牽引變電所多時鐘源對時策略研究
2018-11-06 08:17:56范三龍李永征
電氣化鐵道 2018年5期
關鍵詞:管理
范三龍,李永征
?
牽引變電所多時鐘源對時策略研究
范三龍,李永征
為了構建可靠的牽引變電所時鐘同步系統,在分析牽引變電所典型時鐘同步網絡構成的基礎上,介紹了牽引變電所的主要時鐘源屬性,提出了通信管理機和保護測控裝置各自基于優先級的對時策略,利用誤差傳遞公式計算了各級時鐘失效后的守時時間,為牽引變電所二次設備時鐘系統設計提供參考。
變電所自動化系統;時鐘同步;誤差傳遞公式
0 引言
時鐘同步對于電力系統的故障分析、監視控制及運行管理具有重要意義,統一的時間基準是進行分析、故障處理和運行管理的基礎[1]。我國高速鐵路牽引網采用全并聯AT供電方式,其分段保護和故障測距需同步采集牽引網沿線的信息,因此整條供電臂的時鐘需要保持一定的同步精度[2],牽引變電所的時鐘同步尤顯重要。
牽引變電所自動化系統有多個時鐘源(單一時鐘源無法構建可靠的時鐘同步系統),時鐘源的運行又存在不確定性。對時方案需根據不同時鐘源的運行情況進行選擇,同時還應具有足夠的靈活性,以便在某些時鐘源失效后,對時系統仍然可以可靠運行。只有不同時鐘源對時方式互相協調,才能構建精確、可靠的時鐘同步系統,本文將對牽引變電所多時鐘源的對時策略進行研究。
1 牽引變電所時鐘同步網絡
牽引變電所時鐘同步網絡主要由調度中心、衛星時鐘裝置(模塊)、遠動服務器(通信管理機)、保護測控裝置、所內監控計算機(當地監控系統)等構成。為保持全線變電所時鐘的統一,通常采用通信報文對時與脈沖校正、IRIG-B碼(簡稱B碼)專網授時、SNTP、IEC61588等時鐘同步協議[3]。圖1和圖2所示為2種典型變電所自動化系統的時鐘網絡結構,圖中標出了授時信號至變電所二次設備的連接方式。
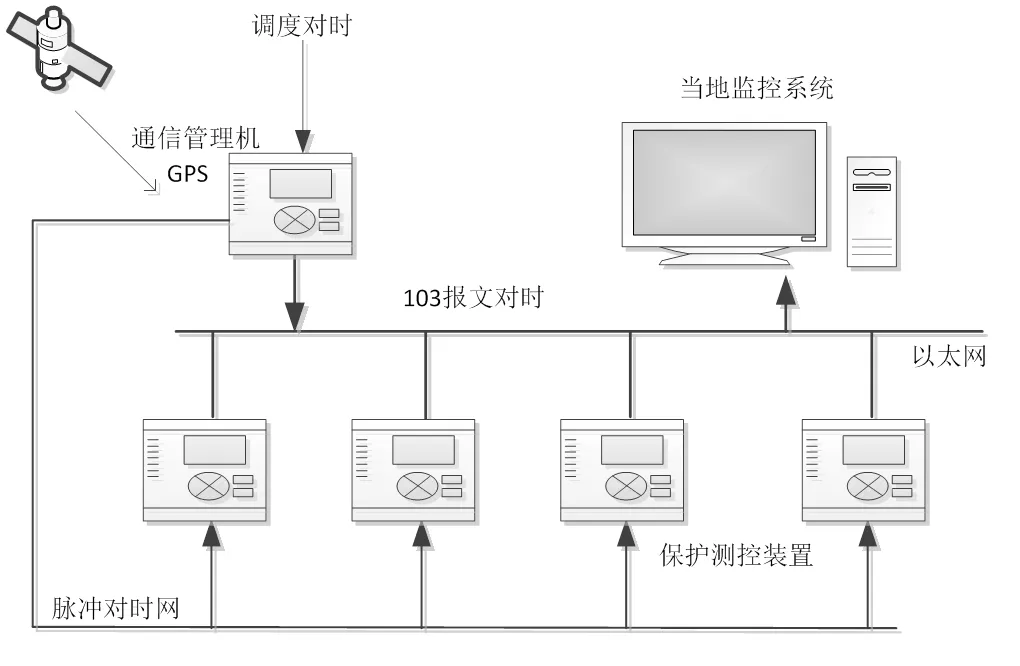
圖1 通信報文配合脈沖對時網絡結構
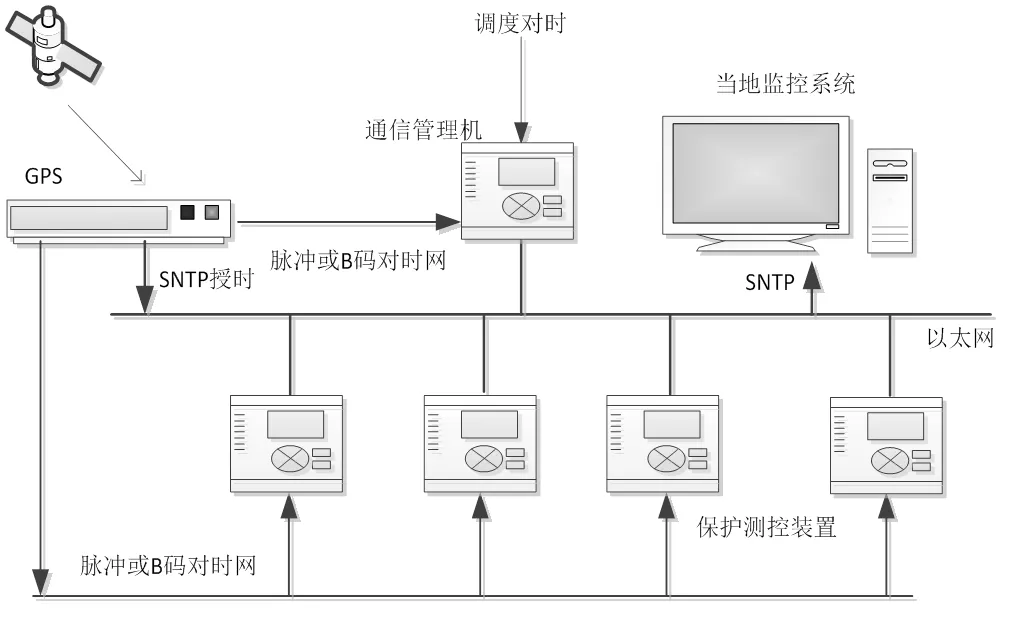
圖2 獨立衛星時鐘裝置對時網絡結構
圖1中,變電所自動化系統采用秒脈沖配合通信報文對時方式。通信管理機是系統的時鐘中心,其內置衛星時鐘模塊,在衛星時鐘工作正常時,從衛星時鐘模塊獲得精確時鐘,同時獲取秒脈沖;當衛星時鐘失效時,從調度中心獲得時鐘,并自行產生秒脈沖。通信管理機通過秒脈沖和網絡通信報文為保護、測控裝置對時,通過網絡通信報文為所內監控計算機對時。早期常規變電所一般采用該對時方案。
圖2中,變電所自動化系統采用獨立衛星時鐘裝置對時。獨立衛星時鐘裝置是系統的時鐘中心,其作為所內主時鐘,利用IRIG-B碼485差分信號為保護、測控裝置對時,配置SNTP接口為所內監控計算機對時。如果衛星時鐘裝置故障,則由通信管理機接受調度中心對時,并作為主時鐘為站內設備對時。數字化變電所一般采用該對時方案。
2 變電所的時鐘源分析
2.1 調度主站對時
鐵路牽引供電遠動系統主要由調度中心及變電所、分區所、開閉所等調度站構成,電力調度中心通過專用的電力遠動通道對變電所、分區所等實施監控。變電所通常均接入各級調度系統,調度中心主站和變電所通信管理機之間通過通信報文對時,然后由管理機為所內設備對時。調度主站通常情況下均配置衛星時鐘,具有很高的時鐘精度。但鐵路電力遠動的通道有多種類型[4],通過通信報文對時,由于通信延時不太確定,對通信和報文處理延時的修正不盡完美,導致調度對時的誤差一般為幾十毫秒甚至上百毫秒。
對于支持SNTP協議的通信管理機,也可以使用SNTP對時。由于SNTP對網絡延時做了較好的修正,在廣域的調度通信網內對時精度可達50 ms以內,高于通信報文對時精度。
調度主站可能不止一個,不同主站和管理機之間有如下3種對時方式:
(1)系統時鐘:即該主站的對時改寫系統時鐘,同時影響整個變電所的時鐘基準。
(2)獨立時鐘:當收到調度主站的通信對時報文后,不改寫管理機的內部時鐘,而是記錄該主站時鐘與通信管理機時鐘的差。將事件信息發送給該主站時,需要使用該時鐘差修正報文中的時標,以保持與該主站的時鐘一致。目前已很少采用該對時方式。
(3)不對時:即忽略該主站的通信對時功能。
對于鐵路變電所,鐵路電力調度為主調度,地方電力公司調度中心通常只進行信號監視,并不操作。在對時的配置上,需配置鐵路電調對時系統,其他調度主站不對時。
2.2 衛星時鐘對時
衛星全球定位系統是一種以人造地球衛星為載體的全球覆蓋、全天候工作的無線電導航定位系統,可以實現精確導航、定位及授時。目前世界上主要有美國的GPS、俄羅斯的GLONASS、歐洲空間局的伽利略計劃、中國的北斗導航衛星系統。美國的GPS在系統可靠性、用戶設備產業化等方面具有一定優勢,中國的北斗則在迅速崛起。北斗導航定位系統可以全天候對我國領土、領海及周邊地區進行定位及授時[5],在國內電力系統中得到廣泛應用。
衛星時鐘由內置于通信管理機中的接收模塊或獨立的衛星時鐘裝置,以及外置接收天線組成,通常配置GPS接收模塊和北斗接收模塊組成冗余系統,接收多顆衛星的信號獲取時鐘,精度可以達到優于500 ns的級別,若采用更高級別的模塊,精度還可以大幅提高。
衛星時鐘信號受天線的狀態及天氣影響嚴重。天線一般安裝于室外,且在其上方不能有遮擋,常年的室外風吹雨淋,容易出現故障導致跟蹤不到衛星。當跟蹤到的衛星數量較少或完全跟蹤不到衛星時,衛星時鐘模塊的時鐘精度就會降低,甚至只能依靠內部的實時時鐘芯片提供時間。
納秒級高精度的衛星時鐘只存在于模塊內部,還需要通過對時網絡給保護測控裝置對時。衛星時鐘的常見輸出信號有脈沖信號、串行口時間報文、IRIG-B碼、網絡時間報文(NTP/SNTP)等。脈沖信號和B碼屬于硬對時(需專用對時網)。脈沖信號只能將各個裝置時鐘的毫秒值對齊,時分秒等必須通過軟件方式由衛星時鐘(或管理機)發送給各個裝置。3種常用的時間協議如圖3所示。
衛星時鐘的脈沖信號在到達裝置的回路過程中會經過光電轉換、媒介、器件延時等,裝置在接收到對時脈沖后,還需經過CPU中斷的響應時間(一般在微秒級),裝置最終可獲得的時鐘精度約為50ms。所以,通常無需采用更高精度等級的衛星時鐘接收模塊。
衛星時鐘的運行信息可以通過監視衛星時鐘對應的串口報文或通過硬結點開入信息獲得。衛星時鐘模塊定期輸出天線、衛星狀態等信息,可據此判斷衛星時鐘時間的有效性。
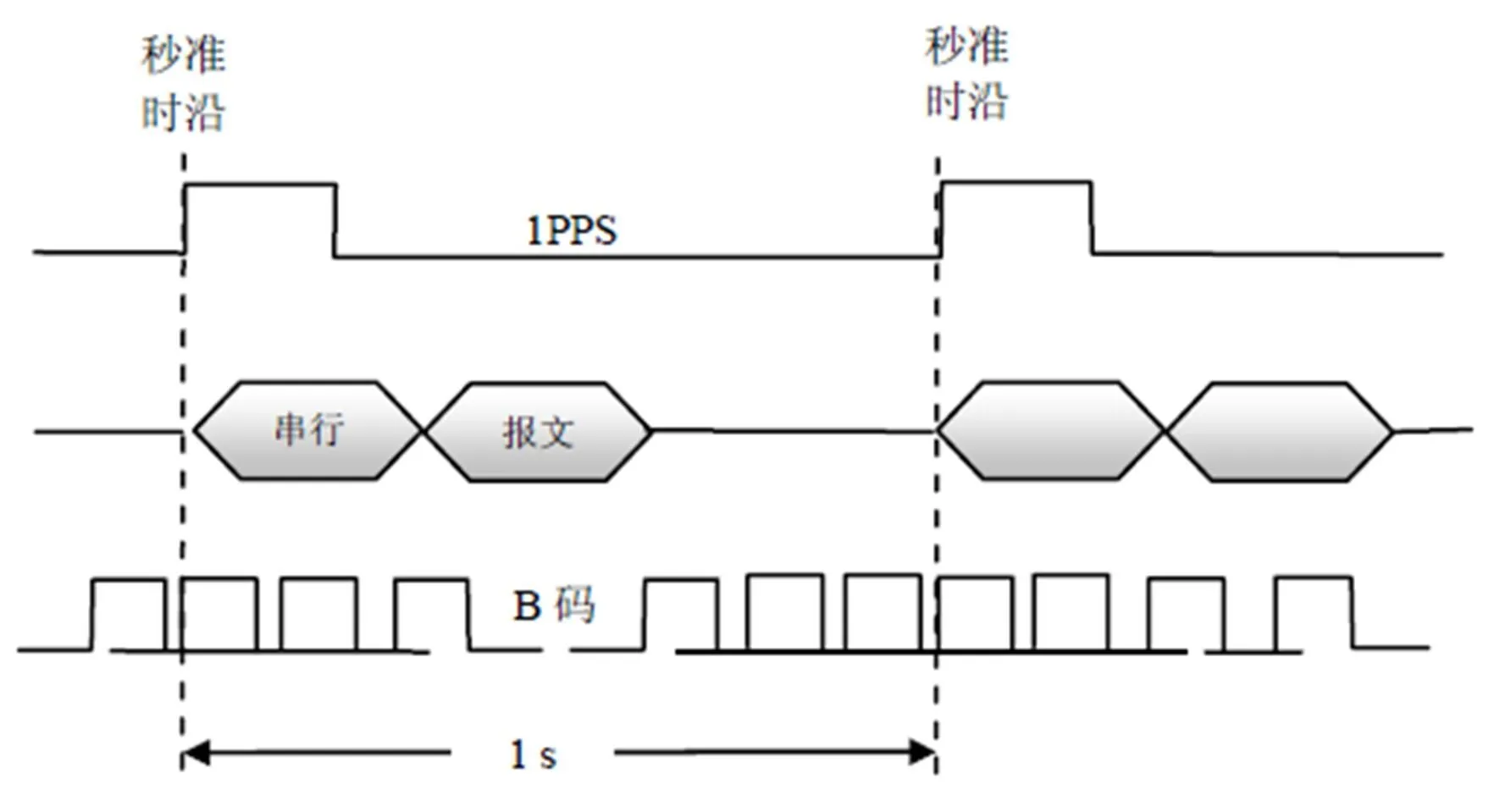
圖3 3種時間協議示意圖
衛星時鐘可以作為精密時間協議(Precision Time Protocol,PTP)的主時鐘。精密時間協議是IEC61588定義的高精度網絡時鐘同步協議,其目的是為了實現網絡分布式測量和控制系統各組成部分之間的高精度同步,其精度可達亞微秒級[3]。由于IEC61588需要衛星時鐘、交換機、裝置以太網端口的支持,目前成本較高,且穩定性存在問題,尚未普及。
2.3 當地監控計算機對時
當地監控計算機的時間來源于SNTP時間服務器或管理機通信對時,也可以手動校準計算機的時間。變電所內通常沒有Internet連接,不能從網絡上獲得時間。
當地監控計算機不主動為裝置對時,其對時功能可作為所內時鐘失效時的臨時對時方案,或作為一種時鐘的調試手段。在調度對時、衛星時鐘對時均不可用時,可采用當地監控計算機對時。通過保護綜合管理的對時功能給通信管理機、保護測控裝置等手動對時,或通過站內通信規約報文對時。當計算機的時間由人工設定時,精度只能在秒級。
3 通信管理機基于優先級的對時策略
通信管理機是常規變電所的對時中心,在調度對時和衛星時鐘對時方式下,時鐘首先由通信管理機接收,然后再轉發給所內設備。在長期運行中,衛星時鐘會因為天線或模塊原因出現故障,調度的通信也會因為各種原因中斷,此時時鐘源會發生變化,管理機必須具有足夠的靈活性應對不同的運行模式。管理機對不同的時鐘源采取了優先級策略,以協調各時鐘源的對時功能。各時鐘源優先級如表1所示。
通信管理機的初始優先級是0,即未對時,當接收到后臺計算機的對時后,優先級變為3,當接收到更高級別的時鐘源(衛星時鐘、調度主站等)對時后,將優先級設為該更高級別時鐘源的優先級。只有當對時的時鐘源優先級大于或等于通信管理機當前的時鐘優先級時,通信管理機才會接受該次對時,避免低精度時鐘源的對時降低通信管理機時鐘精度。當通信管理機的時鐘有效后,才向外發送對時,避免在本身時鐘無效情況下為裝置對時。
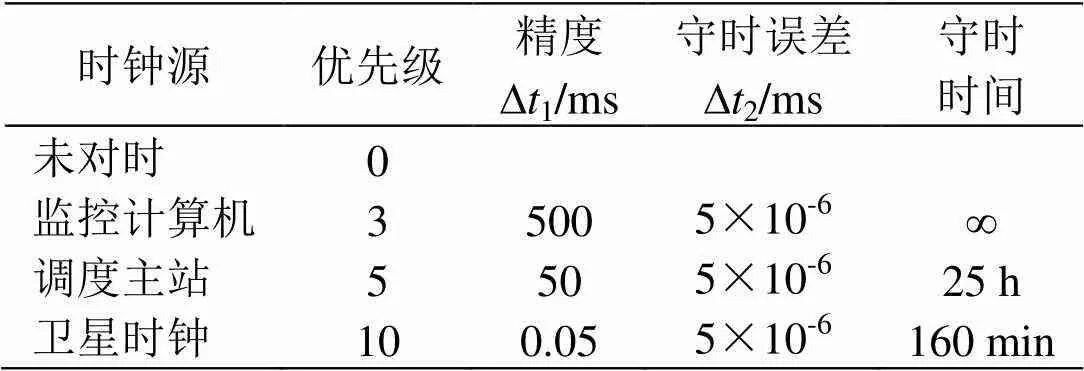
表1 通信管理機的時鐘源優先級
通信管理機接受某個高優先級時鐘源的對時后,將當前優先級設為該時鐘源的優先級。當高優先級時鐘源失效后(長期收不到有效的對時,或者衛星斷線等),通信管理機依靠自身的時鐘守時。經過一定的守時時間,當誤差積累達到低一級時鐘源的誤差后,自動降低優先級到下一個精度級別。
守時時間精度主要由裝置采用的時鐘晶振精度決定。普通晶振精度為5×10-6(5ppm)ms,對應每天誤差432 ms。守時時間根據守時誤差在不同優先級間的誤差傳遞公式計算。
設=(1,2, ...,x),則絕對誤差傳遞公式為
D= (?/ ?1)D1+ (?/ ?2)D2+ ... + (?/ ?x)Dx(1)
如果高優先級時鐘失效時的時刻為1,其誤差為D1;守時的單位時間誤差為D2= 5×10-6;經過時間后,守時后的時刻=1+,則
D= (?/ ?1)D1+ (?/ ?2)D2= 1×D1+D2(2)
據此可計算出表1中的守時時間。
4 保護測控裝置基于優先級的對時策略
變電所內一般會同時存在多個時鐘源,需要采取措施解決多個時鐘源為所內設備(保護測控裝置)對時,或者設備之間交叉對時的情況。在保護測控裝置中采用多時鐘源優先級策略,同樣是解決上述問題的有效方法。
變電所內具備對時功能的設備包括:主/備通信管理機、通信服務器、所內監控計算機等,且通信管理機、通信服務器存在多臺配置的情況,同一主站還存在UDP、TCP等不同的通信對時方式。典型時鐘優先級及各級守時時間如表2所示。
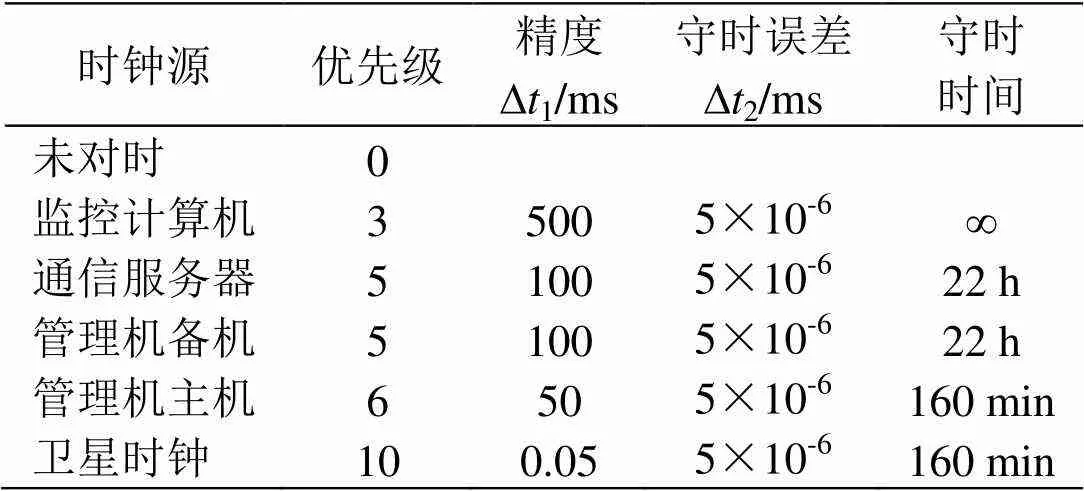
表2 保護測控裝置的時鐘源優先級
5 應用效果
多時鐘源優先級對時策略已應用于國電南自的NDT650/660牽引變電所綜合自動化系統,不同時期的工程分別采用了圖1和圖2所示的對時方案。優先級策略內置于通信管理機和保護測控裝置中,同時,通過修改通信管理機和規約配置,或監控計算機的配置文件,可以改變時鐘源的優先級,或其他對時行為。優先級對時策略對多個時鐘源的對時行為實現了有效協調,保證所內設備獲得正確的時鐘,并避免了不同設備間交叉對時的情況,從而在整個供電臂獲得一致的時鐘。
6 結語
調度中心或衛星時鐘為通信管理機對時,衛星時鐘或通信管理機再為所內的其他設備對時,是當前牽引變電所綜合自動化系統的典型對時模式。通信報文對時與脈沖校正、IRIG-B碼專網授時是目前的主要時鐘同步手段。通過通信管理機和保護測控裝置中的時鐘源優先級策略,可以協調牽引變電所多個時鐘源的對時行為,構建更可靠的時鐘同步系統。
[1] 張信權,梁德勝,趙希才. 時鐘同步技術及其在變電所中的應用[J]. 繼電器,2008,36(9):69-72.
[2] 董雪源,高仕斌. 精密時間協議實現牽引網故障測距時鐘同步[J]. 電氣化鐵道,2006(5):13-16.
[3] 陳宏,喻子易. 變電所GPS授時方式與二次設備時間同步[J]. 湖北電力,2009,33(1):21-23.
[4] 范三龍,張林. 鐵路牽引供電E1環形遠動通道[J]. 電力自動化設備,2012,32(4):142-144.
[5] 陳孟元,陳躍東. 基于高精度晶振同步北斗1pps的同步相量測量裝置時鐘源[J]. 電力自動化設備,2011,31(9):111-114.
In order to establish reliable clock synchronization system for traction substation, and on the basis of analyzing the composition of typical clock synchronization network for traction substation, the paper introduces the property of master clock source of traction substation, puts forward the self-priority based time synchronization strategy for communication management unit and protection and monitoring device, and the calculation of punctual time by error propagation formula after failures of clocks of various levels, these will provide references for design of clock systems for secondary equipment in traction substation.
Automation system of substation; clock synchronization; error propagation formula
10.19587/j.cnki.1007-936x.2018.05.020
U224.9
B
1007-936X(2018)05-0077-04
2018-03-16
范三龍,李永征.國電南京自動化股份有限公司,高級工程師。
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
水資源開發與管理(2021年12期)2022-01-15 08:54:58
——關注自然資源管理
遼寧自然資源(2021年3期)2021-05-19 06:39:04
水利建設與管理(2020年9期)2020-10-21 05:22:26
河南水利年鑒(2020年0期)2020-06-09 05:43:30
中國制筆(2019年1期)2019-08-28 10:07:26
建材發展導向(2019年10期)2019-08-24 06:26:30
建材發展導向(2019年10期)2019-08-24 06:26:20
中國眼鏡科技雜志(2017年13期)2017-08-16 03:13:42
雜文月刊(2016年1期)2016-02-11 10:35:51
