基于反步法的四旋翼無人飛行器混合增穩控制
2018-10-30 05:53:16王日俊曾志強段能全杜文華王俊元申清芳
電子產品世界 2018年9期
王日俊 曾志強 段能全 杜文華 王俊元 申清芳
摘要:針對在參數變化、外部干擾條件下四旋翼飛行器的穩定飛行控制問題,本文提出了一種基于反步法的四旋翼飛行器增穩控制方法。首先,建立四旋翼飛行器的動態模型。其次,基于反步法設計的控制器用于飛行器姿態控制,采用模糊自適應PID控制器對飛行器的高度和位置進行控制,將兩者結合構成一個內環姿態和外環位置結構的雙閉環控制器,從而實現四旋翼飛行器的混合增穩控制。仿真和實際測試結果表明所設計的控制器能夠實現參數變化和外部干擾時的穩定控制。
關鍵詞:反步法;模糊自適應PID;飛行控制;四旋翼飛行器;穩定性
DOI: 10.3969/j.issn.1005-5517.2018.8.007
O引言
近年來,由于四旋翼飛行器具有很好的機動性及特殊的機械結構,使其在軍事偵察、自然災害、信息測繪、交通控制、城市應急救援、電影拍攝等領域得到了廣泛應用[1-2]。四旋翼飛行器是一種新的微型直升機,通過四個獨立的旋翼實現垂直起飛和垂直降落,通過調節四個旋翼的轉速來實現其位置和姿態的控制。同其他的機平臺相比,四旋翼飛行器有許多優勢,例如:懸停能力、體積小、成本低以及強大的環境適應能力。然而,在控制方面,四旋翼飛行器也存在如非線性、多變量、欠驅動性、抗干擾能力弱及易耦合性強等問題[3]。
目前,國內外學者針對如何控制四旋翼的位置和姿態問題開展了大量的研究工作。其中,最常見有線性反饋算法[4]、LQR[5]、PID控制[6]以及滑模控制[7]等。這些算法在控制四旋翼飛行器的位姿方面有很好的效果,相應的也有自身的缺點。例如PID和LQR控制算法忽略了模型的非線性因素,而非線性因素對控制結果有不小的影響。另外,PID控制算法不能在線調整參數:線性控制理論LQR不適用于非線性和耦合性強的系統。在文獻[8]中,應用了一個集成反步控制器來控制四旋翼飛行器的水平位置和高度。滑模控制算法具有簡單、可靠的優點,是一種很有效的控制算法,但是它也帶來了顫振現象[9]。文獻[10]提出了一種基于解析模型的滑模PD控制器來實現對旋翼的控制。文獻[11]針對姿態穩定化問題,采用混合反步算法來創建姿態角加速度函數。整體反步控制算法也可以用于四旋翼的控制,不足的是,整體反步算法需要有精確的模型,且其魯棒性較差。現有的許多研究均表明,在系統不確定性條件下,滑模控制器有很好的控制效果,但它有很高的增益和控制輸入。
因此,本文針對在參數變化、外部干擾條件下四旋翼飛行器的穩定飛行控制問題,將反步控制與模糊自適應PID控制相結合,提出一種不僅能達到控制效果,同時具有強大抗干擾能力的混合增穩控制算法。利用不確定參數的更新定律的反步算法和模糊自適應算法來實現飛行器的增穩控制,提高飛行的穩定性。
1 四旋翼飛行器建模
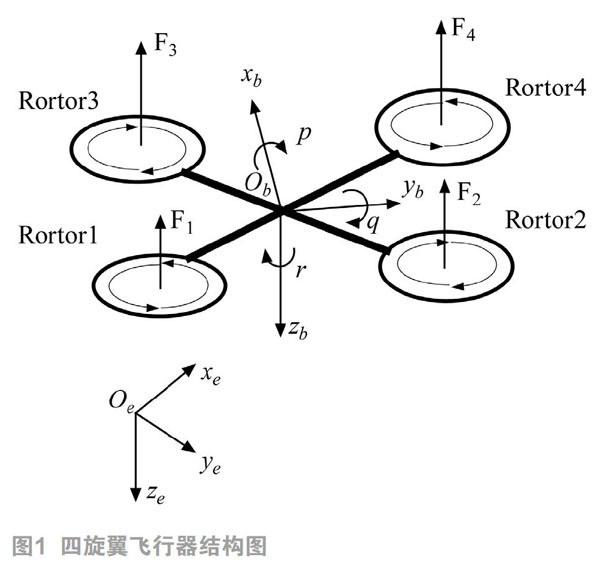
四旋翼飛行器的結構原理如圖1所示,十字架的末端有四個電機。轉子對(1,4)逆時針方向旋轉,轉子對(2,3)轉向與(1,4)相反,來平衡由轉子旋轉產生的扭矩。轉子4速度增加了多少,以相同量級降低轉子1的速度,會使機產生傾斜運動,通過調整轉子對(1,4)的相對速度來控制機的俯仰角;類似地,通過調節轉子對(2,3)的相對速度來控制機的滾轉角度;通過調節的逆時針轉動的轉子對(1,4)和順時針轉動的轉子對(2,3)之間的相對速度來控制機的偏航角。推力的控制是通過調節四個轉子的速度來實現的。定義系統中兩個參考坐標系分別為慣性坐標系和機體坐標系。慣性參考系為Oe(XeYeZe),主體參考系為Ob(XbYbZb)。四旋翼機的絕對位置由X=[x,y,Z]T和姿態角Q=[φ,θ,ψ]T決定,其中姿態角包含三個方向角度,分別是滾轉角(繞x軸)、俯仰角(繞y軸)、偏航角(繞z軸)。由一個在低速環境下的簡單四旋翼飛行器動態模型可以得到:
2 增穩控制器的設計
本文所設計的增穩控制器采用雙閉環控制結構,即用于飛行器高度和位置控制的模糊自適應PID控制器構成位置外環,用于飛行器姿態控制的反步控制器構成姿態內環。
2.1 模糊自適應PID控制器
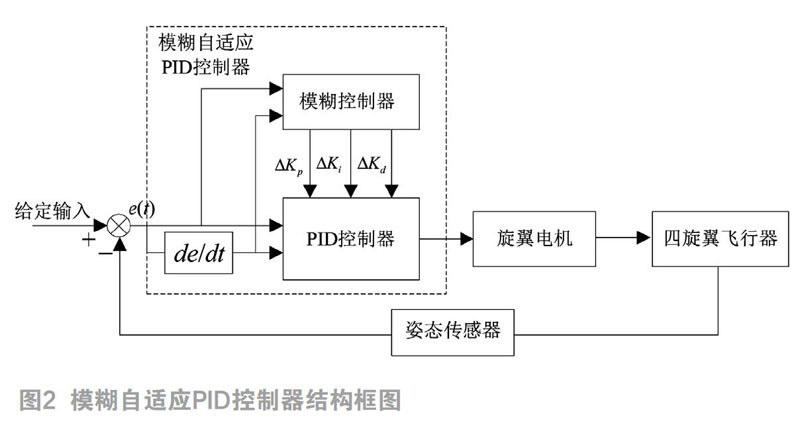
模糊自適應PID方法是基于應用模糊邏輯概念的智能算法。模糊自適應PID控制器本質上是一種PID控制器,它采用模糊推理系統,根據誤差(E)和誤差的導數(△EC)來調節參數Kp,Ki,Kd。圖2給出的是模糊自適應PID控制器的結構框圖。
模糊規則設計是基于PID控制器的屬性。因此,模糊集的輸出由輸入模糊集和設計的模糊規則得到。在模糊結構的基礎上,每個PID控制器有兩個模糊推理輸入即誤差和誤差的導數,有三個模糊推理輸出,所有的論述都是在這五個模糊子集中共享。模糊規則的語言標簽定義如下:NB,負的最大值:NS,負的最小值;ZO,近似為0:PS,正的最小值:PM,正的中間值;PB,正的最大值。模糊輸入變量由五個語言變量組成:
E= {NB,NS,ZO,PS,PM)。語言變量輸出被定義為:△Kp= {ZO, PS, PM, PB},△ K={ZO, PS, PM, PB},△ Kd={ZO,PS,PM,PB)。模糊推理規則如表1所示。
模糊推理規則表是基于輸入、輸出隸屬函數的數量來制定的,所有的輸入、輸出隸屬函數都應該被評估。表一中給出的模糊推理規則可以用下述方法解讀:若誤差為A,誤差的導數為B,輸出為C。例如,誤差(E)取負的最大值(NB),誤差的導數(△EC)取正的最大值(PB),那么△Kp輸出為正的最大值(PB)。
圖2給出的是模糊自適應PID控制器的框圖,最終的模糊PID參數優化算法是:
Kj(K +1)=Kj(0)+△K,(K)
j=p,i,d
(4)
對于飛行器高度控制的問題,模糊自適應PID控制器對于高度的控制是線性的,設定跟蹤誤差為e=zd-zZd為給定高度,則有,
其中,g代表重力加速度,當飛行器處于盤旋狀態時,假設飛行器滾轉角和俯仰角均為0,則公式(5)簡化為:
得到高度控制的控制輸入為:
對于飛行器的位置控制問題,可以通過控制滾轉角和俯仰角大小,使四旋翼機在x,y方向上移動,進而產生運動。控制滾轉角大小能夠使飛行器沿y軸方向移動,控制俯仰角使得飛行器沿x方向運動。由式(1)可知其動力學模型為:
在高度和位置控制環增加了模糊控制模塊,在誤差E、EC和PID的三個參數之間形成了模糊控制關系。通過監測誤差、誤差的導數的實時值,對PID算法的△Kp,△Kj以及△Kd進行實時修正。
2.2 反步控制器
姿態控制不僅影響到飛行穩定性,還是位置控制的必要條件。因此四旋翼飛行器的姿態控制尤為重要。反步控制器的設計是基于以下假設,即系統的滾轉角、俯仰角、航偏角滿足下列不等式[12]:
通過控制輸入Ul,U2,U3和U4,能夠實現四旋翼飛行器的穩定飛行。
3 實驗研究
3.1 仿真實驗
在Matlab/simulink中實現了所提出的控制算法,通過抗干擾測試驗證本文提出混合增穩控制器的性能。四旋翼飛行器的主要參數如表2所示。
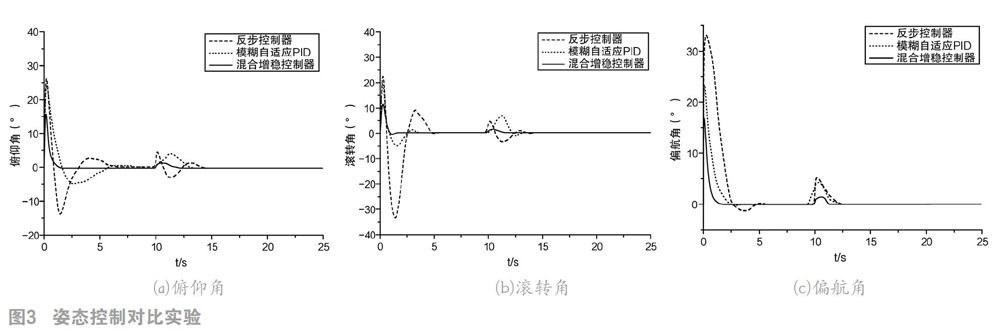
為了增強飛行器對在參數不確定性和外界干擾條件下的響應,進行了反步控制器、模糊自適應PID控制器、模糊自適應PID混合增穩控制器的仿真測試。實驗條件為在lOs時,對每個軸上施加一個擾動,并在13s時移除干擾,姿態控制和高度控制的實驗結果分別如圖3和圖4所示。其中,實線為本文提出增穩控制算法,點劃線為反步控制算法,虛線為模糊自適應PID控制算法。
由圖3和圖4可知,本文所提出的混合增穩控制器的調節時間優于反步控制器和模糊自適應PID控制器,超調量最小、穩態階段的穩態誤差類似于反步控制器和模糊自適應PID控制器。在干擾發生期間,所設計的增穩控制器不僅能完成姿態和高度的控制,具有較好的抗干擾能力,而且比反步控制器和模糊自適應PID控制器具有更好的跟蹤響應能力。
3.2 飛行實驗
通過實際飛行過程中的抗干擾實驗,進一步驗證了混合控制器的性能。在t=12s時對四旋翼飛行器的姿態角進行隨機干擾,實驗結果如圖5所示。可以看出,滾轉角、俯仰角、偏航角的角響應通常是相似的,均在短時間內收斂到給定值的允許范圍內。:在t=7s時對高度控制進行隨機干擾,如圖6所示。可以看出,高度方向上也有很好的響應,高度值在短時間內達到期望值。在擾動條件下,所提出的增穩控制器能夠迅速穩定四旋翼飛行器,具有較強的魯棒性。當系統穩定時,四旋翼飛行器的姿態角在±3。的控制范圍內。
4 結論
為提高四旋翼機在參數變化和外部干擾條件下的飛行穩定性,提出并設計了基于模糊自適應PID控制器和反步控制器的混合穩定增強控制方法,實現了對四旋翼飛行器的精確控制。非線性仿真試驗結果表明,所提出的控制器可以有效抑制擾動的影響,提高控制精度。通過對自由度四旋翼飛行器的飛行試驗,證明了該控制器的穩定性和有效性。
參考文獻:
[1]郭學強基于多模型自適應控制的四旋翼飛行器的姿態控制研究[D]中國地質大學(北京),2016
[2]k吳琛,蘇劍渡四旋翼飛行器的軌跡跟蹤抗干擾控制[J]控制理論與應用,2016, 33(11):1422-1430
[3]Carrillo L R G, Colunga G R F,Sanahuja G, et al. Quad Rotorcraft Switching ControlAn Application for the Task of Path Following[J]. IEEE Transactions on Control SystemsTechnology, 2012, 22(4):1255-1267
[4]楊立本,章衛國,黃得剛基于ADRC姿態解耦的四旋翼飛行器魯棒軌跡跟蹤[J]北京航空航天大學學報:自然版,2015, 41(6):1026-1033
[5lReyes-Valeria E, Enriquez-CalderaR. Camacho-Lara S, et al. LQR control for a quadrotorusing unit quaternions: Modeling and simulation[Cl// International Conference on Electronics,Communications and Computing. IEEE, 2013:172-178
[6]Khatoon S,Shahid M, lbraheem, et ai Dynamic modeling and stabilization of quadrotor usingPID controller[C]// International Conference on Advances in Computing, Communications andInformatics.IEEE, 2014:746-750
[7]王璐,李光春,王兆龍,等欠驅動四旋翼無人飛行器的滑模控制[J]哈爾濱工程大學學報,2012,33(10):1248-1253
[8]Lee D B.Nataraj C, Burg T C, et al. Adaptive tracking control of an underactuated aerialvehicle[C]// American Control Conference. IEEE, 2011:2326-2331
[9]Li, Tong, Zhang, et al. Passive and active nonlinear fault-tolerant control of a quadrotOfunmanned aerial vehicle based on the sliding mode control technique[J]. Proceedings of theInstitution of Mechanical Engineers Part l Journal of Systems& Control Engineering, 2013,227(1):12-23
[10]Patel A R.Patel M A, Vyas D R Modeling and analysis of quadrotor using sliding modecontroI[C]// System Theory. IEEE, 2012:111-114
[11]Colorado J. Barrientos A, Martinez A, et al. Mini-quadrotor attitude control based on HybridBackstepping&Frenet-Serret; theory[C]// IEEE International Conference on Robotics andAutomation. IEEE, 2010:1617-1622
[12]黃牧基于反步法的微型四旋翼無人飛行器非線性自適應控制研究[D]天津大學,2009
