無人機航線跟隨控制方案設計與實現
2014-09-03 23:11:38韓泉泉陳知秋田雪濤劉豐沛
電子設計工程 2014年11期
關鍵詞:分析
韓泉泉,陳知秋,田雪濤,劉豐沛
(1.西安愛生技術集團公司 陜西 西安 710065;2.西北工業大學 航天學院,陜西 西安 710072;3.94795部隊86分隊 安徽 蕪湖 241007)
無人機航線跟隨控制方案設計與實現
韓泉泉1,陳知秋2,田雪濤1,劉豐沛3
(1.西安愛生技術集團公司 陜西 西安 710065;2.西北工業大學 航天學院,陜西 西安 710072;3.94795部隊86分隊 安徽 蕪湖 241007)
無人機能夠執行的任務已經多樣化,要求其航線設計不再是點與直線。分析了無人機目前航線跟隨的2種控制律,分析了其優缺點。提出了一種基于Serret-Frenet二維坐標系方案設計的航線跟隨控制律,并進行了穩定性分析和仿真驗證,同時在實驗飛行中得以實現。經過仿真及實飛驗證,此方案有良好的航線跟隨性能。
無人機;航線跟隨控制;Serret-Frenet;導航控制律
自主導航控制飛行是無人機在無線電視距之外,或者其在無線電靜默條件下飛行時需要使用的一種功能。自主導航控制的方式通常是要求無人機按照預設的航線以及航線編號順序,在符合導航和定位誤差范圍內的航線走廊上飛行。航線跟隨控制要求會因無人機上的任務載荷變化有相應的調整。例如偵察或者測繪型的無人機會因機載光電攝像平臺的視場范圍調整拍攝區“掃雪式”航線的間距,而電子戰無人機則通常會采取對輻射目標源大半徑“繞圈式”飛行或者距目標源較遠的地點長時間“跑道式”飛行[1]。
目前國內大部分無人機現狀為:低速飛行,航程較近,機上傳感器測量種類與精度有限,航線設計與規劃方式簡單(即采用航路點編號加航路點坐標的直線段規劃模式)。從無人機性能與應用范圍看,用彎曲航線規劃與航線跟隨控制將成為一種趨勢,而此類實例及相關文獻資料并不多見,本文通過分析目前無人機航線跟隨控制律的設計存在的優劣性,提出了一種基于Serret-Frenet二維坐標系[2]方案設計的航線跟隨控制律,并進行了穩定性分析,同時在仿真驗證與試驗飛行中得以實現。
1 傳統航線跟隨控制的實現方法及分析
1.1 比例控制方式

航路跟隨控制多采用位置誤差的線性化控制律如比例控制或比例-微分控制律來設計[3-5]。無人機常用的導航控制方案是導航算法與飛行控制算法獨立運行,導航算法軟件如同飛行員判定航線方位與航線偏差,按飛機飛行能力的要求給出質點運動的方案,而飛行控制算法軟件依據導航算法給定的質點運動方案給出舵面偏轉量以改變飛機姿態,最終使無人機沿預設航線運動。

航線跟蹤比例控制律設計方案為:
1)根據當前預設航線斜率計算航線目前方向角:ψL;
2)根據航跡偏差計算航向調整參量ψm=-kmd;
3)將ψm整定在[-90°, 90°] ,超過限幅即給定最大值即可;
4)計算給定飛機的航向 ψd=ψL+ψm;
5)將ψd整定在[0°, 360°] 之間。
由此方向舵控制參數中的給定量ψd就可得到,依據ψd也可給出給定滾轉角 γd=kdψd。
這種比例控制的在飛行速度不高,航線為直線折線的情況下能較好的沿預設線段飛行,但在有強陣風變化影響下超調量會較大,因為控制參量中沒有包含速度的影響。
1.2 比例-微分控制方式

這種控制方案在速度較高的飛行器上能夠較好的降低航線跟蹤中超調和震蕩,但這種控制方式仍然無法解決曲線航路跟隨的問題。


函數圖像如圖2所示,式中α為可調參數。
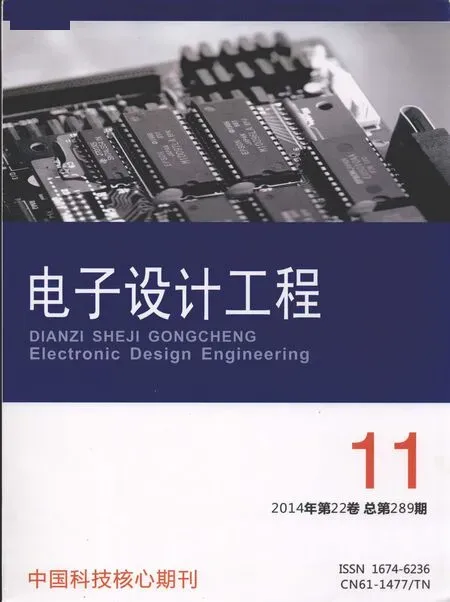
若無人機系統采用協調轉彎,且能保證合成速度(即地速)方向始終保持在機體對稱面內,即航向角與偏航角重合:
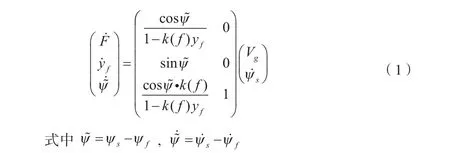
2 基于Serret-Frenet坐標系的航路跟隨方案


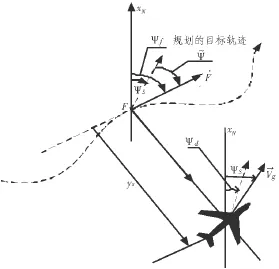
圖1 Serret-Frenet 坐標系下的航路跟蹤Fig. 1 Path following with Serret-Frenet coordinate
圖2函數圖像形式Fig. 2 Image of

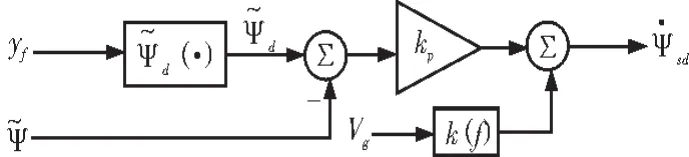
圖3 航線跟蹤控制律結構圖Fig. 3 Path following control law demonstration
3 導航控制律的設計及穩定性分析
其中Tγ時間常數,γd為給定滾轉角控制量
3.1 航線為直線條件下的穩定性分析

那么航向角速率與滾轉角控制量之間的傳遞函數可表示為:+

k f V = g? ~ψ k()s
0(.ψ . Δ.ψ ψ
d ds
=? +
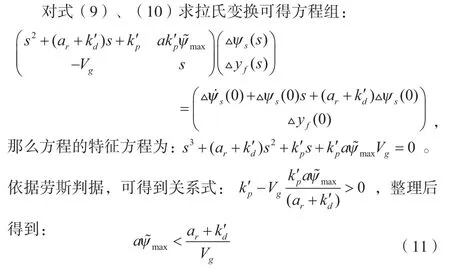

k代入后能滿足(11)式的要求,說明該導航控制律在跟蹤直航線的情況下收斂且穩定。
3.2 航線為曲線條件下的穩定性分析



采用與直線相同的方法,進行穩定性分析得到如下關系式:

這與式(11)只相差一個k'd,因此可以證明該導航控制律在跟蹤彎曲航線的情況下收斂且穩定。
4 仿真驗證
在已搭建好的仿真模擬平臺上考核控制律穩定跟隨航線能力,分別在直線和曲線航線上進行試驗,結果如圖4~圖5所示。其中,圖4為仿真無人機沿南北直線飛行的航跡偏差響應情況;圖5為仿真無人機在以2 km為半徑的圓上進行跟隨曲線飛行的航跡偏差響應情況。仿真驗證表明,本控制律能對直線及曲線航線穩定跟蹤。
5 飛行試驗
在某型無人機上裝載本航線跟蹤算法進行實裝飛行,分別在直線和曲線航線上進行試驗,結果如圖6~圖7所示。其中,圖6為無人機沿南北直線往返飛行的航跡偏差響應情況;圖7為無人機跟隨設定以3 km、3.5 km和4 km為半徑進行同心圓飛行的航跡偏差響應情況。飛行試驗表明,本控制律能對直線及曲線航線穩定跟蹤,在實際飛行有陣風的情況下,有較好的抗擾動能力。
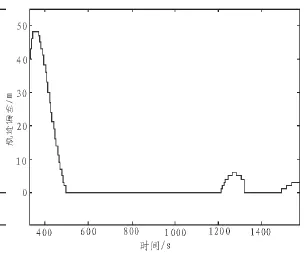
圖4 仿真跟隨直線航跡偏差響應情況Fig.4 Response of the tracking error for following straight line on Simulation
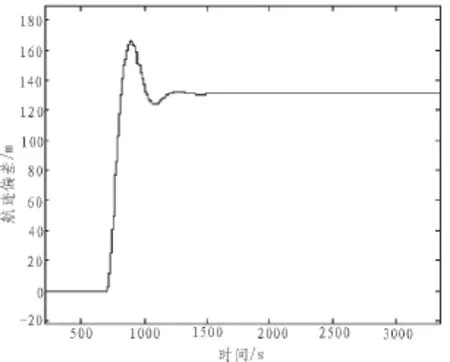
圖5 仿真跟隨曲線航跡偏差響應情況Fig.5 Response of the tracking error for following curve on Simulation

圖6 實飛跟隨直線航跡偏差響應情況Fig.6 Response of the tracking error for following straight line
6 結 論
文中通過分析目前常用的兩種航線跟隨控制律存在的優劣性,提出了一種基于Serret-Frenet二維坐標系方案設計的航線跟隨控制律,該方法的設計基于航線為曲線的情況,控制律設計經穩定能力定性分析,同時在仿真和實際飛行試驗中得以驗證,證明此方案有良好的航線跟隨性能。
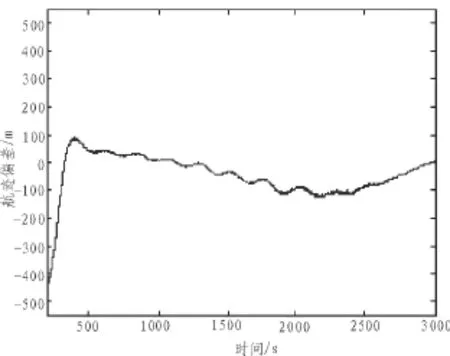
圖7 實飛跟隨曲線航跡偏差響應情況Fig.7 Response of the tracking error for following curve
[1] 陳知秋,羅建軍,彭新潮,等.無人機對輻射源定位方法精度分析與控制策略[J].測控技術,2012,31(4):67-72.
CHEN Zhi-qiu,LUO Jian-jun,PENG Xin-chao,et al.An accuracy analysis and control strategy on emitter geolocation method for UAV[J].Measurement &Control Technology,2012,31(4):67-72.
[2] Rysdyk R,Lum C and Vagners J.Autonomous orbit coordination for two unmanned aerial vehicles[C]//in AIAA Guidance,Navigation and Control Conference,2005:4876-4884.
[3] Breivik M,Fossen T I.Principles of guidance-based path following in 2D and 3D[C]//Proc.of the 44th IEEE Conference on Decision and Control,and the European Control Conference,2005:627-634.
[4] Wang B,Dong X X,Chen B M.Cascaded control of 3D path following for an unmanned helicopter[C].Proc.of the IEEE Conference on Cybernetics and Intelligent Systems,2010:70-75.
[5] 李朝旭,劉忠,尹暉.多無人機協同運動的虛擬隊形制導控制[J].系統工程與電子技術,2012,34(6):1220-1224.
LI Chao-xu,LIU Zhong,YIN Hui.Cooperative motions control method guided by virtual formations for multi-UAVs[J].Systems Engineering and Electronics,2012,34(6):1220-1224.
[6] 黃一敏,孫春貞.小型無人機姿態回路的簡化配控制系統設計[J].南京航空航天大學學報,2003,35(2):189-192.
HUANG Yi-ming,SUN Chun-zhen.Minimum-Sensor Attitude Control System for UAV[J].Journal of Nanjing University of Aeronautics & Astonautics,2003,35(2):189-192.
[7] Rysdyk R.UAV path following for constant line-of-sight[C]//In 2nd AIAA Unmanned Systems Conference,San Diego,CA,September 2003.
Design and implementation of a UAV path following control algorithm
HAN Quan-quan1,CHEN Zhi-qiu2,TIAN Xue-tao1,LIU Feng-pei3
(1.Xi'an ASN Technology Group Company,Xi'an 710065,China;2.School of Astronautics,Northwestern Polytechnic University,Xi'an 710072,China;3.94795 PLA forces of 86 Units,Wuhu 241007,China)
As the multiple types of the tasks for the UAVs,the elements of the planned paths are no longer limited to waypoints and line segments.This paper analyzed two widely used guide laws for the UAV path following,including their advantages and disadvantages.A path following guide law based on Serret-Frenet 2-D coordinates is proposed.Its stability analysis and verification is provided.The experimental flight of the proposed guide law is also applied.By the simulations and flight experiments,the guide law shows good path following performance.
unmanned aerial vehicle(UAV);path following control;serret-Frenet;guide law
TN96;V279
A
1674-6236(2014)11-0001-04
2014-04-09 稿件編號:201404078
國家自然科學基金資助項目(61074155)
韓泉泉(1982—),男,陜西西安人,碩士,工程師。研究方向:地面指揮控制與定位導航。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06