基于ECU_TEST的ECU報文自動測試研究與應用
2018-11-01 01:17:22徐永新王裕鵬
汽車電器 2018年10期
徐永新,朱 娟,王裕鵬
(濰柴動力股份有限公司,山東 濰坊 261061)
硬件在環 (Hardware-In-the-Loop,HIL)仿真設備可以在試驗室環境下完成對ECU的測試及初期匹配工作[1-2],主要被用于模擬測試整車工況,確保ECU的安全性。HIL設備自帶的自動化測試工具,如dSPACE的AutomationDesk軟件、ETAS的LABCAR Automation軟件,能將部分測試任務轉化為自動測試用例且可以24 h無人值守并自動生成測試報告,不僅提高了測試效率還節省了人力資源。但是在使用中發現二者都具有一定的局限性,自動測試用例的調試及執行離不開HIL設備,額外增加了設備的使用負擔,并且依據兩個平臺開發的自動測試用例不通用,又增加了自動測試用例開發的重復性。
經過調研并對比了TPT、Mx-Suite、TestWeaver和ECU_TEST四款軟件的優缺點后,ECU_TEST軟件可以兼容多HIL平臺及測量工具、糅合Python語言支持二次開發的優勢凸顯出來。本文基于ECU_TEST軟件進行了CAN總線報文的自動化測試實現,不僅使得測試方法更加靈活、增強了自動測試用例的可移植性,更降低了HIL平臺的使用負荷。
1 CAN報文的傳統測試
1.1 CAN通信協議介紹
CAN總線 (Controller Area Network)技術以其可靠性、實時性和靈活性強的特點,得到了諸多汽車開發商的青睞[3]。目前該技術已經成為汽車行業中的標準,CAN報文的傳輸必須遵循該協議。
DBC數據庫協議定義了一個單獨的CAN網絡的車載數據通信協議,德國Vector公司的CANdb++Editor是一個專門解析和編輯這個協議的專業化工具,這些信息是監測和分析網絡的基礎,為報文的測試提供了方便。文件包含CAN網絡的三大主要組成部分,即總線上的ECU或節點 (Node)、消息 (Message)、信號 (signal)。每個節點中顯示從這個節點的發送 (TX)和接收 (RX)的報文、發送 (TX)和接收(RX)的信號,即定義了節點之間信息的交換規則;在消息當中,集成了這個 CAN網絡上所有消息和每個消息下包含的所有信號;最后就是最基本的組成單位即信號,信號通過自身屬性能在Message下解析成十進制值,它有6個最關鍵的參數即字節序列 (ByteOrder)、位解析值類型 (Value-Type)、位起始 (StartBit)、位長 (Length)、因子系數 (Factor)、偏移量 (Offset)[4]。
1.2 傳統測試模式
CAN模塊的黑盒測試主要測試報文信號是否被控制器正確地接收和發送,包括其接收信息的準確性,是否具有溢出保護,超時故障及長度故障是否能正確報出,周期的準確性,負荷率及錯誤幀的測試。傳統的測試模式如圖1所示,將控制器、臺架、電腦、Vector工具連接在一起,然后通過報文專業測試軟件Vector CANalyzer對報文進行逐條測試,如圖2所示。傳統測試模式對DBC數據庫的應用有一定的依賴性,如果DBC數據庫沒有包含被測報文,那接收或模擬發送報文的可讀性極差,需要測試人員自己根據CAN通信協議進行換算。
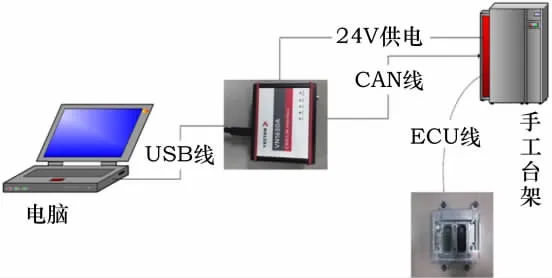
圖1 報文測試環境

圖2 CANalyzer測試報文
傳統測試模式需要逐條測試,耗時耗力。目前一個普通車輛控制器接收和發送的報文總數已經多達90多條,智能化更強的控制器所收發的報文總數多達上百條,每條message、每條signal的測試及Bug的回歸測試都將是一個艱巨的任務。
2 CAN報文的自動化測試
自動測試用例的開發過程一般如圖3所示,從測試需求開始提取Feature,通過Ecxel進行管理并形成測試管理矩陣,然后使用自動測試用例軟件進行開發及執行,并形成測試報告。
ECU_TEST軟件可以按照圖1進行報文自動化測試環境的搭建,這種連接方式脫離了HIL設備,降低其使用負荷,有效地推進了自動測試用例調試工作的開展。
基于ECU_TEST軟件可以使用Bus access和VECTOR-HW Jobs兩種方法進行CAN報文自動測試用例的設計及執行。
2.1 基于Bus access的報文自動化測試
Bus access測試方法依賴DBC數據庫,可以對任意message、任意Signal的周期設定、循環發送、讀取、停發的操作。如圖4a所示,是對TSC1_TE報文的使能及周期設定、循環發送及停發;如圖4b所示,是對EEC1報文的讀取及判斷。

圖3 自動測試過程
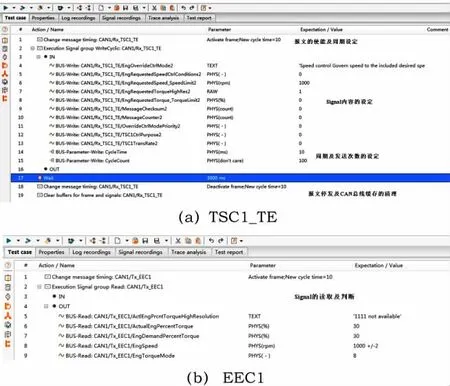
圖4 Bus access測試方法對TSC1_TE及 EEC1報文的操作
Bus access對Signal值設定的形式非常靈活,可以是按照CAN通信協議轉換后的物理值 (PHY),可以是各種模式的文本模式 (TEXT),也可以是DBC文件中的Raw Value。這種測試方法將DBC數據庫的優點完全繼承過來,增強了報文的可讀性。但是這種方法對DBC的依賴性不容忽視,如果某條報文沒有及時被添加至DBC數據庫中,那么這類報文的自動化測試我們將束手無策;如果在報文自動測試用例開發的過程中使用的DBC文件不一致,那么所有的自動測試用例將無法放在同一個測試環境下合并測試。
因此,Bus access方法必須嚴格管理DBC數據庫。
2.2 基于VECTOR-HW Jobs的報文自動化測試
VECTOR-HW Jobs的報文自動化測試方法則可以完美地解決上述問題,脫離DBC的限制。ECU_TEST軟件通過調用Vector API函數來實現報文的讀取和發送。
但是VECTOR-HW Jobs現有的操作方法不管是報文返回值還是發送值都是ECU_TEST軟件中特定的ByteStream格式,如7D:00:2C:03:FF:FF:FF:FF,其可用性較差,不能直接與控制器中的變量進行判斷。如何將ByteStream類型數據與發動機轉速、車速之類的物理值進行互相轉化則成為VECTOR-HW Jobs方法的使用關鍵。
基于ECU_TEST軟件自帶的ByteStream、BitStream操作方法并結合Python語言進行不同測試需求的二次開發。目前已經完成如表1所示的模塊庫,以支撐VECTOR-HW Jobs方法的應用。

表1 模塊庫說明
2.2.1 ByteStreamCreation模塊庫
ByteStreamCreation模塊庫通過調用Python對List的處理方法和ByteStream方法實現了指定物理值的循環發送。ByteStreamCreation模塊庫的主要作用不局限于此,還會將控制器中經過CAN總線解析后的變量與其進行判斷,確定報文已經發送至CAN總線并被控制器正確接收。被寫入的Byte可以是單個,也可以是多個,最多可同時寫4個Byte。ByteStreamCreation模塊庫的循環次數同List的元素個數。
ByteStreamCreation模塊庫的實現是先使用Python語言將被寫入的物理值 (ListA)按照CAN通信協議進行轉化并生成新的列表 (ListB),再將ListB中的元素轉化為十六進制寫入指定Byte;測試工程師可以根據需求選擇寫入幾個Byte;最后將生成的ByteStreamA寫入指定的報文進行多次發送,并與控制器中的變量進行判斷。
該模塊庫的調用如圖5所示,只需填寫報文的ID(FrameID)、周期 (Period)、發送次數 (Counter)、內容(ListA)、因子 (Factor)、偏移 (OffSet)、Byte索引值 (Index)、控制器變量 (VALUE_ECU)、Byte個數 (Num),便可獲知報文發送及接收的結果。
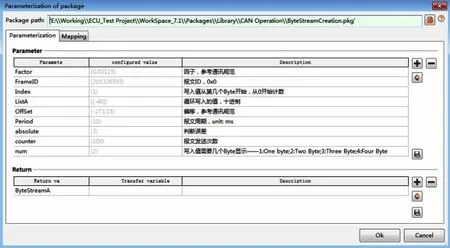
圖5 ByteStreamCreation模塊庫調用
2.2.2 BitStreamCreation模塊庫
ByteStreamCreation模塊庫可以完成一個或多個Byte的寫入,但是如圖6所示的報文需求 (僅使用一個Byte中的幾個Bit)卻無法實現。針對該問題開發了BitStreamCreation模塊庫。
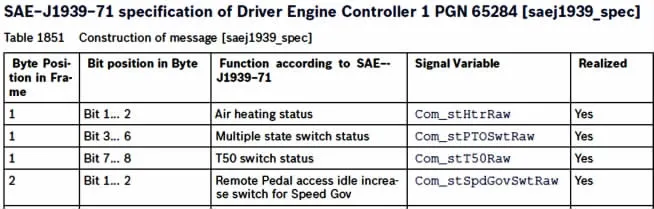
圖6 DEC1報文
BitStreamCreation模塊庫的主要作用是循環將表格中的數據發送到報文指定Byte的指定Bit(任意長度)中,并與ECU中總線解析后的變量進行判斷;僅限于寫入同一個Byte中Bit;循環次數同表格的元素個數。BitStreamCreation模塊庫的實現先使用Python語言將被寫入的物理值 (ListA)按照CAN通信協議進行轉化并生成新的列表 (ListB),再將ListB中的元素左移后轉化為十六進制寫入指定Byte,最后將生成的ByteStreamA寫入指定的報文進行多次發送,并與控制器中的變量進行判斷。
該模塊庫的調用同ByteStreamCreation類似,如圖7所示,需進行參數化的變量有:報文的ID (FrameID)、周期 (Period)、發送次數 (Counter)、內容 (ListA)、因子 (Factor)、偏移 (OffSet)、Byte索引值 (Index)、控制器變量 (Variable_ECU)、Bit開始的位置 (StartBit)。
2.2.3 CAN_Read模塊庫
CAN_Read模塊庫是ByteStreamCreation、BitStreamCreation兩個模塊庫的逆操作,它可以獲取報文的一個Byte、多個Byte及任意長度的Bit內容。CAN_Read模塊庫的返回值有兩種形式,分別是十六進制與ByteStream類型,十六進制返回值使用Python語言取整后即可獲得十進制數值,而ByteStream類型返回值則需要使用ByteConvertToNumber模塊庫,將其轉化為十進制。
CAN_Read模塊庫是先根據報文ID讀取CAN總線上的報文內容,然后對返回值 (ByteStream類型)進行不同需求的取片處理。在調用該模塊庫時根據測試需求可進行選擇性參數化,如圖8所示。
3 測試執行及結果分析
目前我們使用上述兩種方法已完成控制器85條收發報文的自動測試用例編寫及調試。報文自動測試用例的放行測試如圖9所示,將所有自動測試用例放在同一個Project中即可逐條運行并自動生成測試報告。
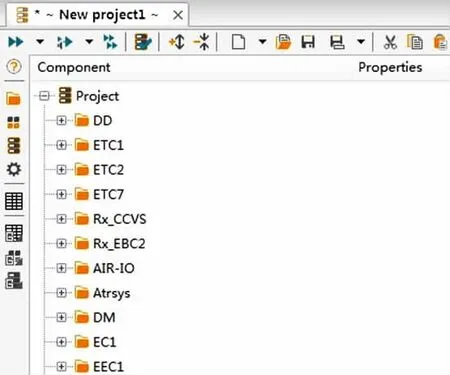
圖9 Project
如圖10所示,執行112條自動測試用例耗時1h16min,其中有93條自動測試用例PASS,占比82.3%,19條自動測試用例FAIL,占比16.81%。這相對于傳統測試模式,已經大大提高了測試效率。

圖10 Report
4 結論
1)本文提供兩種CAN報文測試方法,打破DBC文件的束縛,脫離HIL平臺的限制,使測試方法更靈活自如。
2)模塊庫的開發及應用保證了自動測試用例的一致性、重復性,降低人為因素的干擾。
3)自動化測試在控制器軟件的開發及Bug修復的過程中,保證了測試用例的通用性、可移植性,更重要的是節省大量時間、提高測試效率。
該方法已在我們的工作中實際應用并取得了較好的效果。