模式失配條件下連續時間控制系統的零控脫靶量估計誤差分布
2018-11-01 08:01:34項盛文范紅旗付強
自動化學報 2018年10期
關鍵詞:模型
項盛文 范紅旗 付強
海灣戰爭以后,戰術彈道導彈(Tactical ballistic missiles,TBM)逐漸成為防空系統的攔截對象,而具有潛在機動能力的TBM 的出現,則給現有防空系統提出嚴峻的挑戰.當前,高速大機動目標攔截問題引起了國內外各研究團隊的廣泛關注,其中最具代表的是以色列的Shinar團隊[1?4].此類目標攔截的最大挑戰在于它要求特別小的脫靶量(Miss distance,MD)甚至是直接碰撞.對于該問題,由于導彈加速度飽和、非高斯噪聲以及系統的非線性,確定性等價原理[5]已不再適用.然而,當導彈和目標的相對狀態滿足可觀測性條件時,部分分離定理仍然成立,此時估計器仍可獨立于導引律進行設計[6].
在估計器給定后,建立零控脫靶量(Zero-effort miss distance,ZEM)的估計誤差模型便具有重要意義.一方面,ZEM是導引律中的一項關鍵輸入參數,不同導引律間的區別僅在于不同的ZEM 計算方式.因此,ZEM的估計精度將直接影響制導性能,合適的ZEM估計誤差模型可以有效指導制導系統的設計.另一方面,作為評價高度大機動目標攔截性能的重要指標,脫靶量的解析計算方法中需要用到ZEM的估計誤差模型[7?10].
目前,在給定系統動態模型、估計器、控制策略、以及具體的擾動和噪聲模型后,ZEM 的估計誤差分布主要通過大量蒙特卡洛仿真得到.然而,這種后驗方法在控制系統設計階段并不十分適用.Moldavskaya等[11]提出了一種求解ZEM 估計誤差分布的解析方法.采用成形濾波器技術近似目標加速度指令,近似的指令由白噪聲通過一個一階線性系統后得到,且與原指令具有相同的自相關函數.假定初始的估計誤差為零,測量噪聲和狀態噪聲為互相獨立的零均值高斯白噪聲,則得出ZEM 的估計誤差服從零均值高斯分布,其中狀態估計誤差的方差矩陣滿足Riccati方程.
在末制導系統中,由于系統誤差、觀測噪聲等不確定因素以及不完全的狀態觀測,估計器需同時扮演觀測器和濾波器的角色,即要求其同時兼顧未知狀態重建及測量噪聲濾波這兩方面的性能,但使用固定帶寬的成形濾波器難以同時兼顧估計精度和響應速度.相關的研究工作表明,組合使用獨立模式辨識器和一個低帶寬高精度估計器更適合高速大機動目標的攔截問題,可顯著提升制導性能[12?14].實際上,對于高速大機動目標攔截,雷達和光電導引頭能夠觀測到目標的特征信息,這些特征為模式辨識器的設計提供了額外的信息且可改善系統對目標機動的響應速度[15?18].Fan等在引入獨立模式辨識器的基礎上,分析了狀態估計的誤差特性[19].考慮到ZEM對大機動目標攔截的重要意義,本文在此基礎上推導模式失配條件下ZEM的估計誤差分布.
1 問題描述
1.1 系統運動模型
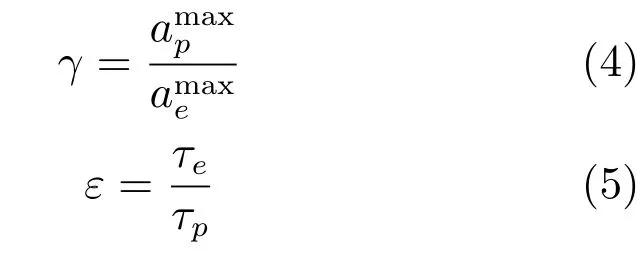
與大多數機動目標攔截文獻類似[7?11,20],本文僅考慮一彈一目的平面攔截情形.如圖1所示,用P和E分別表示導彈(追方)和目標(逃方),并作如下假設[11,19?21]:
1)P和E的控制動態可用一階轉移函數來近似,相應的時間常數分別為τp和τe;
2)P和E的速度是恒定的,分別用Vp和Ve表示;
3)P和E的橫向加速度有界,其最大橫向加速度分別用表示.
在圖1中,X軸沿彈目初始視線方向;Y垂直于X軸;(xp,yp)和(xe,ye)分別為P和E的當前坐標;φi,i=p,e分別是P和E的偏航角,它表示速度矢量和X軸的夾角.假設偏航角滿足(sinφp=φp,sinφe=π ? φe),則彈目運動軌跡可以沿著初始視線進行線性化.假定接近速度恒定,起始時刻t0=0s,給定彈目起始距離r0后,攔截的終止時刻滿足:

剩余飛行時間定義為tgo=tf?t.
定義狀態矢量x= [x1,x2,x3,x4]T=[y,y˙,aey,apy]T.基于上述三條假定,整個攔截過程的時間t∈[0,tf],且具有下述線性動態模型:
其中,x1=ye?yp為P和E之間沿Y軸的相對距離;x2為相對的橫向速度;aiy,ui,i=p,e分別為i的橫向加速度和加速度指令且滿足:

定義
其中,γ稱為機動過載比,ε通常稱為敏捷系數.為了保證較好的攔截精度,傳統最優控制框架下的導引律如OGL(Optimal guidance law)通常需要過載優勢滿足γ>3,比例導引和增廣比例導引則需要4到5倍的過載優勢,本文面向TBM攔截應用,考慮過載比γ<2.5的大機動目標且ε≈1.
圖1 平面攔截幾何Fig.1 Planer interception geometry
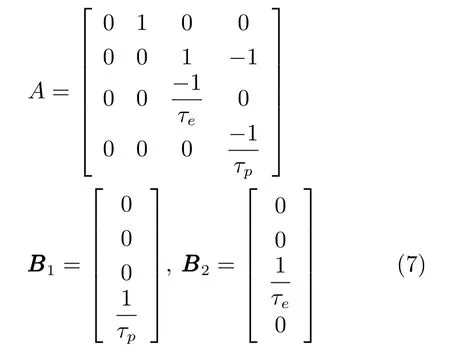
將動態模型寫成矢量形式

其中
對狀態方程(6)采用終端投影變換

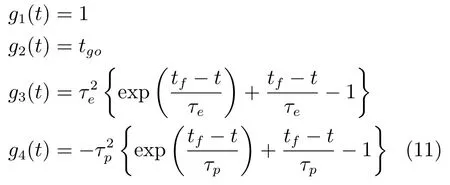
則可將平面攔截問題轉換為一個標量問題.系統的新狀態變量為零控脫靶量z(t),而系統的脫靶量則為終止時刻tf的z(t),即z(tf).式(8)中,D=[1,0,0,0]T;Φ(tf,t)為滿足齊次方程的狀態轉移矩陣,求解得到:

因此,可將零控脫靶量z(t)表示為

1.2 馬爾科夫跳變的加速度指令模型
與采用成形濾波器不同,本文引入一個獨立的模式辨識器,采用馬爾科夫跳變模型來描述目標的橫向加速度控制指令:

如圖2所示,這里將目標橫向加速度指令所在的控制空間量化為一系列離散點構成的模式集.假定:ue(t)在這些點之間跳變;m(t)為離散化的目標橫向加速度指令,即目標的運動模式;w(t)為量化誤差,假定其為零均值的高斯白噪聲,功率譜密度為sw.有關機動目標跟蹤模型集的設計方法可以參見文獻[15,22?24].
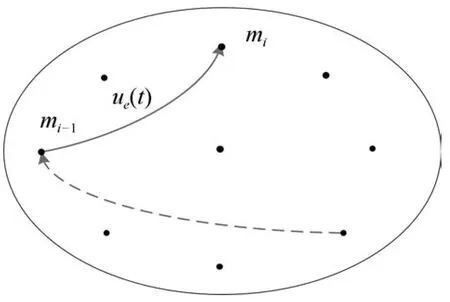
圖2 目標橫向加速度指令模型集Fig.2 Mode-set of the evader's lateral acceleration command
不失一般性,假定[0,tf]內目標只發生一次模式切換,令tsw表示模式切換時刻,m1,m2分別表示模式切換前后目標的運動模式量,則m(t)可表示為

其中,u(t)為階躍函數,定義為
1.3 系統觀測模型
與文獻[19]類似,本文采用的觀測模型為

其中觀測矩陣
觀測噪聲v(t)為零均值的高斯白噪聲,其協方差矩陣為R(t).
2 ZEM估計誤差模型的推導
考慮如圖3所示的一種典型的制導系統結構.圖3中,獨立的模式辨識器為估計器和導引律的設計提供目標的運動模式信息.文獻[14]基于該架構給出的導引律為基于邏輯的聯合估計導引律.本文在這個框架下推導模式失配條件下ZEM的估計誤差分布形式.
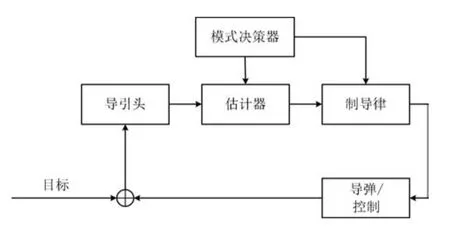
圖3 一種典型的制導系統結構Fig.3 A typical structure of guidance system
在此,我們對模式辨識器的行為作如下假定:目標運動模式切換后經過?t的時間延遲,模式辨識器可給出正確的模式估計結果.目標模式切換和模式辨識器的模式決策過程如圖4所示.
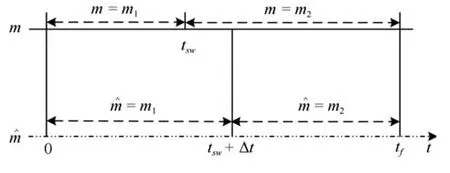
圖4 模式切換和模式辨識器輸出示意圖Fig.4 Diagram of mode switch and decision-maker output
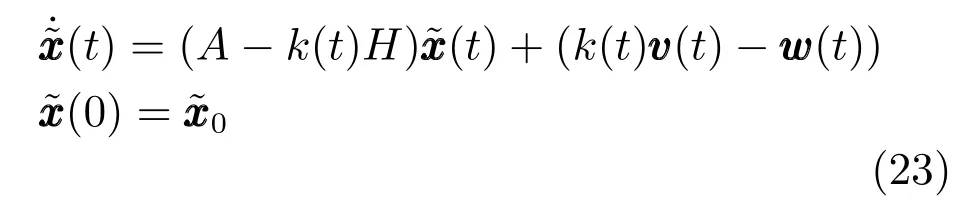
將式(12)的目標加速度指令代入系統狀態方程,可以得到:

估計器采用Kalman濾波器,由圖4可知估計器的動態方程為

下面分三種情況討論:
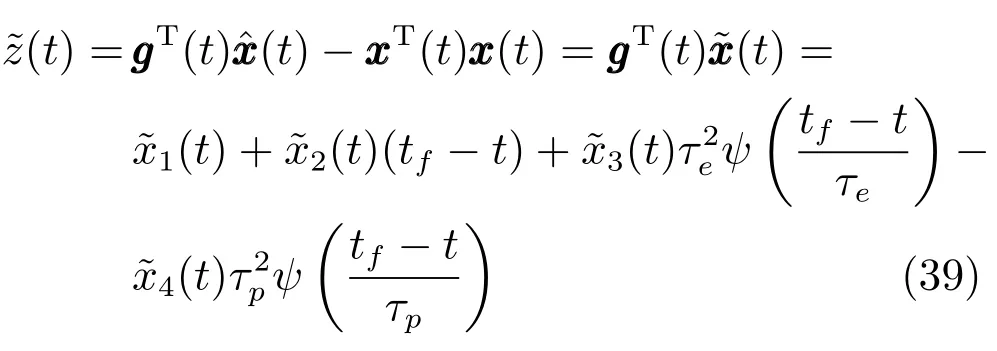
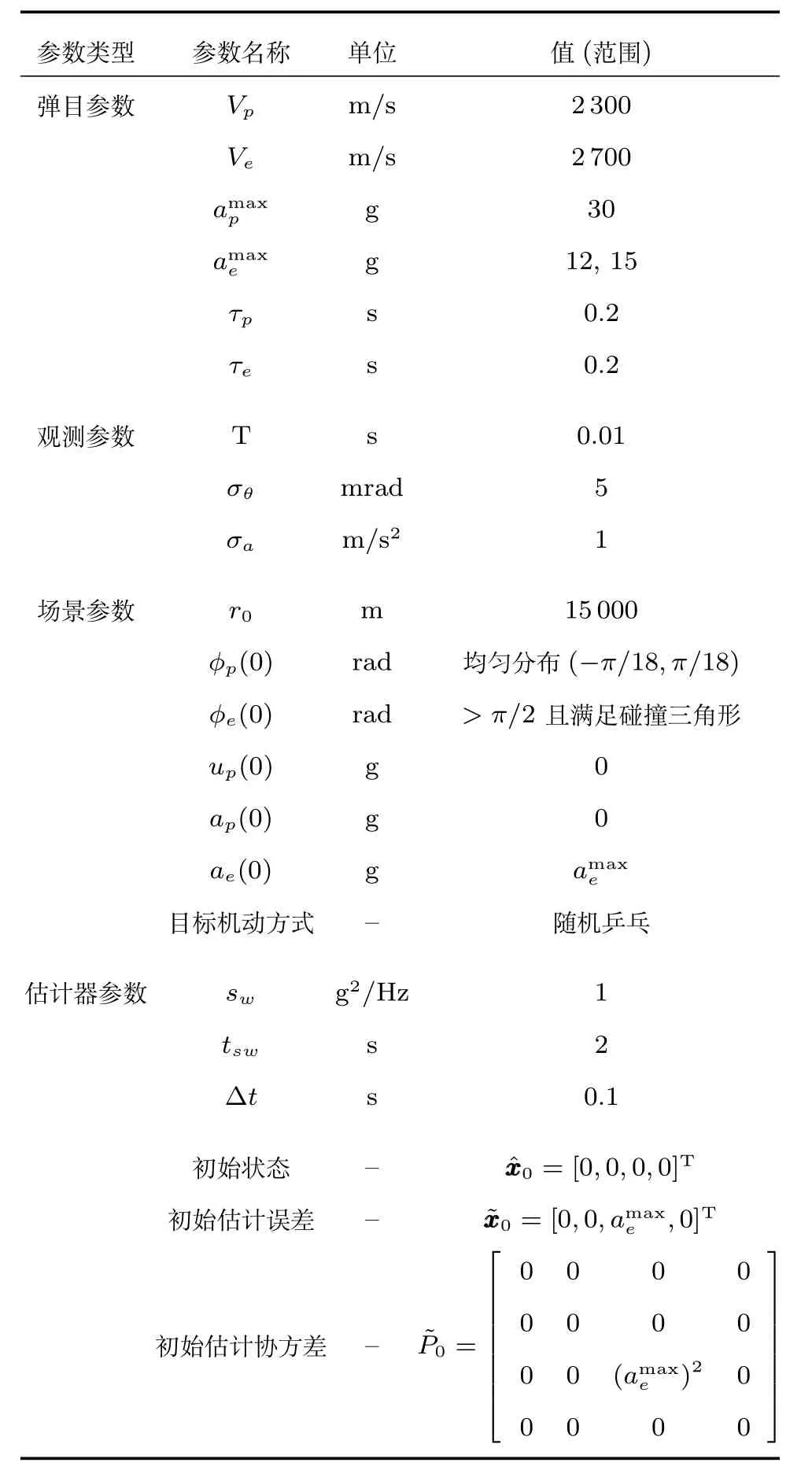
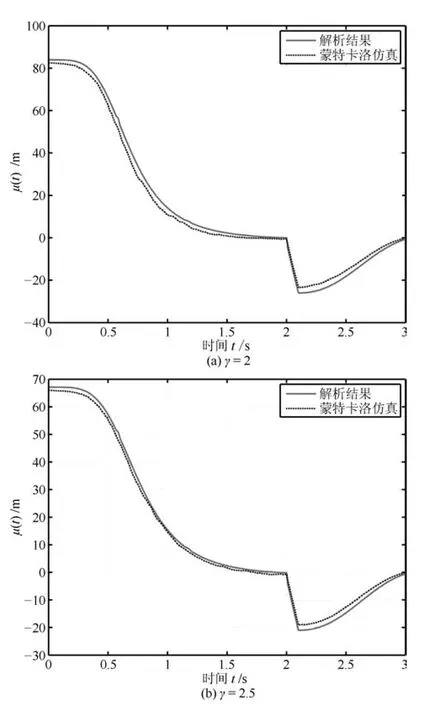
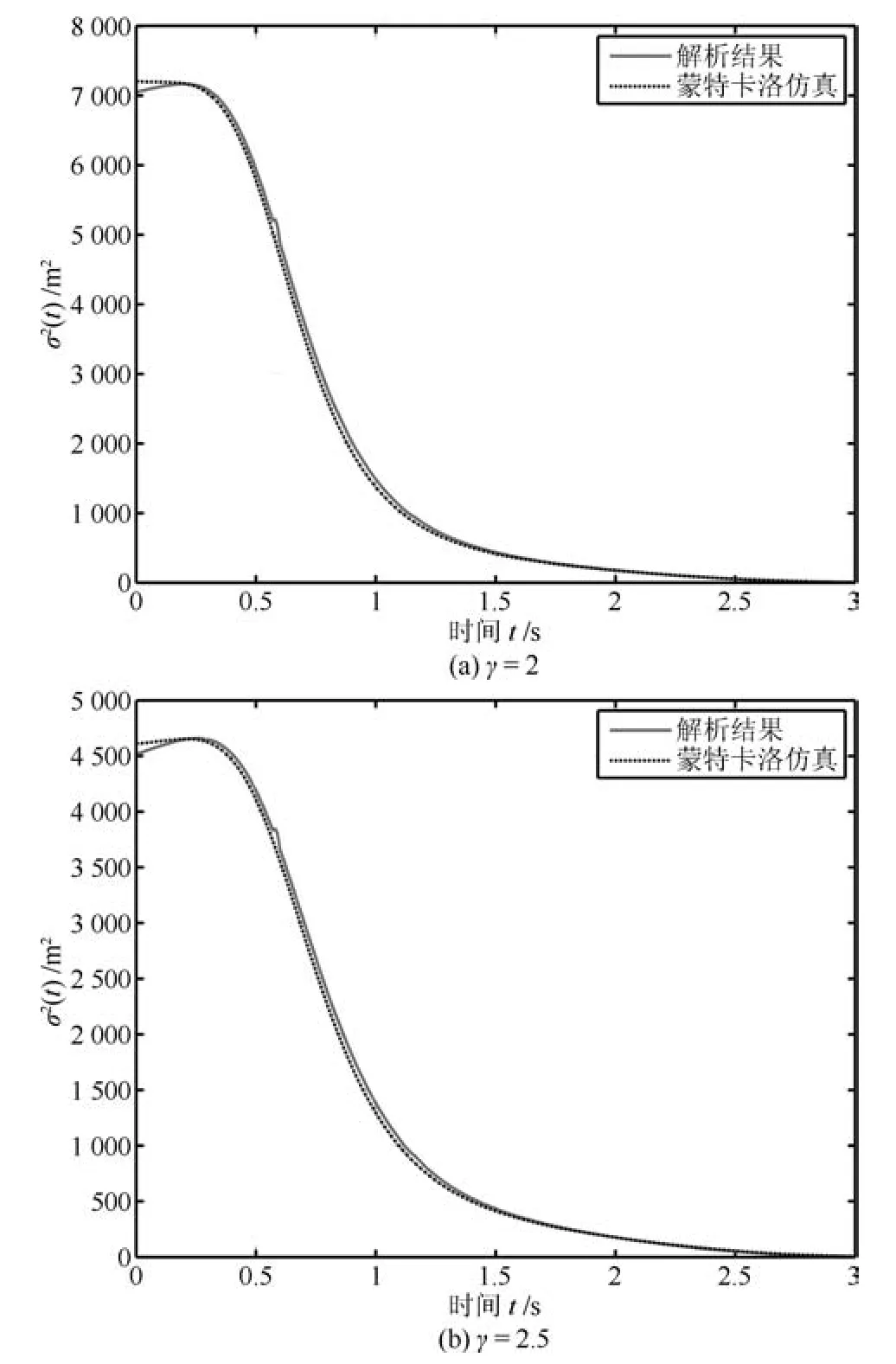
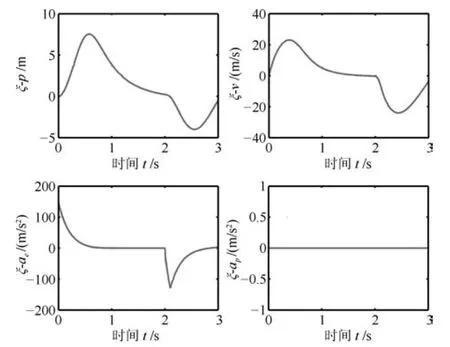
情形1.tf 結合式(15)觀測模型可以得到下述濾波方程 其中,k(t)為系統的連續Kalman增益矩陣且滿足 P(t)為預測誤差的協方差矩陣,滿足下述Riccati方程 情形2.tsw≤tf 1)t∈[0,tsw),此時估計器一直保持正確的模式,狀態估計誤差的均值和方差矩陣分別如式(25)和(26)所示. 2)t∈[tsw,tf],此時存在模式失配,系統的狀態方程為 估計器的濾波方程仍為式(20).根據定義,可以得到狀態估計誤差的時間傳遞方程: 求解方程(28)得到 利用式(24)可得: 將其代入式(29),則 根據定義,狀態估計誤差的均值為 狀態估計誤差的方差矩陣同式(26).詳細的推導過程見附錄A. 情形3.tsw+?t≤tf.需要分三段進行討論: 1)t∈[0,tsw),此時系統的狀態方程和估計器的濾波方程分別如式(19)和(20)所示,狀態估計誤差的均值和方差矩陣則分別見式(25)和(26). 2)t∈[tsw,tsw+?t),存在模式失配,此時系統的狀態方程和估計器的濾波方程分別如式(27)和(20)所示,狀態估計誤差的均值和方差則矩陣分別見式(32)和(26). 3)t∈[tsw+?t,tf],估計器回到正確的目標模式上,此時的系統狀態方程為式(27),而估計器的濾波方程為 根據定義,可以得到狀態估計誤差滿足方程 求解得到 由式(31)可得: 代入式(35)后得到 根據定義,狀態估計誤差的均值為 狀態估計誤差的方差矩陣滿足式(26),詳細推導見附錄A. 其中,ψ(θ)=exp(?θ)+θ?1. 因此,存在模式失配時每一時刻ZEM 的估計誤差均服從有偏的高斯分布,其均值和方差分別為μ(t)和σ2(t).從式(40)和(41)的結果來看: 1)制導系統對ZEM估計誤差的的影響主要體現在導引律、彈目時間常數、剩余飛行時間tgo以及觀測精度4個方面;目標的影響則主要體現由機動導致的模式失配上. 2)模式失配只影響ZEM估計誤差的均值μ(t),對σ2(t)沒影響. 3)μ(t)和σ2(t)與系統所用的導引律無關,在后面的仿真驗證中,不失一般性,導引律選用DGL/1. 4)tgo的估計精度及彈目時間常數τe和τp通過投影向量g(t)影響脫靶量.在具體的攔截問題中,彈目時間常數通常可假定為確定已知的,而雷達導引頭可直接獲得高精度的tgo測量,因此本文分析中不考慮它們對ZEM估計誤差的影響. 5)估計器的觀測精度將直接影響到Kalman增益系數k(t),見式(21),進而影響ZEM估計誤差的均值和方差. 本節通過一個典型的TBM攔截場景驗證前面理論推導的正確性,仿真參數設置如表1,蒙特卡洛仿真次數設置為1000. 表1 仿真參數Table 1 Simulation parameters 圖5給出了兩種不同過載比γ=2和γ=2.5下ZEM估計誤差的均值變化曲線.從實驗結果可以看出,本文推導的理論結果與蒙特卡洛仿真的曲線基本吻合.由圖5還可以看出,當目標的運動模式改變時(t=2s),ZEM的估計誤差會迅速增大,當運動模式被正確識別后(t=2.1s),ZEM的估計誤差將逐漸減小.圖6給出了這兩種情形下ZEM估計誤差的方差分布,可以看出本文理論推導結果與蒙特卡洛仿真的曲線同樣也是吻合的.圖5和圖6的仿真結果充分說明了本文理論推導的正確性. 圖5 ZEM估計誤差的均值Fig.5 Mean of ZEM estimation error 圖7給出了各狀態分量的估計誤差.由該圖可見,當目標運動模式改變后,各狀態分量的估計誤差都迅速增大,當模式匹配后,估計誤差逐漸減小;導彈自身加速度估計誤差分量不受模式失配的影響,這與導彈自身的加速度模型是完美可知且可精確測量的假設相一致. 圖6 ZEM估計誤差的方差Fig.6 Variance of ZEM estimation error 圖7 各狀態估計誤差Fig.7 Estimation error of every state 本文針對高速大機動目標攔截問題,推導了模式失配條件下ZEM估計誤差的分布形式.在過程噪聲和測量噪聲均為零均值高斯白噪聲且相互獨立的假定下,每一時刻ZEM 的估計誤差服從有偏的高斯分布.本文得到了各時刻ZEM估計誤差均值和方差的解析表達式,并與蒙特卡洛仿真實驗進行了對比,驗證了理論推導的正確性. 將本文的ZEM估計誤差模型應用于模式失配條件下脫靶量模型的推導,以及研究基于特征輔助的目標運動模式辨識算法將是下一步工作的方向. 附錄A 情形1中ξ(t)和Σ(t)形式證明: 因為 所以 同理,很容易推出式(32)和(38),這里不再贅述. 同理,很容易得出在情形2和情形3下,Σ(t)的表達式與式(26)相同,這里不再贅述. 附錄B








3 仿真實驗
4 結論

 猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38網絡安全與數據管理(2022年1期)2022-08-29 03:15:20導航定位學報(2022年4期)2022-08-15 08:27:00中學生數理化·中考版(2022年8期)2022-06-14 06:55:24新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36成都醫學院學報(2021年2期)2021-07-19 08:35:14新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24光學精密工程(2016年6期)2016-11-07 09:07:19
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38網絡安全與數據管理(2022年1期)2022-08-29 03:15:20導航定位學報(2022年4期)2022-08-15 08:27:00中學生數理化·中考版(2022年8期)2022-06-14 06:55:24新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36成都醫學院學報(2021年2期)2021-07-19 08:35:14新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24光學精密工程(2016年6期)2016-11-07 09:07:19