基于非線性增益遞歸滑模的船舶軌跡跟蹤動態(tài)面自適應(yīng)控制
2018-11-01 08:01:40沈智鵬張曉玲
自動化學(xué)報 2018年10期
沈智鵬 張曉玲
具有動力定位系統(tǒng)的三自由度全驅(qū)動海洋工程船舶通過對船舶推進(jìn)器的精確控制,可使船舶以一定姿態(tài)保持在海面某一固定位置或精確地跟蹤某一設(shè)定軌跡,以完成深海勘探、海底管道建設(shè)、海上石油鉆探和供給等工程領(lǐng)域作業(yè).軌跡跟蹤屬于廣義上的動力定位,軌跡跟蹤技術(shù)的理論挑戰(zhàn)和海上新興應(yīng)用需求的增長,使得相關(guān)人員對船舶軌跡控制的研究給予了極大的關(guān)注.
鑒于船舶運(yùn)動方程的非線性特性,Fossen等[1]提出的反演法可有效避免對船舶模型進(jìn)行線性化的要求,構(gòu)造中間虛擬控制量逐步回推獲得控制律,得到閉環(huán)系統(tǒng)全局指數(shù)穩(wěn)定.船舶在航行過程中不可避免地遭受來自外部環(huán)境擾動,例如風(fēng)、浪、流等的影響,反演法與其他控制方法相結(jié)合也取得了一定的研究成果.Yang等[2]采用擾動觀測器對外部環(huán)境擾動進(jìn)行估計并補(bǔ)償,結(jié)合反演法和李雅普諾夫理論,實(shí)現(xiàn)船舶軌跡跟蹤;付明玉等[3]引入自適應(yīng)與反演法結(jié)合進(jìn)行控制律設(shè)計,其中自適應(yīng)控制項實(shí)現(xiàn)擾動參數(shù)的在線更新,增強(qiáng)魯棒性,實(shí)現(xiàn)協(xié)同路徑跟蹤.而在被控對象相對階增長的高階系統(tǒng)情況下,傳統(tǒng)反演法對虛擬控制量求導(dǎo)引起的計算膨脹給控制器設(shè)計帶來不便.為解決這個問題,Swaroop等[4]首次提出動態(tài)面控制(Dynamic surface control,DSC)方法,引入一階低通濾波器避免對虛擬控制量的求導(dǎo),簡化計算,易于工程實(shí)現(xiàn);杜佳璐等[5]將動態(tài)面控制技術(shù)融合到反演法中,并設(shè)計自適應(yīng)律對未知外部環(huán)境擾動的界進(jìn)行估計,增強(qiáng)魯棒性,實(shí)現(xiàn)船舶的動力定位.
在上述研究過程中,需要已知精確的模型相關(guān)參數(shù)以確保控制性能,而實(shí)際情況下是很難實(shí)現(xiàn)的.許多新的智能控制方法,由于學(xué)習(xí)和適應(yīng)的近似能力,不需要花費(fèi)很多精力進(jìn)行系統(tǒng)建模,被廣泛應(yīng)用于各類控制問題中.Wang等[6]采用徑向基(Radial basis function,RBF)神經(jīng)網(wǎng)絡(luò)(Neural network,NN)逼近系統(tǒng)不確定項,設(shè)計神經(jīng)網(wǎng)絡(luò)自適應(yīng)動態(tài)面控制器;Xu等[7]采用最小參數(shù)學(xué)習(xí)法減少計算負(fù)擔(dān),結(jié)合動態(tài)面技術(shù),通過小增益定理證明超高速飛行器良好的跟蹤性能.劉希等[8]引入遞歸滑模解決常規(guī)動態(tài)面對低通濾波器時間常數(shù)和神經(jīng)網(wǎng)絡(luò)自適應(yīng)參數(shù)攝動脆弱的缺點(diǎn),得到閉環(huán)系統(tǒng)所有狀態(tài)半全局一致最終有界.考慮船舶模型參數(shù)未知、具有未建模動態(tài)和風(fēng)浪流等環(huán)境擾動,賈鶴鳴等[9]采用非線性迭代滑模對無人水下航行器(Unmanned underwater vehicle,UUV)進(jìn)行航跡跟蹤控制,無需對系統(tǒng)模型不確定部分和海流干擾進(jìn)行估計,避免舵的抖振、減小穩(wěn)態(tài)誤差與超調(diào);沈智鵬等[10]在此基礎(chǔ)上,引入模糊系統(tǒng)對迭代滑模參數(shù)進(jìn)行優(yōu)化,設(shè)計模糊自適應(yīng)非線性迭代滑模控制器,增強(qiáng)參數(shù)在不同海況環(huán)境下的自適應(yīng)性,實(shí)現(xiàn)更好的風(fēng)帆助航船舶航向控制;Li等[11]采用RBF神經(jīng)網(wǎng)絡(luò)逼近系統(tǒng)的不確定因素,構(gòu)造自適應(yīng)RBF神經(jīng)網(wǎng)絡(luò)控制器,實(shí)現(xiàn)船舶軌跡跟蹤;王昊等[12]將動態(tài)面技術(shù)引入單隱層(Single hidden layer,SHL)神經(jīng)網(wǎng)絡(luò)進(jìn)行控制律設(shè)計,簡化控制算法,實(shí)現(xiàn)協(xié)同路徑跟蹤;Wang等[13]采用模糊系統(tǒng)逼近系統(tǒng)不確定部分,引入Nussbaum函數(shù)解決控制方向不確定的問題,結(jié)合動態(tài)面技術(shù),實(shí)現(xiàn)領(lǐng)導(dǎo)者–跟隨者的輸出同步.
然而,常規(guī)動態(tài)面基于線性增益設(shè)置,使得當(dāng)系統(tǒng)誤差較大時,需要較大的控制量以保證控制精度,然而過大的控制量容易引起系統(tǒng)輸入飽和限制;當(dāng)系統(tǒng)誤差較小時,影響控制精度.采用“小誤差大增益,大誤差小增益”的非線性函數(shù)可解決上述矛盾,但無法得到系統(tǒng)穩(wěn)定.且常規(guī)動態(tài)面采用的低通濾波器具有一定的延遲,各子系統(tǒng)跟蹤誤差并不能代表真實(shí)的跟蹤誤差,神經(jīng)網(wǎng)絡(luò)本身也會使系統(tǒng)穩(wěn)定性變差,加劇基于子系統(tǒng)跟蹤誤差依次反推的不利性.為此采用遞歸滑模面考慮各子系統(tǒng)誤差間的相互關(guān)系,恰好也能解決引入非線性函數(shù)后對系統(tǒng)穩(wěn)定性證明的問題.孫秀霞等[14]引入一種非線性增益函數(shù),設(shè)計含有積分項的遞歸滑模面考慮各子系統(tǒng)間誤差,利用新的李雅普諾夫函數(shù)證明穩(wěn)定性,實(shí)現(xiàn)無人機(jī)航跡角跟蹤.但該方法假設(shè)模型參數(shù)攝動和外界大氣擾動總和的界已知,實(shí)際情況下很難實(shí)現(xiàn).劉希等[15]考慮不確定非線性系統(tǒng),利用神經(jīng)網(wǎng)絡(luò)在線逼近系統(tǒng)不確定項,提出一種非線性增益遞歸滑模動態(tài)面自適應(yīng)控制方法,有效解決系統(tǒng)的跟蹤控制問題.但該方法假設(shè)神經(jīng)網(wǎng)絡(luò)逼近誤差界已知,且所設(shè)計非線性增益函數(shù)為分段函數(shù),構(gòu)造略顯復(fù)雜,實(shí)際應(yīng)用具有一定的局限性,且僅針對單輸入–單輸出嚴(yán)反饋系統(tǒng)進(jìn)行控制器設(shè)計,故該方法不能直接用于多輸入–多輸出的船舶軌跡跟蹤控制問題.
根據(jù)以上研究結(jié)果,在文獻(xiàn)[15]基礎(chǔ)上,針對多輸入–多輸出三自由度全驅(qū)動船舶的軌跡跟蹤控制問題,當(dāng)存在模型不確定和未知外部環(huán)境擾動時,引入一種新的簡單非線性增益函數(shù)和遞歸滑模面,結(jié)合神經(jīng)網(wǎng)絡(luò)、動態(tài)面技術(shù)和自適應(yīng)魯棒反演控制,設(shè)計出一種基于非線性增益遞歸滑模的船舶軌跡跟蹤動態(tài)面自適應(yīng)控制方法.該方法綜合考慮船舶位置和速度誤差之間關(guān)系設(shè)計遞歸滑模面,引入神經(jīng)網(wǎng)絡(luò)對船舶模型不確定部分進(jìn)行逼近,設(shè)計帶σ-修正泄露項的自適應(yīng)律[16]對神經(jīng)網(wǎng)絡(luò)逼近誤差與外界環(huán)境擾動總和的界進(jìn)行估計,并應(yīng)用一種非線性增益函數(shù)構(gòu)造動態(tài)面控制律,選取李雅普諾夫函數(shù)可證明該控制律能夠保證軌跡跟蹤閉環(huán)系統(tǒng)內(nèi)所有信號的一致最終有界性.最后應(yīng)用一艘供給船進(jìn)行控制仿真研究,驗(yàn)證所設(shè)計控制器的有效性.
1 問題描述
假設(shè)船舶左右對稱,考慮前進(jìn)、橫漂和艏搖的三自由度軌跡跟蹤船舶軌跡跟蹤數(shù)學(xué)模型可表示為

其中,η=[x,y,ψ]T為船舶在大地參考坐標(biāo)系下的實(shí)際位置(x,y)和艏搖角ψ組成的向量;υ=[u,ν,r]T為船舶在附體坐標(biāo)系下前進(jìn)速度u、橫漂速度ν和艏搖角速度r組成的向量;τ=[τ1,τ2,τ3]T為船舶推進(jìn)器控制輸入前進(jìn)力τ1、橫漂力τ2以及艏搖力矩τ3組成的控制向量;d=[d1,d2,d3]T為船舶在附體坐標(biāo)系下受風(fēng)、浪、流等引起的橫向干擾力d1、縱向干擾力d2和艏向干擾力矩d3組成的未知外部環(huán)境擾動向量;J(ψ)為坐標(biāo)系轉(zhuǎn)換矩陣,其表達(dá)式為
且具備J?1(ψ)=JT(ψ)和kJ(ψ)k的特性;M為船舶重量慣性和水動力附加慣性組成的矩陣;C(υ)為科氏向心矩陣;D為線性水動力阻尼參數(shù)矩陣;?f=[?f,1,?f,2,?f,3]T為船舶模型不確定部分.
假設(shè)1.船舶的參考軌跡ηd是光滑可導(dǎo)且有界的,其一階導(dǎo)數(shù)和二階導(dǎo)數(shù)亦是有界的.
假設(shè)2.軌跡跟蹤船舶數(shù)學(xué)模型中,船舶重量慣性和水動力附加慣性矩陣M已知且為對角陣、科氏向心矩陣C(υ)和阻尼矩陣D已知;船舶模型不確定部分?f未知但有界;外部環(huán)境擾動d未知但有界.
本文的控制目標(biāo)是針對船舶軌跡跟蹤數(shù)學(xué)模型(1)和模型(2),在滿足假設(shè)1和假設(shè)2的情況下,考慮船舶存在參數(shù)不確定部分且遭受完全未知的有界時變環(huán)境擾動,設(shè)計控制律τ,使船舶可以沿期望軌跡航行,并保證閉環(huán)系統(tǒng)所有信號一致最終有界,實(shí)現(xiàn)船舶軌跡跟蹤.
2 船舶軌跡跟蹤控制器設(shè)計
考慮軌跡跟蹤船舶存在模型不確定部分和外部環(huán)境擾動,引入一種新的簡單非線性增益函數(shù)和遞歸滑模面,結(jié)合神經(jīng)網(wǎng)絡(luò)、動態(tài)面技術(shù)和自適應(yīng)魯棒反演技術(shù),設(shè)計非線性增益遞歸滑模的船舶軌跡跟蹤動態(tài)面自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制器.
2.1 一種非線性增益函數(shù)
為解決常規(guī)動態(tài)面控制基于線性增益設(shè)置使得系統(tǒng)的控制精度與動態(tài)品質(zhì)之間存在矛盾的問題,設(shè)計一種非線性增益函數(shù),其表達(dá)式為

其中,a>0.該函數(shù)具有“小誤差大增益,大誤差小增益”的優(yōu)良性質(zhì),可有效解決上述矛盾.在常規(guī)動態(tài)面方法中引入非線性增益函數(shù)對李雅普諾夫函數(shù)的穩(wěn)定性證明增加了難度,這在后續(xù)采用遞歸滑模后將得到解決.
性質(zhì) 1.函數(shù)g(x)關(guān)于自變量x嚴(yán)格單調(diào)遞增,為避免x=0時斜率過大的問題,設(shè)置其導(dǎo)數(shù)
性質(zhì)2.定義

則對于任意的x,有

成立.
性質(zhì)3.為避免x=0時除數(shù)為零的情況,定義
則對于任意的x,有
成立.
當(dāng)a取不同值時,函數(shù)l(x)圖像如圖1所示.
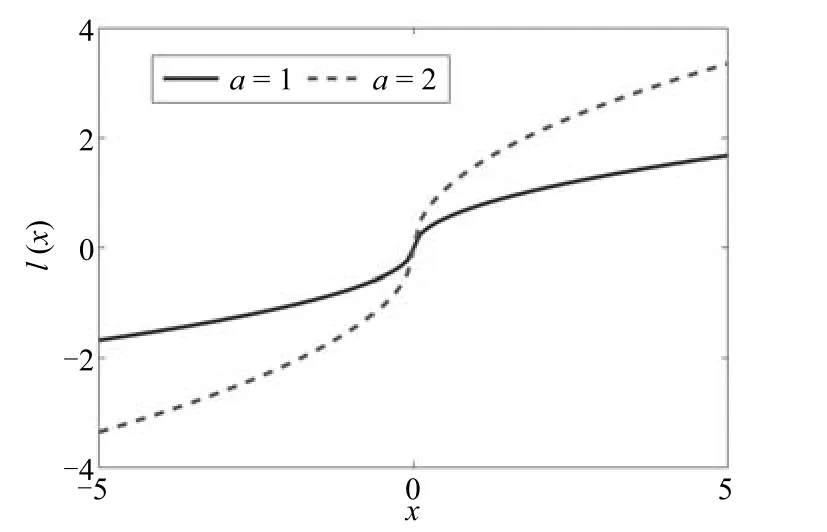
圖1 函數(shù)l(x)曲線圖Fig.1 The curves of functionl(x)
可見,在x較小時,l(x)變化增益較大,而x較大時,l(x)變化增益較小,即“小誤差大增益,大誤差小增益”.
2.2 控制器設(shè)計
步驟1.考慮船舶位置誤差向量,定義第一個滑模面向量s1∈R3

設(shè)計υ的虛擬控制向量α1∈R3為

根據(jù)Swaroop等[4]提出的動態(tài)面方法,引入一個新的狀態(tài)向量的一階低通濾波輸出,數(shù)學(xué)表達(dá)式為

其中,T為濾波器時間常數(shù).用濾波器的代替項,避免傳統(tǒng)反演法中對虛擬控制向量直接求導(dǎo)產(chǎn)生的計算復(fù)雜問題,易于工程實(shí)現(xiàn).

步驟2.根據(jù)船舶速度誤差向量和步驟1得到的位置誤差向量,綜合考慮兩者誤差間的相互關(guān)系,定義第二個遞歸滑模面向量為

其中,C1∈R3×3為設(shè)計的正定參數(shù)對角陣.
考慮到三自由度全驅(qū)動軌跡跟蹤船舶模型存在參數(shù)不確定部分?f,式(2)是一個三維狀態(tài)方程組,故引進(jìn)3個RBF神經(jīng)網(wǎng)絡(luò)[17]對其進(jìn)行逼近.

假設(shè)3.對于所有的,神經(jīng)網(wǎng)絡(luò)理想權(quán)值和逼近誤差有界,即存在正的常數(shù)和有界函數(shù),使得和成立;再由假設(shè)2,則對于軌跡跟蹤船舶外部環(huán)境擾動d和RBF神經(jīng)網(wǎng)絡(luò)逼近誤差每一分量來說,存在有界函數(shù)δi>0,使,i=1,2,3,即神經(jīng)網(wǎng)絡(luò)逼近誤差和外部環(huán)境擾動d的界向量可表示為.
設(shè)計船舶軌跡跟蹤狀態(tài)反饋控制律為

設(shè)計權(quán)值向量自適應(yīng)律為

對神經(jīng)網(wǎng)絡(luò)逼近誤差和外部環(huán)境擾動組成的界向量δ,設(shè)計其估計值的自適應(yīng)律為

注1.本文為多輸入–多輸出的船舶軌跡跟蹤控制問題,定義代替常規(guī)動態(tài)面的用以解決穩(wěn)定性證明的難題;對式(9)引入具有“小誤差大增益,大誤差小增益”特性的非線性項提高系統(tǒng)控制性能.
注2.在控制律式(14)中,采用具有非線性增益功能的代替,有效改善系統(tǒng)控制精度與動態(tài)品質(zhì)之間的矛盾;遞歸滑模面項解決常規(guī)動態(tài)面方法引入非線性增益函數(shù)后對李雅普諾夫函數(shù)穩(wěn)定性證明的難題;項用于消除耦合項;雙曲正切函數(shù)有效消除滑模抖振現(xiàn)象.
注3.神經(jīng)網(wǎng)絡(luò)權(quán)值的自適應(yīng)律式(15)和對神經(jīng)網(wǎng)絡(luò)逼近誤差及外部環(huán)境擾動的界的自適應(yīng)律式(16)中,引入遞歸滑模函數(shù)s2的非線性增益函數(shù),有效防止神經(jīng)網(wǎng)絡(luò)及自適應(yīng)的過度學(xué)習(xí),提高系統(tǒng)穩(wěn)定性.
注4.在設(shè)計狀態(tài)反饋控制器的過程中,文獻(xiàn)[15]沒有考慮外界環(huán)境擾動,用神經(jīng)網(wǎng)絡(luò)逼近系統(tǒng)的不確定性;且假設(shè)逼近誤差界已知,用逼近誤差的界構(gòu)造魯棒項對逼近誤差進(jìn)行補(bǔ)償.考慮實(shí)際作業(yè)船舶不可避免地遭受未知外界環(huán)境擾動,且假設(shè)逼近誤差界已知的情況不容易滿足,本文在設(shè)計船舶軌跡跟蹤控制器的過程中,用神經(jīng)網(wǎng)絡(luò)逼近模型不確定部分,逼近誤差和外界環(huán)境擾動采用基于σ-修正泄露項的自適應(yīng)律對其界進(jìn)行估計補(bǔ)償,提高船舶軌跡跟蹤精確性,增強(qiáng)魯棒性.
2.3 穩(wěn)定性分析
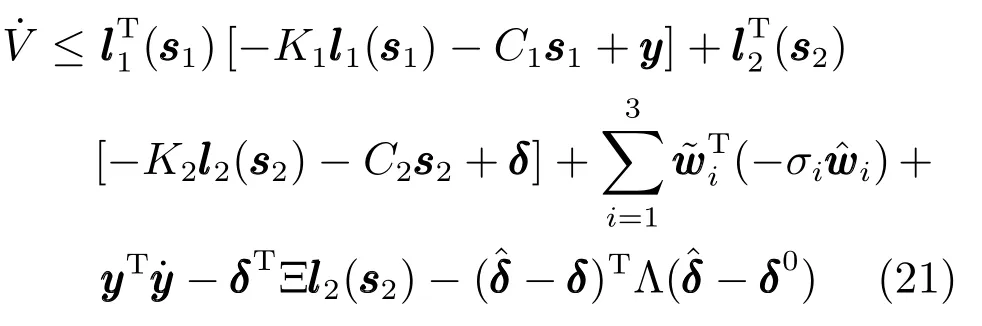
選擇系統(tǒng)李雅普諾夫函數(shù)為
對式(17)兩邊關(guān)于時間求導(dǎo),可得
根據(jù)以上論述,考慮式(15)和式(16),則式(18)變?yōu)?/p>
考慮不等式
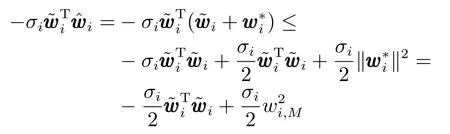
及不等式
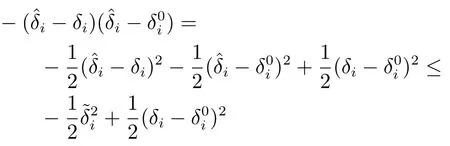
其中,i=1,2,3;且根據(jù)雙曲正切函數(shù)的性質(zhì),對于ε>0,a∈R,有 0≤|a|?atanh(a/ε)≤0.2785ε,故
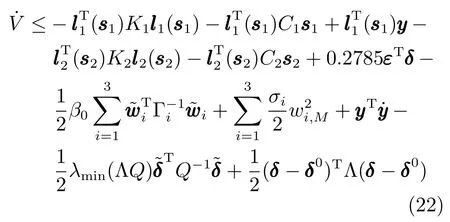
根據(jù)非線性增益函數(shù)的性質(zhì),有如下不等式:
其中,a1為正常數(shù),i=1,2.

其中,a2為正常數(shù).
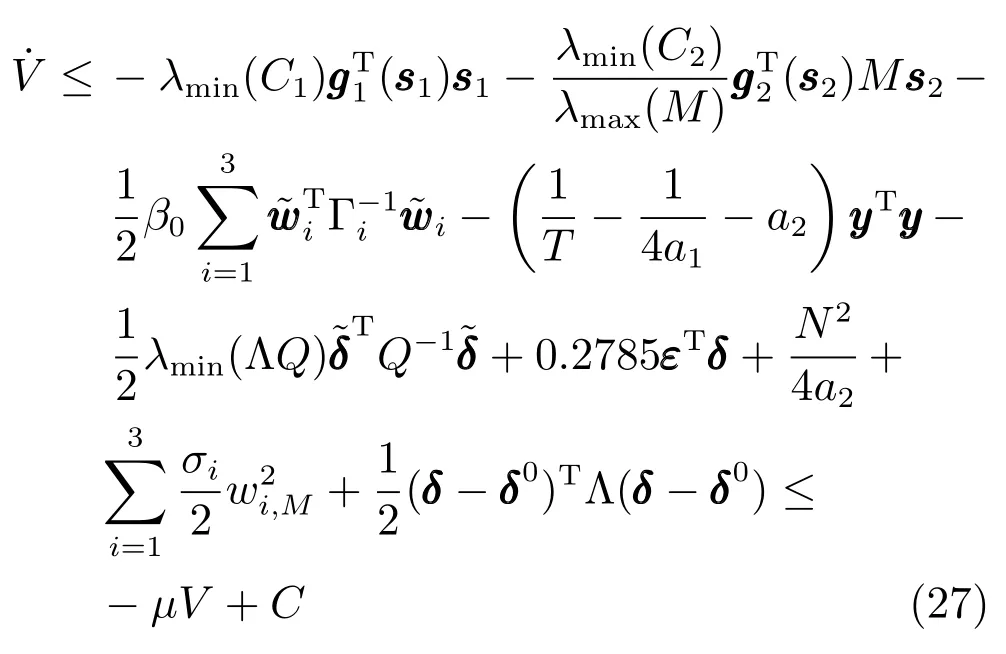
按照上述分析,總結(jié)定理如下:
定理1.針對三自由度軌跡跟蹤船舶的非線性運(yùn)動學(xué)和動力學(xué)方程,考慮船舶存在模型不確定部分且遭受未知外部環(huán)境擾動,在假設(shè)1~3成立的情況下,構(gòu)造一種新型非線性增益函數(shù)式(3),引入神經(jīng)網(wǎng)絡(luò)對系統(tǒng)未知不確定部分進(jìn)行逼近,設(shè)計神經(jīng)網(wǎng)絡(luò)權(quán)值向量自適應(yīng)律式(15),采用σ-修正泄露項的自適應(yīng)律式(16)對神經(jīng)網(wǎng)絡(luò)逼近誤差和外界環(huán)境擾動的界進(jìn)行估計,最終在非線性遞歸動態(tài)面自適應(yīng)魯棒控制律式(14)的作用下,得到閉環(huán)系統(tǒng)所有信號的一致最終有界性.適當(dāng)對設(shè)計參數(shù)K1,K2,和濾波器時間常數(shù)T進(jìn)行調(diào)整選擇,可以使船舶實(shí)現(xiàn)高精度的軌跡跟蹤.
證明.解不等式(27),可得

故可知,V(t)一致最終有界;再由式(17)可得系統(tǒng)中的信號一致最終有界;從而由式(7),(9)及(11)可知有界;由和s1的有界性可知η是有界的;由和δ的有界性可知也是有界的.從而得到船舶軌跡跟蹤閉環(huán)系統(tǒng)內(nèi)所有信號的一致最終有界性.

3 仿真研究
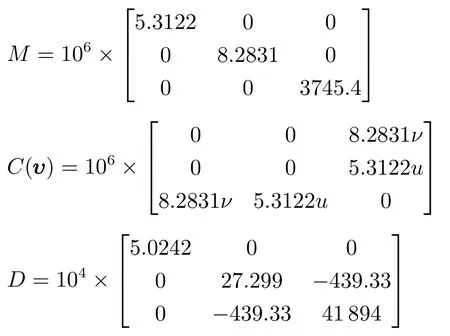
為驗(yàn)證所設(shè)計控制律的有效性,以文獻(xiàn)[18]中一艘供給船作為仿真對象進(jìn)行仿真試驗(yàn).此船長度為76.2m,質(zhì)量為4.591×106kg,船舶重量慣性和水動力附加慣性組成的矩陣、科氏向心矩陣、線性水動力阻尼參數(shù)矩陣分別為
船舶模型不確定部分為
在仿真中,選擇船舶航行期望軌跡為
外部環(huán)境擾動為

船舶初始位置和速度狀態(tài)信息為
在相同海況下,采用本文算法與文獻(xiàn)[6]基于神經(jīng)網(wǎng)絡(luò)的常規(guī)動態(tài)面算法對船舶軌跡跟蹤性能進(jìn)行仿真比較,系統(tǒng)的初始條件相同,仿真結(jié)果如圖2~8所示.
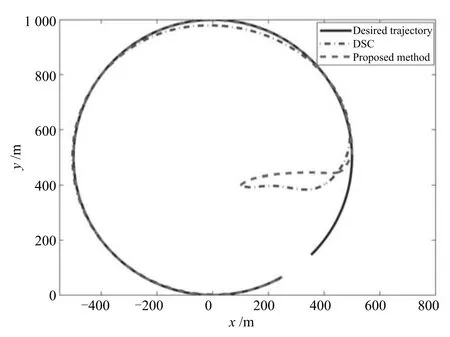
圖2 外部環(huán)境擾動下船舶的期望軌跡和實(shí)際軌跡Fig.2 Desired trajectory and actual trajectory under external environment disturbances
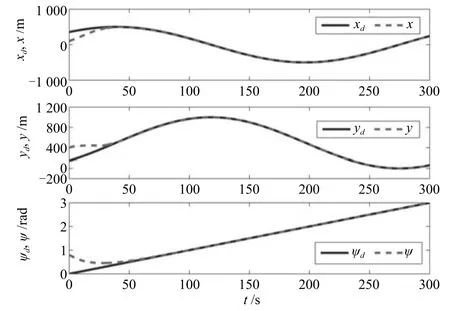
圖3 外部環(huán)境擾動下期望軌跡η d=[xd,yd,ψd]T和本文算法實(shí)際軌跡η =[x,y,ψ]T歷時曲線Fig.3Curves of desired trajectoryη d=[xd,yd,ψd]Tand actual trajectoryη =[x,y,ψ]Twith proposed controller versus time under external environment disturbances
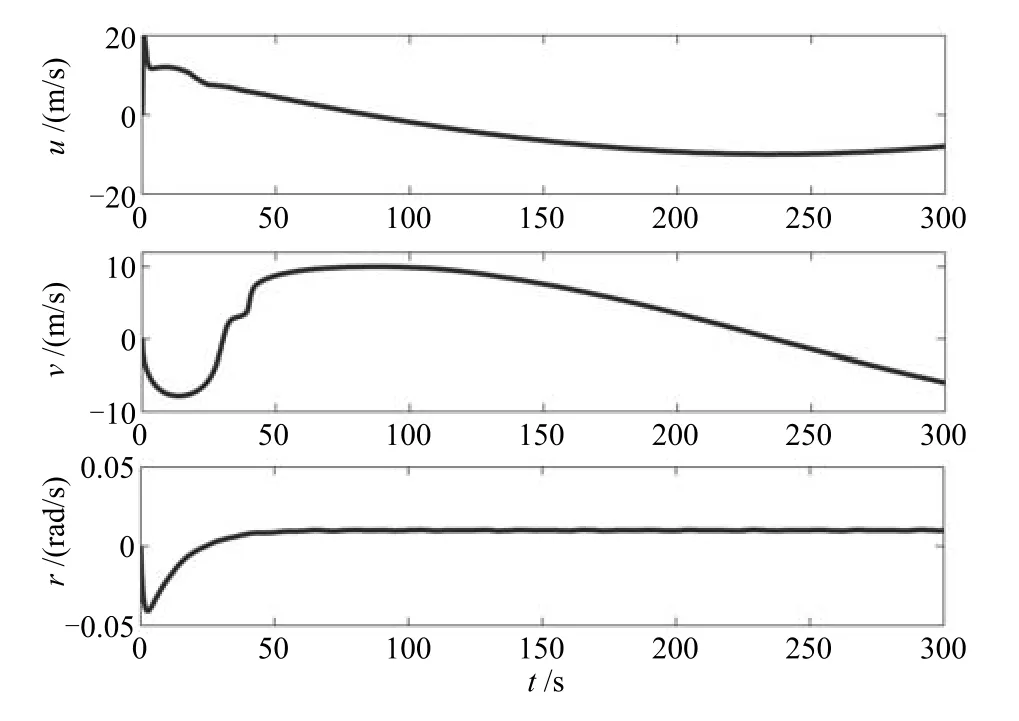
圖4 外部環(huán)境擾動下前進(jìn)速度u、橫移速度ν和艏搖角速度r歷時曲線Fig.4 Curves of surge velocityu,sway velocityνand yaw raterversus time under external environment disturbances
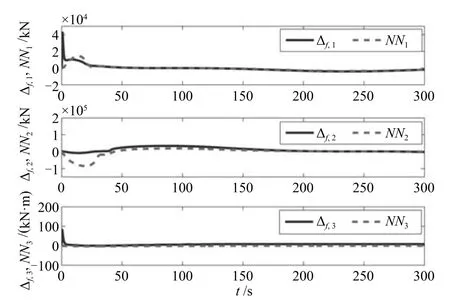
圖5 神經(jīng)網(wǎng)絡(luò)逼近歷時曲線Fig.5 Curves of learning behavior of neural networks
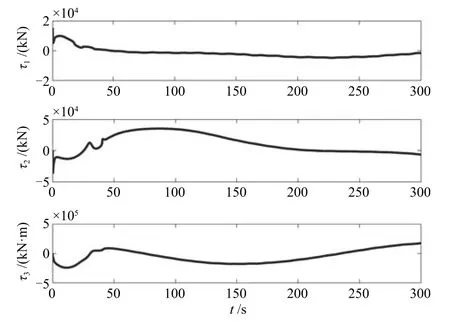
圖6 控制器輸出Fig.6 Curves of controller outputs
圖2是相同海況下,大地參考坐標(biāo)系內(nèi)船舶的期望軌跡和本文設(shè)計控制律及常規(guī)動態(tài)面設(shè)計控制律驅(qū)動船舶航行的實(shí)際軌跡,表明在模型不確定和未知外部環(huán)境擾動存在的情況下,本文設(shè)計控制律相較于常規(guī)動態(tài)面而言,能夠較快地跟蹤上期望軌跡,且跟蹤精度較高;圖3是大地參考坐標(biāo)系下船舶的期望位置、期望艏搖角和本文設(shè)計控制律驅(qū)動船舶航行的實(shí)際位置、實(shí)際艏搖角的歷時曲線,表明船舶在大約50s左右即能大概跟蹤上期望軌跡;圖4是前進(jìn)速度u、橫漂速度ν和艏搖角速度r的歷時曲線;圖5是系統(tǒng)不確定部分?f,1,?f,2,?f,3及RBF神經(jīng)網(wǎng)絡(luò)的逼近值NN1,NN2,NN3的歷時曲線,表明在50s以后神經(jīng)網(wǎng)絡(luò)基本跟蹤上所要逼近的不確定項;圖6是本文設(shè)計控制器輸出,可以看出控制律光滑合理;圖7是外部環(huán)境擾動和逼近誤差的界δ1,δ2,δ3及其估計值歷時曲線,且放大從20s到300s的跟蹤曲線,可以看出所設(shè)計修正泄漏項的自適應(yīng)律參數(shù)選取合適,能夠?qū)ν獠凯h(huán)境擾動和逼近誤差的界進(jìn)行估計;結(jié)合圖5神經(jīng)網(wǎng)絡(luò)逼近效果,可以看出在神經(jīng)網(wǎng)絡(luò)跟蹤有誤差的情況下,自適應(yīng)律也能夠進(jìn)行很好的估計從而保證船舶的高精度航行;圖8是相同海況下本文算法與常規(guī)動態(tài)面算法跟蹤性能比較,其中表示位置誤差范數(shù),可以看出,本文算法跟蹤性能較常規(guī)動態(tài)面雖然前30s稍慢,但30s后明顯優(yōu)于常規(guī)動態(tài)面,跟蹤誤差衰減快;且基于“小誤差大增益,大誤差小增益”的本文算法考慮遞歸滑模在一定程度上削弱神經(jīng)網(wǎng)絡(luò)造成的誤差,45s后基本跟蹤上期望軌跡,穩(wěn)態(tài)誤差小,總體上性能優(yōu)于常規(guī)動態(tài)面.
4 結(jié)論
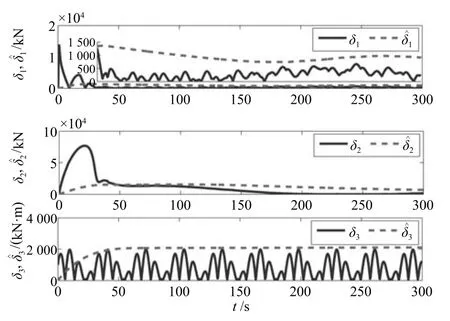
圖7 外部環(huán)境擾動和逼近誤差的界δ1,δ2,δ3及其估計值?δ1,?δ2,?δ3歷時曲線Fig.7 Curves of the bounds of external environment disturbances and approximation errorsδ1,δ2,δ3and their estimations?δ1,?δ2,?δ3verse time with proposed controller
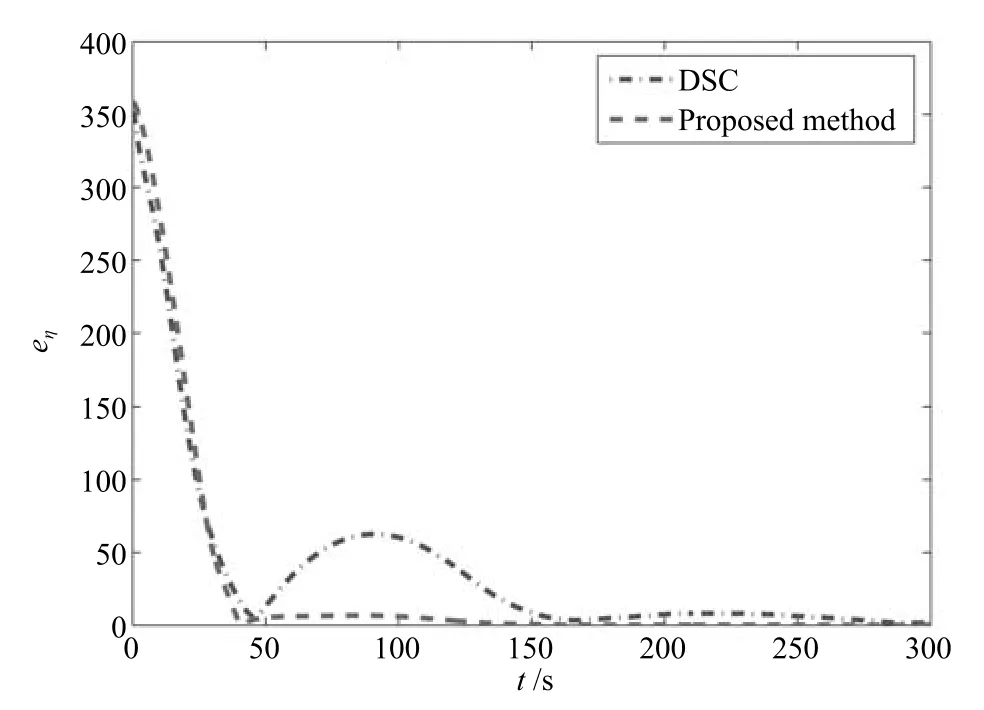
圖8 相同海況下本文算法與常規(guī)動態(tài)面算法跟蹤性能比較Fig.8 Comparison of tracking errors under the same sea conditions between the proposed method and the dynamic surface control method
考慮三自由度全驅(qū)動船舶具有模型不確定部分且遭受未知外部環(huán)境擾動,引入非線性增益函數(shù)和遞歸滑模面,結(jié)合神經(jīng)網(wǎng)絡(luò)、動態(tài)面技術(shù)和自適應(yīng)魯棒反演控制,設(shè)計出一種基于非線性增益遞歸滑模的船舶軌跡跟蹤動態(tài)面自適應(yīng)控制器.非線性函數(shù)的引入和遞歸滑模面的設(shè)計,能有效解決常規(guī)動態(tài)面方法對低通濾波器時間常數(shù)和神經(jīng)網(wǎng)絡(luò)自適應(yīng)參數(shù)攝動脆弱的缺點(diǎn).基于李雅普諾夫函數(shù)證明了該控制律可實(shí)現(xiàn)船舶的高精度軌跡跟蹤,并保證系統(tǒng)內(nèi)所有信號的一致最終有界性.最后以一艘供給船舶進(jìn)行仿真試驗(yàn),驗(yàn)證了所設(shè)計控制器的有效性,仿真結(jié)果表明,采用非線性增益遞歸滑模的船舶軌跡跟蹤動態(tài)面自適應(yīng)控制方法,可提高船舶軌跡跟蹤速度和控制精度,且控制力和力矩光滑合理,更加符合船舶的實(shí)際操作要求,在工程實(shí)際中具有一定參考價值.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09