雷達高度表回波模擬及擴展目標算法
2018-11-06 09:46:22,,
雷達科學與技術 2018年5期
, ,
(中國工程物理研究院電子工程研究所, 四川綿陽 621999)
0 引言
由于雷達高度表考慮的是大地目標的散射特性以及載體的高速運動特性,目標回波可以看作由分布于不同距離、不同方位分辨單元上的若干散射中心回波的矢量合成。這將導致雷達目標回波在時域和多普勒域的包絡展寬。如果雷達高度表仍采用經典的“匹配濾波+門限判決”點目標檢測方法,目標能量將不能充分利用,降低了目標的檢測概率。如此特點決定了雷達高度表的目標檢測算法與傳統檢測算法會有所不同。
現已有多種檢測器已被用于雷達高度表擴展目標檢測。文獻[1]指出,由于目標的散射點個數、位置、幅度、相位、多普勒等信息都是未知或部分未知的,最優檢測器不可實現。通常做法是根據似然函數估計未知參量,將未知參量的極大似然估計代入似然比檢驗,從而得到可以實現的廣義似然比檢測器,例如積分檢測器。文獻[2]對雷達高度表回波在時域及多普勒域展寬的問題進行了系統的研究,將粗糙大地簡化為Brown定律和垂直入射時有鏡面反射的其他粗糙表面散射模型的結合,通過對m序列脈間相位編碼波形分析研究,提出并設計實現了基于“時域相關+多普勒域濾波”算法的目標檢測處理系統。該算法通過設置合適的本地信號延時量,按距離單元對回波信號進行相關,在時間域實現了對天底點目標的相干積累,然后通過對多普勒域分布的能量進行非相干積累來檢測大地面目標。本質上,這種算法是在目標信息完全缺失情況下由廣義似然比檢測推導而來,是積分檢測器在脈間相位編碼雷達高度表上的具體實現形式。此外,文獻[3]針對雷達高度表天線寬波束帶來的大地面目標回波信號頻域多普勒展寬問題,提出一種基于天底點多普勒頻率FFT濾波選大處理獲得雷達高度表對其載體的速度測量方法。文獻[4]針對安裝在高速運動載體上的脈間編碼雷達高度表存在的多普勒失配問題,提出一種多普勒帶通濾波器和本地碼延時提取速度及距離信息的檢測方法。此外,文獻[5-6]討論了高速運動帶來的“多普勒敏感性”問題,當回波信號的多普勒頻移超過濾波器的多普勒容限帶寬時,系統檢測性能下降。
針對上述問題,本文從RADARSAT-1數據生成的SAR圖像中提取強散射中心,結合雷達發射波形、天線方向圖、雷達高度表與大地之間位置、速度的三維時空關系,仿真模擬了具有高可信度的雷達高度表目標回波信號。在此基礎上,通過分析目標回波的時頻特性,設計了基于散射中心時頻域分布的擴展目標檢測器,提高了目標的檢測概率,解決了載體高速運動條件下“多普勒敏感性”問題。
1 脈間相位編碼雷達高度表回波模擬
雷達高度表目標回波是由大地表面對電磁波的后向散射與反射而形成的,大地表面作為雷達高度表的目標,比一般雷達點目標要復雜得多。其中既蘊含了大地目標的散射特征信息,又蘊含了目標的運動特征信息。為了獲得高可信度的雷達目標回波需要確保兩方面的保真性:一是對目標電磁散射特性的保真性,二是對運動特征的保真性。
1.1 高保真目標電磁散射特性模擬
目標回波與雷達高度表發射波所照射的大地面目標的散射特性有關,此外還與發射波的入射角、極化方式和工作頻率等因素有關。而且,隨著頻率和姿態角的不同,目標的散射場變化十分劇烈。該現象可由高頻近似理論進行解釋。在高頻區,當一個電大尺寸目標被照射時,它的總散射場可以看作是若干個散射點或散射源發出的散射信號經矢量合成的結果[7]。隨頻率和角度的不同,單個散射點的散射信號的變化通常并不劇烈,但各散射點的相位會發生變化,從而導致總的散射場劇烈變化。從信號處理的角度看,雷達目標由一系列幅度和相位確定的散射中心組成,可以將目標看成一個線性系統,照射目標可等效為發射波通過目標系統,輸出應為發射波與目標系統響應函數的卷積,因此可以使用目標沖擊響應函數來進行建模[7]。根據這一機理,本文根據目標強散射點的分布對不同波形、不同姿態角下的雷達目標回波信號進行了模擬。其中,目標強散射點的數據來源可以是理論計算,如矩量法、SBR法、FDTD法等,也可以是實驗測量數據。本文采用加拿大RADARSAT-1的成像結果作為大地目標強散射點的數據來源,該成像結果采自RADARSAT-1精細模式2,斜視角約為1.6°,入射角為37°~48°,成像帶寬為30.3 MHz,標稱分辨率為10 m,成像結果如圖1所示。
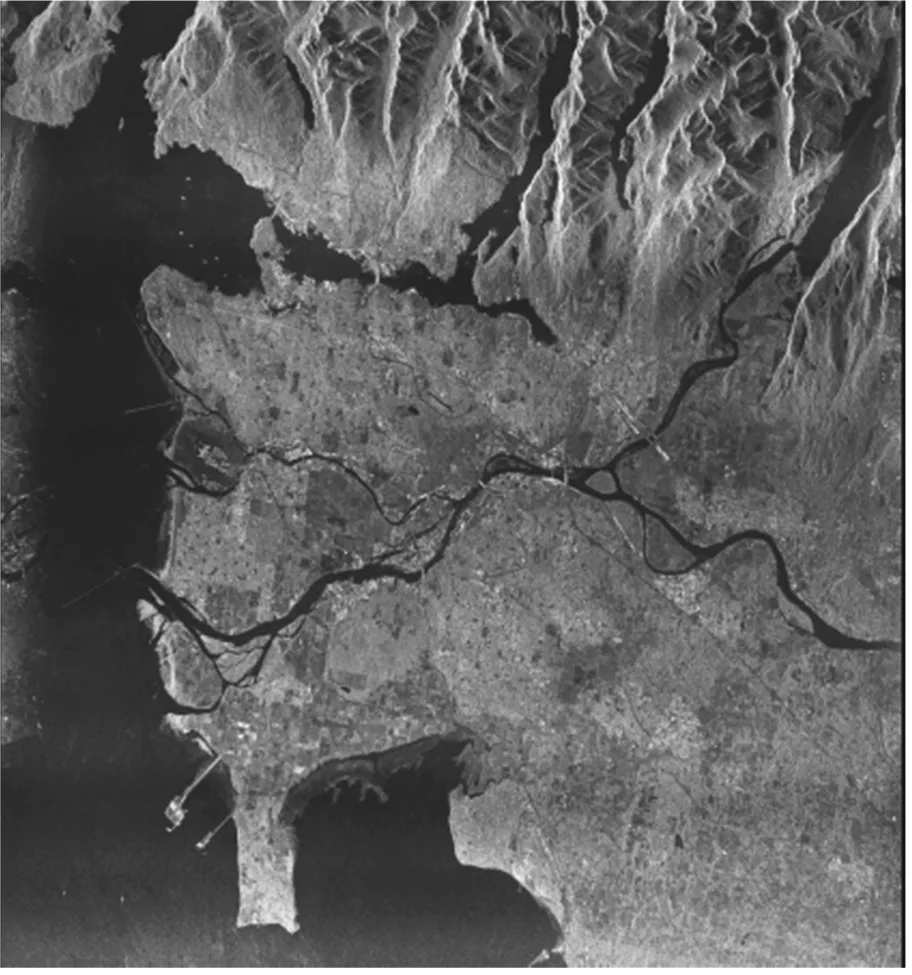
圖1 加拿大溫哥華的RADARSAT-1精細模式2成像結果
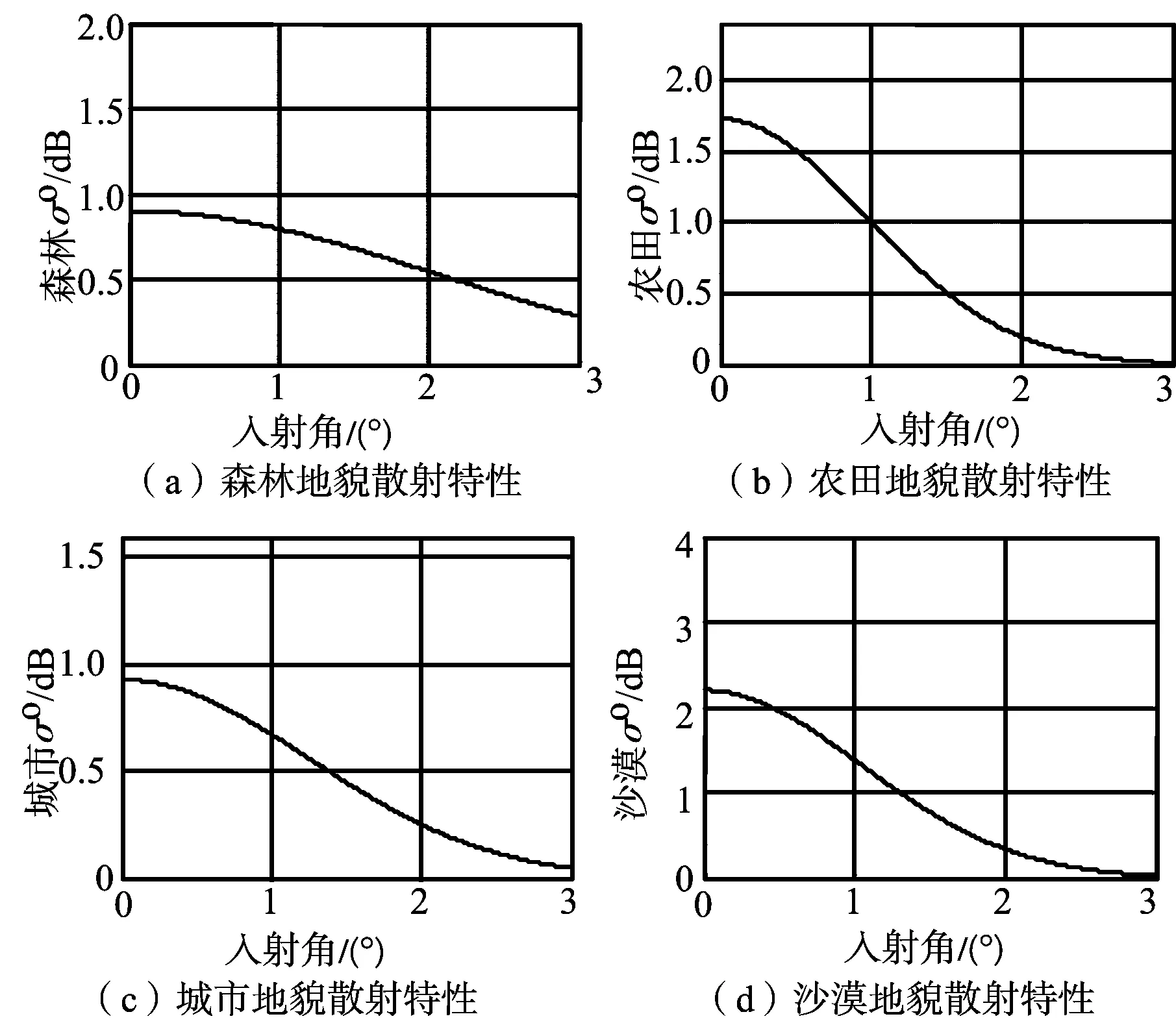
圖2 4種典型地面的散射系數
1.2 高保真運動特性模擬
圖3給出了雷達高度表與大地目標的幾何關系示意圖[1]。圖中雷達處于Z軸上,距地面的高度為h,速度矢量v位于XZ平面內,θ為天線的半波束角,γ為速度矢量與Z軸的夾角。

圖3 雷達高度表與大地目標的幾何關系

圖4 雷達高度表照射區隨時間變化圖

圖5 雷達高度表照射區隨時間、頻率變化圖
1.3 雷達高度表目標回波模型
根據1.1節介紹的目標強散射點模型,設散射點為理想的幾何點,發射信號x(t)=s(t)ej2πft的回波信號xr(t)可寫成
xr(t)=∑k∑N-1i=0GkAkrectt-nTr-τkTr·
1-rectt-nTrTr·
s(t-τk)ej2π(fc-fdk)t=
∑k∑N-1i=0GkAkrect2(t,nTr,τk)·
s(t-τk)ej2π(fc-fdk)t
(1)
式中:rect(t/Tr)為寬度等于Tp的矩形函數,Tp,Tr分別為脈沖寬度及脈沖重復周期,考慮雷達高度表采用單天線收發分時工作,[1-rect()]為收發開關,為書寫簡便,記rect()與[1-rect()]的乘積為rect2();Gk為第k個散射點處的天線增益;Ak,τk,fdk,(xk,yk)分別為第k個散射點回波的幅度、高度延時、多普勒頻率和位置坐標。仿真中,Ak的取值可以從合成孔徑成像雷達(SAR)的圖像中提取,τk,fdk的取值由雷達高度表與大地面目標的幾何關系確定,其關系如式(2)所示:
2 目標回波特性
2.1 時域特性分析
由于發射波形為脈沖形式,目標上的散射點不是同時被照射,而是天底點首先被照射,然后隨著時間的推移而照射偏離天底點的散射點。回波信號xr(t)在時域的理論分布如圖6所示。仿真獲得的回波信號xr(t)的時域分布如圖7所示。圖中,虛線為單次回波的仿真結果,實線為1 000次回波平均后的結果。單次回波表現為在時域的起伏,其起伏范圍大都在12~16 dB之間,這是由于地物目標的回波起伏特性造成的。該結論與理論分析[9]、同行的仿真結果[10]是一致的。從圖6、圖7中還可以看出,回波信號包含相干反射和非相干散射兩種分量,反射分量存在于回波脈沖的上升沿內,而散射分量主要存在于回波脈沖的后沿。上述結論對設計目標檢測器具有指導意義。
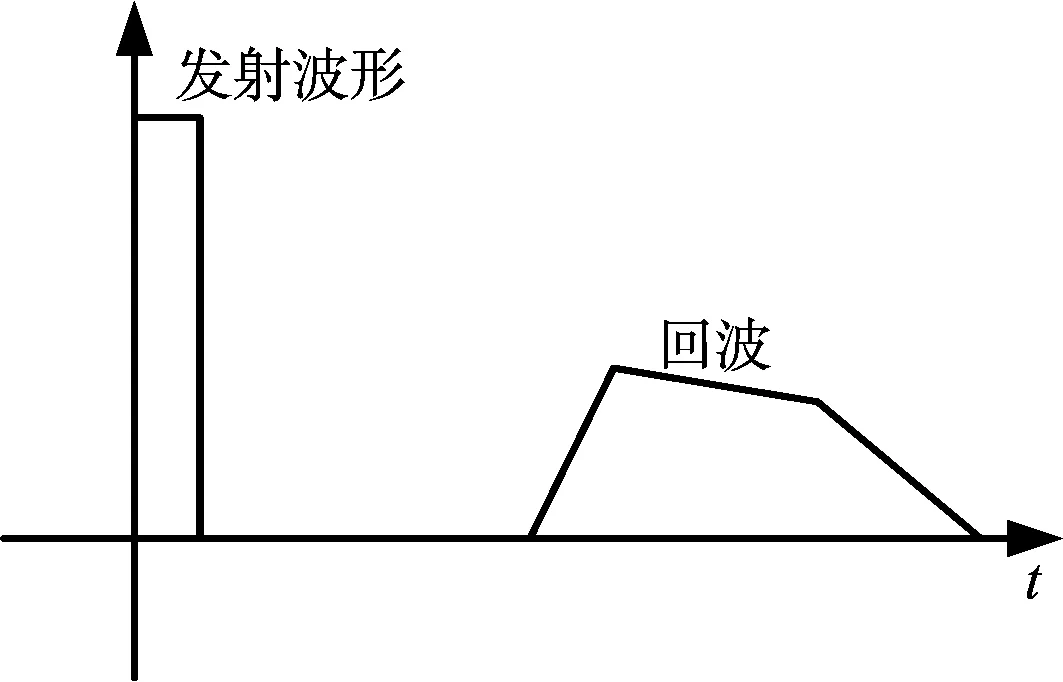
圖6 雷達高度表發射脈沖與回波信號時域關系圖
圖7 回波信號在時域的分布
2.2 目標回波頻域特性分析
根據1.2節的理論分析可知,回波信號xr(t)的頻譜分布是由照射圓面積內各個散射點的多普勒分量矢量疊加而成。在h=3 000 m森林地貌情況下,回波信號的頻譜分布如圖8所示。圖中,虛線為單次回波的仿真結果,實線為1 000次回波平均后的結果。在不同地貌、不同高度下,回波信號xr(t)的頻域展寬各不相同,仿真結果如圖9所示。從仿真結果可以得到以下有助于開展目標檢測器設計的結論:
1) 由于地物目標的回波起伏特性,單次回波的多普勒包絡是起伏的;
2) 回波信號除天底點附近的反射分量以外,還存在一個比反射分量要小的散射分量(森林除外);
3) 天底點附近的多普勒反射分量的帶寬分布相對整個最大照射圓的多普勒帶寬較小,而能量分布相對較多;
4) 隨著高度的降低,回波信號的頻譜寬度展寬。
圖8 回波信號在頻域的分布
(a) 同一高度不同地貌回波信號頻譜分布
(b) 森林地貌不同高度回波信號頻譜分布圖9 不同地貌不同高度的回波信號頻譜分布
3 基于擴展目標的目標檢測算法
由第2節的分析可知,雷達高度表目標回波在時域和多普勒域的包絡是展寬的,且功率起伏幅度在12~16 dB之間,這給傳統目標檢測帶來了困難。不過當進行擴展目標檢測時,目標回波的時頻域特性就變為必要的信息。問題的關鍵是怎樣把目標回波的時頻域分布概率密度等先驗信息與擴展目標檢測算法相結合,設計出新的雷達高度表目標檢測算法。文獻[11]給出了等效散射中心假設下目標回波的近似表達式:

δ(t-Ti-T0)+w(t)
(3)
式中,θ為目標姿態角,K為散射中心個數,ai(θ)為第i個散射中心的幅度,φi(θ)為第i個散射中心的相位,T0為目標質心到雷達高度表的距離產生的時間延遲,Ti為第i個散射中心到目標質心在雷達視線上的距離產生的時間延遲,w(t)為接收機的復平穩高斯白噪聲。目標檢測的任務是根據輸入信號判斷目標是否存在,通常可以表示為一個二元假設檢驗問題:
H0:x[n]=w[n]
在理想條件下,假設目標的所有信息都是已知的,根據Neyman-Pearson準則,最優檢測器為似然比檢驗。一種方法是,首先發射一個高分辨率波形對環境進行搜索,并用去卷積算法處理回波信號以提取環境的響應,然后用這一響應來形成發射波形和匹配接收機以檢測目標[12],當然這種最佳匹配接收很難實現。在實際中,現有多種檢測器已被用于高分辨雷達擴展目標檢測,如積分檢測器、序貫檢測器(OS-RSTD)[13]、基于散射中心密度的雙門限檢測器(BSD-M/N)[14]、SDD-GLRT檢測器[15]、基于散射點個數估計的雙門限檢測器(BS-GLRT)[11]。其中,BS-GLRT檢測器考慮散射點個數的概率分布,通過改進積分檢測器中目標散射點個數的估計方法,提高了檢測器性能。本文考慮目標回波時域和多普勒域的功率概率密度,并結合BS-GLRT檢測,提出了一種適用于雷達高度表的目標檢測方法。該方法通過改進積分檢測器中目標散射點個數的估計方法,達到盡可能接近排序積累檢測其性能的目標[1]。該檢測系統的信號處理流程如圖10所示。首先,對接收信號作多普勒補償、匹配濾波等相干處理。然后,選定第一門限λ1,將匹配濾波后的輸出信號取模求平方。最后,將超過λ1的距離單元的值求和累加,并與第二門限作λ2比較得出判決。其中,第一門限λ1可根據AIC準則來選取,如式(5)所示。第二門限的值可根據虛警率通過仿真來選取。
2Jlnπσ2
(5)
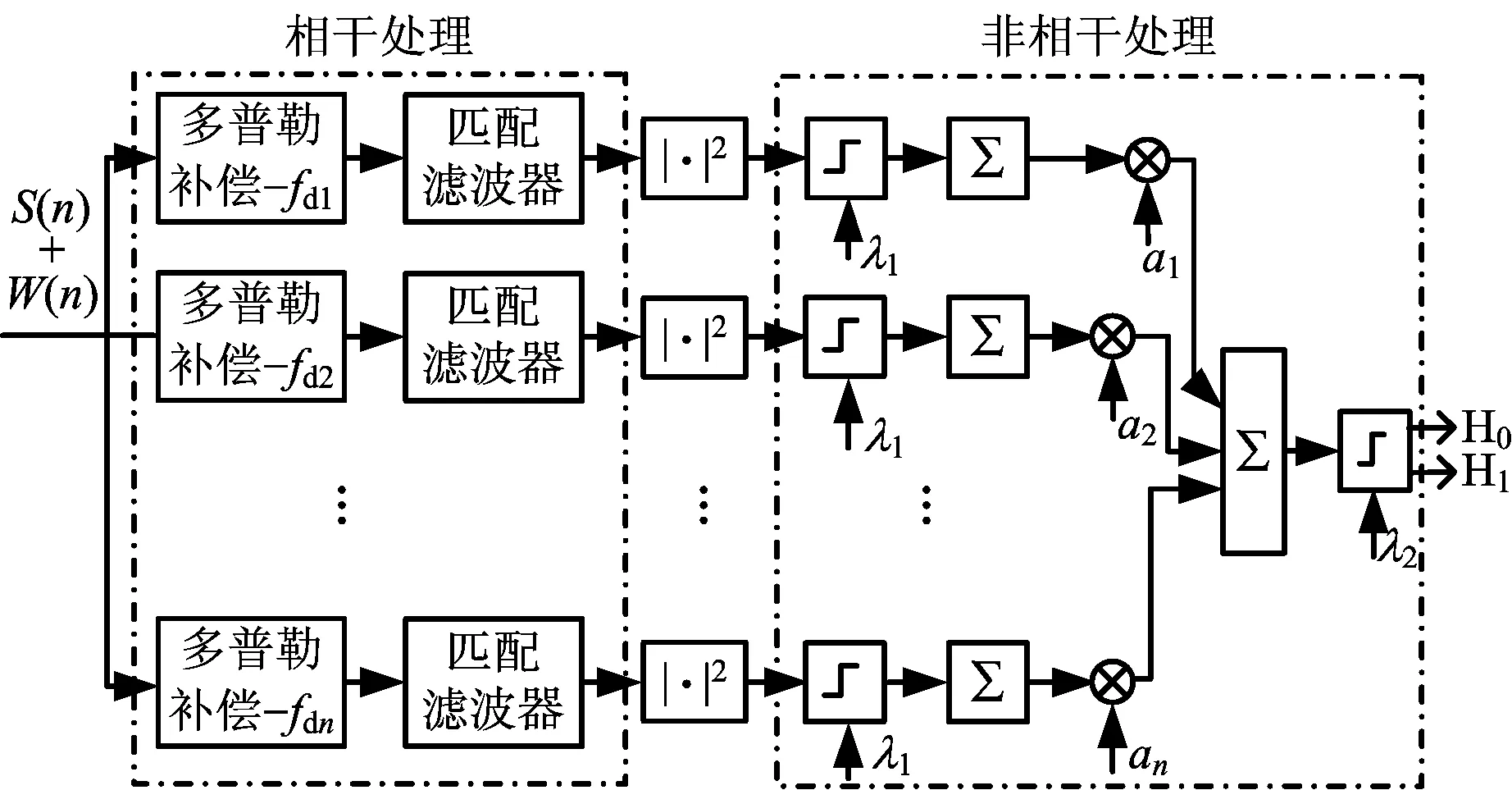
圖10 檢測器信號處理流程圖
4 仿真
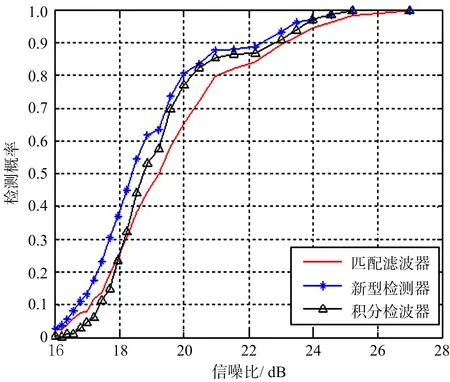
圖11 性能檢測曲線
5 結束語
本文將目標回波看作是若干個散射點散射信號的矢量合成,并考慮載體高速運動對各個散射點散射信號的多普勒調制,提高了雷達高度表目標回波仿真的可信度;在此基礎上,進行了不同地形地貌、不同高度的大地回波信號模擬。理論分析和仿真結果均表明,雷達高度表回波信號具有明顯的時域和多普勒域二維展寬和功率起伏特性。這些特性對傳統目標檢測器的設計帶來了困難,同時也給擴展目標檢測器帶來了不可多得的先驗信息。基于上述分析,設計了一種適用于雷達高度表的改進BS-GLRT檢測算法。仿真表明,該檢測算法的性能優于現有的檢測算法。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25