基于改進(jìn)RFT算法的寬帶LFMCW雷達(dá)運(yùn)動(dòng)補(bǔ)償方法
2018-11-06 09:46:14,,,
雷達(dá)科學(xué)與技術(shù) 2018年5期
關(guān)鍵詞:方法
, , ,
( 1.空軍預(yù)警學(xué)院, 湖北武漢 430019; 2.中國(guó)人民解放軍31433部隊(duì), 遼寧沈陽(yáng) 110000)
0 引言
線性調(diào)頻連續(xù)波(LFMCW)雷達(dá)具有體積小、重量輕、功耗低等優(yōu)勢(shì),因此被廣泛用于SAR/ISAR成像系統(tǒng),基于LFMCW雷達(dá)的成像方法已經(jīng)引起了學(xué)者們的廣泛關(guān)注[1-3]。直升機(jī)作為具備對(duì)地打擊和運(yùn)送能力的靈活飛行器,是一類典型的“低慢小”空中目標(biāo),因此基于LFMCW雷達(dá)實(shí)現(xiàn)直升機(jī)目標(biāo)的檢測(cè)與識(shí)別具有重要的意義。
本文的主要工作是完成LFMCW雷達(dá)的平動(dòng)補(bǔ)償方法研究,為后續(xù)的直升機(jī)旋翼成像以及微動(dòng)特征提取奠定基礎(chǔ)。LFMCW雷達(dá)在整個(gè)發(fā)射周期內(nèi)都發(fā)射脈沖,這個(gè)特點(diǎn)導(dǎo)致了傳統(tǒng)脈沖體制雷達(dá)的“走-停”模式不再適用,建模時(shí)必須考慮直升機(jī)在脈沖內(nèi)的運(yùn)動(dòng),此時(shí)如果將傳統(tǒng)算法用于LFMCW雷達(dá),將導(dǎo)致距離向的主瓣展寬[3],從而影響成像結(jié)果。因此,必須對(duì)LFMCW雷達(dá)的目標(biāo)脈內(nèi)運(yùn)動(dòng)進(jìn)行補(bǔ)償,其中一種較為常見的思路是參數(shù)類補(bǔ)償方法,這類方法首先估計(jì)出目標(biāo)運(yùn)動(dòng)參數(shù),并對(duì)回波進(jìn)行精確補(bǔ)償,從而完成目標(biāo)成像。基于這種思想,文獻(xiàn)[3]使用了搜索算法,將圖形對(duì)比度作為圖像質(zhì)量評(píng)價(jià)指標(biāo),對(duì)目標(biāo)的運(yùn)動(dòng)參數(shù)進(jìn)行了搜索并對(duì)目標(biāo)進(jìn)行了成像。該算法取得了較好的估計(jì)效果,但是由于該方法要對(duì)目標(biāo)參數(shù)進(jìn)行搜索,因此計(jì)算量較大。文獻(xiàn)[4]使用了包絡(luò)擬合的方法估計(jì)出目標(biāo)參數(shù),而后再進(jìn)行平動(dòng)補(bǔ)償和方位成像,該方法首先提取出一維距離像的包絡(luò)信息,而后在此基礎(chǔ)上通過擬合完成了參數(shù)估計(jì)。該方法具備一定的運(yùn)動(dòng)參數(shù)估計(jì)能力,但是當(dāng)目標(biāo)信噪比較低時(shí)該方法將失效。文獻(xiàn)[5-7]提出了Radon-Fourier變換(RFT)算法,該算法通過相參積累,提高了低信噪比條件下的檢測(cè)能力,但是該方法也是沿著速度和距離的二維搜索,因此計(jì)算量也相對(duì)較大。
本文給出了一種改進(jìn)的RFT算法實(shí)現(xiàn)運(yùn)動(dòng)補(bǔ)償。通過粗搜索和精搜索的兩步估計(jì)方法,在保證估計(jì)效果不受影響的前提下,降低了算法計(jì)算量。并通過仿真和對(duì)比實(shí)驗(yàn)驗(yàn)證了本文方法的有效性。
1 LFMCW雷達(dá)直升機(jī)回波建模
假設(shè)雷達(dá)到目標(biāo)的距離滿足遠(yuǎn)場(chǎng)條件,雷達(dá)到旋翼中心的距離為RC,直升機(jī)與雷達(dá)俯仰角為β,旋翼以恒定的角速度ω=2πfrot繞旋翼中心旋轉(zhuǎn)(frot為旋翼旋轉(zhuǎn)頻率),如圖1(a)所示。為了便于分析,考慮β=0°的情況,即此時(shí)雷達(dá)、旋翼都投影到一個(gè)平面內(nèi),如圖1(b)所示。旋翼某一個(gè)葉片上的散射點(diǎn)P到旋翼中心的距離為r(0≤r≤l,l為葉片長(zhǎng)度),P點(diǎn)到雷達(dá)的距離為RP,P點(diǎn)以角速度ω繞C旋轉(zhuǎn),初始時(shí)刻P點(diǎn)的初始旋轉(zhuǎn)角為θ。目標(biāo)的旋轉(zhuǎn)中心C點(diǎn)位于x軸上,其初始坐標(biāo)為(xC,0)。選取C為參考點(diǎn),即Rref=RC。
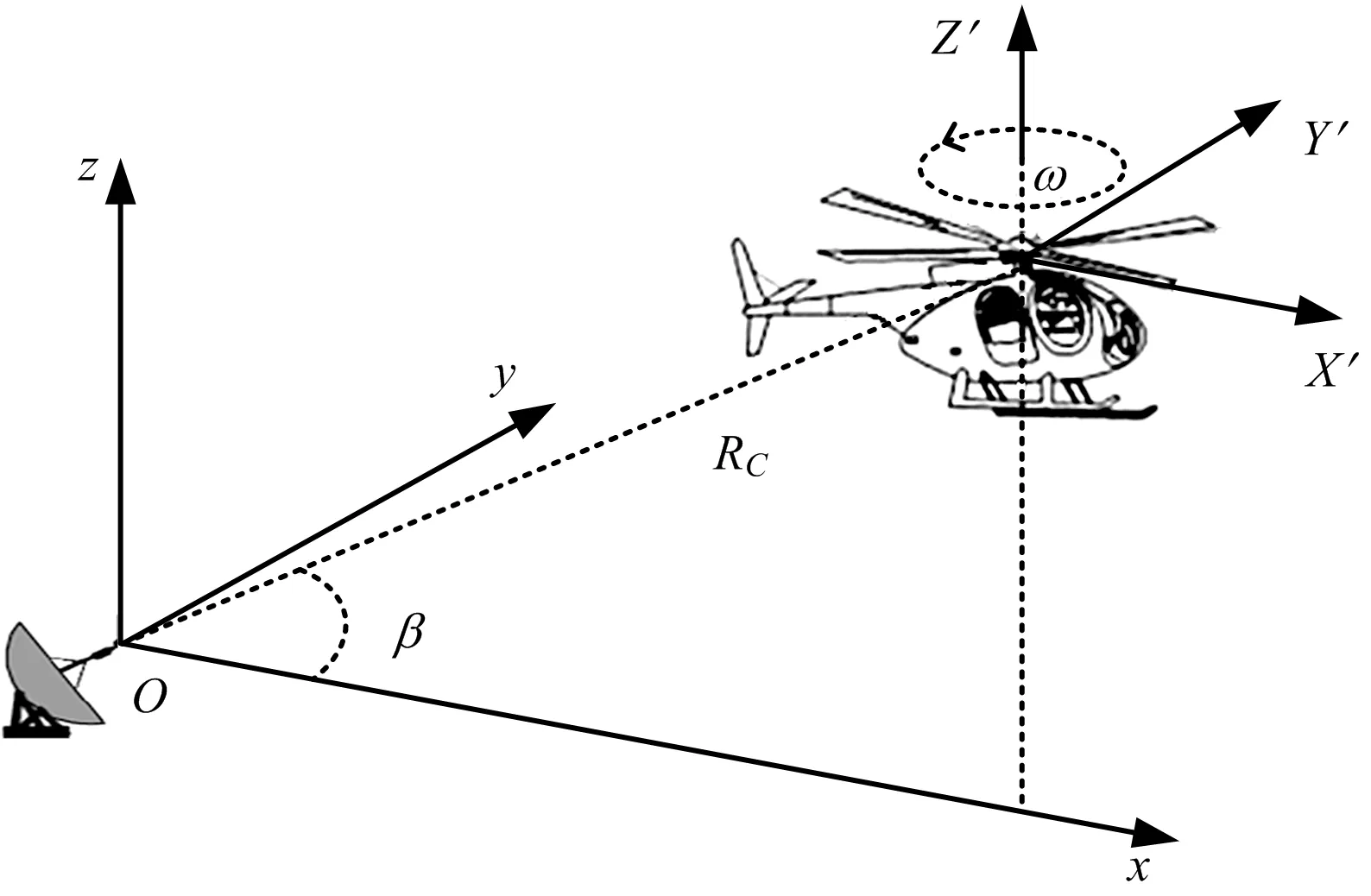
(a) 直升機(jī)與雷達(dá)在空間中的位置關(guān)系
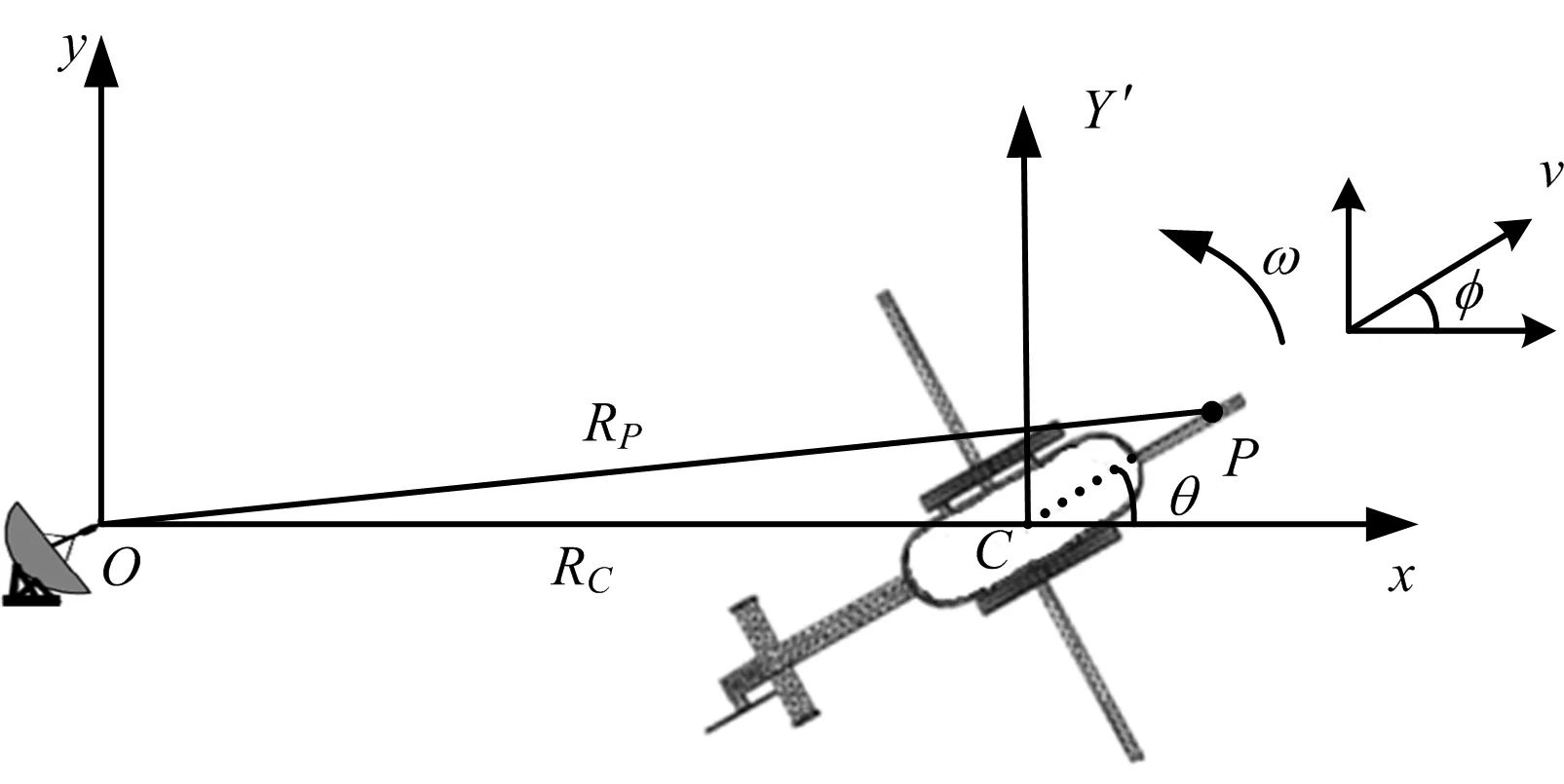
(b) 直升機(jī)與雷達(dá)在平面中的位置關(guān)系圖1 直升機(jī)與雷達(dá)關(guān)系示意圖
(1)
RQ(t)=R′(t)+xQ-yQωQt
(2)
式中,R′(t)為直升機(jī)沿雷達(dá)徑向距離的函數(shù),為散射點(diǎn)平動(dòng)部分,xP,yP為旋翼上的散射點(diǎn)位置坐標(biāo),xQ,yQ為直升機(jī)機(jī)體散射點(diǎn)位置坐標(biāo),ωP為直升機(jī)旋翼的轉(zhuǎn)速,ωQ為直升機(jī)機(jī)體等效為轉(zhuǎn)臺(tái)的角速度;可以看出,對(duì)于直升機(jī)旋翼和直升機(jī)機(jī)體,兩者的平動(dòng)部分表達(dá)式是相同的。因此,平動(dòng)補(bǔ)償只需要補(bǔ)償?shù)魞烧呦嗤絼?dòng)的部分即可。下面分析直升機(jī)沿雷達(dá)徑向距離的函數(shù)R′(t)。


由泰勒公式展開,并取前三項(xiàng),R′(t)可以近似表示為

由式(5)可以得知,雷達(dá)徑向方向上存在速度和加速度的影響。當(dāng)直升機(jī)沿固定方向勻速直線運(yùn)動(dòng)時(shí),會(huì)在雷達(dá)徑向出現(xiàn)速度以及加速度,但是加速度分量較小,可認(rèn)為對(duì)于一維距離像的平動(dòng)無影響。例如當(dāng)直升機(jī)航向與雷達(dá)視線方向垂直時(shí)(此時(shí)加速度最大),直升機(jī)速度為70 m/s,目標(biāo)距離為20 km時(shí),觀測(cè)時(shí)間為2 s,雷達(dá)帶寬為500 MHz(距離分辨率為0.3 m),此時(shí)的加速度為0.183 8 m/s2,由加速度引起的走動(dòng)距離為0.367 5 m。因此對(duì)于直升機(jī)目標(biāo)來說,其加速度對(duì)于一維距離像走動(dòng)的影響并不明顯,在對(duì)速度進(jìn)行估計(jì)的時(shí)候可以不考慮加速度的影響。但是加速度對(duì)于相位的影響不能忽略,加速度會(huì)使得直升機(jī)機(jī)體成像時(shí)方位像上的散焦,必須將加速度帶來的相位誤差進(jìn)行補(bǔ)償,加速度引起的相位誤差補(bǔ)償方法在第2節(jié)進(jìn)行說明。下面對(duì)回波信號(hào)進(jìn)行分析。
本文雷達(dá)信號(hào)為L(zhǎng)FMCW信號(hào),雷達(dá)回波為


(6)

參考信號(hào)為
式中,τref為參考時(shí)間,τref=2Rref/c。回波與參考信號(hào)作Dechirp處理,得到的中頻信號(hào)為




式中:第1項(xiàng)指數(shù)項(xiàng)為多普勒項(xiàng),它包含了目標(biāo)的多普勒信息;第2項(xiàng)為距離走動(dòng)項(xiàng),它包含了目標(biāo)在雷達(dá)上的走動(dòng)信息;第3項(xiàng)指數(shù)項(xiàng)為RVP項(xiàng),它在LFMCW雷達(dá)中可被補(bǔ)償[9];第4項(xiàng)為相位影響項(xiàng),它使得目標(biāo)回波的多普勒頻率和距離信息都產(chǎn)生了變化,估計(jì)得到目標(biāo)速度后可以對(duì)其進(jìn)行補(bǔ)償。
可以看出,由于LFMCW雷達(dá)時(shí)寬較大,目標(biāo)在脈內(nèi)的運(yùn)動(dòng)不能被忽略,導(dǎo)致了脈壓后一維距離像主瓣的展寬[3],使得傳統(tǒng)成像方法效果變差。為了解決該問題,需要對(duì)相位進(jìn)行精確補(bǔ)償。下面,本文提出一種改進(jìn)的RFT方法來完成平動(dòng)補(bǔ)償。
2 基于改進(jìn)RFT算法的目標(biāo)速度估計(jì)與補(bǔ)償方法
RFT方法是用于低信噪比條件下目標(biāo)檢測(cè)的一種有效工具,它可以實(shí)現(xiàn)在低信噪比條件下的目標(biāo)檢測(cè)。RFT利用速度與多普勒的關(guān)系進(jìn)行相位補(bǔ)償,并沿運(yùn)動(dòng)軌跡進(jìn)行相參積累,其表達(dá)式[5]為
2.1 基于改進(jìn)Radon-Fourier變換的運(yùn)動(dòng)參數(shù)粗估計(jì)
RFT算法的實(shí)現(xiàn)是采用先Radon變換對(duì)原始信號(hào)空間繞中心旋轉(zhuǎn),然后沿慢時(shí)間進(jìn)行多普勒濾波,從而實(shí)現(xiàn)相參積累[10]。Radon變換旋轉(zhuǎn)的角度對(duì)應(yīng)著目標(biāo)的速度,當(dāng)旋轉(zhuǎn)的角度為θ時(shí),對(duì)應(yīng)的速度v(θ)為
(10)
而后,沿著慢時(shí)間方向進(jìn)行相參積累,并記錄下此時(shí)不同距離對(duì)應(yīng)的峰值W(θ):
W(θ)=maxrG(r,θ)
(12)


(13)
改進(jìn)的RFT變換示意圖如圖2所示。通過RFT變換,不同目標(biāo)上的散射點(diǎn)將會(huì)進(jìn)行相參積累,由于目標(biāo)主體上所有散射點(diǎn)的平動(dòng)成分是相同的,因此對(duì)于一維距離像RFT變換進(jìn)行積累可以得到若干個(gè)θ坐標(biāo)相同、r坐標(biāo)不同的點(diǎn)。
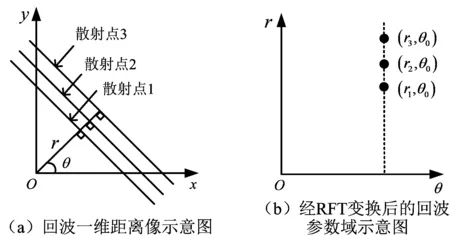
圖2 改進(jìn)RFT算法示意圖
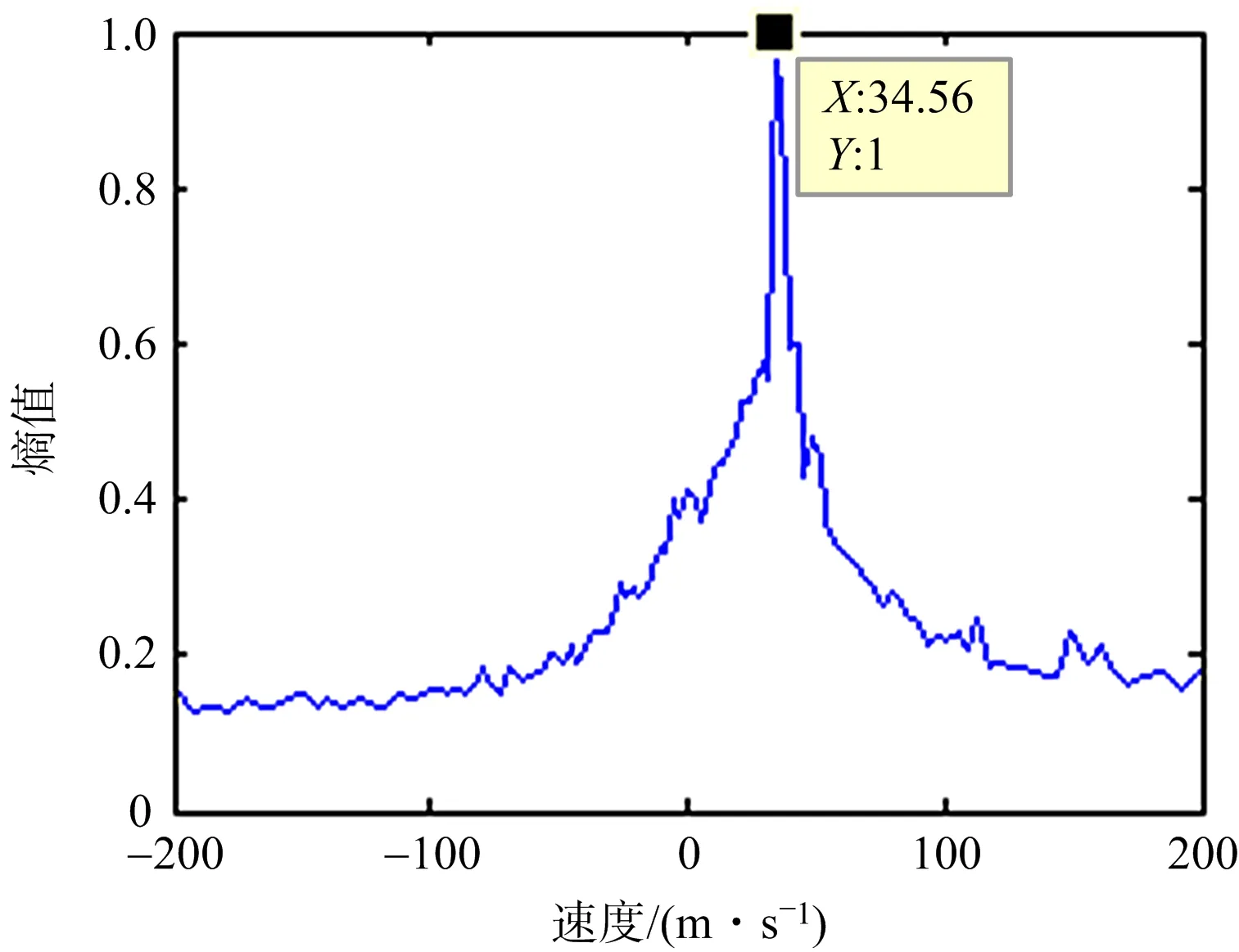
2.2 基于Tsallis熵的平動(dòng)速度精估計(jì)
巴西物理學(xué)家C.Tsallis提出了一種廣義的非廣延熵,即Tsallis熵。Tsallis熵通過選擇合適的非廣延參數(shù)使得原先廣延統(tǒng)計(jì)無法解釋的現(xiàn)象得到了解決。文獻(xiàn)[11]中通過分析和對(duì)比,得到了Tsallis熵比Shannon熵更加適應(yīng)ISAR相位補(bǔ)償這樣的非廣延系統(tǒng)的結(jié)論,因此本節(jié)引入Tsallis熵進(jìn)行速度的精估計(jì),Tsallis熵定義[11]為

由得到的速度粗估計(jì)結(jié)果,首先對(duì)Dechirp后的回波進(jìn)行平動(dòng)補(bǔ)償,補(bǔ)償項(xiàng)為


S=SIF·H
(17)
然后對(duì)該信號(hào)進(jìn)行脈壓,并進(jìn)行方位成像后,最終的圖像可以表示為
P=FFT2[FFT1S]
(18)
式中,F(xiàn)FT1·表示對(duì)距離向進(jìn)行傅里葉變換,F(xiàn)FT2·表示對(duì)方位向進(jìn)行傅里葉變換。

2.3 速度估計(jì)誤差和加速度的相位校正
完成速度估計(jì)后,可以通過式(16)對(duì)LFMCW雷達(dá)Dechirp的回波進(jìn)行補(bǔ)償。但是補(bǔ)償完成后相位中仍有補(bǔ)償不完全的部分。其中一方面是由速度估計(jì)誤差導(dǎo)致的,另一方面是由于加速度對(duì)相位的影響造成的。此時(shí)的相位項(xiàng)中包含的相位為


補(bǔ)償完成后,可利用CEMD[13]等算法對(duì)回波進(jìn)行分離,進(jìn)而完成對(duì)旋翼和機(jī)體的成像,完整的流程如圖3所示。
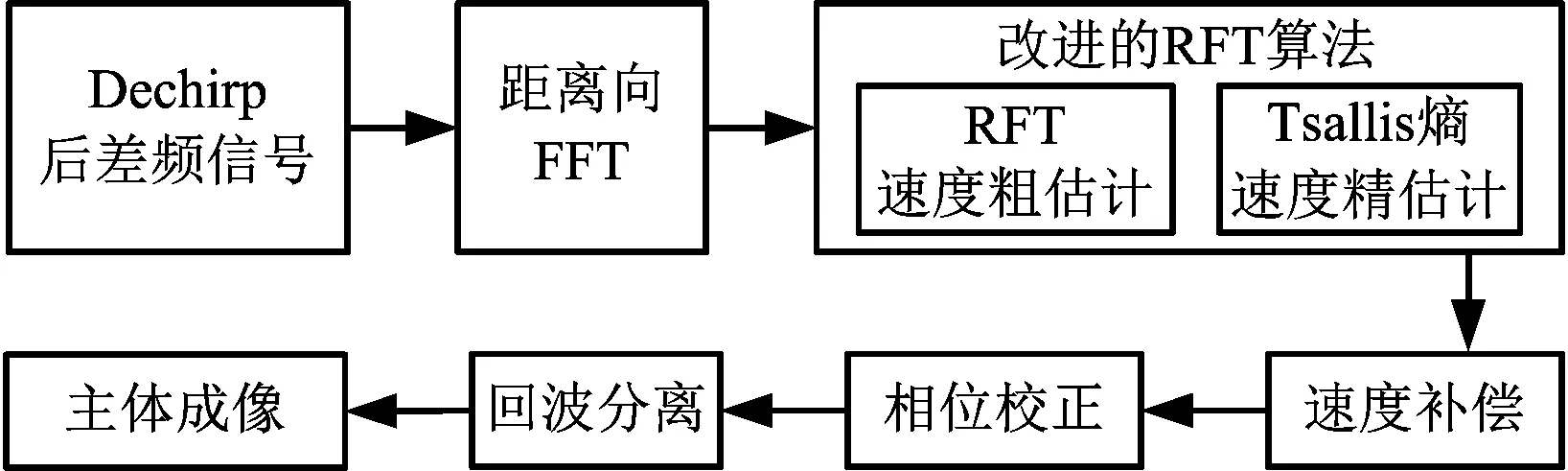
圖3 速度估計(jì)與成像流程圖
3 抗噪性能和計(jì)算量分析
本文定義的信噪比均為脈壓后的信號(hào)功率與噪聲功率的比值。假設(shè)脈壓后的噪聲為高斯白噪聲,定義為

3.1 抗噪性能分析
在速度的粗估計(jì)中,對(duì)速度v進(jìn)行了搜索,搜索的同時(shí)沿回波慢時(shí)間方向進(jìn)行了相參積累,最終通過積累峰值判斷出速度的估計(jì)值,其中相參積累使用的是FFT算法;在速度的精估計(jì)中,基于Tsallis熵進(jìn)行了速度的搜索,通過邊搜索邊方位成像的方法確定了速度的精估計(jì)結(jié)果,其中方位成像時(shí)經(jīng)過FFT算法后信號(hào)將相參積累,由于信號(hào)是離散的,F(xiàn)FT后的幅度與采樣點(diǎn)數(shù)相關(guān),積累后信號(hào)對(duì)應(yīng)的幅值將變?yōu)锳M,此時(shí)信噪比將變?yōu)?/p>

可以看到,不管是粗估計(jì)還是精估計(jì),它們的信噪比都會(huì)得到20lgMdB的提升。通過理論分析可以說明本文方法具有在低信噪比條件下對(duì)飛機(jī)速度進(jìn)行估計(jì)的能力。
3.2 計(jì)算量分析
根據(jù)文獻(xiàn)[7]的分析,基于FFT算法的RFT計(jì)算復(fù)雜度為Nr5Jlog2(Nr)+18M+15Nv+10Jlog2(J),其中,Nr,Nv分別為距離搜索單元個(gè)數(shù)和速度搜索單元個(gè)數(shù),M為回波方位向采樣點(diǎn)數(shù),J=M+Nv。本文的改進(jìn)方法中,相當(dāng)于減少了對(duì)速度的搜索,如果減少搜索量為γ,那么改進(jìn)算法的計(jì)算復(fù)雜度將比原有的復(fù)雜度有所降低。但改進(jìn)后由于加入了精搜索,因此還需精搜索部分的計(jì)算量。精搜索的計(jì)算量為L(zhǎng)×N× log2M,其中N為距離像采樣點(diǎn)數(shù),L為精搜索的搜索次數(shù)。例如,若Nr=Nv=M=N=500,γ=400,L=400時(shí),RFT算法的計(jì)算量為8.05× 107,改進(jìn)RFT算法的計(jì)算量為4.82×107,效率提升了41.12%。
4 仿真與分析
本文所有實(shí)驗(yàn)均在操作系統(tǒng)為Windows 7的計(jì)算機(jī)上實(shí)現(xiàn)的,仿真平臺(tái)為Matlab R2008b,計(jì)算機(jī)主要參數(shù)如下:處理器為Intel酷睿E7500,主頻為2.93 GHz,內(nèi)存為2 GB。仿真內(nèi)容為基于LFMCW雷達(dá)的直升機(jī)速度估計(jì)。直升機(jī)模型和旋翼葉片模型如圖4所示。雷達(dá)載頻為10 GHz,脈沖寬度為2 ms,帶寬為500 MHz,觀測(cè)時(shí)間為1 s,噪聲為脈壓后添加的高斯白噪聲。仿真分兩部分,第一部分的仿真內(nèi)容為傳統(tǒng)成像方法(非參數(shù)類)與本文方法(參數(shù)類)的成像效果對(duì)比;第二部分的仿真內(nèi)容為本文方法與其他參數(shù)類方法在計(jì)算量、估計(jì)精度上的對(duì)比。
本文選用某型直升機(jī)作為仿真對(duì)象。直升機(jī)機(jī)身長(zhǎng)度為20 m,旋翼半徑為10 m,旋翼轉(zhuǎn)速為4 rad/s(對(duì)應(yīng)的角速度為8π rad/s)。直升機(jī)速度為70 m/s,雷達(dá)距離目標(biāo)20 km,航向與雷達(dá)視線方向成60°(直升機(jī)徑向速度為35 m/s,徑向加速度為0.183 8 m/s2)。散射點(diǎn)模型如圖4所示。
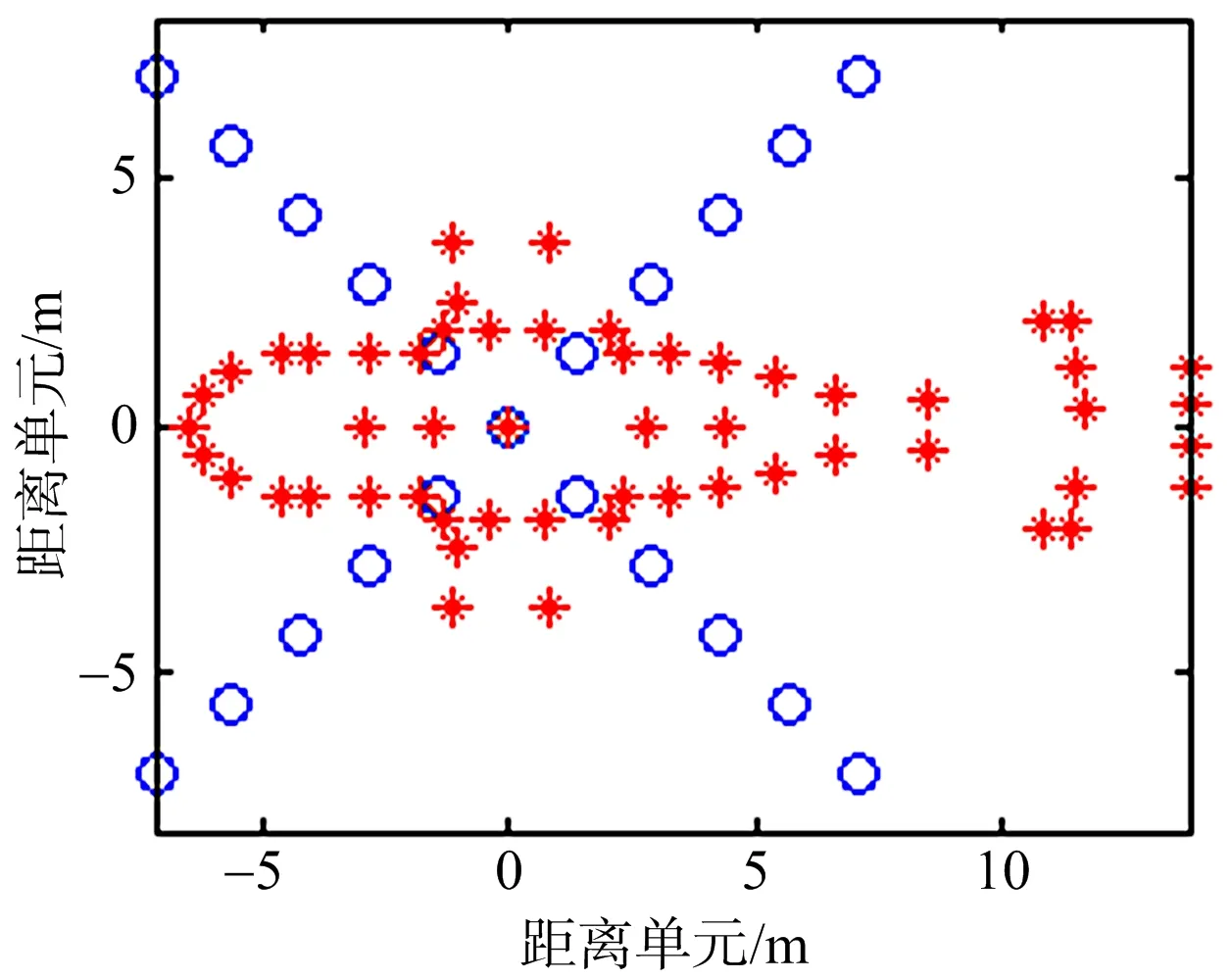
圖4 某型直升機(jī)的散射點(diǎn)模型
(a) 傳統(tǒng)方法1(熵值9.42)
(b) 傳統(tǒng)方法2(熵值9.48)
(c) 傳統(tǒng)方法3(熵值9.43)
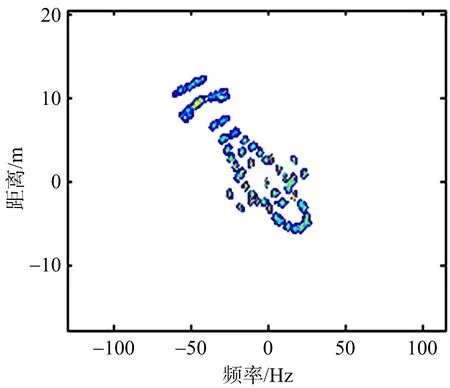
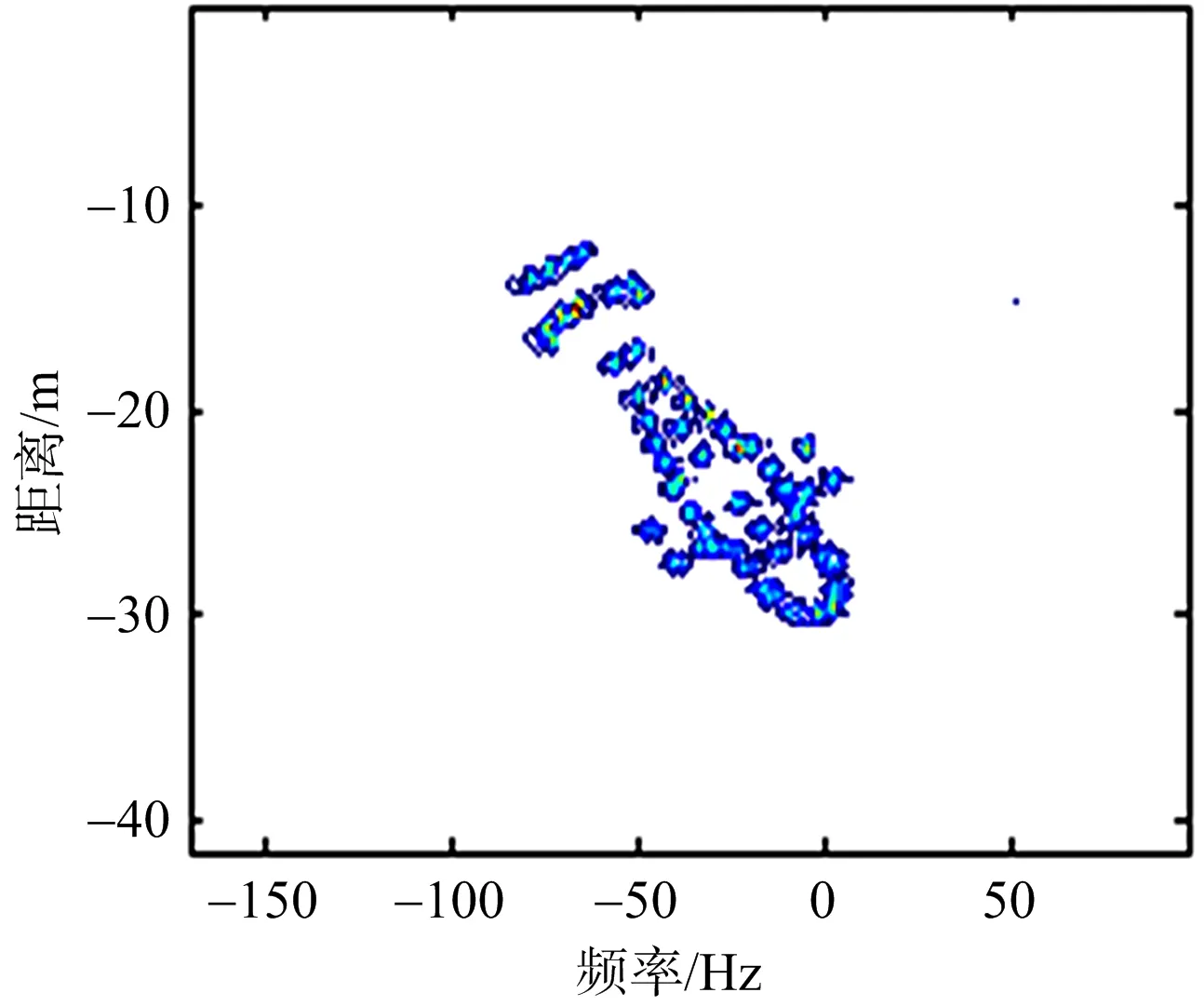
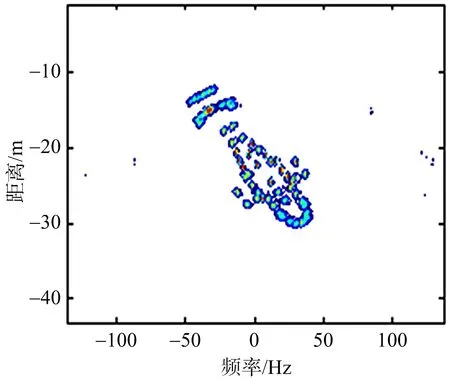
(d) 本文成像結(jié)果(熵值8.01)圖5 傳統(tǒng)成像方法成像效果及熵值
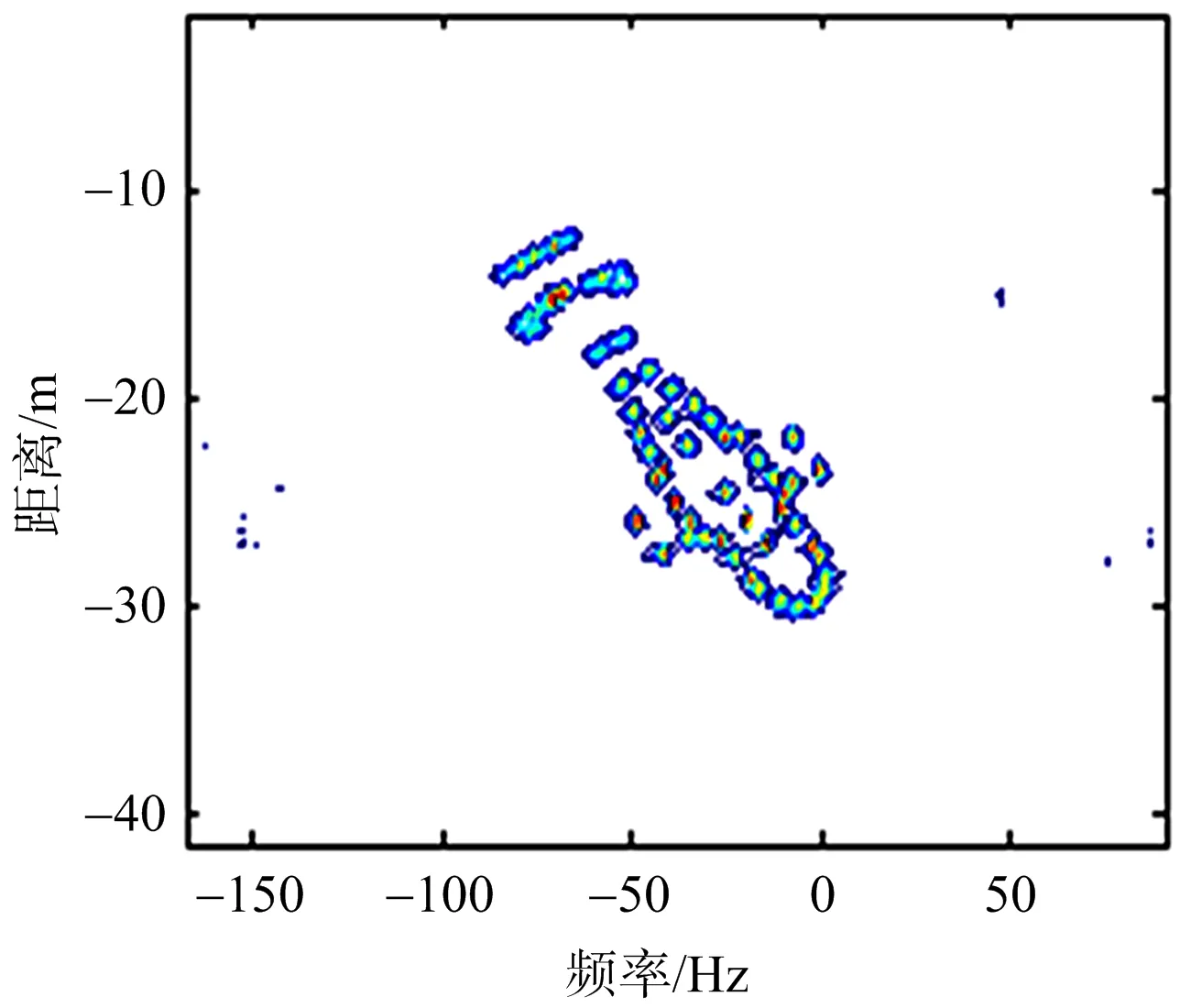
(a) 改進(jìn)RFT變換粗估計(jì)結(jié)果
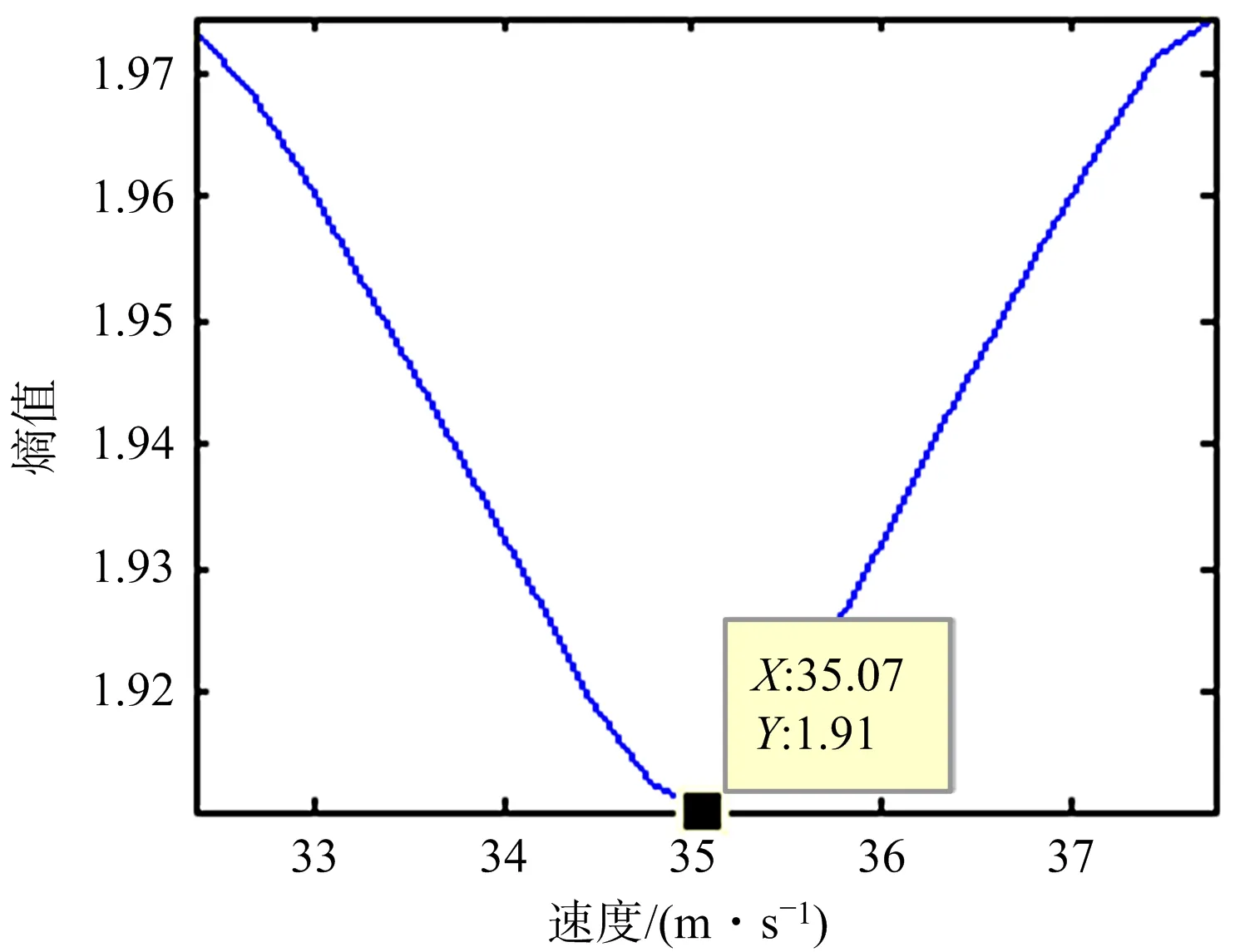
(b) Tsallis熵搜索精估計(jì)結(jié)果圖6 速度估計(jì)和成像結(jié)果
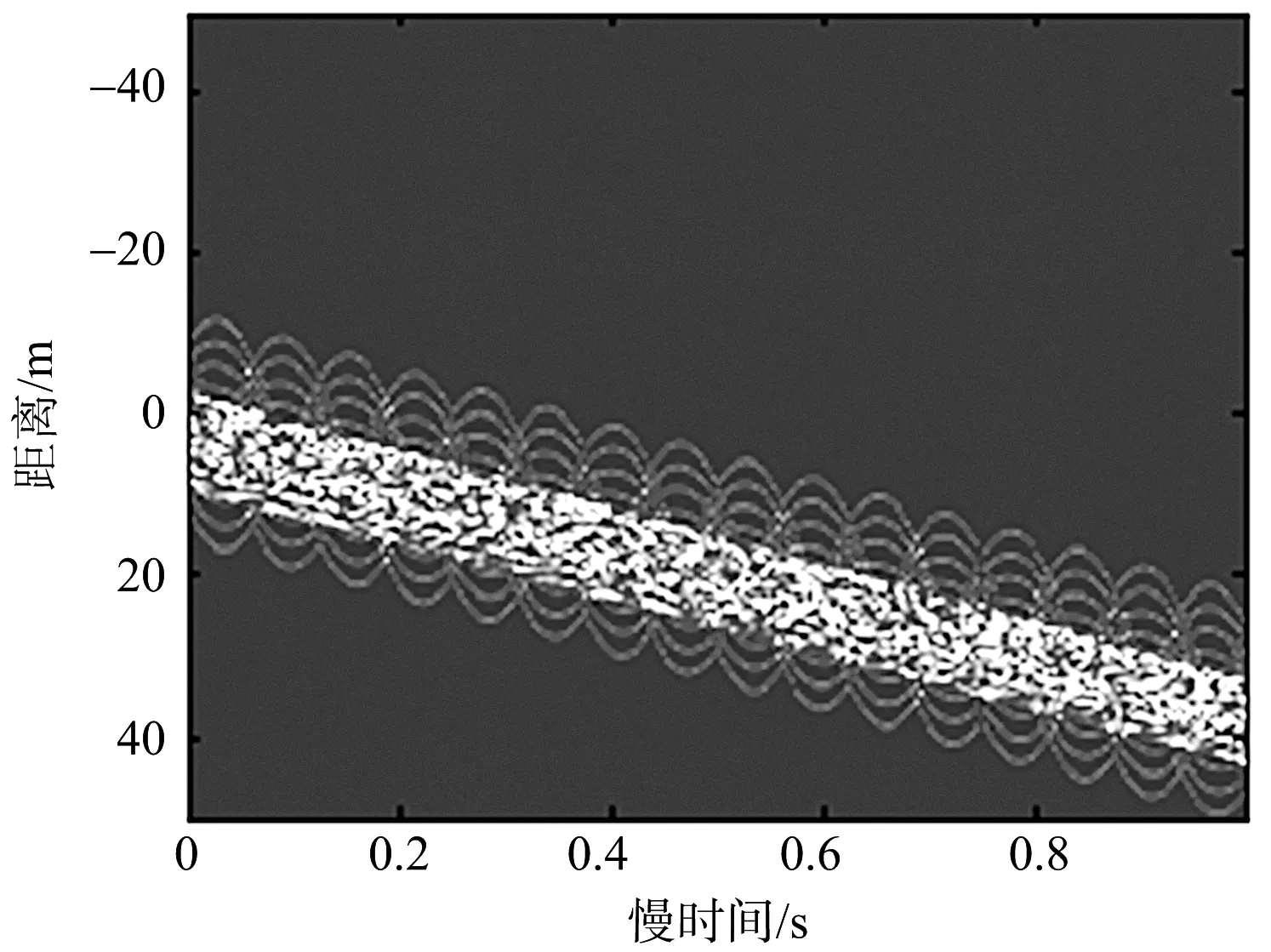
(a) 未運(yùn)動(dòng)補(bǔ)償?shù)囊痪S距離像
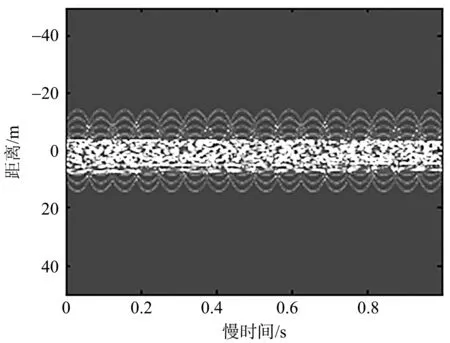
(b) 運(yùn)動(dòng)補(bǔ)償后的一維距離像圖7 運(yùn)動(dòng)補(bǔ)償結(jié)果
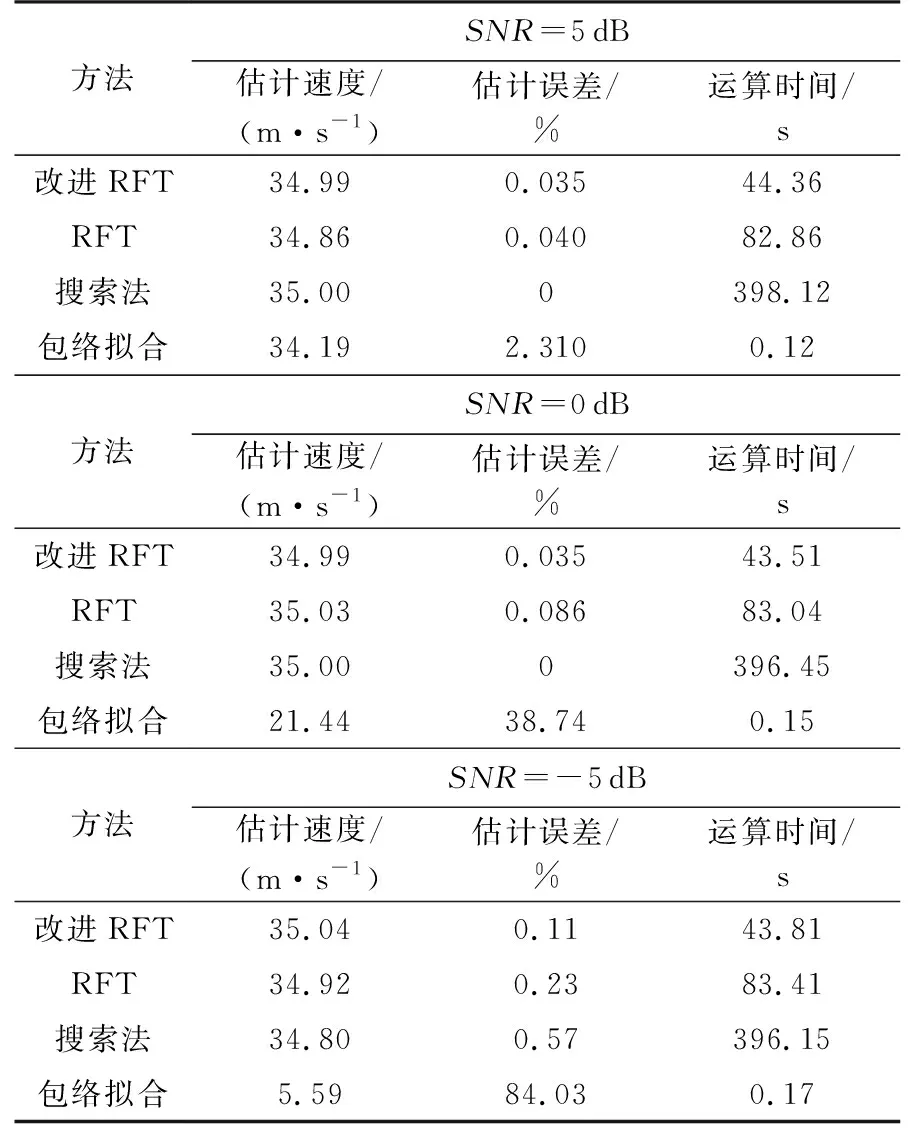
方法SNR=5dB估計(jì)速度/(m·s-1)估計(jì)誤差/%運(yùn)算時(shí)間/s改進(jìn)RFT34.990.03544.36RFT34.860.04082.86搜索法35.000398.12包絡(luò)擬合34.192.3100.12方法SNR=0dB估計(jì)速度/(m·s-1)估計(jì)誤差/%運(yùn)算時(shí)間/s改進(jìn)RFT34.990.03543.51RFT35.030.08683.04搜索法35.000396.45包絡(luò)擬合21.4438.740.15方法SNR=-5dB估計(jì)速度/(m·s-1)估計(jì)誤差/%運(yùn)算時(shí)間/s改進(jìn)RFT35.040.1143.81RFT34.920.2383.41搜索法34.800.57396.15包絡(luò)擬合5.5984.030.17

圖8 傳統(tǒng)算法與本文算法在不同信噪比條件下的誤差
5 結(jié)束語(yǔ)
本文針對(duì)脈沖體制雷達(dá)的非參數(shù)類平動(dòng)補(bǔ)償方法不能完全應(yīng)用到LFMCW雷達(dá)中的問題,提出了一種基于改進(jìn)RFT算法的參數(shù)類補(bǔ)償方法。首先,基于改進(jìn)RFT算法進(jìn)行了速度的粗估計(jì),并在此基礎(chǔ)上得到了速度的誤差范圍;其次,基于Tsallis熵對(duì)成像結(jié)果進(jìn)行了搜索,當(dāng)熵值最小時(shí)得到了速度的精確估計(jì)結(jié)果,并用該值構(gòu)建補(bǔ)償函數(shù)對(duì)回波進(jìn)行補(bǔ)償;最后,通過相位校正修正了速度估計(jì)誤差和加速度對(duì)于相位的影響。該方法在不降低原有方法抗噪性能的同時(shí),減少了計(jì)算量,提升了算法效率,為后續(xù)的LFMCW雷達(dá)微動(dòng)特征提取奠定了基礎(chǔ)。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56