基于動態插值自適應方法的時變軸系縱向振動主動控制
2018-11-21 10:40:22鄭洪波張志誼
振動與沖擊 2018年21期
鄭洪波, 覃 會, 胡 芳, 張志誼,3
(1.上海交通大學 機械工程與動力學院,上海 200240; 2. 武漢理工大學 材料科學與工程學院,武漢 430070; 3.上海交通大學 高新船舶與深海開發裝備協同創新中心,上海 200240)
對于海洋船舶而言,螺旋槳脈動力會通過軸承引起船體結構振動和水下聲輻射。除轉向等特殊情況之外,螺旋槳受到的縱向脈動力遠大于其它方向的脈動力,縱向振動遠大于橫向振動,所以控制推力軸承的縱向振動向船體的傳遞,能夠有效減小船體結構振動和聲輻射[1]。現有的振動控制研究主要包括被動和主動兩種控制方法,如動力吸振器和共振變換器[2-4]。一些主動控制方法如速度反饋控制和最優控制也用來抑制振動從軸系傳遞到船體[5-8]。在這些研究中,軸系被視為一個時不變系統。然而研究表明,推進軸系的動態特性會隨著轉速的變化而變化[9-10],這是由推力軸承油膜縱向剛度會隨轉速變化導致的,所以在設計控制方案時,必須考慮系統的時變動態特性。
文獻[11]提出一種自適應反饋控制策略,通過調整反饋增益來補償大相位誤差,從而避免了時變系統的辨識,但是這種方法僅對已知的周期激勵有效,并且收斂速度較慢。文獻[12]提出自增益調度H∞控制方法,設計出一個時變的H∞控制器,這種控制方法是基于可獲得的參數化系統模型,而實際上很難通過系統辨識的方法得到軸系參數化模型。文獻[13]提出用切換控制結構,針對不同時變參數下的系統設計出一個模型參考控制器集,控制過程中根據系統特性的變化進行控制器切換,這種方法要求系統必須可控,辨識出的子系統傳遞矩陣嚴格正則并且滿秩,系統離散時間狀態空間矩陣需要滿足相應的關系方程。
本文針對動態特性時變的推進軸系,提出一種動態插值自適應控制方法,利用動態插值算法來更新補償器,補償系統動態特性的變化,并根據最小均方算法最小化誤差信號。利用這種控制方法進行數值仿真,并與無插值自適應控制時的系統響應進行對比,檢驗控制方法對時變系統振動的抑制效果。
1 參數時變推進軸系統模型
為了模擬時變軸系的縱向振動特性,建立如圖1所示的振動模型,其中螺旋槳等效為有阻尼彈簧振子(圖中M1,k1,c1),軸采用彈性桿模擬,推力軸承采用集中質量M2代替,兩者用彈簧和阻尼器(黏性阻尼)連接,并且剛度k2[n(t)]隨轉速n(t)變化。推力軸承與剛性基礎之間通過彈簧和線阻尼器(黏性阻尼)連接,縱振簡化模型參數如表1所示。
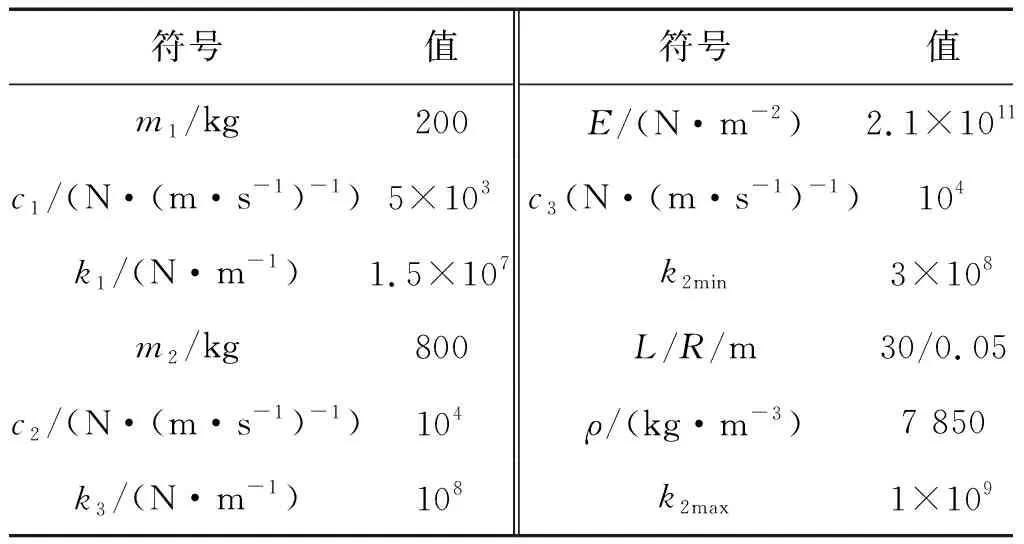
表1 縱振模型參數Tab.1 Parameters of the longitudinal vibration model

圖1 軸系縱向振動模型Fig.1 Vibration model of the shafting system
兩端自由的均質桿的縱向振動可以由二階非齊次偏微分方程描述[14]
(1)
自由端處桿的應力為零,相應的邊界條件為
(2)

(3)
式中:ω為激勵力頻率。軸的縱向振動固有頻率和振型滿足下列特征方程
(4)

對于兩端自由的軸,固有頻率和振型為
n≥0
(5)
根據振型疊加法,縱向振幅可以表示成無窮多個主振型的線性組合,即
(6)
將式(6)代入式(3),得
n≥0
(7)
由式(4)和式(7),可以得出
n≥0
(8)
(Kn-Mnω2)cn=Fn
(9)

由式(9)可以求出cn。將cn代入式(6),得到軸的縱振幅值
(10)
(11)
根據式(11),如果取縱向振動的前五階主振型,桿端點的原點和跨點頻響函數可近似為
(12)
將圖1所示的模型分為三個部分,如圖2所示。
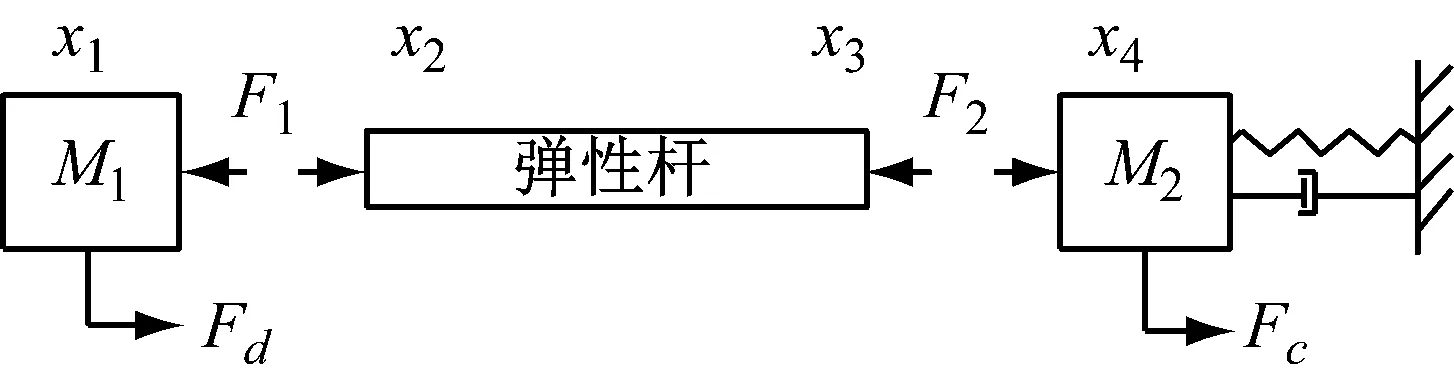
圖2 模型分解與分析Fig.2 Model decomposition and analysis
M1的載荷-位移方程
(13)
彈性軸的矩陣方程
(14)
M2的載荷-位移方程
(15)
式中:j為復數的虛部。
聯結處力平衡方程
(16)
聯立式(13)~式(16)可得到系統位移與外力的關系方程
(17)
在矩陣方程式(17)中,令Fd=0求控制通道模型,再令Fc=0求干擾通道模型
當推力軸承剛度取不同值時,控制通道Hc的幅值和相位曲線圖3所示,由圖可知,縱向振動固有頻率會隨著推力軸承剛度的增加而增加,并且第四階固有頻率變化范圍為136.7~148.7 Hz,第五階固有頻率的變化范圍為207.8~226.4 Hz,最大頻率偏移18.6 Hz,最大相位誤差172.5°。
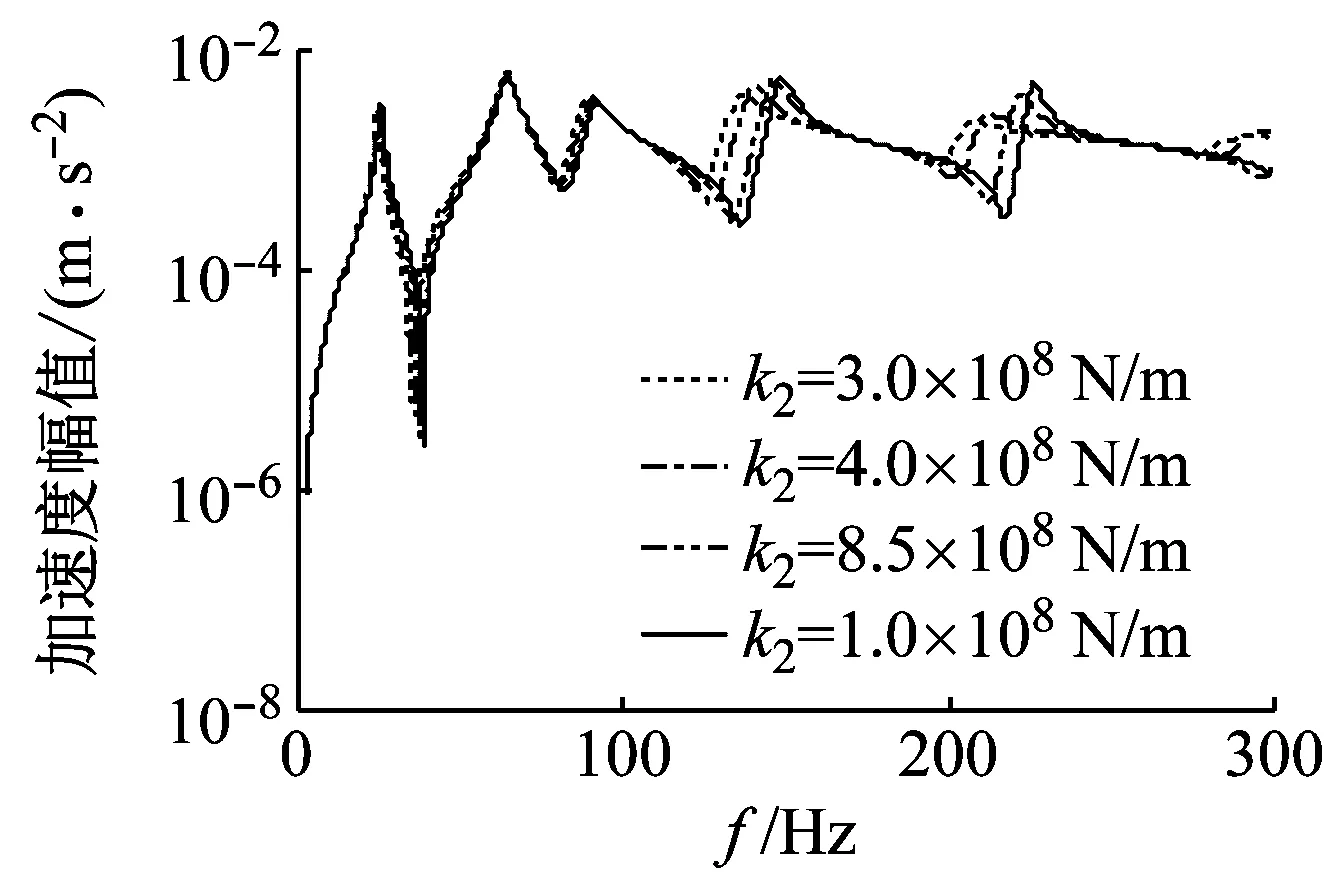
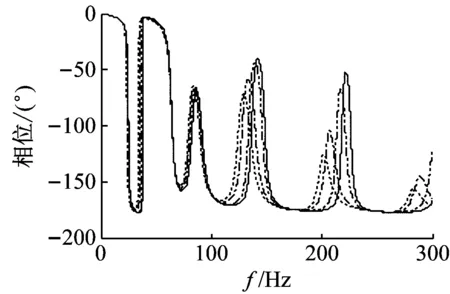
圖3 不同參數下控制通道的頻響函數Fig.3 FRFs of the control channel at different parameters
2 動態插值自適應控制方法
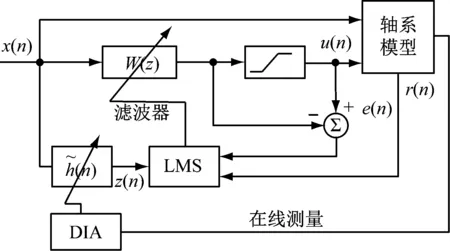
圖4 動態插值自適應控制方法框圖Fig.4 Block diagram of the dynamic interpolating adaptive control
在控制算法推導過程中,每一個時刻均視為定常系統。在圖4中,W(z)是一個N階FIR自適應濾波器,通過矩陣相乘可以得到u(n)
u(n)=XT(n)w(n)
(18)
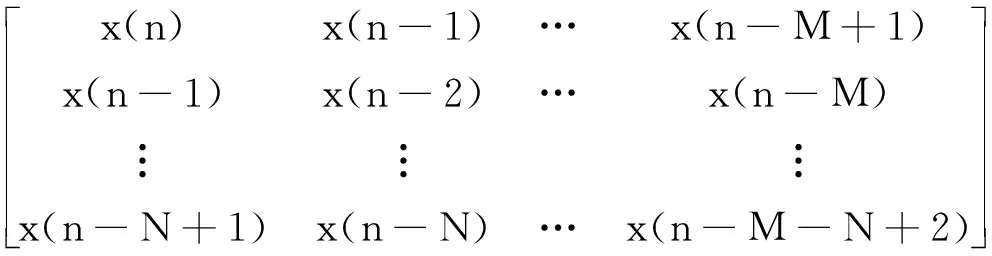
式中:X(n)為一個N×M階矩陣。
X(n)=[x(n)x(n-1) …x(n-M+1)]=

在n時刻,僅在控制力作用下,系統的輸出為
(19)
式中:h(n)為n時刻控制通道的脈沖響應序列。
將式(18)代入式(19)可得
y(n)=[XT(n)w(n)]Th(n)=wT(n)X(n)h(n)
在控制之前,利用模態辨識方法得到不同轉速下控制通道的脈沖響應序列,再利用Lagrange插值方法對這些數據擬合得到時變的補償器模型序列。為保證算法的穩定性,不同時刻的補償器模型與控制通道模型的頻域相位誤差不能超過90°[15],相位誤差越小,控制效果越好。在控制過程中,DIA根據在線測的轉速信號來動態的調整補償器模型序列。通過合理的選擇插值點,使得補償器模型和控制通道模型等價,即
(20)
式中:C(n)為一個P×M階矩陣。
L[r(n)]為插值基函數向量
lk(r)=
式中:rk為選取的插值點。
經補償器濾波后的參考矢量為

X(n)CT(n)L[r(n)]
則
y(n)=wT(n)z(n)=wT(n)X(n)CT(n)L[r(n)]
式中:z(n)為N×1階矢量,即
令n時刻干擾作用下產生的干擾信號為d(n),則誤差信號e(n)為
e(n)=d(n)-y(n)
根據誤差信號均方值最小準則,代價函數J(n)為
J(n)=E[e2(n)]=E[(d(n)-y(n))2]
將誤差信號的均方值替換為瞬時平方值,進行梯度的近似估計

由此得到濾波后LMS算法的權矢量的迭代公式
w(n+1)=w(n)+2μe(n)z(n)
(21)
式中:μ為步長參數,用于迭代步長的調整。
為了加快控制算法的收斂速度,采用歸一化LMS算法,并加入飽和抑制單元[16],考慮這兩個因素后的自適應濾波器權矢量的迭代公式
(22)
式中:μ為步長參數或收斂因子,用于自適應迭代步長的調整,0<μ<1,γ>0;Su為Sigmoid函數的一階導數。
3 縱向振動控制數值仿真
3.1 數值仿真參數
在推進軸系中,推力軸承的縱向剛度會隨著轉速的增加而減小。為模擬這種動態特性,假設模型中推力軸承的縱向剛度與轉速關系式如下
k2=6.50×108+3.55×108cos(0.022r)+
4.18×107sin(0.022r)(N/m)
轉速隨時間的變化軌跡為
推力軸承縱向剛度和軸速隨時間的變化如圖5所示,轉速先線性增加,再保持不變,最后線性下降。
數值仿真過程中,采樣頻率為2 048 Hz,自適應濾波器的階數40,飽和單元的閾值為6 000 N,仿真總時間70 s。 Lagrange插值方法選取的插值點數為7,根據不同插值點對固有頻率偏移的影響程度,選擇合適的插值點,如圖5中所示,星號和圓圈分別表示插值算法中剛度和軸速對應的插值點,其中轉速的插值點為1.1 r/min,37.5 r/min,49.4 r/min,70.0 r/min,96.0 r/min,111.4 r/min和150.0 r/min。
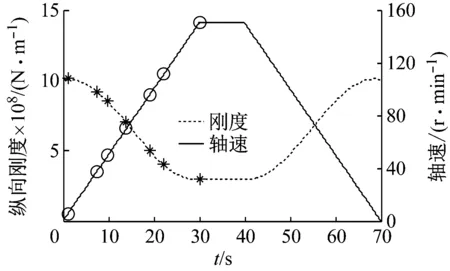
圖5 縱向剛度和軸速的時間變化歷程Fig.5 Trajectory of the longitudinal stiffness and shaft speed
3.2 雙頻激勵下的控制效果
由圖3可知,第四和五階固有頻率偏移較大,為驗證動態插值自適應方法對這種動態特性時變的系統的控制有效性,采用雙頻干擾激勵,并且兩個激勵頻率142 Hz和216 Hz,分別位于第四和第五階固有頻率變化范圍中間。干擾為
x1=250sin(2πf1)+250sin(2πf2)(N)
有、無插值算法的自適應控制仿真結果如圖6所示,由圖可知,動態插值自適應控制方法能有效的抑制推力軸承的縱向振動,加速度RMS值由12.7g降低到0.2g;在無插值自適應控制下,系統的加速度響應會比無控制下還要大。
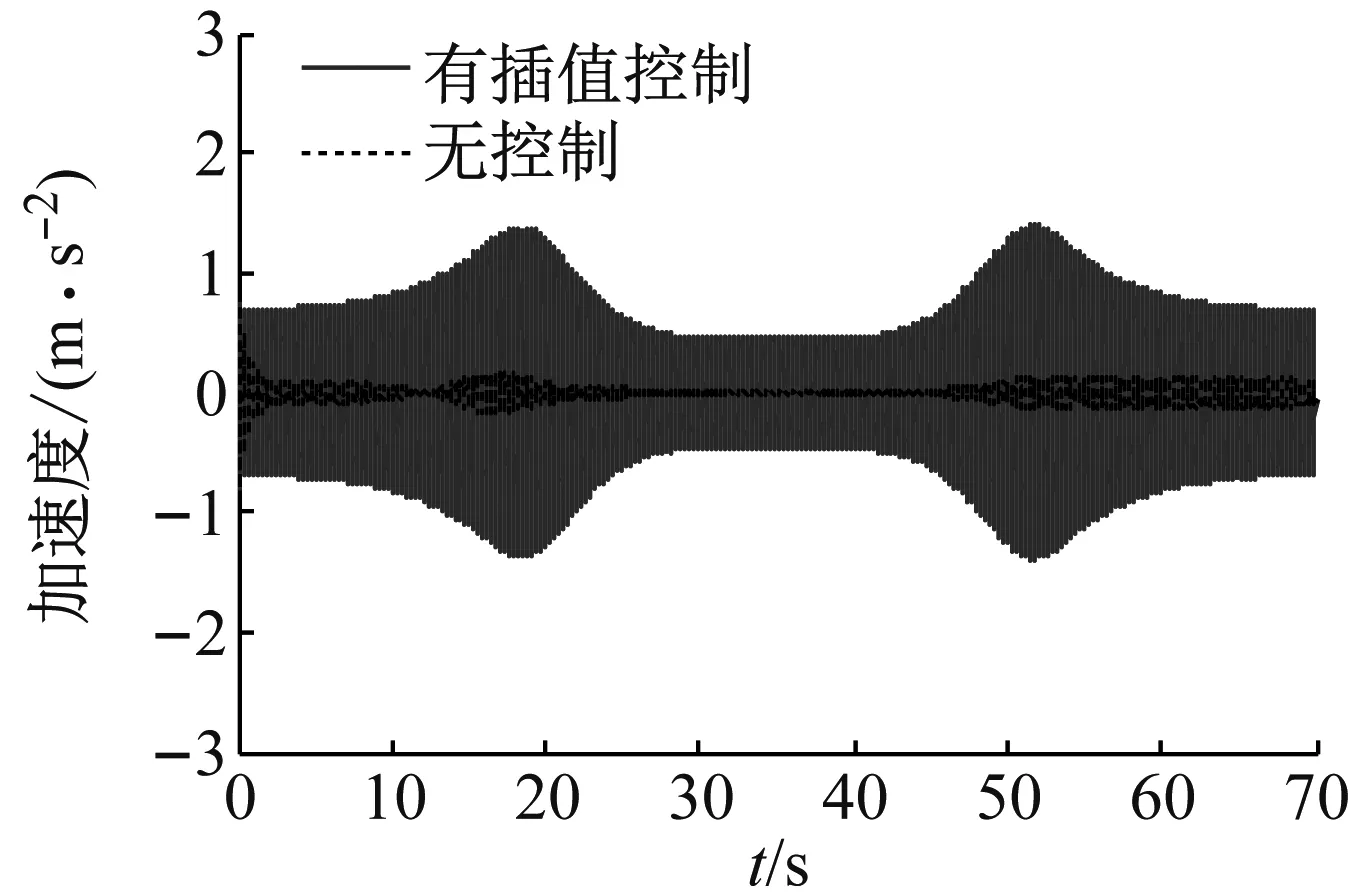
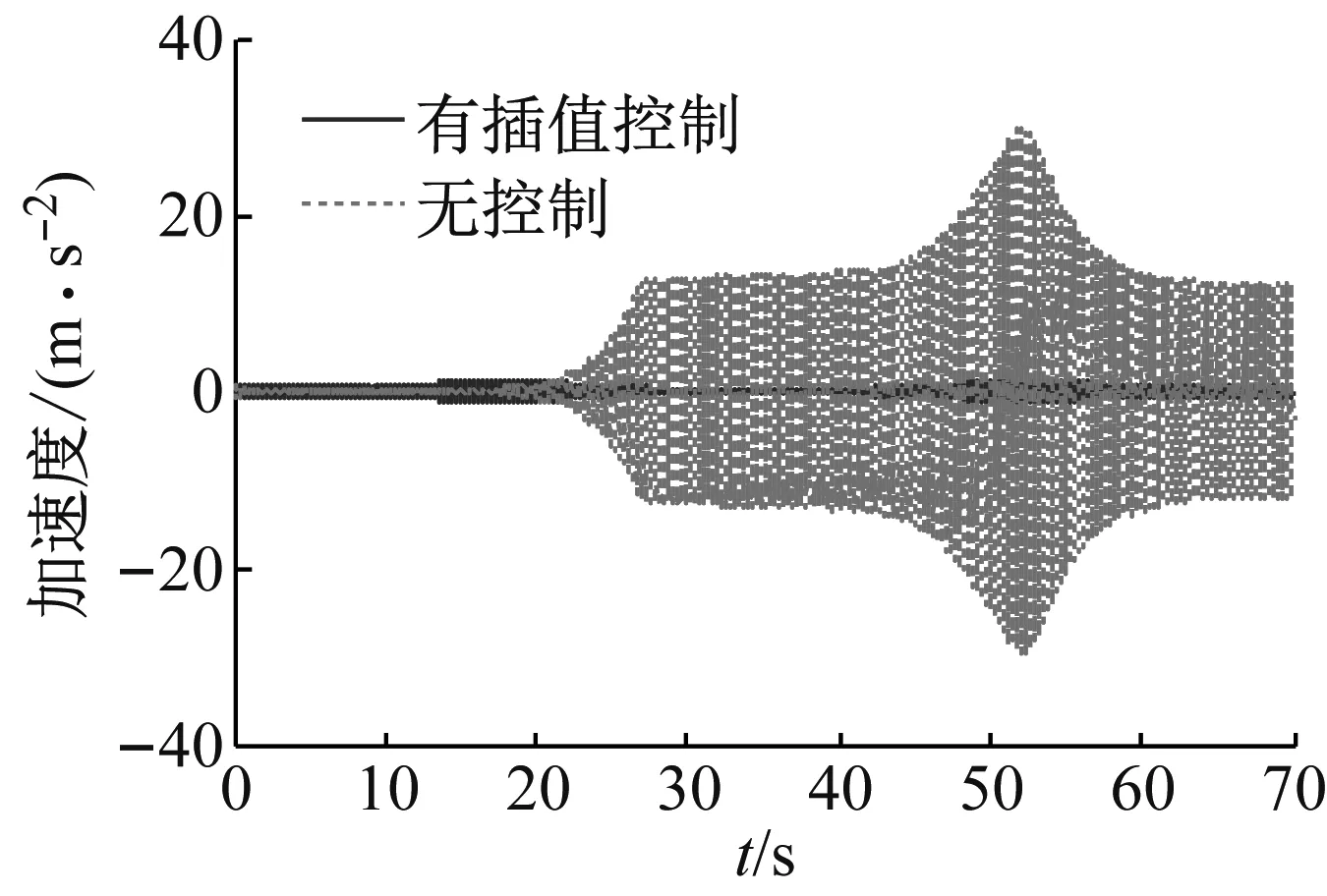
圖6 加速度時域響應Fig.6 Acceleration response in time domain
3.3 倍頻激勵下的控制效果
考慮船舶運行過程中,螺旋槳會受到葉頻激勵力,激勵頻率會隨轉速變化
f=MNr(t)Hz
式中:M=8是螺旋槳的葉片數;N=11是螺旋槳葉頻的倍數,假設干擾力大小為
x2=500sin[2πMNr(t)](N)
有、無插值算法的自適應控制仿真結果如圖7所示,在插值控制下,振動得到有效控制,推力軸承加速度RMS值由21.7g降低到2.9g;在無插值控制下,在穩態運行狀態區間響應變大,其它區間有控制效果。
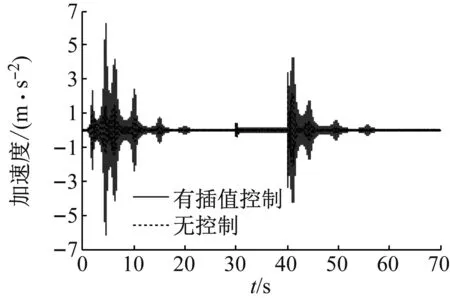
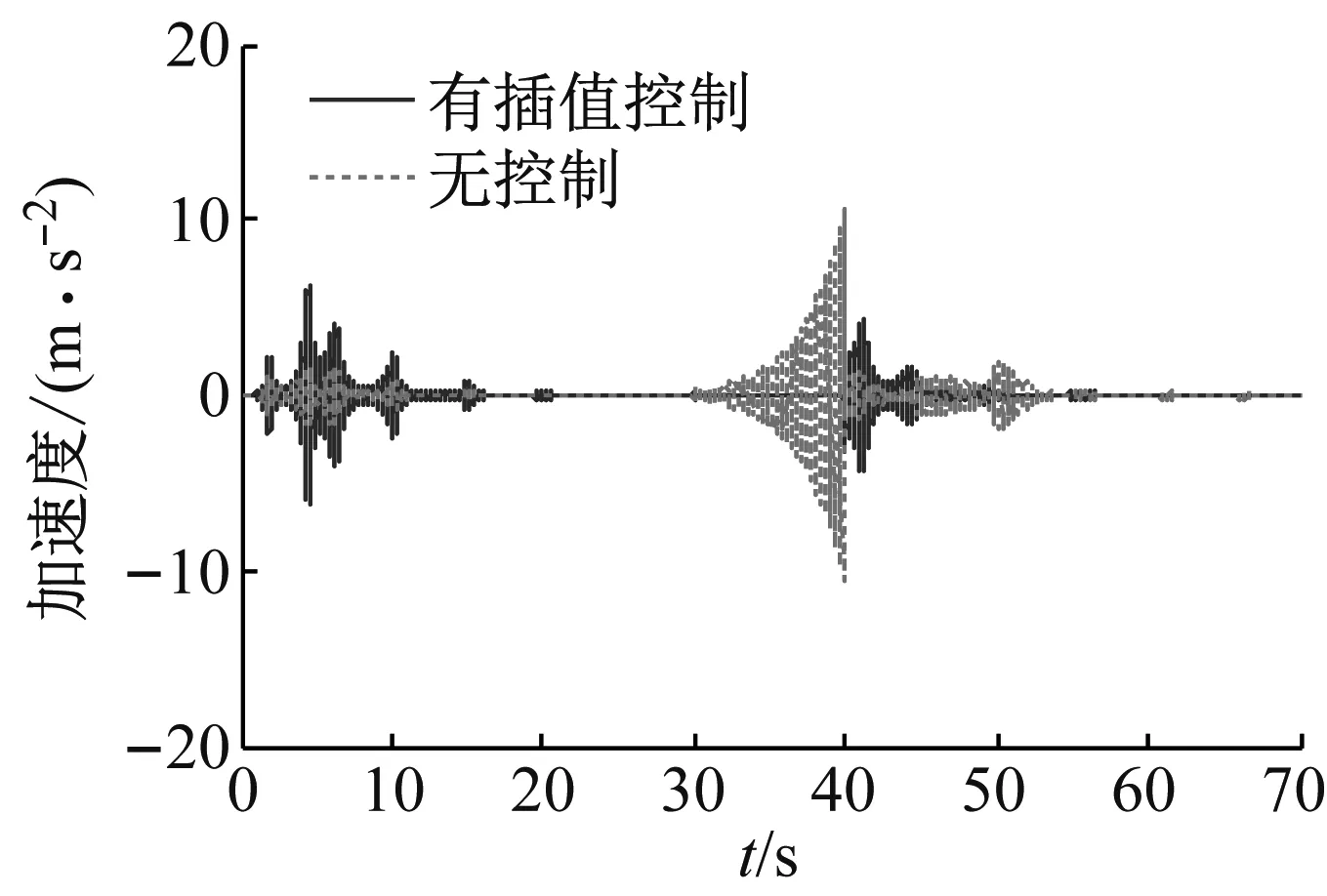
圖7 加速度時域響應Fig.7 Acceleration response in time domain
3.4 控制仿真結果總結與分析
無論在單頻還是倍頻激勵下,動態插值自適應控制方法均能夠有效抑制推力軸承的縱向振動,特別是在定轉速運行狀態下(30~40 s),33 s時加速度幅值分別降低為無控制下幅值的2.4%和1.26%,算法收斂速度較快。在這兩種不同激勵下,無插值的自適應控制方法使得系統振動加劇,這是由于選取的定常的補償器模型和時變的控制通道模型誤差較大導致的。在仿真到40 s時,動態插值自適應算法中的時變補償器模型、自適應算法中的補償器模型和時變的控制通道模型的頻響函數如圖8所示,時變補償器的頻響函數幾乎和控制通道的頻響函數相同,所以控制效果非常好。
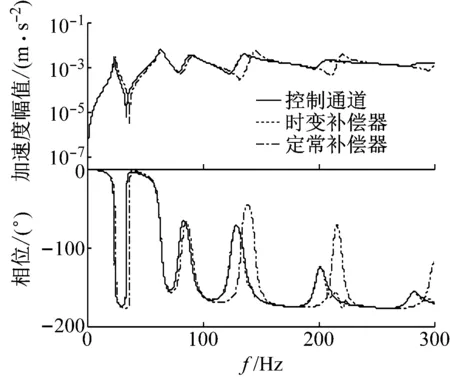
圖8 三個不同模型下的頻響函數Fig.8 FRFs of three different model
4 結 論
本文建立了推進軸系縱向振動的簡化模型,并根據建立的頻域矩陣方程求得控制通道和干擾通道的頻響函數。針對所建立的縱向振動模型,進行數值仿真。仿真結果表明:在系統動態特性變化較大的情況下,動態插值自適應控制方法能夠有效抑制推力軸承的縱向振動,且避免了無插值控制算法導致的系統發散。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
