船舶中壓岸電電纜力矩控制策略
2018-10-22 03:46:12鄒明雷
船電技術 2018年9期
鄒明雷
?
船舶中壓岸電電纜力矩控制策略
鄒明雷
(武漢南華工業設備工程股份有限公司,武漢 430223)
為克服潮汐、波浪、以及裝卸貨等復雜環境和工況對供電穩定性的影響,提高復雜環境下的船舶中壓岸電供電的安全性和可靠性,通過分析中壓電纜在不同工況下的受力情況,提出了基于模糊PID的船舶中壓電纜的力矩控制策略。結果表明,通過所設計的控制策略可實現船舶在外界復雜環境干擾的情況下,仍能維持中壓電纜的力矩平衡,從而保證供電的安全性和可靠性。
中壓岸電系統 力矩控制 控制策略
0 引言
近年來,隨著國內外對到港船舶噪聲、NOx和SOx排放指標要求的不斷加強[1-3],大型船舶紛紛開始配置中壓岸電系統,在靠港時采用岸電供電,達到節能、減排、環保的目的。我國對中壓岸電的使用目前還處于一個不斷完善的過程,中壓系統[4]、變電技術[5]、船岸并網[6,7]、船岸通信都已相對成熟,但在船岸中壓電纜力矩自動控制方面還相對薄弱。其主要問題是在潮汐、波浪、以及裝卸貨等復雜環境和工況條件下,依靠經驗力矩給定,存在適應性不強、可能造成電纜張力過大、過小等問題。因此,為使得船舶在外界環境復雜干擾的情況下仍能維持中壓電纜的力矩平衡,保證供電的安全性,通過分析中壓電纜的受力情況,提出了船舶中壓電纜的力矩控制策略。
實際操作表明,船岸電纜相連時,電纜臥地部分越長,在插頭上的拉力就越小。因此,通過張力控制,確保船舶臥地電纜在復雜條件下能夠始終保持在一個指定的長度范圍內,即維持電纜的力矩平衡是本文討論的關鍵。
1 中壓電纜受力分析
1.1 電纜平面坐標系
坐標原點O為電纜臥地部分與懸線部分交點,設電纜卷車與電纜切點的張力為1,坐標原點O處的水平張力為o,電纜卷車至港口地面高度為,放出長度為,臥地部分為1,電纜單位長度自重為;建立了如圖1所示的坐標系。
1.2 受力平衡方程
假設電纜上受力分布均勻,并且忽略風、浪、流等外力對電纜卷車位置的影響,任選懸線部分長度△,其受力如圖2所示。
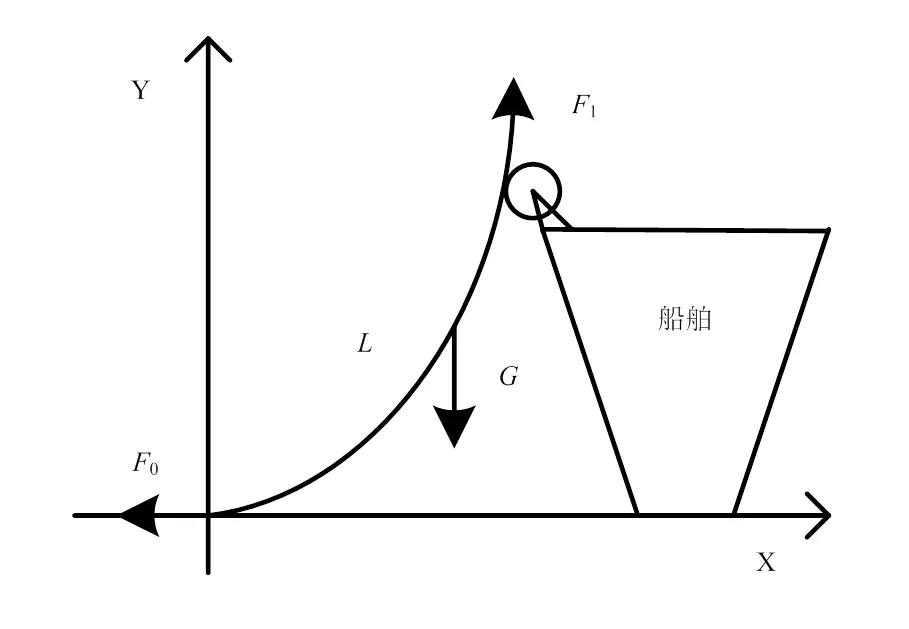
圖1 電纜平面坐標系示意圖

圖2 受力分析示意圖
沿懸線向下張力為,向上為+△,與X軸夾角為,重力為×△。張力和+△為長度的連續函數,在X、Y軸上的投影也為連續函數,通過展開成泰勒級數,并略去二階微量后,可得受力平衡方程式如式(1)所示。
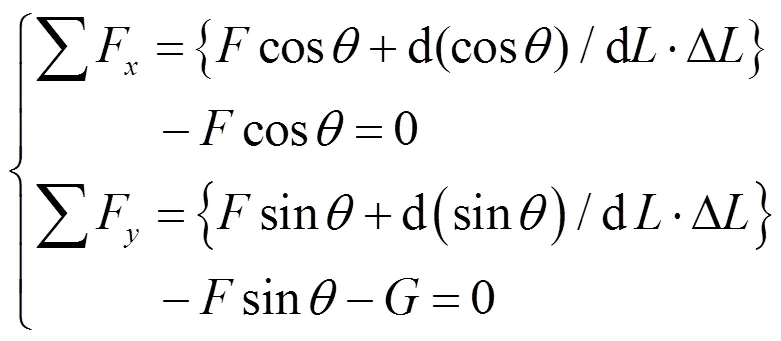
經化簡得:

通過代入、積分后求解可得:
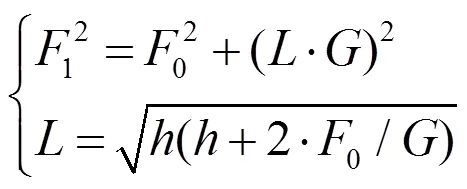
最后可得:

2 電纜長度及卷車力矩
2.1 放出電纜長度的求取
電纜卷車可看作是圓柱形的螺旋線卷曲,相對計算比較簡單,假設電纜全部回收后半徑為,電纜半徑為,累計放出角度為,則可通過求出放出電纜圈數,以及余角;

整理后得:

從而可得半徑為:

2.2 電纜卷車力矩的求取
因懸線電纜與卷車的相交點同時也是其切點;因此可以直接求取卷車力矩,如式(8)所示。

因此,為了維持供電的安全性,需控制電纜卷車力矩的為。當力矩大于時,控制電纜卷車電機正向旋轉,增長所放電纜的長度,從而減少電纜卷車處的力矩;反之亦然。
3 復雜環境對電纜卷車力矩的影響
在以上的分析中,忽略了風、浪、流等外力對電纜卷車位置的影響。實際上,由于風、浪、流等外界復雜環境條件的作用,船舶將會不斷搖擺,從而極大的影響了船舶供電的安全性。此外,船舶在搖擺的過程中,電纜卷車的相對位置和受力方向均會變化,因此所設計的電纜卷車力矩控制策略應能保證在各種復雜環境下,維持其自身力矩的平衡,保證船舶供電的安全性。
對于風速,在港口的一般工作環境條件下,可以通過設定一定的系數來加以修正。而在惡劣環境條件下,則建議采取指定高力矩模式進行控制。為避免在船舶搖擺過程中卷曲控制頻繁動作,因此需要設定一定力矩死區,同時也要確保電纜在左右搖擺止點時,電纜臥地部分仍在可接受的范圍內。
此外,電纜卷車力矩的控制還需考慮卷筒運動摩擦力的影響,摩擦力不受速度的影響,但與負載重量線性相關。因此可以通過現場測試的方法,得出勻速狀態下開卷和全部放出時的對應摩擦力,設定線性直線,對利用以上公式計算的力矩進行修正。
綜上,電纜卷車力矩的控制目標應大于上述計算獲得的,綜合考慮外界復雜環境的影響,需適當的增加力矩為+△,其中,△的確定可通過實際運行數據,采用回歸修正的方式進行確定。
4 電纜力矩控制輸出
本文設計了復雜環境下的船舶中壓岸電電纜力矩控制策略,其控制過程如圖3所示。從圖中可以看出,前文分析計算獲得的修正后的電纜絞車最佳力矩與實際測量的絞車電機的力矩比較后,偏差將輸入模糊PID控制器,通過控制器控制中壓電纜絞車電機的轉向與力矩給定,控制電纜力矩的平衡,避免外界各種復雜的外界條件的干擾,保證岸電電纜的穩定連接,從而提高船舶供電的安全性。

圖3 力矩控制示意圖
圖4 三角形隸屬度曲線
求解出力矩偏差△1及偏差變化率:


歸一化力矩偏差百分比:

應用三角形隸屬度函數對輸入的力矩偏差模糊化。隸屬函數曲線見圖4。PID控制器時域輸出方程為:

對于PID的比例系數,積分時間和微分時間系數,采用最大隸屬度原則及線性反變換方法求取,即:


在重慶港某游輪岸電系統上對本文控制策略進行了測試和應用。岸電系統電纜規格:3×195 mm2,電纜卷車功率30 kW,采用施耐德ATV71變頻器控制,電纜長度最大60 m。在碼頭靠港停泊狀態,5級及以下風力條件下,岸電電纜滯留地面的長度偏差可控制在1 m范圍內,從而有效的控制了船舶電纜的伸縮和船舶的同步,維持了電纜張力的動態平衡,避免了固定張力下高壓電纜可能存在的安全隱患,達到了預期的目標。實船模糊PID控制結果見圖6,設定參數見表7。
表5 控制規則表
KP規則表

EEC NLNMNSZOPCPMPS NLPLPLPMPMPSZOZO NMPLPLPMPSPSZONS NSPMPMPMPSZONSNS ZOPMPMPSZONSNSNM PSPSPSZONSNSNMNM PMPSZONSNMNMNMNL PLZOZONMNMNMNLNL
KI規則表

EEC NLNMNSZOPCPMPS NLNLNLNMNMNSZOZO NMNLNLNMNSNSZONS NSNLNMNSNSZOPSPS ZONMNMNSZOPSPMPM PSNMNSZOPSPSPMPL PMZOZOPSPSPMPLPL PLZOZOPSPMPMPLPL
KD規則表

EEC NLNMNSZOPCPMPS NLPSNSNLNLNLNMPS NMPSNSNLNMNMNSZO NSZONSNMNMNSNSZO ZOZONSNSNSNSNSZO PSZOZOZOZOZOZOZO PMPLNSPSPSPSPSPL PLPLPMPMPMPSPSPL
圖6 實船模糊PID輸出
表7 參數設置表

序號模糊描述 1NL-5-10-3 2NM-3-7-1.6 3MS-1.6-3-0.5 4ZO000 5PS1.6305 6PM371.6 7PL5103
5 結論
針對復雜外界環境條件下,中壓岸電電纜存在張力過大、過小等影響供電安全性和可靠性的問題,通過分析中壓電纜復雜條件下的受力情況,提出了基于模糊PID方法的船舶中壓電纜的力矩控制策略,可使船舶在外界環境復雜干擾的情況下仍能維持中壓電纜的力矩,對保證船舶供電的安全性具有重要意義。
[1] 徐筱云, 劉維里. 中壓岸電AMP系統的安全操作及管理[J]. 航海, 2011, (06): 54-57.
[2] 陳鋼. 開拓岸電技術, 引領綠色水運——連云港岸電技術介紹[J]. 港口科技, 2011, (12): 7-10.
[3] 黃細霞, 包起帆, 葛中雄, 江霞, 顧偉. 典型港口岸電比較及對中國港口岸電的啟示[J]. 交通節能與環保, 2009, (04): 2-5.
[4] 趙文利,陳新. 船舶6600V中壓電力系統及其安全操作[J]. 航海技術, 2010, (01): 53-56.
[5] 浦瑾瑩. AMP系統在船舶和港口碼頭的應用研究[J]. 江蘇船舶, 2013,(06): 23-24.
[6] 袁立軍, 羅寧昭, 劉佳, 丁洪兵. 艦船中壓電力系統岸電供電系統接地方式研究[J]. 船電技術, 2013,(01): 58-60.
[7] 李學文,孫可平. 船舶接用岸電技術研究[J]. 上海海事大學學報, 2006, (03): 10-14.
[8] 王述彥, 師宇, 馮忠緒. 基于模糊PID控制器的控制方法研究[J]. 機械科學與技術, 2011,(01): 166-172.
[9] 丁堅. 模糊PID控制器的研究[D].哈爾濱工程大學, 2009.
[10] 林浩. 模糊PID控制器仿真研究[D].貴州大學, 2006.
[11] 趙永娟, 孫華東. 基于Matlab的模糊PID控制器的設計和仿真[J]. 微計算機信息, 2009, (01): 48-49.
[12] 屈毅, 寧鐸, 劉飛航, 郭飛飛. 模糊PID控制器的設計及其仿真[J]. 計算機仿真, 2009,(12): 130-132+176.
Research on the Torque Control Strategy of Marine MV Shore Cable
Zou Minglei
(Wuhan Nanhua Industrial Equipment Engineering Co., Ltd, Wuhan 430223, China)
TM81
A
1003-4862(2018)09-0031-04
2018-05-07
鄒明雷(1978-),男,工程師。研究方向:船舶電站及自動化。Email: zouml@whnhi.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國船檢(2017年3期)2017-05-18 11:33:09
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
