基于三維激光點云數(shù)據(jù)的冷卻塔傾斜監(jiān)測研究
2018-11-02 05:23:22李志剛姜顏笑閻躍觀
測繪工程 2018年11期
李志剛,姜顏笑,閻躍觀,李 軍
(中國礦業(yè)大學(xué)(北京) 地球科學(xué)與測繪工程學(xué)院,北京 100083)
近年來,三維激光掃描技術(shù)飛速發(fā)展,所獲得的點云數(shù)據(jù)具有空間三維化、數(shù)據(jù)量大、密度高、數(shù)據(jù)信息含有被掃描物體的光學(xué)特征[1]等特點,其應(yīng)用領(lǐng)域也越來越廣。姚艷麗等[2]結(jié)合實驗將灰色模型應(yīng)用于三維坐標(biāo)位移的預(yù)測中。趙陽等[3]闡述了地面三維激光掃描技術(shù)在測速效率、三維建模、模型化精度等方面具有較大的優(yōu)勢。劉希林等[4]將三維激光掃描技術(shù)應(yīng)用于水土保持和生態(tài)建設(shè)方面。周華偉等[5]通過建立古建筑數(shù)據(jù)庫,設(shè)計基于地理信息系統(tǒng)的古建筑數(shù)字保護系統(tǒng),結(jié)果表明,三維激光掃描結(jié)合GIS技術(shù)用于古建筑數(shù)字化保護具有重要意義。趙淳等[6]基于三維激光掃描數(shù)據(jù)建立三維模型,根據(jù)模型提取差異化防雷評估所需參數(shù),進而進行防雷性能評估,并證明其有效性。雖然復(fù)雜環(huán)境下地面三維激光掃描技術(shù)還存在一定的局限性,但隨著該技術(shù)的不斷成熟,其已成為空間數(shù)據(jù)獲取的重要技術(shù)手段。基于其所得數(shù)據(jù),三維建模的應(yīng)用亦愈發(fā)廣泛,其中欒悉道等[7]針對基于圖像建模與繪制(IBMR)系統(tǒng)進行建模,并對其進行紋理映射和貼圖,該方法具有無需任何拓?fù)湫畔⒌闹С志涂梢院喕麟A段的處理與顯示的優(yōu)點,但是沒有避免數(shù)據(jù)的缺失。管西鵬等[8]運用Delaunay三角剖分算法對樹葉進行三維建模,但是需要通過拓?fù)潢P(guān)系,減少畸形三角單元的生成,確保整個三角網(wǎng)格質(zhì)量達(dá)到最優(yōu)。而羅寒等[9]針對復(fù)雜環(huán)境,開發(fā)出融合激光掃描和多視圖影像的模型重建技術(shù)。
以上基于三維激光掃描技術(shù)的應(yīng)用還處在探索與飛速發(fā)展階段中,對于三維激光掃描數(shù)據(jù)應(yīng)用在冷卻塔傾斜監(jiān)測方面的研究比較薄弱,而基于傳統(tǒng)測量手段進行的冷卻塔傾斜監(jiān)測工作量大而且不易操作。在此之前,謝雄耀等[10]針對隧道全斷面分析進行三維激光掃描并建模,對圓柱面進行擬合,從而提取中軸線,但是這種方法只適用于圓形較小的隧道,而且不適用于擬合殘差的情況。蔡來良[11]等人通過點云平面擬合進行三維激光掃描技術(shù)的變形監(jiān)測研究能滿足常規(guī)數(shù)據(jù)較高精度處理的要求,但方法過于復(fù)雜。基于此提出特征線擬合法進行冷卻塔傾斜監(jiān)測,該方法較傳統(tǒng)測量以及其他方法的優(yōu)點在于操作簡便、處理快、精度高、可有效提高工作效率減少成本。通過對點云數(shù)據(jù)的采集、拼接與降噪處理,再運用AutoCAD和Matlab提取中軸線。在完成數(shù)據(jù)預(yù)處理后,運用AutoCAD和Matlab提取中軸線,最后通過中軸線的直線方程即可進一步計算出冷卻塔的傾斜量。
1 地面三維激光掃描技術(shù)
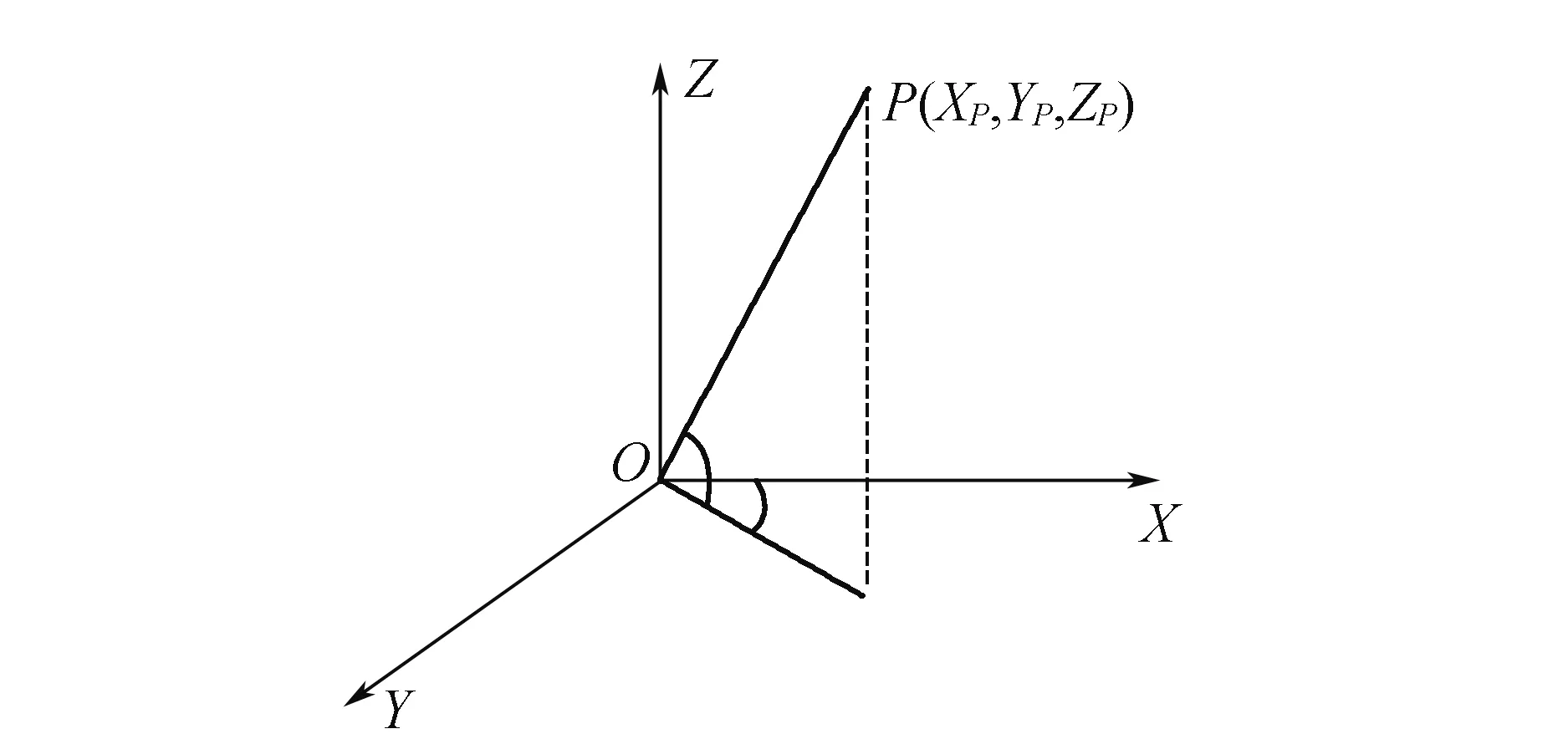
圖1 三維激光掃描儀坐標(biāo)計算示意圖
每一個掃描云點的測量都是基于三角測量原理進行的,并且根據(jù)激光掃描的傳感驅(qū)動進行三維方向的自動步進測量[12],三角測量原理則是通過儀器的激光發(fā)射器向被掃描物體發(fā)射電磁波信號,同時接收被掃描物體反射回來的電磁波信號,利用信號發(fā)射與接收的時間差計算得到儀器(坐標(biāo)原點)到掃描點之間的景深距離(OP=S),如圖1所示。進而通過激光發(fā)射器和CCD基于角度和景深距離得到Xp,Yp,Zp坐標(biāo)(見式1),X軸為橫向掃描方向,Z軸為縱向掃描方向,Y軸與X軸、Z軸所構(gòu)成的平面垂直。
(1)
2 發(fā)電廠冷卻塔掃描數(shù)據(jù)采集與處理
2.1 數(shù)據(jù)采集儀器
此次數(shù)據(jù)采集使用的是Riegl VZ-4000型三維激光掃描系統(tǒng),由掃描儀、電源、PC機等組成。激光光束由發(fā)射器發(fā)出后經(jīng)過震鏡的折射,伴隨著掃描頭的水平轉(zhuǎn)動,采集水平360°豎直60°的立體式點云數(shù)據(jù),采集數(shù)據(jù)范圍在數(shù)據(jù)采集前進行參數(shù)設(shè)置,具體參數(shù)見表1。
2.2 掃描方案設(shè)計
設(shè)計掃描方案時,先熟悉電廠周圍環(huán)境,進行實地勘察,預(yù)先設(shè)計站點。該電廠冷卻塔周圍除左側(cè)有密集的植被而不易加設(shè)測站外,其余地方均有空地便于布站,故而整體布站較為簡單。對于三維激光掃描技術(shù),在設(shè)站時應(yīng)考慮到以下幾個方面:
1)每一站是否容易拼接,站與站之間的數(shù)據(jù)需要有同名點以便進行手動拼接;
2)電廠前遮擋物是否過多以致于造成數(shù)據(jù)缺失,從而影響到后期數(shù)據(jù)拼接工作;
3)現(xiàn)場采集時應(yīng)盡量避免點云數(shù)據(jù)的噪聲。
基于以上3點,本文設(shè)計6個站點進行數(shù)據(jù)采集,由于此發(fā)電廠冷卻塔的左側(cè)建筑物和部分樹木遮擋嚴(yán)重,因而無法加設(shè)一站(見圖2),因此會導(dǎo)致此處的數(shù)據(jù)密度相對其他部位較小。但由于點云數(shù)據(jù)是均勻分布的,因此數(shù)據(jù)密度小僅相當(dāng)于將此部分?jǐn)?shù)據(jù)被均勻抽稀,后續(xù)還有將其他部分?jǐn)?shù)據(jù)抽稀以減少數(shù)據(jù)量便于數(shù)據(jù)處理的操作,故而該處數(shù)據(jù)密度小對中軸線的提取影響不大。

圖2 布設(shè)站點圖
2.3 點云數(shù)據(jù)處理
將所采集的6個測站的500萬點云數(shù)據(jù)通過RiSCAN PRO進行匹配并拼接到同一個坐標(biāo)系下。對拼接完成的數(shù)據(jù)繼續(xù)進行后續(xù)處理,去除多余數(shù)據(jù),此時得到一個完整的冷卻塔數(shù)據(jù)集,此時大約有100萬點。處理后的數(shù)據(jù)量非常大,因此還要對其進行重采樣,以減少數(shù)據(jù)量。重采樣減少數(shù)據(jù)量是使該部分?jǐn)?shù)據(jù)均勻減少,整體數(shù)據(jù)框架未發(fā)生改變,僅是數(shù)據(jù)密度減小,相當(dāng)于將數(shù)據(jù)均勻抽稀,這對之后運用最小二乘擬合提取中軸線以及計算傾斜量影響不大,可以加快數(shù)據(jù)處理速度。具體步驟如圖3所示。
2.3.1 點云數(shù)據(jù)拼接
三維激光掃描儀在采集數(shù)據(jù)時從不同測站點獲取數(shù)據(jù),從而拼接形成一個整體,但從不同的測站點獲取點云數(shù)據(jù)其測站點的坐標(biāo)系統(tǒng)并不統(tǒng)一,故在此基礎(chǔ)上,還需要將不同測站點數(shù)據(jù)拼接起來使之處于一個坐標(biāo)系下,得到一個整體的冷卻塔數(shù)據(jù)集。
點云配準(zhǔn)拼接可分為有控制點配準(zhǔn)和標(biāo)靶配準(zhǔn)[13]以及同名點(無控制點)配準(zhǔn)等。本文使用同名點配準(zhǔn),拼接步驟分為粗拼和精確拼接,精確拼接的算法有多種,其中較經(jīng)典的為Besl等[14]提出最近鄰迭代配準(zhǔn)(iterative closest point, ICP)算法,本文采用的便是通過RiSCAN PRO基于ICP算法進行控制點拼接。拼接時要先對其進行粗配準(zhǔn),再對其進行精配準(zhǔn)。即先是采用同名控制點的手動點云拼接,再對其進行運用ICP算法進行精確配準(zhǔn)。拼接結(jié)果如圖4所示。
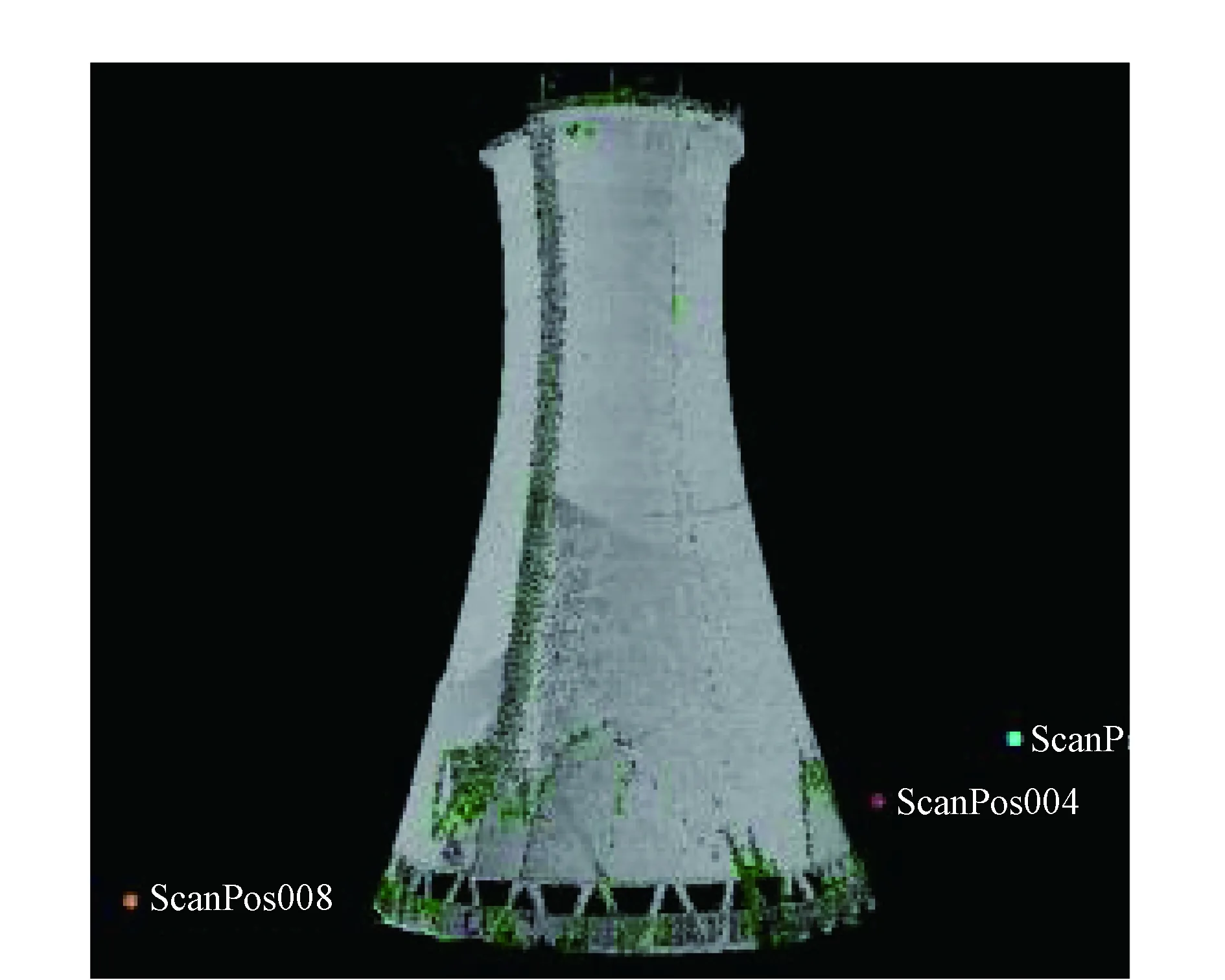
圖4 數(shù)據(jù)拼接圖
2.3.2 點云數(shù)據(jù)壓縮
三維激光掃描儀可以采集到大量的數(shù)據(jù),會給后期處理造成很大的困難,應(yīng)用前先將數(shù)據(jù)進行壓縮處理以減少數(shù)據(jù)量。而多余掃描數(shù)據(jù)以及噪聲便是主要的數(shù)據(jù)壓縮對象,即去除不必要的掃描數(shù)據(jù)和噪聲。多余的掃描數(shù)據(jù)是不需要的數(shù)據(jù),與被研究對象在空間無聯(lián)系,在除噪前直接刪除即可。因此噪聲是本文的主要處理對象,產(chǎn)生噪聲的主要原因有3種:
1)掃描時儀器本身的系統(tǒng)誤差,主要有角度掃描誤差與距離測量誤差。
2)在掃描過程中因為一些偶然因素產(chǎn)生的噪聲,可能產(chǎn)生于掃描時構(gòu)筑物前有行人、車輛等的往來通過。這些噪聲點容易分辨,可以手動刪除。
3)由掃描構(gòu)筑物自身原因而產(chǎn)生的噪聲。
點云的噪聲點會對后期的曲面擬合和網(wǎng)格建模等工作帶來困難。有統(tǒng)計結(jié)果表明,在獲取的點云數(shù)據(jù)中,有0.1%~5%的噪聲點要予以剔除[15]。
據(jù)此先在Riscan Pro中進行除噪處理,常見的去噪方法有:觀察法、有序點云去噪方法(曲線檢查法、弦高差法、濾波法等[16])和點到平面距離的散亂點云壓縮算法[17]等。刪除電廠以外的點,包括植被以及其他不相關(guān)建筑物。
數(shù)據(jù)壓縮是建模前期工作中的重要步驟,數(shù)據(jù)量壓縮的合格與否直接關(guān)系到后期提取中軸線的難易程度,將每個站點的數(shù)據(jù)進行重采樣,并統(tǒng)一坐標(biāo)系,得到縮減數(shù)據(jù)后的數(shù)據(jù)拼接結(jié)果,該結(jié)果與未壓縮前僅僅是數(shù)據(jù)量減少,其它方面如冷卻塔形狀以及其細(xì)節(jié)方面均保持一致。在重采樣過程中,有時由于所設(shè)閾值過小而導(dǎo)致重采樣后的數(shù)據(jù)容易出現(xiàn)空洞,使數(shù)據(jù)顯示不完全,因此需要反復(fù)調(diào)整,直到數(shù)據(jù)量與模型完整度相契合,達(dá)到最好的效果。數(shù)據(jù)重采樣之后可以就選擇對象與從對話下拉列表內(nèi)選擇的對象之間設(shè)置顯示數(shù)據(jù)的偏差,生成三維色碼映射圖,以便于后期調(diào)整,保證精度。誤差分布如圖5所示。
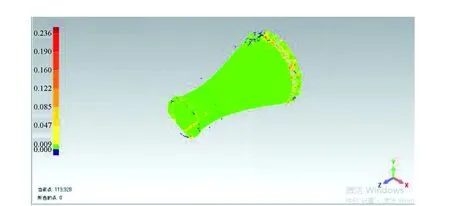
圖5 誤差分布
3 中軸線提取及傾斜計算
通過三維激光掃描技術(shù),獲得的掃描數(shù)據(jù)量很大,分布密集,縮減后仍有將近幾十萬個點,從中均勻提取一部分點作為特征點繼而擬合出橫斷面特征線。本文分別將數(shù)據(jù)壓縮至50萬點和20萬點,分別選取其大概1/10的點進行橫斷面以及中軸線提取,用以對比說明數(shù)據(jù)簡化對最終結(jié)果的影響。
關(guān)于橫斷面特征線的提取,馬娟[18]提出直接提取法與點云數(shù)據(jù)擬合法,王方建等[19]采取了Rigion Growing和RANSAC兩種有效的面片分割算法,對建筑物進行建模。而本文選取的模型具有上下部較粗,中間部分較細(xì)的特點,因此選擇在AutoCAD中提取橫斷面特征線。以20萬點為例,已知點云數(shù)據(jù)坐標(biāo),通過選擇間隔近似相等的z值的點,一個z值近似相等(由于掃描所得點云數(shù)據(jù)是分散的點,因此不會有大量z值完全相等的點)的點提取1 000個,z值相等的點通過最小二乘法擬合出z值所橫切冷卻塔的圓,這時可以得到11個圓(取11個z值),將得到的特征線放到AutoCAD中,如圖6所示。
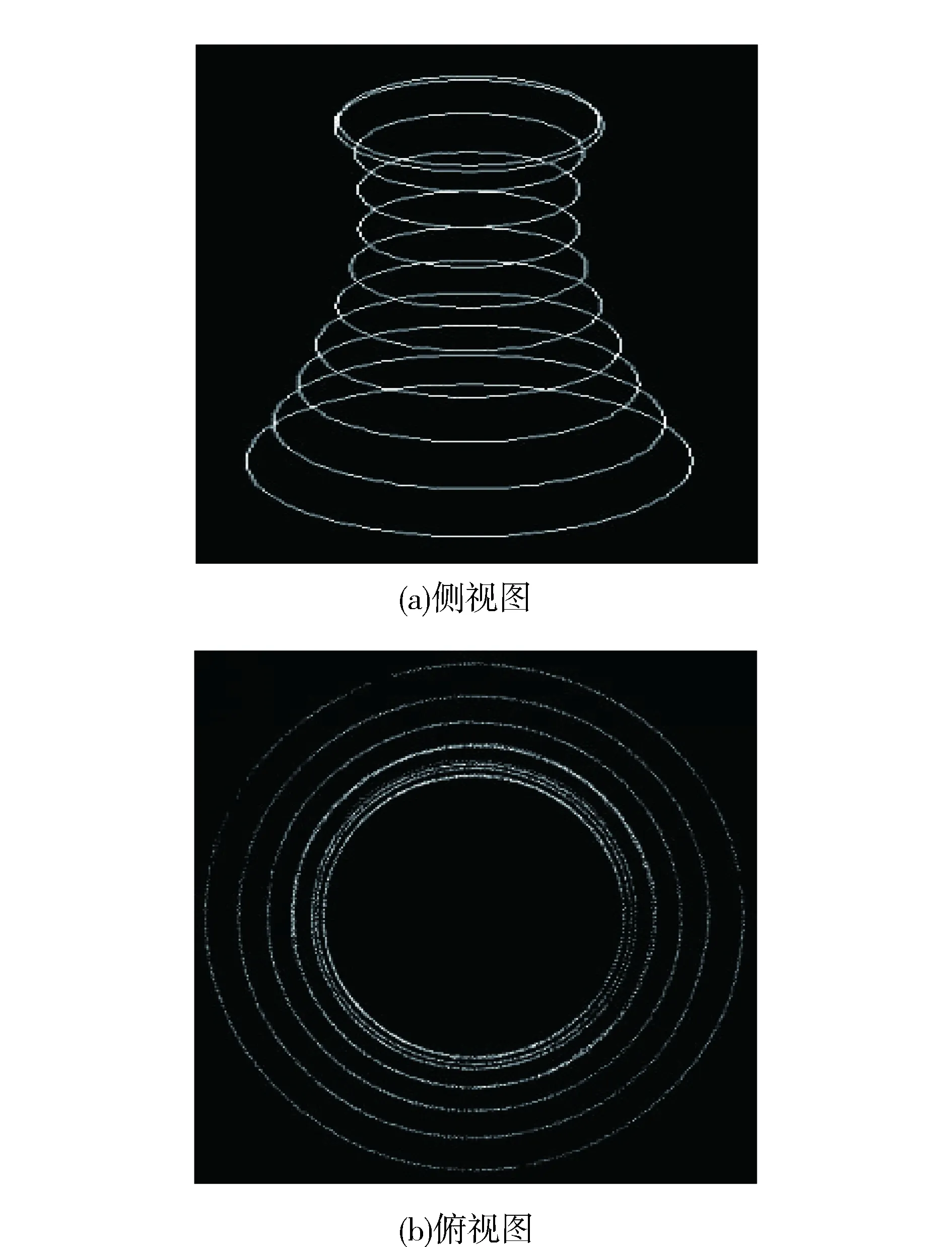
圖6 橫斷面特征線
對所選特征點利用Matlab對其進行中心線擬合,擬合出上述11個圓的圓心,再基于最小二乘原理擬合直線:選擇使“偏差平方和最小”的原則來保證每個偏差的絕對值都足夠小,從而得到最佳擬合直線。
y=φ(x).
(2)
用解析表達(dá)式逼近離散函數(shù),得到最終的中軸線。上述理論采取在Matlab中寫代碼的方法,得到模型的中軸線,如圖7所示。圖中坐標(biāo)系為相對坐標(biāo)系。
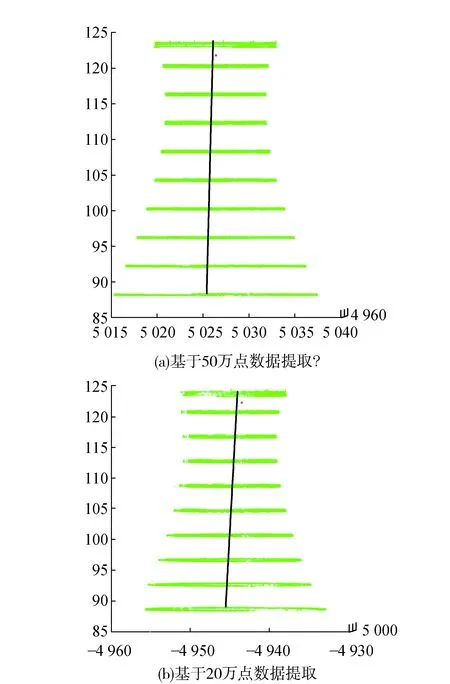
圖7 中軸線提取(正視圖)
通過對50萬點數(shù)據(jù)和20萬點數(shù)據(jù)分別提取橫斷面以及中軸線,并計算所提取的對應(yīng)圓的半徑(見表2),通過對比可知:50萬點和20萬點得到的對應(yīng)圓半徑相對誤差在2 mm以內(nèi),據(jù)此最終計算得到的結(jié)果基本一致,誤差可以忽略不計,但50萬點的數(shù)據(jù)處理速度要比20萬點的數(shù)據(jù)處理速度慢得多,因此,采用簡化后的20萬點足以滿足需求。
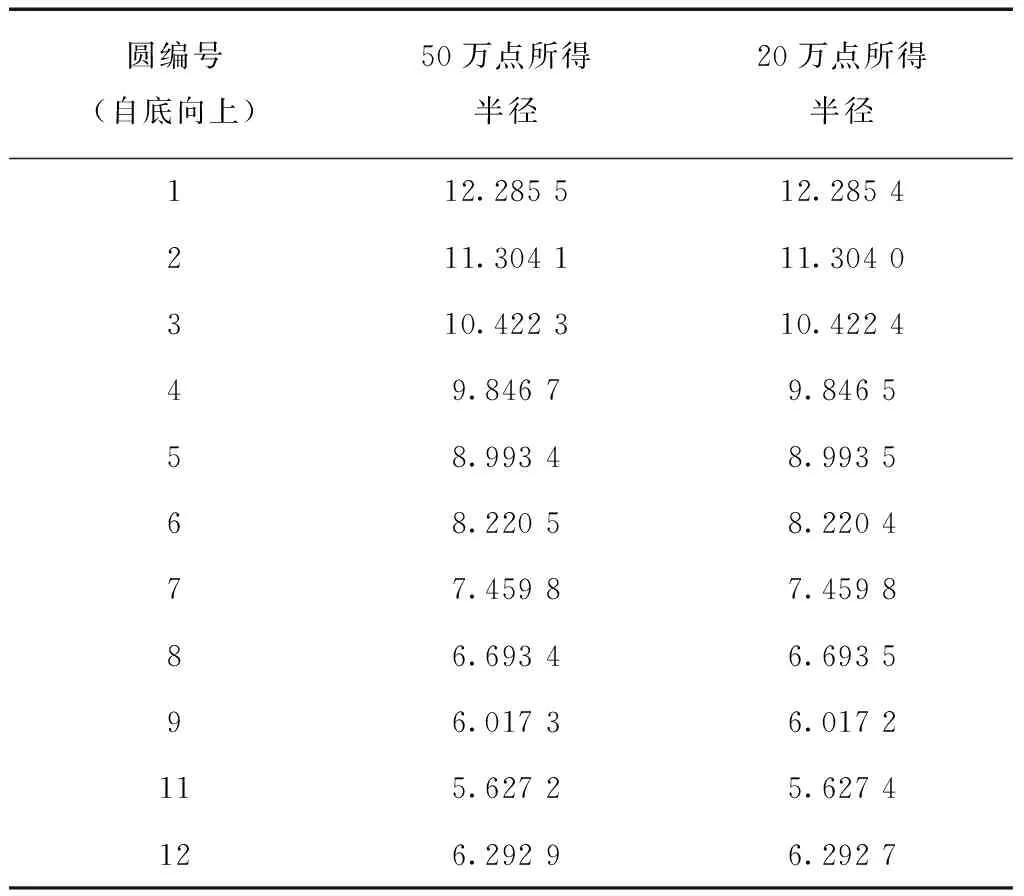
表2 50萬點與20萬點所得半徑對比 m
得到中軸線后,通過求直線與地面鉛垂線的夾角正切值的方式得到冷卻塔的傾斜量i,從而判斷其是否安全。在采集數(shù)據(jù)時,每一站采集時其z坐標(biāo)軸均為地面鉛垂線方向,故最后由控制點推算得到的各個點的坐標(biāo)其坐標(biāo)系統(tǒng)的z軸是地面鉛垂線。本文通過一種簡單的方法來求傾斜量i,即在得到的中軸線上任選兩個點A(x1,y1,z1)和B(x2,y2,z2),通過算式
(3)
求得冷卻塔傾斜i=4.5‰,該傾斜程度不影響從進風(fēng)口中進入冷卻塔中的空氣向上流動,滿足建筑安全生產(chǎn)標(biāo)準(zhǔn)。
4 結(jié)束語
以發(fā)電廠冷卻塔為研究對象,設(shè)計基于三維激光掃描技術(shù)的變形監(jiān)測方案,通過數(shù)據(jù)處理得到該冷卻塔的三維激光點云數(shù)據(jù)模型及誤差分布圖。根據(jù)點云數(shù)據(jù)模型,運用AutoCAD和Matlab提取傾斜后該冷卻塔的中軸線,并計算得出塔的傾斜量為4.5‰,滿足生產(chǎn)安全標(biāo)準(zhǔn)。本文的研究受到所用算法的迭代次數(shù)的限制,如何改進算法使得最終結(jié)果更加接近真實值,需對算法的穩(wěn)定性、運算效率等進行進一步的研究。