基于Zynq-7000的雙目視覺澆筑識別定位系統設計
2018-11-14 10:44:00安徽理工大學費雅倩
電子世界 2018年20期
關鍵詞:系統
安徽理工大學 費雅倩
為了解決重載機器人在澆筑過程中對砂箱澆口的準確辨識與定位,設計了一種基于Zynq-7000可擴展平臺的雙目視覺澆筑識別定位系統。該系統采用了兩個OV7620攝像頭對不同位置的砂箱進行圖像采集,在Zynq-7000的FPGA部分搭建了圖像采集系統和預處理系統,并在ARM部分搭建了對砂箱澆口識別定位系統,擬采用了WIFI無線通訊實現數據傳輸。最終實現在澆筑過程中對砂箱澆口的準確辨識和坐標定位。
引言:目前,隨著我國工業的發展,許多鑄造行業逐漸開始導入重力鑄造機器人系統,澆筑識別定位系統更是鑄造機器人系統的重要組成部分。然而很多基于DSP或單FPGA設計的系統很難實現對實時圖像采集和處理系統的高速處理。因此,本文提出的識別定位系統采用的是CMOS+FPGA+ARM的圖像采集處理和識別定位方案,來實現鑄造機器人在澆筑過程中對砂箱澆口的準確辨識和坐標定位。
1 系統的總體框架
基于Zynq-7000可擴展平臺的雙目視覺澆筑識別定位系統如圖1所示,系統主要包括OV7620攝像頭、Zynq-7000可擴展處理平臺、數據隨機存取存儲器DDR4和USB WIFI模塊等;其中FPGA完成圖像采集系統和預處理系統中的運算與控制,利用其并行處理的優勢大大的提高了雙核Cortex-A9處理器的運算速度。并在Zynq-7000的PS中搭建了嵌入式實時操作系統,通過USB WIFI與上機位交互進行無線調試。本文所設計的系統是通過兩個OV7620攝像頭從兩個不同的位置獲取砂箱的兩幅圖像,利用Zynq-7000芯片的PL部分對獲得的圖像進行圖像采集和預處理,然后將得到的預處理后的圖像數據進行圖像識別與定位,最后對接收到的圖像數據信息加以處理,控制執行器執行相應的動作,完成機器人系統的既定目標。
2 系統的硬件模塊設計
2.1 控制模塊
控制模塊通過芯片內部的AXI4-Stream總線接收PS上運行的軟件的控制采集模塊的啟動或控制預處理模塊的工作命令,然后將這些命令發送到圖像采集模塊或預處理模塊,控制這些模塊進行相應的操作。啟動采集命令使得采集模塊跳出了空閑狀態,進入了圖像采集狀態。控制預處理模塊工作命令使得預處理模塊開始工作,對采集的圖像進行中值濾波、邊緣提取、圖像分割。
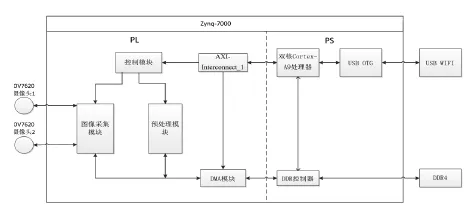
圖1 系統結構框圖
2.2 圖像采集系統
OV7620圖像數據采集板對OV7620攝像頭拍攝的圖像進行圖像采集與緩存;兩個SRAM構成的高速緩存將FPGA圖像數據接收緩存板接收到的圖像數據暫存起來;FPGA圖像數據接收緩存板與系統外部接口連接,完成模塊的外部接口。
2.3 預處理系統
AXI4_Stream2總線將接收到的圖像采集數據傳輸到雙口RAM中的一端;選擇控制模塊控制雙口RAM將其中的幀數據提供給中值濾波模塊,同時控制雙口RAM的另一端存入另一幀圖像數據;中值濾波模塊將接收到的幀數據進行中值濾波,平滑圖像消除噪聲;邊緣提取模塊將消除噪聲后的圖像數據進行邊緣提取,銳化圖像增強邊緣;二值化模塊將銳化后圖像的進行分割,分割出前景和背景;最后將分割后的圖像數據存入BRAM中。
3 系統的軟件設計
雙目立體視覺系統雙目視覺澆筑識別定位系統的軟件模塊主要功能:(1)對DMA模塊初始化;(2)發送控制命令到圖像采集模塊和預處理模塊,控制相應模塊執行相應操作;(3)對預處理完的圖像進行三維重建和立體匹配;(4)實現砂箱澆口的準確判別與三維坐標定位。
4 實驗結果分析
該系統基于Zynq-7000平臺的運行測試并對砂箱澆口進行識別定位,砂箱圖像通過PL進行圖像采集、預處理并存入DDR應用軟件通過PS部分實時操作系統進行識別定位。該試驗分別使用了ARM+FPGA處理和純ARM處理,從執行效率對比中可以看出,軟硬件協同處理一幀圖像只需要3462μs,與純ARM實現識別速度相比效率提高了15.2倍。
5 結論
本文設計實現了一種基于Zynq-7000可擴展平臺的雙目視覺澆筑識別定位系統。該系統應用Zynq-7000可擴展平臺,實現了軟件與硬件的協同工作,相比于傳統的基于CPU、GPU和DSP的處理平臺,提高了系統功能的靈活性,也降低了系統功耗;同時構建了可視化的實時嵌入式圖像處理系統,可以實現不同的圖像處理算法,提高了圖像處理的實時性和準確性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
