海洋二號衛(wèi)星回波模擬器遠程控制的設計
2018-10-24 07:46:14萬鑫瑞
電子設計工程 2018年20期
萬鑫瑞
(1.中國科學院國家空間科學中心北京100190;2.中國科學院大學北京100049)
星載微波高度計[1]是一個復雜的雷達系統(tǒng),利用回波模擬器采用射頻仿真技術對星載雷達高度計進行測試驗證是一個相對理想的方法[2]。回波模擬器負責將雷達信號進行信號處理后得到的具有發(fā)射特性和目標散射特性的回波信號發(fā)送給雷達接收機。因此回波模擬器是星載衛(wèi)星高度計回波模擬器的重要監(jiān)測設備[3]。
回波模擬器需在高度計分系統(tǒng)聯(lián)試、測試,以及整星聯(lián)試、測試中為高度計提供滿足要求的點目標回波、面目標回波。為達到對高度計定量評估的目的,需要回波模擬器具有良好的穩(wěn)定性和長期一致性。然而在整星聯(lián)調(diào)和發(fā)射場測試階段由于實驗場地環(huán)境限制,回波模擬器只能在設備旁邊進行操作,且每次開機操作都需要有人進入測試現(xiàn)場。由于測試現(xiàn)場設備眾多,且存在大功率發(fā)射機,流程嚴格,不允許有操作人員進入周圍,導致回波模擬器操作不便利,帶來一定的麻煩和風險[4]。因此對新模擬器增加遠程集中管理和控制是必要的。并且為了提高可靠性和穩(wěn)定性,采用高速率的遠程控制十分的必要[5]。
1 遠程控制系統(tǒng)方案設計
本系統(tǒng)旨在通過遠程計算機與回波模擬器進行數(shù)據(jù)交互,發(fā)送指令對回波模擬器進行操作,發(fā)送數(shù)據(jù)對回波模擬器進行參數(shù)設置,以及將回波模擬器采集到的回波數(shù)據(jù)回傳儲存顯示。遠程控制系統(tǒng)總體結構示意圖如圖1所示。

圖1 系統(tǒng)總體結構示意圖
將遠程控制系統(tǒng)采用軟硬件結合的方式分為上位機和下位機(數(shù)控單元)兩個部分。系統(tǒng)的整體架構如圖2所示。
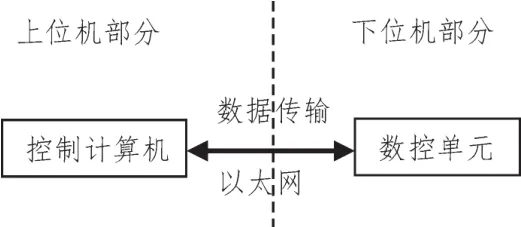
圖2 系統(tǒng)整體架構示意圖
海洋二號衛(wèi)星高度計回波模擬器遠程控制系統(tǒng)具有如下的功能:
1.1 系統(tǒng)上位機部分
上位機開發(fā)一個基于客戶端/服務器(Client-Server,C/S)結構[6]的遠程控制軟件,通過傳輸控制協(xié)議/因特網(wǎng)互聯(lián)協(xié)議(Transmission Control Protocol/Internet Protocol,TCP/IP)協(xié)議與下位機連接通信。通過千兆以太網(wǎng)與下位機實現(xiàn)高速率的穩(wěn)定傳輸。完成人機交互功能,實現(xiàn)指令的解析并將控制指令發(fā)送給回波模擬器,實時高速的接收回波模擬器發(fā)送來的數(shù)據(jù)并將其儲存在數(shù)據(jù)庫中,并且將歷史數(shù)據(jù)和設備狀態(tài)用圖表等形式顯示出來,供相關人員查看分析。
1.2 系統(tǒng)下位機部分
下位機即數(shù)控單元用來完成海平面回波模擬信號的生成,對高度計信號的捕獲跟蹤,對高度計信號采集和儲存。實現(xiàn)系統(tǒng)的時序控制,工作模式控制,接受信號處理,回波數(shù)據(jù)的生成等。建立千兆以太網(wǎng)傳輸通信方式[7],自定義設置網(wǎng)絡這件互連的協(xié)議(In?ternet Protocol,IP),實現(xiàn)高速穩(wěn)定可靠的數(shù)據(jù)傳輸。
2 遠程控制系統(tǒng)的硬件結構
2.1 系統(tǒng)硬件總體設計
本系統(tǒng)硬件設計是實現(xiàn)回波數(shù)據(jù)采集、回波數(shù)據(jù)的輸出傳送、指令狀態(tài)接收、參數(shù)數(shù)據(jù)設置的基礎。
數(shù)控單元硬件包括核心射頻接收發(fā)射模塊、模數(shù)轉換器(Analog-to-Digital Convert,AD)、模數(shù)轉換器(Digital-to-Analog Convert,DA)、雙端口隨機存取存儲器(random access memory,RAM)、千兆以太網(wǎng)模塊、并行數(shù)據(jù)讀寫PIO模塊。系統(tǒng)結構構成如圖3所示。

圖3 數(shù)控單元結構設計圖
2.2 回波模擬器數(shù)據(jù)核心模塊設計
回波模擬器核心模塊采用了基于TMS320C6701微處理的高速數(shù)字信號處理(Digital Signal Processing,DSP)技術以及基于XC4005E的現(xiàn)場可編 程 門 陣 列(Field- Programmable Gate Array,F(xiàn)PGA)技術。以TMS320C6701位核心由FPGA實現(xiàn)所有時序控制。采用大容量的高速雙端口RAM來儲存和處理運算數(shù)據(jù)。并且使用AD9117中頻采集芯片進行AD采集一級數(shù)據(jù)調(diào)制(in-phase and quadrature,IQ)正交解調(diào)[8]。
2.3 千兆以太網(wǎng)模塊
PL到PS端的數(shù)據(jù)傳輸通過AXI DMA總線進行數(shù)據(jù)交互。上位機和PS端的數(shù)據(jù)傳輸通過千兆以太網(wǎng)模塊實現(xiàn)。通過數(shù)據(jù)校驗以及辦卡設計實現(xiàn)數(shù)據(jù)高速穩(wěn)定的傳輸。數(shù)據(jù)傳輸過程如圖4所示。

圖4 數(shù)據(jù)傳輸流程圖
其中PL側到PS側的數(shù)據(jù)傳輸是利用總線協(xié)議(Advanced eXtensible Interfac,AXI)動態(tài)內(nèi)存分配(Dynamic-Memory-Allocation,DMA)IP核 通 過simple transfer方法并結合乒乓操作[9]的傳輸方式,兩個緩沖區(qū)交替進行數(shù)據(jù)的接收。每次DMA傳輸[9]都需要通過PS側主動發(fā)起,PS通過AXI總線配置PL側的AXI DMA內(nèi)部寄存器,發(fā)起一次DMA傳輸。然后通過PS的Slave AXI GP接口傳輸至PS雙倍數(shù)據(jù)速率內(nèi)存(Double Data Rate,DDR3)的緩存中。其中PS接收數(shù)據(jù)的位寬必須大于或者等于PL實際傳輸?shù)臄?shù)據(jù)長度。
發(fā)送流程如圖5所示。

圖5 發(fā)送流程邏輯圖
PL每發(fā)完一次數(shù)據(jù),AXI DMA IP便會產(chǎn)生一個中斷信號,PS得到中斷信號后將DDR3緩存的數(shù)據(jù)通過乒乓操作的方式由TCP協(xié)議發(fā)送至個人計算機(personal computer,PC)。PS側到PC機的數(shù)據(jù)通過TCP/IP協(xié)議[11]進行傳輸。TCP/IP協(xié)議也即是傳輸控制協(xié)議/因特網(wǎng)互聯(lián)協(xié)議,是一種通過3次握手實現(xiàn)的可靠的全雙工協(xié)議。使用Lwip函數(shù)庫[12]來實現(xiàn)TCP/IP協(xié)議,Lwip函數(shù)庫是用于嵌入式系統(tǒng)的TCP/IP協(xié)議棧[12],通過mailbox與內(nèi)核進行通行,然后用戶阻塞在一個專門的mailbox上,內(nèi)核完成用戶的請求后post該mailbox,用戶得意繼續(xù)執(zhí)行,其可以與行在裸機的環(huán)境中并不需要操作系統(tǒng)的支持,傳輸效率比SOCKET API高。對Lwip函數(shù)庫的配置提高TCP的傳輸效率,增大傳輸數(shù)據(jù)窗口大小并提高內(nèi)部Emac DMA的數(shù)據(jù)遷移效率。
系統(tǒng)總體邏輯控制部分流程如圖6所示。

圖6 系統(tǒng)總體邏輯控制流程圖
3 遠程控制系統(tǒng)軟件結構
3.1 通信字段及接口定義
TCP/IP采用小端對齊方式對數(shù)據(jù)進行封裝。TCP字節(jié)流順序為0XE2,0x03,0x30,0Xe5。每個數(shù)據(jù)包長度為1036字節(jié),內(nèi)容包括包頭,包類型,子包計數(shù),脈沖計數(shù),包內(nèi)容,包尾等6個部分。各個字段排列及大小如表1所示。
依據(jù)不同的功能下發(fā)不同的參數(shù)包,下位機根據(jù)定義的固定的包頭和包尾數(shù)據(jù)對包進行解析,其中包頭及包尾定義字節(jié)如表2所示。

表2 包頭包尾數(shù)據(jù)定義
數(shù)據(jù)包功能包括下發(fā)DA數(shù)據(jù)、下發(fā)多普勒表、下發(fā)程序運行參數(shù)、程序上行參數(shù)、程序上行AD數(shù)據(jù)包,具體類型及參數(shù)定義如表3所示。

表3 數(shù)據(jù)包各類型參數(shù)定義
其中每個DA數(shù)據(jù)包長度為3 ms,根據(jù)實際時間長度對兩端填0。例如,實際IQ只需1.5 ms,則將左右各0.75 ms數(shù)據(jù)填0.采樣率2.5 MSPS,每個IQ數(shù)據(jù)包共2.5*3=7.5 kB個采樣點.分為30包下發(fā),依次在子包計數(shù)中填充0x01-0x1E。
運行時下位機作為服務器,上位機作為客戶端,客戶端連接建立后,會接收到程序上行參數(shù),此外,每500 ms可接收到1次程序上行參數(shù)。
上位機發(fā)送多普勒數(shù)據(jù)給下位機,跟據(jù)下位機DA緩沖區(qū)狀態(tài)向下位機發(fā)送數(shù)據(jù)包,下位機DA緩中區(qū)大小為50 MB。上位機發(fā)送程序運行參數(shù)給下位機。
上位機若要讀取下位機AD采集數(shù)據(jù),需向下位機發(fā)送下發(fā)程序運行參數(shù),并將第6字節(jié)置為0x55,下位機會返回1個脈沖的AD采集數(shù)據(jù)(3750字節(jié)或7500字節(jié))。
3.2 軟件結構及功能
回波模擬器遠程控制系統(tǒng)的上位機軟件部分是基于LabVIEW開發(fā)環(huán)境[13]編寫完成。完成包括指令控制,參數(shù)設置,數(shù)據(jù)傳輸,數(shù)據(jù)存儲,交互通信,功率監(jiān)測,用戶操作交互等功能。系統(tǒng)采用TCP/IP協(xié)議建立與回波模擬器的連接,實現(xiàn)高速率穩(wěn)定傳輸并監(jiān)聽監(jiān)測心跳保證連接的可靠性。程序流程圖如圖7所示。

圖7 程序流程圖
上位機的GUI界面[14]組成包括指令控制,數(shù)據(jù)交互兩大模塊。其中指令控制包括開關控制,模式切換,參數(shù)設置。數(shù)據(jù)交互包括數(shù)據(jù)展示,數(shù)據(jù)儲存,功率檢測。其中數(shù)據(jù)展示是依據(jù)獲取到的上行數(shù)據(jù)得到功率的數(shù)據(jù),并將其用圖形的方式展示出來,并且數(shù)據(jù)采用Sql Server進行標準數(shù)據(jù)格式的存儲。具體結構如圖8所示。

圖8 上位機界面功能組成
4 系統(tǒng)測試
4.1 穩(wěn)定高速率測試
測試千兆以太網(wǎng)的高速率穩(wěn)定傳輸,使用Iperf工具[15-16]。Iperf是一個網(wǎng)絡性能測試工具,可以測試最大TCP和UDP帶寬性能,具有多種參數(shù)和UDP特性。可以根據(jù)需要進行調(diào)整,并且可以報告帶寬、延遲抖動和數(shù)據(jù)包丟失情況。使用與下位機定義設置的監(jiān)聽IP號及端口號,進行連接檢測傳輸TCP的帶寬性能。傳輸速率結果如圖9所示:

圖9 傳輸速率測試圖
可以看出每5秒報告的TCP數(shù)據(jù)包發(fā)送速率穩(wěn)定在76 MB/s左右。
4.2 系統(tǒng)功能測試
測試完成遠程控制系統(tǒng)的各個功能效果。實現(xiàn)了回波模擬器的遠程控制功能,參數(shù)設置,數(shù)據(jù)傳輸,功率監(jiān)測及數(shù)據(jù)存儲能回放等功能。系統(tǒng)界面操作圖如圖10所示。

圖10 系統(tǒng)操作界面示意圖
通過按鈕斷開或開啟下位機連接,當TCP連接上以后現(xiàn)實綠色保持連接狀態(tài)。左半部分進行各個參數(shù)的設置完成參數(shù)的下發(fā)。右半部分進行多普勒,DA等數(shù)據(jù)傳輸和下發(fā)。
上位機部分接收返回的功率信號實現(xiàn)功率波形監(jiān)測。其中波形圖可放大或縮小展示也可以通過保存數(shù)據(jù)將數(shù)據(jù)保存成本地文件格式。如圖11所示。

圖11 工具波形監(jiān)測圖
5 結論
文中設計的海洋二號衛(wèi)星高度計回波模擬器的遠程控制方案可以用于星載設備的遠程控制,測試和聯(lián)調(diào)。能夠解決設備的模式切換、參數(shù)設置、數(shù)據(jù)載入等操作復雜易出錯的問題;解決在衛(wèi)星聯(lián)調(diào)合發(fā)射場的測試過程中,回波模擬器只能在設備旁邊進行操作的問題;解決每次開機操作都需要進入設備眾多流程嚴格的測試現(xiàn)場的問題。解決數(shù)據(jù)的高速率穩(wěn)定傳輸?shù)膯栴},實現(xiàn)數(shù)據(jù)的實時顯示及歷史數(shù)據(jù)儲存。
該方案為衛(wèi)星提供了性能穩(wěn)定可靠的回波模擬器控制效果,有助于靈活方便的對設備進行遠程控制和效果查看。該方案對于衛(wèi)星設備的遠程操作提供了一個較為完善的解決方案。