某越野車整車姿態參數化設計
2018-10-31 10:47:08韓偉
汽車科技 2018年4期
關鍵詞:參數化設計
韓偉

摘 要:整車姿態設計是越野車輛整車總布置設計中的一項重要工作,它涉及到重量控制、造型、整車視野、懸架行程與剛度、操縱穩定性及通過性等諸多要素。本文在某4×4越野車整車姿態設計過程中,基于Excel表格與CATIA軟件,應用參數化設計方法,分析了雙橫臂獨立懸架系統剛度與地面線設計過程。該方法可以推廣應用于同類型越野車整車姿態的設計中。
關鍵詞:參數化設計;越野車;整車姿態;懸架剛度
中圖分類號:U462.2 文獻標識碼:A 文章編號:1005-2550(2018)04-0025-04
Abstract: The complete vehicle attitude design is an important work in the overall layout design of the off-road vehicle, which involves many factors such as weight control, modeling, vehicle vision, suspension stroke and stiffness, handling and control stability and passing ability. In the process of attitude design of a 4×4 off-road vehicle, this paper analyzed the design process of the double wishbone independent suspension system stiffness and the ground line, using the application of parametric design based on Excel and CATIA software. This kind of method can be used to promote the complete vehicle attitude design of other off-road vehicles on the same platform.
Key Words: parametric design; off-road vehicle; the complete vehicle attitude; suspension stiffness
1 引言
在越野車輛整車總布置設計中,整車姿態設計是一項重要工作。
整車姿態是車輛的重要參數,涉及到重量控制、造型、整車視野、懸架行程與剛度、操縱穩定性及通過性等諸多要素。姿態的控制主要體現在地面線的設定上,為使整車姿態能夠滿足各方面要求,需要在整車概念設計階段就要確定地面線。由于地面線的變化主要通過對懸架系統安裝位置和剛度的調節來實現,在設計的過程中,首先根據整車初始姿態確定前后懸架硬點的初始相對位置坐標,對于輕型越野車,整車初始姿態角一般確定為0.5°~0.8°。搭載雙橫臂獨立懸架的越野車輛,整車初始姿態一般由前后懸架硬點的Z向差值來確定,在確定整車初始姿態后,再通過懸架的剛度參數來設計整車空載、滿載姿態,以滿足整車高度、離地間隙等各方面的要求。懸架剛度參數的設定需要在保證乘坐舒適性的基礎上,不斷地優化直至滿足為止。因此整車姿態的設計過程主要是前后懸架剛度參數的設定過程。
引入參數化概念,可以在更改布置方案時,僅通過更改相應的參數,驅動軟件自動更新模型,可有效提高校核工作的質量與效率。
參數化設計指以參數約束模型為核心,以尺寸驅動為特征,通過修改基礎模型的某些零件參數,CATIA軟件自動完成對模型的重構,從而實現產品的設計和優化。參數化設計可以將隱式的設計實踐轉化為嵌入整個設計過程的顯式知識,極大地改善了模型的修改重構手段,提高了設計的柔性。
本文基于CATIA軟件和EXCEL表格,應用參數化方法,有效解決了某平臺下一款4×4越野車型整車姿態設計問題。
2 整車姿態定義
整車姿態定義主要體現在地面線的設定。對于越野車,通常假設車架縱梁上平面為參考基準,設計狀態作為初始姿態,在得到輪心坐標、輪胎型號、一定載荷下的輪胎半徑、懸架剛度、各狀態下軸荷與輪荷后,便可完成地面線繪制,整車姿態角也隨即確定。
各狀態下的軸荷、輪荷由整車重量管控對各系統的重量分配得到,設計狀態的輪心坐標、輪胎選型、懸架選型參考同平臺車型或者競品車型。下面主要分析懸架剛度及各狀態下輪心坐標的確定。
2.1 懸架剛度的參數關系
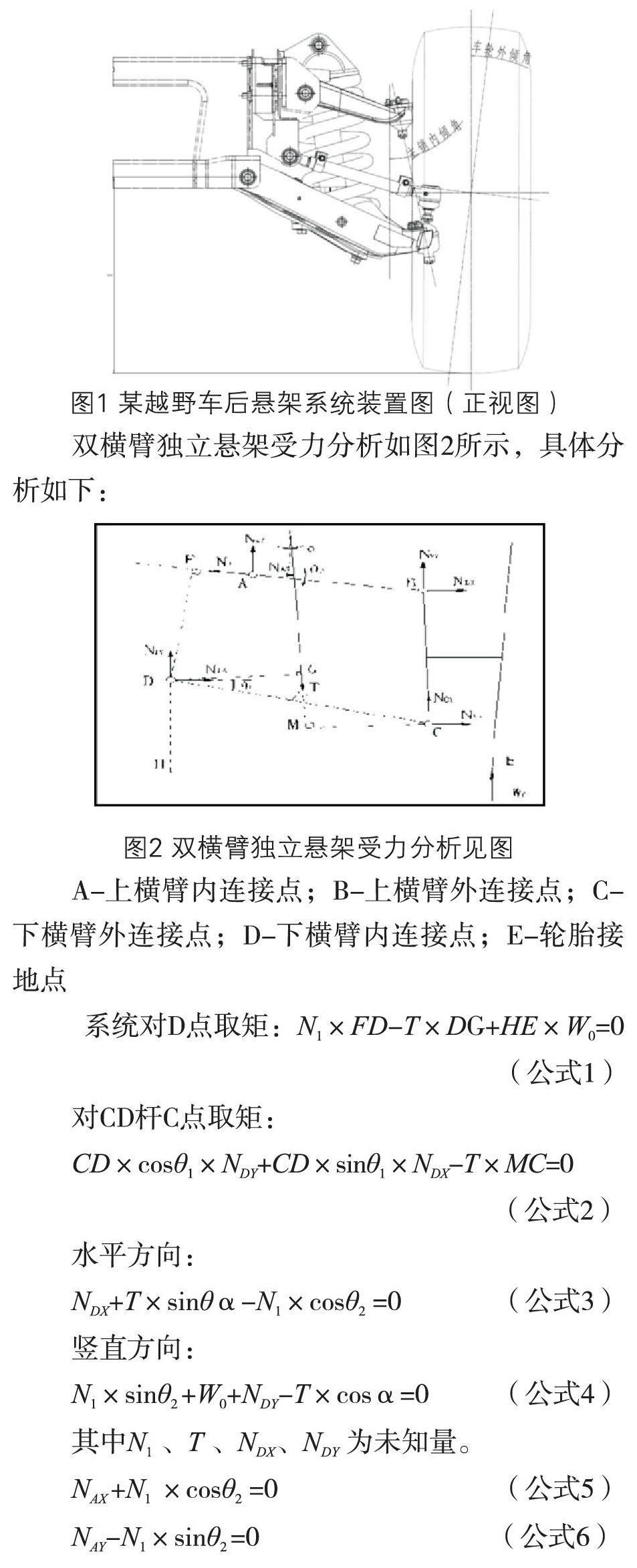
本文所研究的車型采用前后雙橫臂獨立懸架,前懸架帶橫向穩定桿,后懸架帶推力桿(如圖1所示)。懸架系統設計需要綜合考慮設計狀態輪心坐標、整車高度、最小離地間隙、硬點布置、側傾角剛度、上下輪跳、四輪定位參數、K&C;特性、整車操縱穩定性、整車NVH、通過性、零部件通用化等。
3 基于CATIA參數化模型建立
根據公式(1)~(16),通過EXCEL表格建立懸架系統參數設計計算表,可以得到螺旋彈簧剛度、懸架系統剛度、懸架系統偏頻等參數,其它參數(例如,減振器、橫向穩定桿、推力桿、懸架系統角剛度、側傾中心高度等等)的計算,限于篇幅,本文不再贅述。各質量狀態下整車姿態確定需要的參數可根據設計輸入、各系統初步設計結果得到。在完成參數表后,應用CATIA軟件,在零部件設計模塊里,用Formula(f(x))命令導入這些參數。在建立參數化模型時,各硬點的約束尺寸都可以通過CATIA軟件的公式編輯功能建立與已導入參數的關系。這樣在調整方案時,就可以通過修改參數值,達到更改模型的目的。
通過以上設計并經過幾次迭代,并對各狀態下的姿態復核,校核各狀態下最小離地間隙、整車高度、傳動角范圍、輪胎包絡以及整車操縱穩定性、整車NVH等等,最終得到該越野車整車姿態參數如表1所示。
4 結論
在同一車型開發過程中,受到各種約束條件的限制,最小離地間隙,懸架行程,輪胎包絡間隙,傳動角范圍,通過性,零部件通用化,以及基于底盤調校等,都需要對地面線進行微調和修正。另外對于同平臺其它變形車,因軸荷、軸距等參數變化,也需要對地面線進行調整。本文結合我公司開發的一款越野車的實際經驗,提出了一種基于參數化設計的整車姿態設計方法,可以很容易推廣到其它同類越野車型,具有一定的設計參考意義。
參考文獻:
[1]王新,李衡輝.某車型整車姿態分析[J].汽車科技,2009(3).
[2]羅文水,凌紅芳,王師等.乘用車整車姿態設定及控制方法研究[J].機電工程技術,2014(8):116-121.
[3]程康,宋發寶等.乘用車整車設計與達成研究.2015中國汽車工程學會年會論文集:2087-2089
[4]劉惟信.汽車設計.清華出版社,2001.
[5]劉巧伶.理論力學.吉林科學技術出版社,2004.
[6]王霄鋒.汽車底盤設計[M].北京:清華大學出版社,2010.
猜你喜歡
湖南大學學報·自然科學版(2017年4期)2017-05-18 15:46:24
科技視界(2017年1期)2017-04-20 00:28:09
科學與財富(2017年7期)2017-04-11 01:59:03
山東工業技術(2017年7期)2017-04-10 04:50:08
中國高新技術企業(2017年3期)2017-03-30 11:15:42
中國科技博覽(2016年27期)2017-01-23 00:09:21
軟件導刊(2016年9期)2016-11-07 21:27:21
科技資訊(2015年19期)2015-10-09 19:31:12
科技資訊(2015年8期)2015-07-02 18:34:21
計算機輔助工程(2015年2期)2015-05-11 10:42:09
