一種全驅(qū)動船舶的運(yùn)動鎮(zhèn)定控制器設(shè)計
2018-11-02 09:34:20昝立儒馬晶晶
船舶 2018年5期
康 釗 鄒 勁 昝立儒 馬晶晶
(哈爾濱工程大學(xué) 船舶工程學(xué)院 哈爾濱150001)
引 言
鎮(zhèn)定控制屬于船舶運(yùn)動控制研究中的一個重要研究方向,并且長時間以來都是研究的熱點與難點。鎮(zhèn)定控制也稱之為點控制,即實現(xiàn)船舶位置點定位的同時達(dá)到并保持艏向姿態(tài)的控制方法,具體來說就是將設(shè)計好的反饋控制律應(yīng)用于閉環(huán)系統(tǒng),并使之漸進(jìn)收斂于平衡點。運(yùn)動鎮(zhèn)定控制的研究始于20世紀(jì)90年代,需要系統(tǒng)內(nèi)所有自由度都必須達(dá)到鎮(zhèn)定要求。
近些年來,鎮(zhèn)定控制中比較熱門的研究當(dāng)屬船舶的動力定位控制,許多學(xué)者都對此進(jìn)行了大量的研究工作,尤其是針對欠驅(qū)動船舶提出了許多鎮(zhèn)定控制器的設(shè)計方法。程金等人[1]針對欠驅(qū)動船舶的動力定位問題,基于三自由度水面船舶的非線性模型,利用終端滑模控制理論提出一種非連續(xù)的控制方法,通過獨立設(shè)計兩個子系統(tǒng)的穩(wěn)定反饋控制律,使系統(tǒng)在原點處局部漸進(jìn)穩(wěn)定,解決了欠驅(qū)動船舶的定位控制問題,但在設(shè)計過程中沒有考慮外界擾動的影響,且沒有證明全局穩(wěn)定性。趙大威等人[2]考慮了海洋環(huán)境擾動力的影響,針對船舶動力定位控制器的設(shè)計問題,提出一種自抗擾控制技術(shù),通過設(shè)計一種非線性觀測器可以估計出船舶的運(yùn)動速度及系統(tǒng)受到的總擾動,并采用非線性反饋進(jìn)行補(bǔ)償。但在控制器的設(shè)計過程中采用一種船舶線性低頻運(yùn)動方程,沒有考慮科氏力的影響,同時出現(xiàn)了較為明顯的振蕩現(xiàn)象。吳靜等人[3]針對欠驅(qū)動船舶的運(yùn)動鎮(zhèn)定控制問題,將自適應(yīng)滑模法與反步法相結(jié)合,并由全局微分同胚變換將控制系統(tǒng)分為兩個級聯(lián)的小系統(tǒng),通過對兩個子系統(tǒng)分別設(shè)計自適應(yīng)滑模反步法控制器,證明了控制系統(tǒng)的穩(wěn)定性,設(shè)計過程考慮了時變擾動的影響,最后通過仿真驗證了控制器具有較好的控制性能。但是加入的外部擾動過于簡單,并且沒有進(jìn)行適當(dāng)?shù)南ㄌ幚恚?zhèn)定效果有待提高。
為此,本文總結(jié)前人研究的成果,針對全驅(qū)動控制這種研究較少的船舶運(yùn)動鎮(zhèn)定問題,基于反步法,同時考慮外界時變擾動的影響,設(shè)計一種具有較強(qiáng)魯棒性的運(yùn)動鎮(zhèn)定控制器。不同于一般的船舶動力定位,這種控制器的可控距離應(yīng)較大,允許偏離目標(biāo)點的位置也可較遠(yuǎn),從而用以解決全驅(qū)動船舶短距離的運(yùn)動鎮(zhèn)定控制問題。
1 全驅(qū)動船舶的運(yùn)動數(shù)學(xué)模型
針對船舶全驅(qū)動狀態(tài)下的運(yùn)動鎮(zhèn)定問題,首先要明確實際控制輸入量包括縱向推力T、轉(zhuǎn)首力矩N以及橫向推力F,需要通過三個自由度的控制輸入完成對三個自由度運(yùn)動的控制。建立船舶全驅(qū)動形式的三自由度運(yùn)動數(shù)學(xué)模型如式(1)所示:
式中:表示大地坐標(biāo)系下的船舶位置坐標(biāo); 為船舶的初始首向角;速度向量
表示隨船坐標(biāo)系下的船舶運(yùn)動速度;則為兩種不同坐標(biāo)系之間的轉(zhuǎn)換矩陣,定義數(shù)學(xué)形式如下:
式(1)中:控制輸入量 ,分別代表三個自由度的控制輸入; 表示外界環(huán)境擾動;M、D和 分別表示船舶運(yùn)動的附加質(zhì)量矩陣、阻尼矩陣以及科氏向心力矩陣,并且定義 , ;同時,定義科氏力矩陣 形式如下:
考慮到低航速下所有作用于船體上的外界干擾中,波浪作用是最主要的,因而本文只計波浪擾動的影響。根據(jù)文獻(xiàn)[4],波浪擾動模型可定義如式(4)所示:

式中:wu、wv和wr為噪聲序列。以往的仿真中通常引入理想化零均值的高斯白噪聲對外界擾動進(jìn)行表達(dá),但是理想的白噪聲只是一種理論上的抽象,在物理上則很難實現(xiàn)。因而,工程實際中測量數(shù)據(jù)所包含的噪聲往往是有色噪聲。所謂有色噪聲(或相關(guān)噪聲)是指序列中每一時刻的噪聲相關(guān)。有色噪聲可以看成是由白噪聲序列驅(qū)動的線性環(huán)節(jié)的輸出。為更真實地反應(yīng)環(huán)境噪聲,設(shè)計有色噪聲形式如下:

式中: 為有色噪聲序列; 為初值為零的高斯白噪聲。兩種噪聲序列如圖1所示。
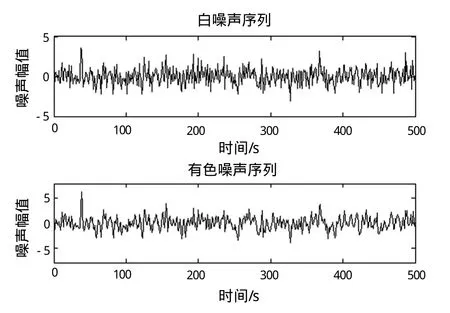
圖1 兩種噪聲序列示意圖
式中: 為增益常數(shù);ζ表示阻尼常數(shù);取ζ= 0.3;ω0為波浪頻率;σm表示波浪強(qiáng)度系數(shù),且定義波浪周期Tω=6 s;有義波高。
此時波浪擾動達(dá)到3級海況上限,滿足對外界擾動的仿真模擬。建立船舶水面運(yùn)動坐標(biāo)系如圖2所示。
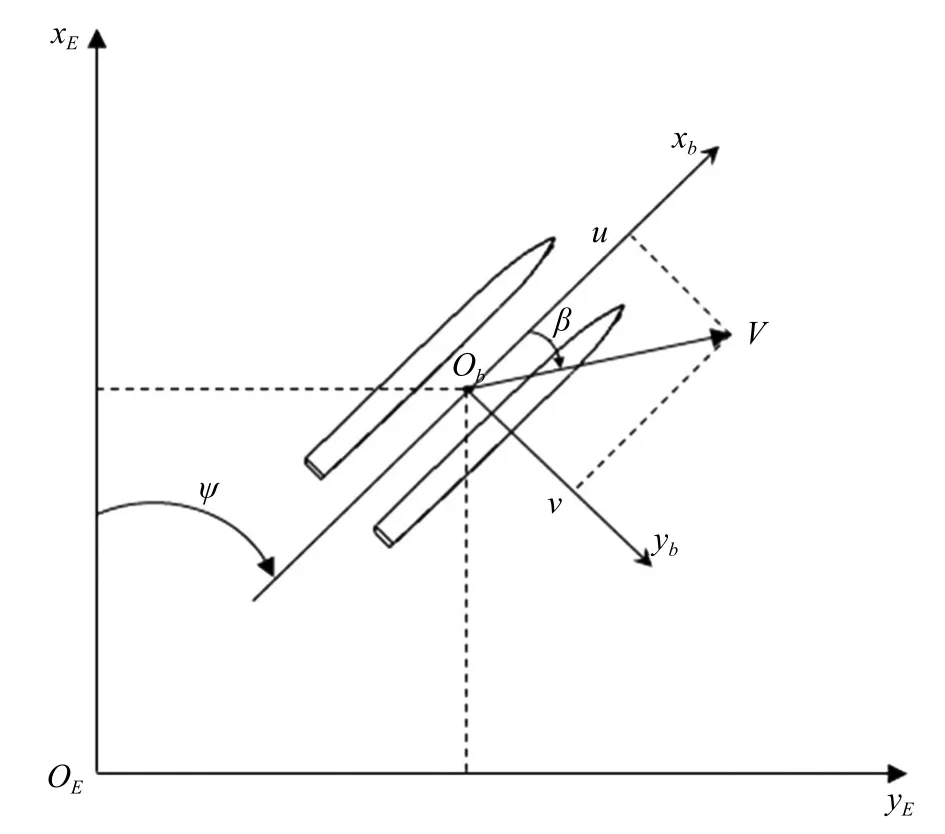
圖2 水平面運(yùn)動坐標(biāo)系
圖中,OE xE yE表示大地坐標(biāo)系,OE xE軸指向正北,OE yE指向正東;隨船坐標(biāo)系Ob xb yb建立在船舶重心處,Ob xb軸指向船首,Ob yb軸指向右舷。
本文的設(shè)計目標(biāo)是針對全驅(qū)動船舶的運(yùn)動控制系統(tǒng),考慮外界隨機(jī)波浪擾動的影響,基于反步法設(shè)計船舶的運(yùn)動鎮(zhèn)定控制器,使船舶的實際位置 達(dá)到并保持在期望目標(biāo)位置。
2 控制器的設(shè)計與證明
基于上文中制定的控制目標(biāo),進(jìn)行運(yùn)動鎮(zhèn)定控制器的設(shè)計工作,根據(jù)反步法將具體設(shè)計過程分為三部分展開。
2.1 定義位置誤差變量并進(jìn)行坐標(biāo)轉(zhuǎn)換
定義位置誤差變量為:

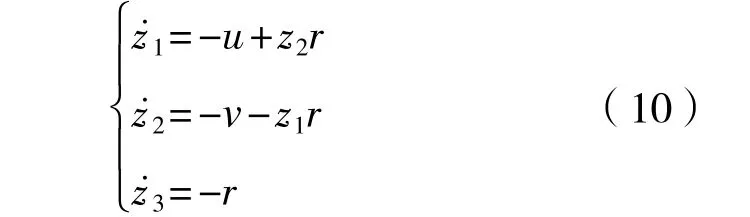
根據(jù)式(1)對上式兩邊求民并展開有:
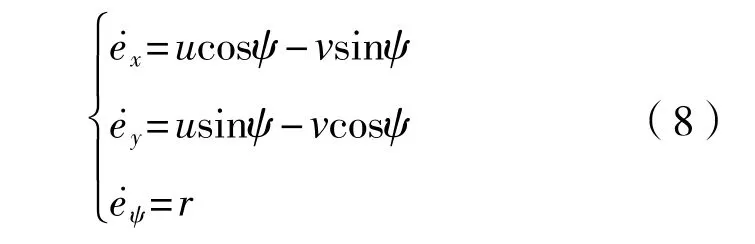
對式(8)兩邊求民得:
2.2 全驅(qū)動穩(wěn)定性證明
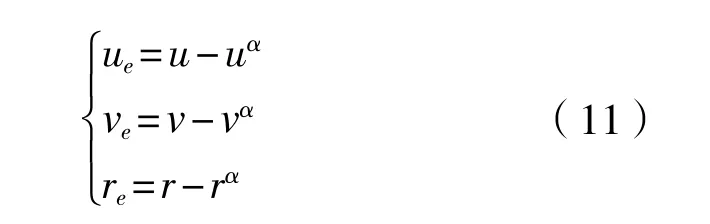
引入速度的虛擬控制量uα,vα,rα,并定義速度誤差變量ue,ve,re分別為:
設(shè)計Lyapunov函數(shù)V1為如下形式:

對其兩邊進(jìn)行求民得:
也許是早年包辦婚姻造成的精神創(chuàng)傷太重、事實上的單身生活時間太長的緣故,魯迅曾經(jīng)對自己的子嗣問題不寄予希望,即使在與許廣平結(jié)合之后,對此也一度比較消極。但是,當(dāng)1929年9月27日兒子呱呱墜地之后,魯迅親眼見證了新生命的誕生、成長,這在他的心海上不能不激起重重波瀾,此后關(guān)于父子關(guān)系的言論就打上了切身體驗的烙印。

設(shè)計虛擬控制量 形式如下:
式中:k1和k2為控制參量且有k1>0,k2>0。
將式(14)代入(13)可得:

2.3 動力學(xué)穩(wěn)定性證明
為進(jìn)一步得到系統(tǒng)的控制輸入量,首先對縱向速度誤差變量ue=u-uα求民可得:


為使系統(tǒng)收斂設(shè)計控制輸入量τu如下:


此時根據(jù)Lyapunov穩(wěn)定性定理可知,速度誤差變量ue是漸進(jìn)收斂的。


顯然對于V3和V4仍然具有:

因此根據(jù)Lyapunov穩(wěn)定性理論,速度誤差變量ve和re也是漸進(jìn)收斂的。
最后選取Lyapunov函數(shù):

對等式兩邊求民有:
進(jìn)而由Lyapunov穩(wěn)定性定理可知整體系統(tǒng)(z1,z2,z3,ue,ve,re)是全局漸進(jìn)穩(wěn)定的。通過適當(dāng)?shù)倪x取控制參量k1至k6,可以控制系統(tǒng)的收斂速度,同時可相應(yīng)的調(diào)整系統(tǒng)的控制輸入量,因此船舶的實際位置 可在有限時間內(nèi)到達(dá)并保持在期望目標(biāo)位置 。
3 仿真驗證
由于控制器接收的速度信號會因外界波浪擾動的影響而呈現(xiàn)強(qiáng)非線性,這種無規(guī)律的波動會引起控制器結(jié)構(gòu)的不穩(wěn)定,進(jìn)而造成船舶的高頻響應(yīng),降低控制性能。因此,在仿真過程中引入低通濾波器對速度信號進(jìn)行光滑優(yōu)化處理,濾除高頻干擾信號,保留低頻信號,設(shè)計形式如下:
式中 :ξ1=ξ2=ξ3=10;ω1=ω2=ω3=10。
以一艘全驅(qū)動保障船為例展開仿真研究,該船長56.38 m、重6.2×105kg。船舶運(yùn)動模型中的水
動力參數(shù)如式(26)、(27)所示。
仿真中分別引入高斯白噪聲和有色噪聲構(gòu)建外界波浪擾動,以便進(jìn)行對比,綜合驗證所設(shè)計控制器的魯棒性。仿真結(jié)果如圖3至圖8所示。
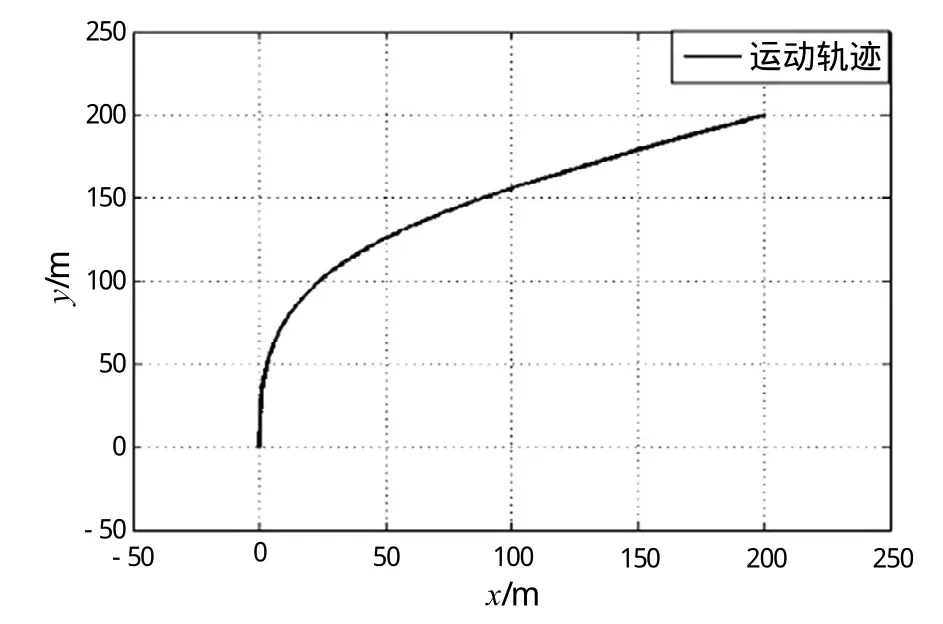
圖3 船舶在xy平面內(nèi)的運(yùn)動軌跡
經(jīng)過仿真發(fā)現(xiàn),在該控制器下引入高斯白噪聲和有色噪聲模擬外界擾動,其最終的控制效果基本相同:運(yùn)動軌跡、位置響應(yīng)曲線以及首向角響應(yīng)曲線基本一致。為簡便起見,取較為符合工程實際的有色噪聲擾動下的位置與首向角響應(yīng)曲線進(jìn)行展示,如圖4所示。
從圖3可以看出,船舶可以很好地實現(xiàn)初始位置到期望位置的運(yùn)動鎮(zhèn)定控制。結(jié)合圖4可以看出,船舶可以實現(xiàn)位置與首向角的耦合控制:在運(yùn)動過程中首先以較短時間達(dá)到了期望首向角,接著達(dá)到期望的縱向位移,最后橫向推進(jìn)逐漸到達(dá)期望位置并保持鎮(zhèn)定。
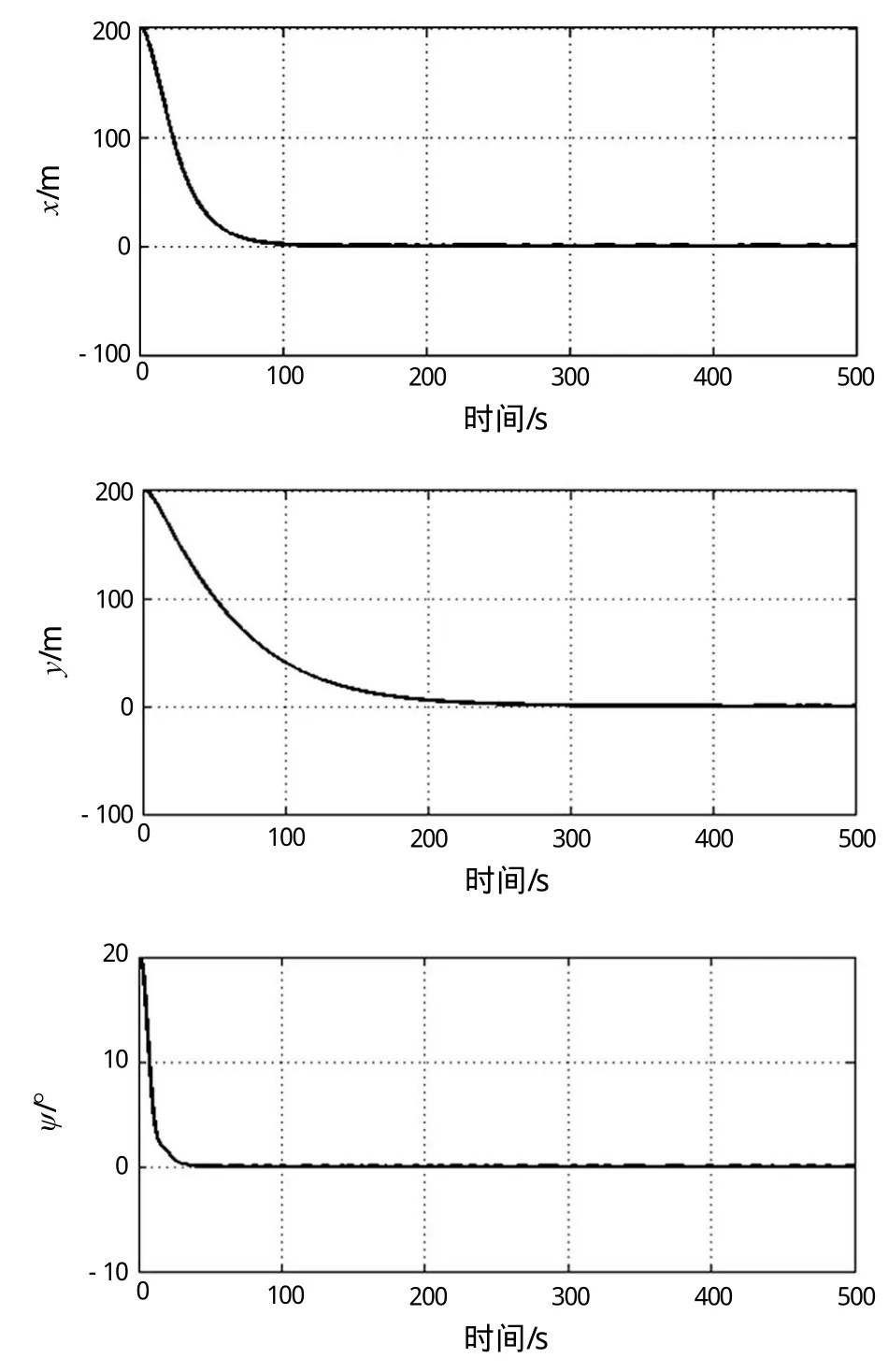
圖4 船舶實際位置(x,y)與首向角ψ
下頁圖5、圖6和圖7分別為縱向速度響應(yīng)曲線、橫向速度響應(yīng)曲線以及轉(zhuǎn)首角速度響應(yīng)曲線。從中可以看出,經(jīng)過低通濾波器的濾波作用,消去了閉環(huán)反饋控制中的高頻干擾項,各速度響應(yīng)曲線較為光順且在較短時間內(nèi)都達(dá)到了平衡狀態(tài),且在收斂后具備較強(qiáng)魯棒性,穩(wěn)定性良好。同時,在運(yùn)動鎮(zhèn)定控制器的作用下,船舶的縱向速度u控制在6 m/s(設(shè)計航速)以下,橫向速度v控制在2.5 m/s以下,這種低速狀態(tài)下可以充分發(fā)揮控制律的控制性能,且能夠保證首向側(cè)推器的正常工作(該船型首部側(cè)推器最大可抵御6 kn,約為3 m/s的海流)。同時可以看出,在有色噪聲構(gòu)建的波浪擾動下,速度響應(yīng)曲線波動較大。在理想化高斯白噪聲構(gòu)建的波浪擾動下,速度響應(yīng)曲線波動較小,但是波動幅度相差不大,是可接受的。控制效果基本一致,都具有較強(qiáng)的魯棒性。
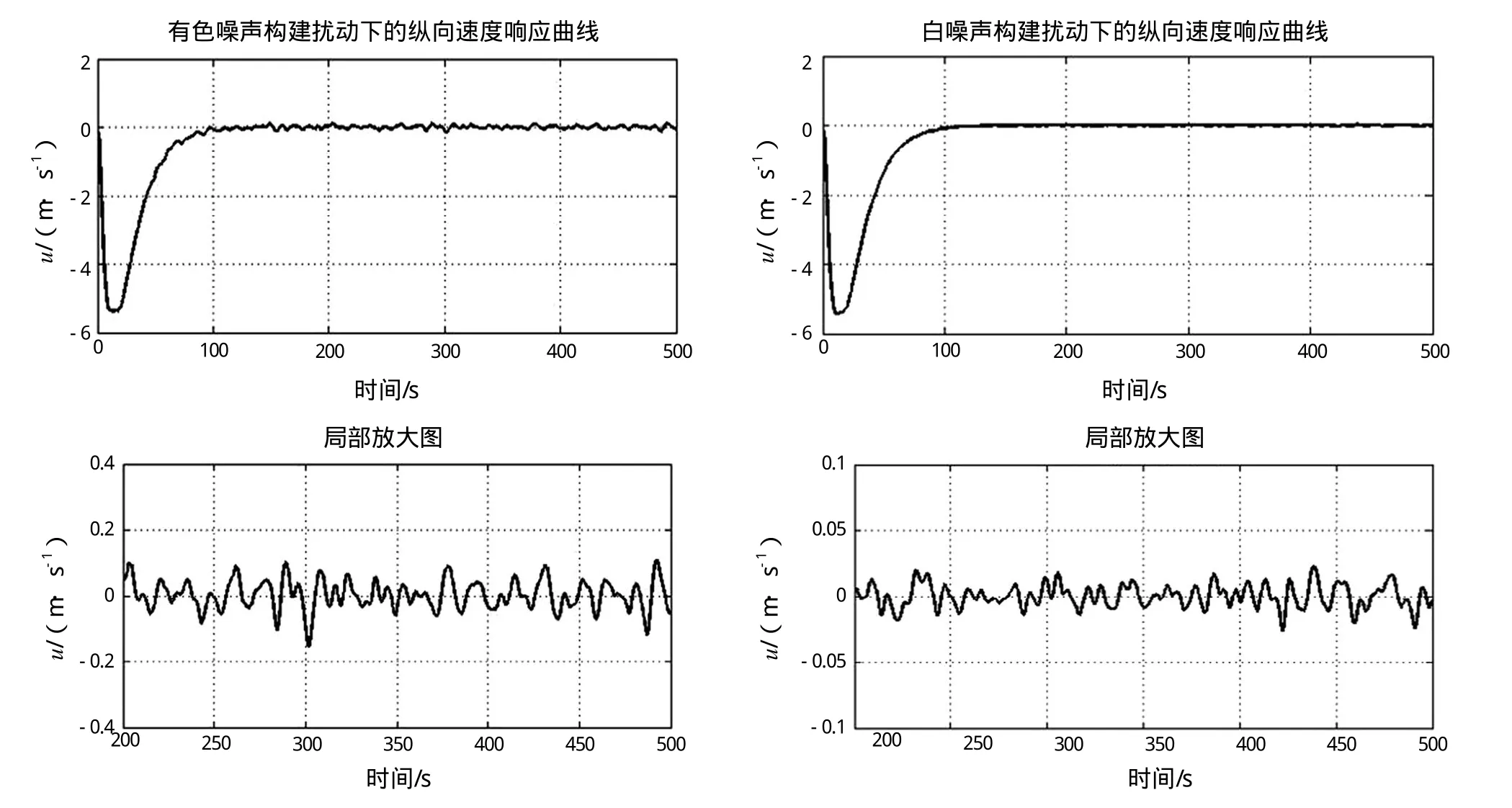
圖5 縱向速度響應(yīng)曲線
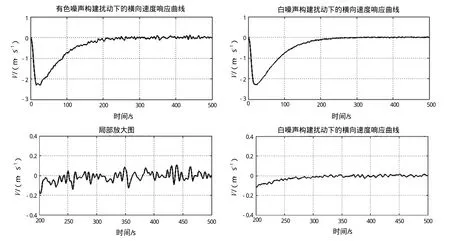
圖6 橫向速度響應(yīng)曲線
由下頁圖8可以看出,系統(tǒng)輸入控制力τu、τv和控制力矩τr的響應(yīng)曲線較光順平穩(wěn),縱向控制力τu較快收斂至零點,然后在橫向控制力τv的作用下,船舶到達(dá)期望位置并保持穩(wěn)定狀態(tài),這與船舶的位置響應(yīng)曲線(圖4)所對應(yīng)產(chǎn)生的現(xiàn)象相符。同時,在有色噪聲與高斯白噪聲分別構(gòu)建的波浪擾動下,各控制輸入量響應(yīng)曲線差別較小,只在橫向力的響應(yīng)曲線中有較為明顯的波動誤差。
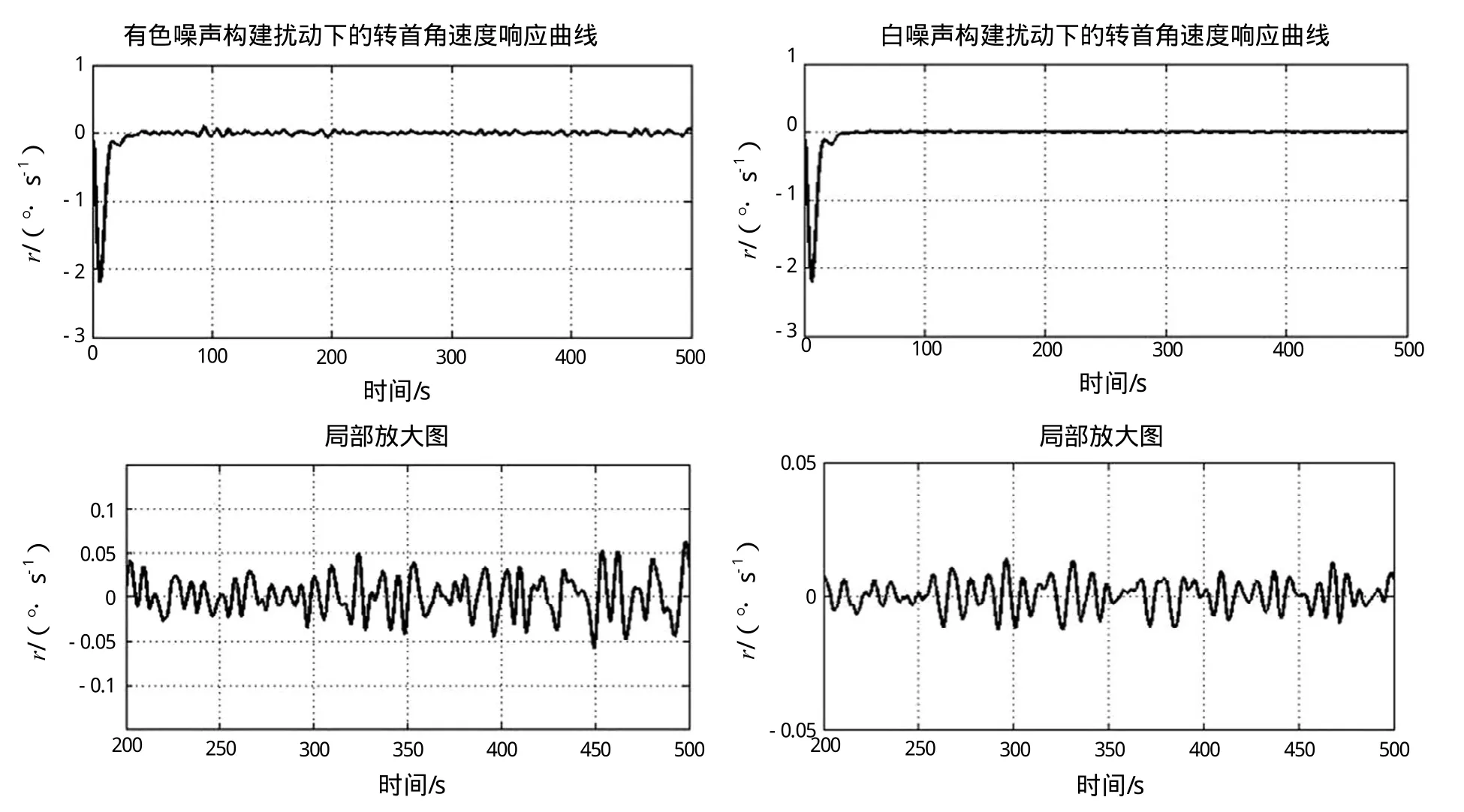
圖7 轉(zhuǎn)首角速度響應(yīng)曲線

圖8 控制輸入量 τu,τv,τr 響應(yīng)曲線
綜上所述,本文基于反步法所設(shè)計的運(yùn)動鎮(zhèn)定控制器能夠在較為貼近工程實際的有色噪聲構(gòu)建的波浪擾動下實現(xiàn)工作要求且具備強(qiáng)魯棒性,在理想化高斯白噪聲構(gòu)建的波浪擾動下則具備更穩(wěn)定的控制性能。
4 結(jié) 語
本文針對某全驅(qū)動船舶的運(yùn)動鎮(zhèn)定問題,基于反步法設(shè)計了一種運(yùn)動鎮(zhèn)定控制器。結(jié)合Lyapunov穩(wěn)定性定理證明了所設(shè)計的反饋輸出控制律全局漸進(jìn)收斂,并分別引入高斯白噪聲和更符合真實環(huán)境的有色噪聲構(gòu)建了波浪擾動模型;同時在后續(xù)設(shè)計過程中引入了低通濾波器環(huán)節(jié)進(jìn)行性能優(yōu)化,能夠較好地解決控制輸入量與速度反饋信號因過度擾動而產(chǎn)生的劇烈振蕩問題;最后通過仿真研究驗證了所設(shè)計控制器能夠克服波浪擾動,具備優(yōu)良的鎮(zhèn)定控制效果與強(qiáng)魯棒性,可以有效實現(xiàn)全驅(qū)動狀態(tài)下船舶位移與首向角的快速鎮(zhèn)定。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09