基于SVDI的變工況旋轉機械故障診斷方法
2018-10-20 02:13:46王瑜琳趙明富鐘年丙
振動與沖擊 2018年19期
宋 濤,王瑜琳,趙明富,鐘年丙
(1.光纖傳感與光電檢測重慶市重點實驗室,重慶 400054; 2.重慶理工大學 電氣與電子工程學院,重慶 400054; 3.重慶公共運輸職業學院重慶 402247)
振動信號因其信息豐富,能很好的反映旋轉機械設備的運行狀態而成為旋轉機械設備故障診斷中最常用的信號源[1-2]。基于振動信號的智能故障診斷其一般模式為:構建故障樣本庫-實測振動信號-特征提取-模式識別。該模式需要收集不同故障的信號作為樣本,然后通過特征提取、模式識別判斷待測信號的故障類別。如果機械設備工作在平穩工況下(即恒速恒載),該方法比較可行,已取得廣泛應用,并有較好的故障識別效果[3-5]。但在一些旋轉機械設備實際的工作中,非平穩工況不僅非常常見[6-7],且具有比平穩工況更強的破壞性,更容易產生故障。由于振動信號在不同工況下的特征不一致,上述故障識別模式存在較大的局限性,變工況下的故障識別存在極大困難。
針對變工況的旋轉機械設備,有學者提出基于靜電監測方法對變工況下的滾動軸承進行故障診斷[8],但該方法傳感器復雜,安裝困難,成本較高。更多學者基于振動信號時頻分析研究變工況旋轉機械故障診斷方法,以降低振動信號特征與速度工況的關聯性。如希爾伯特變換[9-10]、階比跟蹤[11-12]、Kalman濾波[13]等。但這一類分析方法一方面計算相當復雜、比較耗時,另一方面更多依據經驗進行人工分析,難以實現自動特征提取和后續的模式識別。另一種思路是構建完備樣本庫,即收集所有工況下的各種故障信號,故障診斷時根據實際運行工況選擇相應工況下的信號作為樣本進行模式識別。而事實上,該模式實現難度和代價非常大,因為工況通常是在一定范圍內連續任意變化的,很難構建完備樣本庫。
針對變工況下故障診斷存在的上述難題,本文提出一種基于奇異值分解插值(Singular Value Decomposition Interpolation,SVDI)算法[14]的變工況下旋轉機械設備故障診斷方法。該方法的思路為:在旋轉機械設備運行工況的范圍內,采集多種離散工況下的故障信號構建非完備樣本庫。故障診斷過程中,根據實際運行工況,利用樣本庫中與實際工況最接近的前后多種(四種)離散工況下的信號作為原始樣本,對其進行特征提取,并采用SVDI方法對其進行擬合插值,估計出實際工況下故障特征值作為故障診斷的訓練樣本,再采用模式識別方法進行故障診斷。變轉速下齒輪箱故障診斷的實例表明該方法的有效性。
1 SVDI算法原理

X(γ)=[x1(γ)x2(γ)…xj(γ)…xn(γ)]
(1)
xj(γ)∈Rm×1表示工況α(γ)下某種故障的第j組特征向量。如果能在工況范圍內獲得任意工況下的樣本數據,即構建完備樣本庫,將能獲得很高的識別精度。但實際上,運行過程中的轉速和負載可能是工況范圍內任意變化的連續值,無法獲得所有工況的樣本數據,但可以獲得多種工況下的樣本數據。假設獲得樣本的運行工況集合為
Γ={γ1,γ2,…,γl},γ1<γ2<…<γl
(2)
所有這些特征矩陣構成特征矩陣集合表示為
Z={Xγ1,Xγ2,…,Xγl}
(3)

(4)
用Xγ的協方差矩陣Cγ描述特征矩陣Xγ的形狀和方向,Cγ如式(5)所示
(5)

(6)

σγ,1≥σγ,2≥…≥σγ,r
σγ,r+1=σγ,r+2=…=σγ,p=0
(7)
將式(6)代入式(5)得
(8)
該式為協方差矩陣Cγ的奇異值分解。由式(8)可以看出如果已知Uγ、Σγ和n,那么Cγ可計算出來。協方差矩陣Cγ表示點云Xγ的形狀和方向,進一步可以看出左奇異矩陣Uγ代表了特征空間Xγ的方向,Σγ控制Xγ的尺寸。

(1)基于樣條法的均值插值

(-2t3+3t2)xγk+1+(t3-t2)ρk+1
(9)

(10)
ρk是用于決定樣條方向的切向量,ρk有多種定義方式,最常用的定義方式是基數樣條,定義如下
(11)
其中c是張力參數,用于控制切向量的長度,如果c=0,ρk則退化為Catmull-Rom樣條
(12)
(2)Uγ和Vγ估計

(13)
其中t∈(0,1),
(14)
(15)

(16)



(17)

(18)

2 基于奇異值分解插值算法的變速工況下故障診斷流程
基于SVDI算法的旋轉機械設備變速工況故障診斷方法流程如圖1和圖2所示(此處以變轉速為例)。
具體步驟如下。
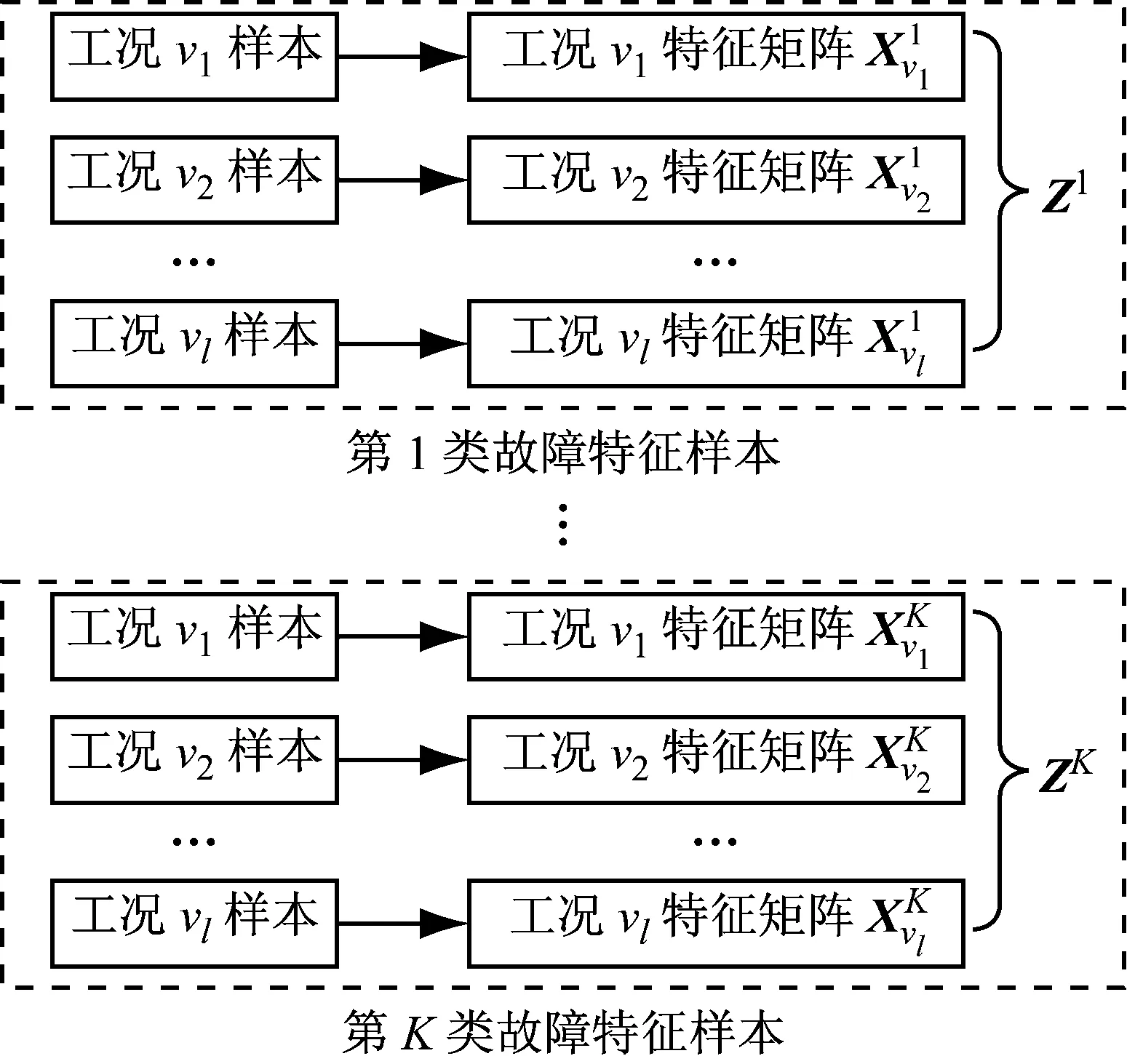
圖1 樣本庫構建Fig.1 Sample library construction
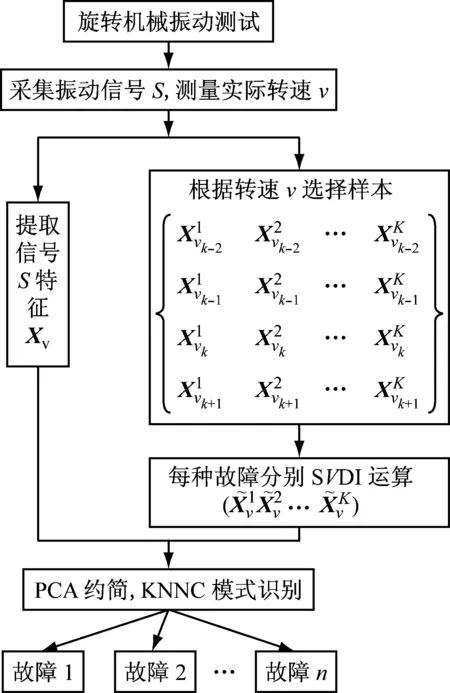
圖2 基于奇異值分解插值算法的變速工況下故障診斷流程Fig.2 Fault diagnosis process under variable condition based on SVDI algorithm

步驟2 實測旋轉機械設備振動信號S,并測量其轉速v,提取信號S的振動特征Xv。如果v∈Γ,即樣本庫中有對應工況的樣本信號,無需進行SVDI運算,此文不贅述。


3 變速情況下的旋轉機械故障診斷應用
應用美國預測與健康管理協會提供的多種速度工況下齒輪箱故障振動數據進行故障診斷測試。該測試中所用齒輪箱結構如圖3所示。圖中32T、96T、48T、80T分別為輸入軸齒輪、中間軸齒輪1、中間軸齒輪2、輸出軸齒輪,IS、ID、OS分別指輸入軸、中間軸、輸出軸。
齒輪箱由輸入端至輸出端經過兩級減速,在齒輪箱輸入軸和輸出軸分別安裝一個振動加速度傳感器同步采集振動加速度信號,型號為Endevco(10 mv/g),同時安裝一個轉速計采集轉速信號,分辨率為10脈沖/轉。三個傳感器的采樣頻率均為66 666.67 Hz (200 kHz/3)。
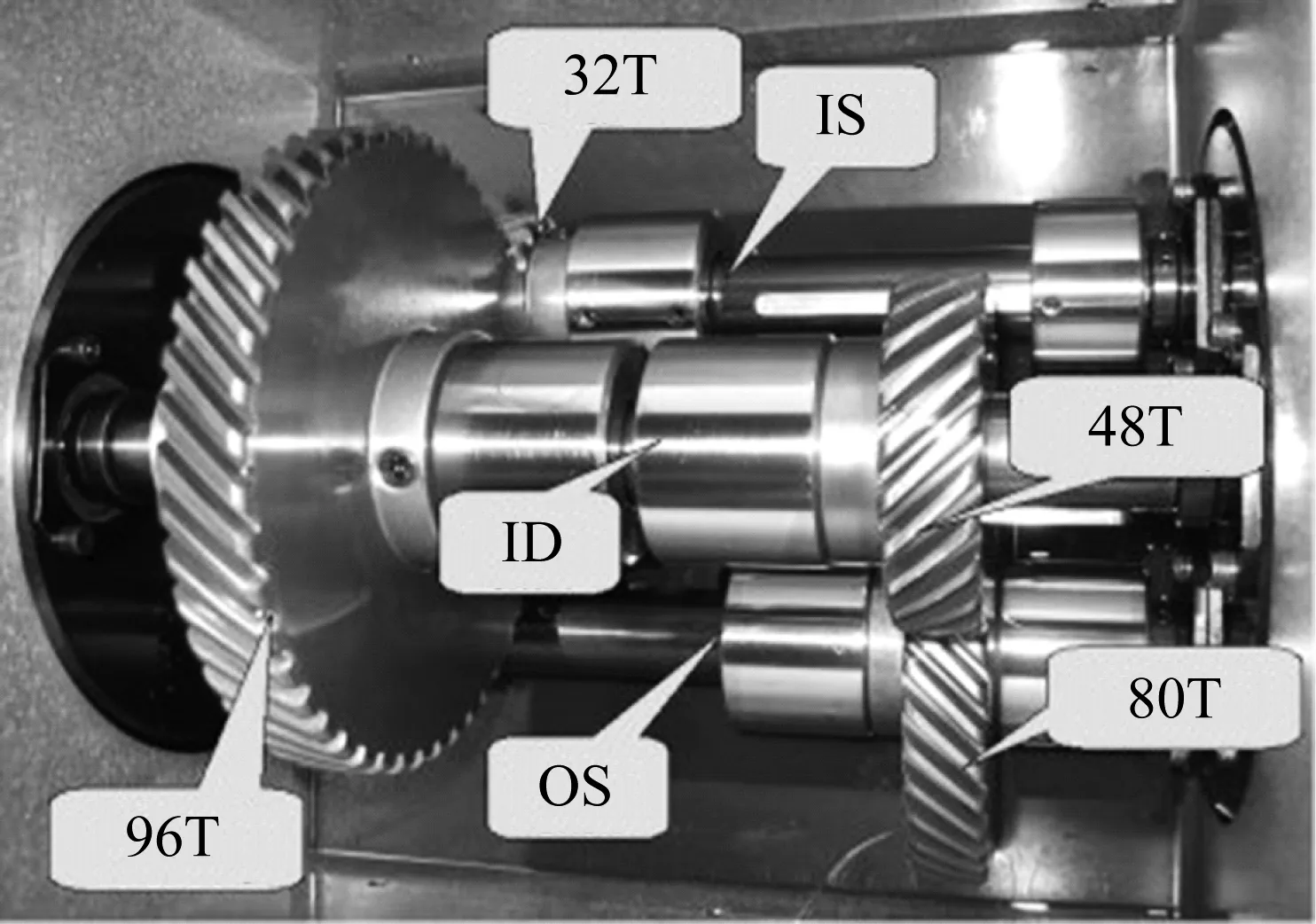
圖3 齒輪箱結構圖Fig.3 The structure of gearbox
該齒輪箱共采集了8種狀態下的數據,包括正常狀態和7種故障狀態,每種故障可能是單一零部件故障或者復合故障。本實驗取其中五種正常/故障狀態進行測試,五種狀態下各零部件對應的正常/故障狀態如表1所示。表中IS:IS、ID:IS、OS:IS分別表示輸入軸、中間軸和輸出軸的輸入端軸承。

表1 齒輪箱故障狀態Tab.1 The fault status of gearbox
該試驗臺每種故障數據分別在5種不同的轉速下采集獲得,分別為輸入軸轉速1 800 r/min(30 Hz)、2 100 r/min(35 Hz)、2 400 r/min(40 Hz)、2 700 r/min(45 Hz)、3 000 r/min(50 Hz)。本實驗以輸入軸30 Hz、35 Hz、45 Hz、50 Hz四種轉速下的振動數據作為訓練樣本,以輸入軸轉速40 Hz的數據作為測試樣本。上述5種速度工況下的故障1對應的振動信號時域波形如圖4所示。
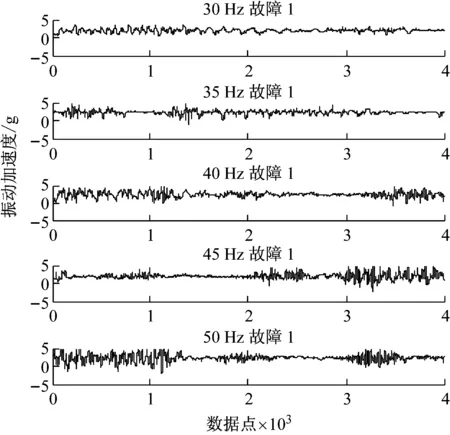
圖4 五種速度工況下的故障1對應的振動信號時域波形Fig.4 The vibration signal waveform of fault 1 under five speed conditions
將30 Hz、35 Hz、45 Hz、50 Hz四種轉速下每種正常/故障狀態的振動數據各取50組作為訓練樣本,樣本長度為4 096點,每組數據分別提取時域、頻域特征,見文獻[15]。將40 Hz轉速下的每種狀態的振動數據各取50組作為測試樣本,長度為4 096點。并提取其時域、頻域特征。樣本的構建和樣本數如表2所示。
顯然訓練樣本中不包含測試樣本所屬的工況,因此,這里采樣SVDI算法,利用30 Hz、35 Hz、45 Hz、50 Hz四種轉速下的樣本特征估計出40 Hz轉速下的樣本特征。
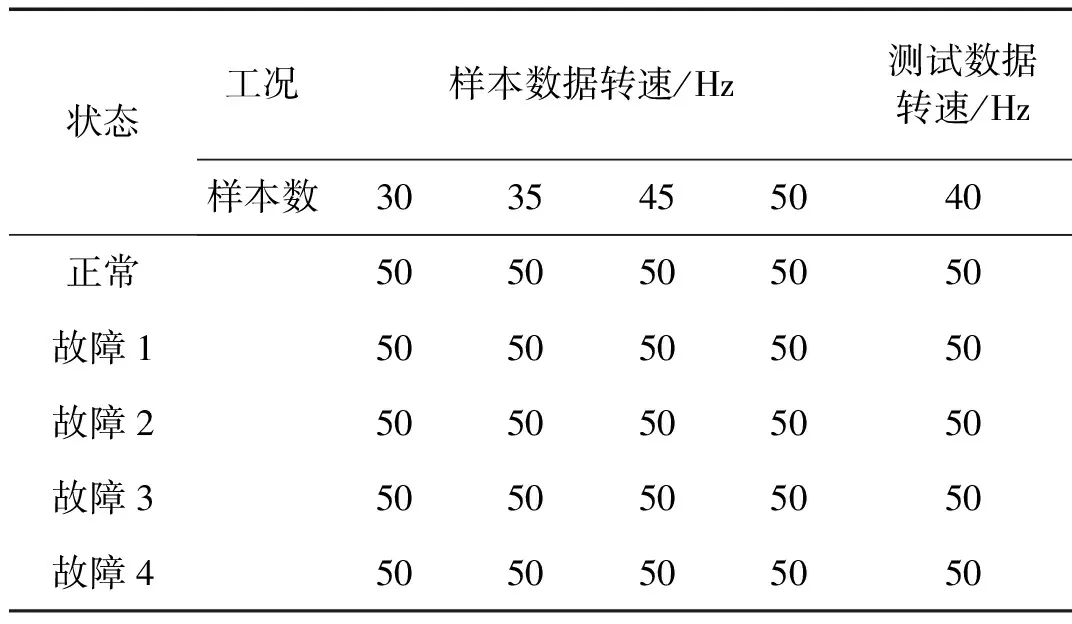
表2 樣本構建表Tab.2 Sample construction table
以該估計值作為訓練樣本,并采用PCA方法將時頻域特征23維高維特征值降低至8維,降維后的特征分布如圖5所示(取其前三維繪制),可以看出測試樣本特征在空間分布上與相應正常/故障狀態下的訓練樣本非常接近,反而,如果訓練樣本和測試樣本不一致,其特征值在空間分布上將呈現分離現象。
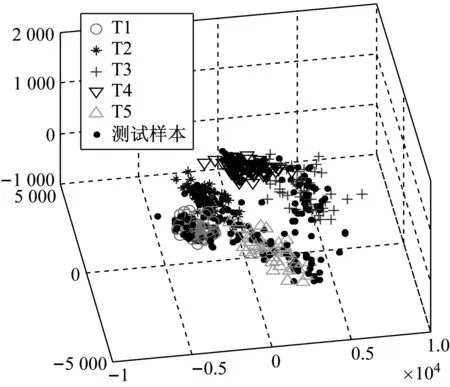
圖5 樣本特征空間分布圖Fig.5 The space distribution of sample characteristics

圖6 測試樣本模式識別輸出Fig.6 The pattern recognition output of test samples
最后采用簡單實用的k-近鄰分類器對測試樣本進行分類,近鄰分類器鄰域大小設置為20,五種正常/故障狀態的分類輸出分別設置為:正常->1、故障1->2、故障2->3、故障3->4、故障4->5,五種正常/故障狀態共250組測試樣本的輸出如圖5所示,其中圓圈標注的是誤識別樣本,共計18組樣本識別錯誤,識別率高達92.8%。
為了對本方法進行比較,實驗中取30 Hz、35 Hz、40 Hz、45 Hz、50 Hz五種轉速下的振動數據分別作為訓練樣本,并以40 Hz轉速下的振動數據作為測試樣本,每種狀態識別率以及本文方法的識別率如表3所示。可以看出,如果樣本庫中有對應工況的樣本,則識別率最高,這種情況通常在變工況運行的設備中難以滿足。如果樣本庫中沒有對應工況的樣本,而選擇其它工況的數據作為樣本,識別率將急劇降低,工況差異越大,識別率越低。而采用文本的SVDI方法,估計出對應工況的特征樣本,將有效提高故障診斷識別率。

表3 故障診斷結果對比Tab.3 Comparison of fault diagnosis results
4 結 論
變速運行下的旋轉機械設備由于無法獲取完備樣本庫而導致故障診斷困難,奇異值分解插值算法只需采集多種離散工作下的信號構建不完備樣本庫,利用離散工況下的樣本數據提取特征矩陣,并將特征矩陣分解為能代表特征矩陣空間位置、形狀和方向的均值向量、奇異值、左右奇異矩陣,再利用插值算法估算出待測工況下的均值向量、奇異值矩陣、左右奇異矩陣,并重構待測工況下的特征矩陣作為訓練樣本,最后對同工況下的訓練樣本和測試樣本采用模式識別算法進行故障診斷。該算法針對旋轉機械設備運行工況范圍內的任意時變工況都能有效地對其進行故障診斷。多種轉速工況下的齒輪箱故障診斷實例表明了該方法的有效性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31