部分組成,分別是路由發現和路由維護。路由發現主要完成數據源節點到目的節點的路由建立工作;路由維護主要完成數據傳輸過程中鏈路質量的檢測和修復。
2.2 改進型路由協議Bypass-AODV
Bypass-AODV協議通過改進AODV協議的路由維護過程,實現網絡連接的穩定性優化[11]。首先,Bypass-AODV利用跨層MAC通知對移動相關數據丟失的情形進行識別,然后,觸發路由層,從而啟動本地修復進程。通過為斷開鏈接的上游節點設置一個旁路,并對旁路路由的搜索區域進行限制,在控制路由長度的前提下降低數據由于鏈路連接問題而引發的丟包。
Bypass-AODV作為AODV協議的改進方案,具有AODV協議的優點,即作為一種反應式路由協議,當且僅當源節點向目的節點發送消息時,才會觸發兩種協議執行路由發現這一過程,相比先驗式路由協議中通過周期性廣播路由信息更新和維護路由表過程,能夠大大降低網絡中的數據包數量。
考慮到Bypass-AODV和AODV均在時間復雜度、路由框架和報文設計等方面具有較為靈活的配置方案,這兩種協議被作為車聯網協議應用廣泛。文中通過對比這兩種路由協議在仿真中的性能,研究不同車輛移動模型對車聯網測試結果的影響。
3 仿真環境及測試方案配置
3.1 仿真環境構建
文中使用Veins仿真平臺對比不同移動模型對VANETs路由協議性能測試的影響。Veins仿真平臺通過耦合網絡仿真器OMNET++和交通仿真器SUMO,能夠較為真實地模擬車聯網中的交通情景和網絡性能[12]。
利用交通仿真器SUMO構建車輛移動模型時,需要綜合考慮模型應用的路網拓撲場景、車輛屬性等因素,從而使仿真測試具有可比性。文中構建了范圍為1 600 m×1 600 m的網格狀城市道路場景作為測試仿真場景。同時,由于隨機游走模型、參考點群移動模型和曼哈頓移動模型中車輛在做出下一步移動計劃之前,無需像隨機駐留點模型和隨機方向移動模型一樣在當前位置保持靜止,故將隨機駐留點模型和隨機方向移動模型中涉及的駐留時間Tpause設為0。此外,為了對比不同車速條件下路由協議的性能,設置了多組最高車速限定。搭建的仿真場景基本的交通參數設置見表1。
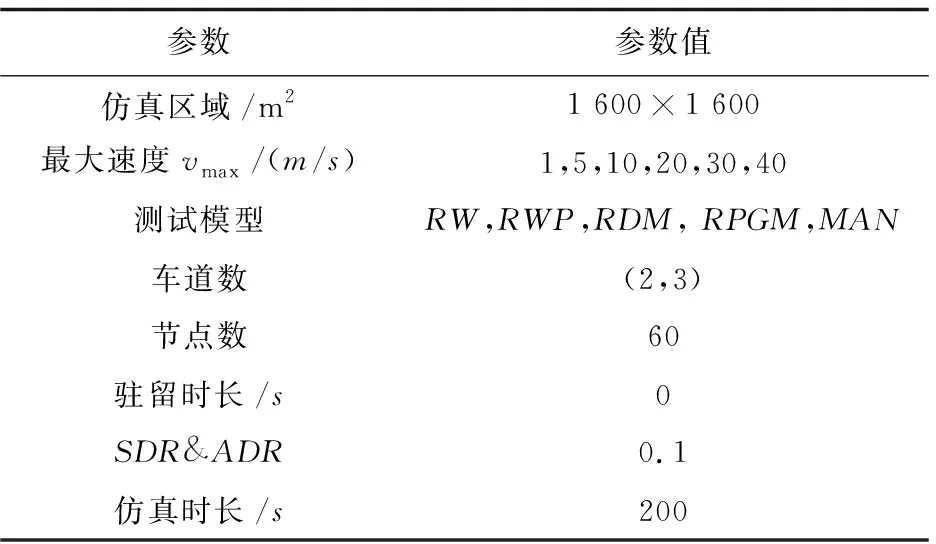
表1 交通仿真參數設置
網絡仿真器OMNET++用于模擬車輛節點構建自組網絡并進行數據通信。物理層模型支持IEEE802.11p協議,MAC層支持IEEE1609.4,信號傳播模型使用自由空間傳播模型,以信號能量強度決定數據幀能否正常傳輸至目標節點,選擇傳輸控制協議TCP用以完成面向連接的通信[13]。
網絡仿真參數的設置見表2。
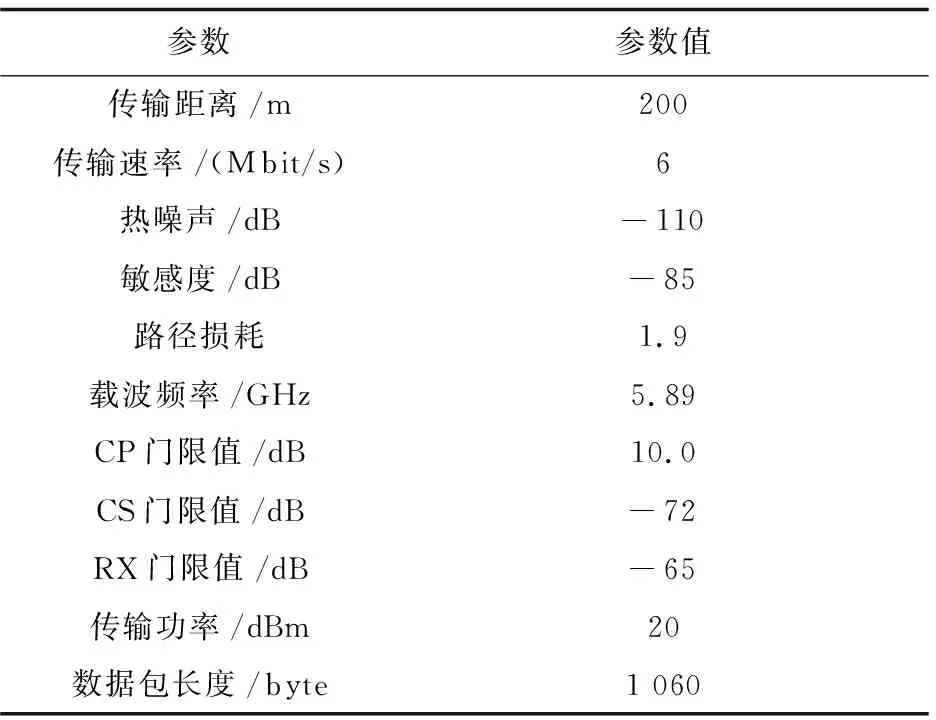
表2 網絡仿真參數設置
3.2 測試方案
從通信連接長度和TCP有效吞吐量兩方面[14-15],研究了不同移動模型對路由協議性能的影響:
(1)通信連接長度測試。根據1.2小節,隨機駐留點模型相比其他兩種隨機移動模型,具有更高的真實匹配度和較低的算法復雜度。為了簡化實驗,本節選取隨機駐留點模型,將之與參考點群移動模型和曼哈頓移動模型進行性能對比。通過統計場景中車輛節點間建立的TCP連接長度,從網絡層面初步分析三種車輛移動模型對協議性能測試結果的影響。
(2)TCP有效吞吐量測試。有效吞吐量是指在吞吐量的基礎上,去掉開銷之后,傳輸有效內容的吞吐量,不包含協議開銷和數據包重傳數據,比吞吐量更能真實反映不同路由協議下車聯網應用層的性能。通過構建特定的應用場景,并分別測試多種移動模型下路由協議所表現的網絡吞吐量性能,對比分析了車輛移動模型對路由協議性能測試的影響。
4 測試結果及分析
4.1 通信連接長度測試
通信連接長度能直觀地反映出不同車輛移動模型對網絡拓撲結構的影響。考慮到TCP協議中,車輛進行數據收發前需通過握手建立節點間的通信連接,因此,車輛移動模型中車輛節點間的位置、速度和節點間的聯系將直接影響建立的連接長度。通過在仿真場景設定多個車輛的最大行駛速度,對比了AODV 協議下三種不同車輛移動模型(RWP、RPGM、MAN)對通信連接長度的影響。不同通信連接長度在總連接數中的占比統計結果如圖1所示。
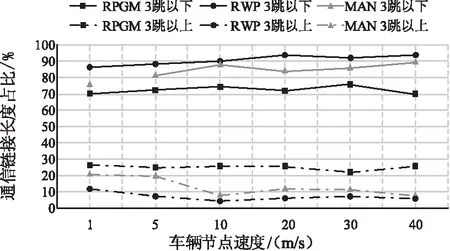
圖1 通信連接長度測試統計
可以看出,對RWP和MAN而言,長度較短的通信連接長度受車速的影響較小,而通信連接長度達到4跳或以上的連接,其占比隨著車輛最大行駛速度的不斷增大存在明顯的下降,這是因為速度越快,節點間的拓撲結構變化越快,越不利于保持穩定的通信連接;而RPGM中連接長度隨著車輛速度的增加起伏并不大,這是因為該模型中節點的移動相互影響和限制,即使速度上升,節點網絡拓撲變化卻相對較小。也就是說,相比RWP和MAN,RPGM在給定的車聯網場景中能夠建立更穩定的、連接長度更長的網絡拓撲結構。
4.2 TCP有效吞吐量測試
4.2.1 隨機移動模型有效吞吐量測試
在仿真環境中,車輛基于車輛移動模型運動,進而造成自組網絡的拓撲結構的改變。為了研究這一改變對路由協議性能的影響,在仿真場景中設定了五組固定的通信對,分別作為數據源節點和目的節點,調整通信對間的距離,然后使源節點與目的節點建立不同跳數的通信連接。考慮到數據從源節點向目的節點傳輸的過程中,需要經過中間節點對數據進行轉發,該過程中造成數據傳輸鏈路斷開的因素主要是中繼節點的移動,這樣,通過改變通信對間的距離即可研究由節點移動引發的鏈路連接或斷開對路由協議的影響,進一步反映不同車輛模型對路由協議測試結果的影響。
設定車輛節點的數據傳輸范圍為200 m,感知范圍為400 m,車輛最大行駛速度為20 m/s。位置相對固定的通信對間間距以傳輸范圍為準,分別設置為200 m、400 m、600 m、800 m、1 000 m、1 200 m。隨機移動模型在不同連接跳數條件下的有效吞吐量統計情況如圖2所示。
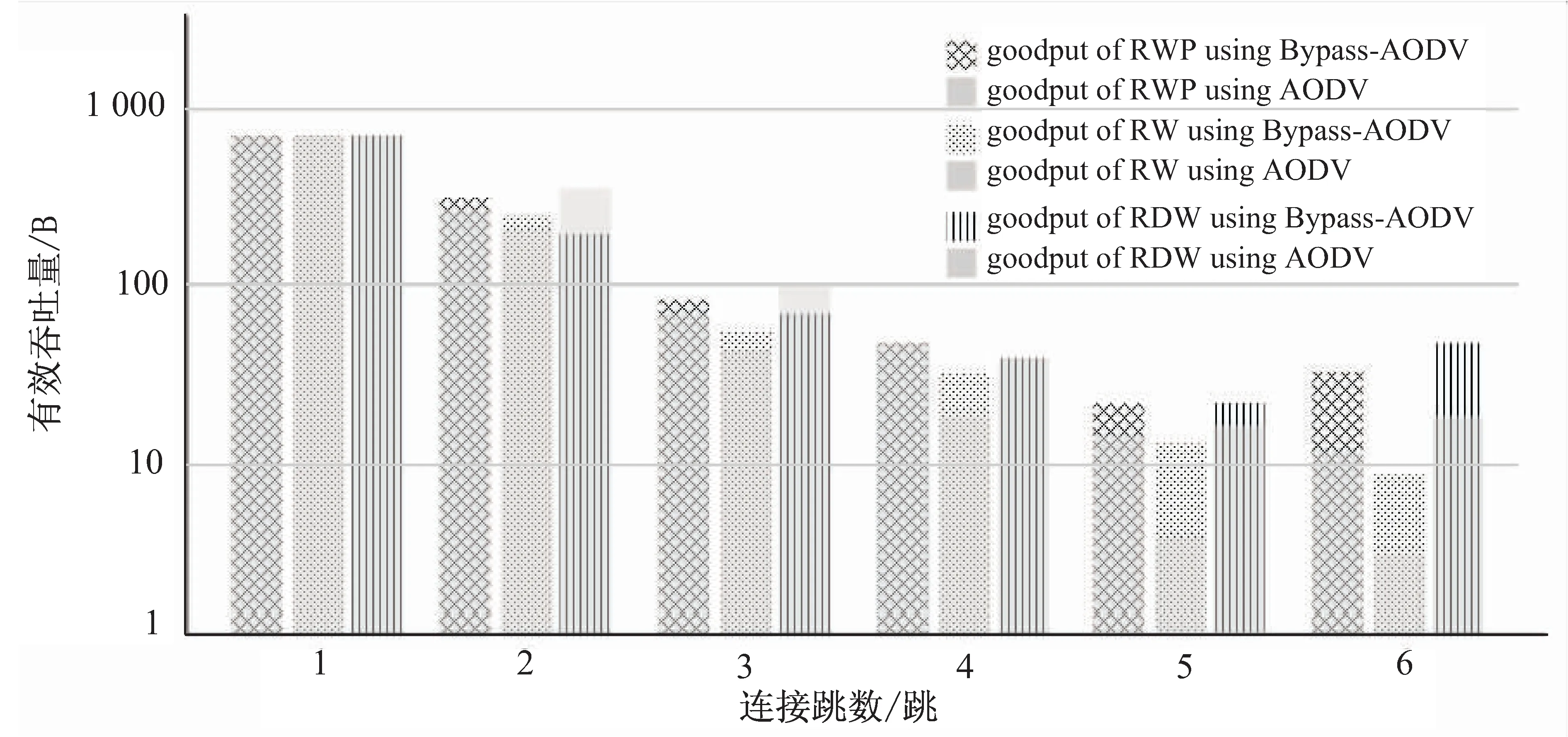
圖2 有效吞吐量統計(1)
可以看到,當源節點與目的節點的距離很近(相距200 m,源節點與目的節點以單跳直接連接)時,三種移動模型在Bypass-AODV和AODV協議下產生的有效吞吐量差別很小,這是因為源節點和目的節點始終保持單跳連接,能夠穩定通信,不存在中間節點運動造成通信鏈接斷裂的情況;隨著兩節點間距離的逐漸增加,三種移動模型產生的有效吞吐量持續減少,這是因為利用中繼節點傳輸數據時,依照IEEE802.11p MAC中的規定,節點在感知范圍內通信時共享傳輸媒介,即每刻僅允許一對節點通信,因此任一中間節點的移動都可能造成仿真場景中鏈路的斷開,當中間節點數目變多,鏈路斷開的概率增大,勢必導致有效吞吐量的下降。
同時,采用AODV協議進行數據傳輸,且源節點與目的節點間的連接大于3跳時,與采用RW模型相比,采用RWP模型和RDM模型時的有效吞吐量呈現較緩的降低,這主要是因為RWP和RDM模型中的車輛在短時間內更易產生相對穩定的移動軌跡(單一目的、單一方向),降低了場景中由于車輛突然調整行駛方向導致的鏈路斷開。
此外,Bypass-AODV協議在一定程度上改善了3跳及以上連接時三種移動模型表現出的有效吞吐量,特別是RWP模型,相比RDM模型更能反映出Bypass-AODV協議對有效吞吐量較大幅度的提高。這首先是因為對RWP模型,車輛節點在設定目標后的移動過程中行駛路線較為靈活,而RDM模型中的車輛節點在仿真場景中行駛的路線較為單一,不利于Bypass-AODV為斷裂的鏈路建立連接旁路;其次,三跳以上的連接中,源節點和目的節點開始出現在仿真邊界,考慮到RDM模型中的車輛行駛終點為仿真邊界,大量的車輛匯聚在邊界處,相比RWP模型中更易形成的均勻的車輛節點分布,不利于建立邊界到邊界的連接鏈路。考慮到RWP模型能夠產生相對多的有效吞吐,又能反映路由協議對吞吐量的提高情況,文中利用RWP模型和PRGM模型、MAN模型進行后續的對比。
4.2.2 RWP和RPGM有效吞吐量測試
本節通過對比RWP和RPGM兩種移動模型,研究路由協議性能測試對仿真環境中采用的移動模型的依賴性。在構建RPGM模型時,以15個節點為一組,每個節點以重疊的方式獨立自主移動。不同車輛移動速度下的TCP有效吞吐量如圖3所示。
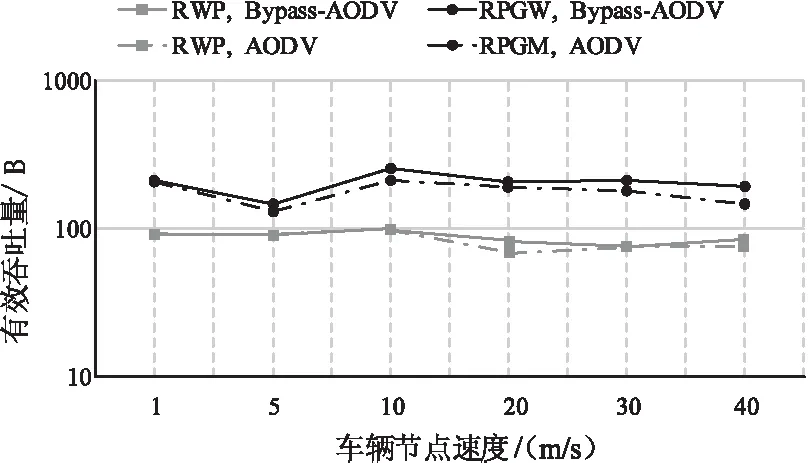
圖3 有效吞吐量統計(2)
與RWP相比,RPGM移動模型中的有效吞吐量明顯較大,這主要是因為RPGM模型的空間依賴特性增長了鏈接的生存時間。同時,對同一種移動模型而言,使用AODV和Bypass-AODV帶來的區別并不明顯,這主要有兩方面的原因。一是兩種路由協議在大多數情況下都保持了較多的短鏈接;二是盡管Bypass-AODV能夠通過建立路由旁路減少后續傳輸的數據包,由于旁路路由作為臨時路由僅能存在有限的時間,一旦傳輸完緩沖的數據包后即會啟動新的路由發現機制,因此使兩種協議的差別不大。此外,當車輛移動速度增加至40 m/s時,RPGM移動模型中不同路由協議下的有效吞吐量差別較為明顯,這主要是因為速度的增長加大了群組間重疊的可能性,當端點存在于不同的群組中時,這種重疊會在物理層面上縮短鏈接端點間的距離,從而提高有效吞吐量。
4.2.3 RWP和MAN有效吞吐量測試
本節主要對RWP和MAN的有效吞吐量進行測試對比。兩模型的有效吞吐量統計如圖4所示。
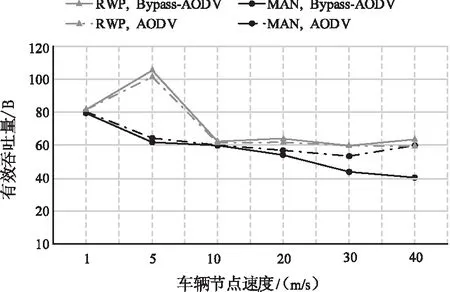
圖4 有效吞吐量統計(3)
對移動模型RWP和MAN而言,除去異常點(RWP模型5 m/s處),兩種模型的有效吞吐量均隨速度的增加呈現逐步下降的趨勢,這是因為車輛節點的高速移動會造成鏈接失效數量和相應的重建旁路數量的增加;同時,RWP模型下Bypass-AODV協議表現的性能要比AODV表現的性能稍高,而MAN模型下的Bypass-AODV協議性能卻比AODV稍低,且在速度到達10 m/s后呈現較大幅下降,這主要歸結于MAN模型下通過短跳連接完成的數據傳輸比例過低(見通信連接長度測試部分),而3跳以上的連接中數據傳輸的失敗概率較大。此外,MAN模型相比RWP模型在兩種路由協議下均表現出了更低的有效吞吐量。
總體而言,在當前場景中,RPGM模型能夠建立更穩定的通信連接,具有更高的有效吞吐量,且能夠更加直觀地反映不同協議的性能。考慮到RPGM模型在維持車輛以群組方式移動時需要額外的開銷,實際應用中該移動模型對冗余度的影響還需要進一步進行研究。
5 結束語
為了系統地研究不同車輛移動模型對于車聯網環境的適應性,選取了五種常見的車輛移動模型,利用Veins仿真平臺搭建了網格狀城市道路場景,結合路由協議AODV和Bypass-AODV,從通信連接長度、TCP有效吞吐量兩方面展開研究。測試結果顯示,RPGM模型在給定場景中能夠建立更多的多跳連接,且能產生更多的有效吞吐量,同時,能夠更為直觀地反映出不同路由協議性能的差別。
考慮到仿真測試結果的可靠性,針對不同的車輛移動模型,引入更多的測試參數(車流密度,駕駛員行為系數),更多的車輛行駛行為(變道車輛,合流區車流行為),精細化測試變量,將是下一步主要的研究方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19