下肢康復(fù)訓(xùn)練伺服系統(tǒng)建模與模糊自整定PID控制
2018-10-12 05:48:38李彩鳳楊風(fēng)
現(xiàn)代電子技術(shù) 2018年19期
關(guān)鍵詞:仿真
李彩鳳 楊風(fēng)
摘 要: 為提高下肢康復(fù)訓(xùn)練伺服系統(tǒng)的控制精度,將模糊控制理論和PID控制結(jié)合起來(lái),提出適合下肢康復(fù)訓(xùn)練伺服系統(tǒng)的模糊自整定PID控制算法。在說(shuō)明系統(tǒng)結(jié)構(gòu)的基礎(chǔ)上建立模型,詳細(xì)描述模糊自整定PID控制器的原理及設(shè)計(jì)過程。仿真結(jié)果表明,相對(duì)于常規(guī)PID法,模糊自整定PID法能夠使下肢康復(fù)訓(xùn)練伺服系統(tǒng)達(dá)到良好的控制效果,輸出響應(yīng)時(shí)間縮短并且大大提高了擾動(dòng)穩(wěn)定性,具有較好的實(shí)際應(yīng)用前景。
關(guān)鍵詞: 下肢康復(fù)訓(xùn)練; 伺服系統(tǒng); 模糊控制; PID; 仿真; 系統(tǒng)建模
中圖分類號(hào): TN876?34; TP242 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2018)19?0129?04
Abstract: A fuzzy self?tuning PID control algorithm suitable for the lower limb rehabilitation training servo system is proposed by combining the fuzzy control theory with PID control to improve the control precision of the lower limb rehabilitation training servo system. The model of the system is established on the basis of the description of the system structure, and then the principle and design process of the fuzzy self?tuning PID controller are described in detail. The simulation results show that, in comparison with the conventional PID method, the fuzzy self?tuning PID method can get more perfect control effect for lower limb rehabilitation training servo system, shorten the output response time, improve the disturbance stability, and has the wider practical application prospect.
Keywords: lower limb rehabilitation training; servo system; fuzzy control; PID; simulation; system modeling
0 引 言
由于下肢康復(fù)訓(xùn)練機(jī)器人伺服系統(tǒng)的重要醫(yī)用價(jià)值,對(duì)其研究已成為國(guó)際機(jī)器人研究領(lǐng)域的一個(gè)熱點(diǎn)[1]。下肢康復(fù)訓(xùn)練機(jī)器人是一種高度智能的機(jī)器人伺服系統(tǒng),具有環(huán)境感知、行為控制和執(zhí)行、動(dòng)態(tài)決策和規(guī)劃等功能[2]。運(yùn)動(dòng)控制是其最基本,也是非常重要的一環(huán)。在傳統(tǒng)控制領(lǐng)域,由于PID控制器具有結(jié)構(gòu)簡(jiǎn)單且使用方便的特點(diǎn)經(jīng)常被使用。而下肢康復(fù)訓(xùn)練伺服系統(tǒng)對(duì)精度要求較高,簡(jiǎn)單地使用PID控制很難達(dá)到其目的。模糊控制適用于非線性、參數(shù)變化大、強(qiáng)耦合,難以獲得精確數(shù)學(xué)模型的控制系統(tǒng)[3]。如果將PID控制和模糊控制兩種方法結(jié)合起來(lái)進(jìn)行互補(bǔ),使得PID具有在線整定參數(shù)的功能,便能較好解決高精度下肢康復(fù)訓(xùn)練伺服系統(tǒng)控制問題。目前,這種結(jié)合在康復(fù)訓(xùn)練伺服系統(tǒng)控制中的研究和成果并沒有廣泛應(yīng)用,下面就這一方法的具體實(shí)施進(jìn)行仿真分析研究。
1 下肢康復(fù)訓(xùn)練伺服系統(tǒng)的結(jié)構(gòu)及模型
1.1 伺服系統(tǒng)的結(jié)構(gòu)
下肢康復(fù)訓(xùn)練機(jī)器人伺服系統(tǒng)控制回路由位置控制器、速度控制器、驅(qū)動(dòng)器、伺服電機(jī)以及機(jī)械傳動(dòng)機(jī)構(gòu)組成,結(jié)構(gòu)框圖如圖1所示。驅(qū)動(dòng)電機(jī)為Maxon公司的RE25伺服電機(jī),驅(qū)動(dòng)器選擇RMDS?107直流伺服電機(jī)驅(qū)動(dòng)器,采用編碼器作為位置、速度檢測(cè)元件的雙閉環(huán)伺服系統(tǒng)。由[PS]給出伺服電機(jī)的位置設(shè)定值,由編碼器采集實(shí)時(shí)位置,模糊PID控制器的輸出通過串口與下位機(jī)通信,驅(qū)動(dòng)器接收命令驅(qū)動(dòng)伺服電機(jī)。
1.2 整體數(shù)學(xué)模型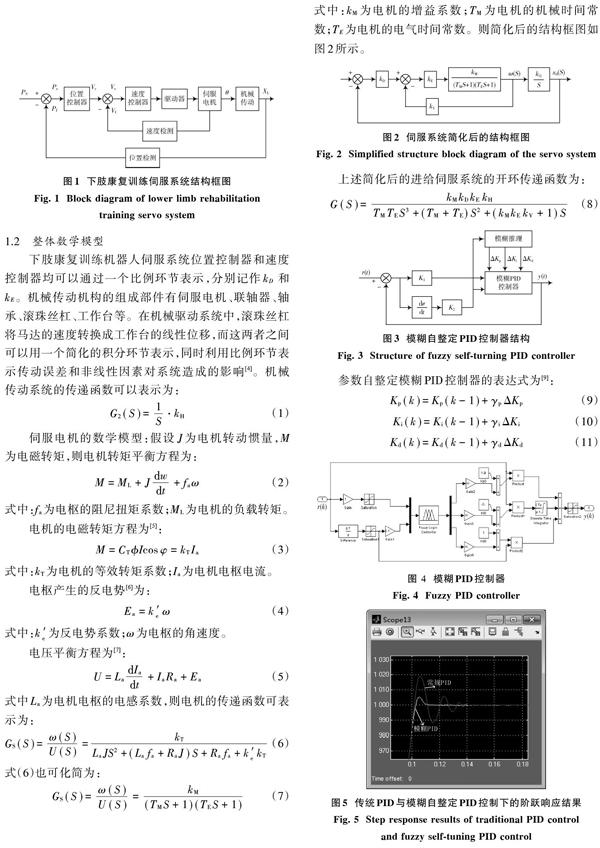
下肢康復(fù)訓(xùn)練機(jī)器人伺服系統(tǒng)位置控制器和速度控制器均可以通過一個(gè)比例環(huán)節(jié)表示,分別記作[kD] 和[kE]。機(jī)械傳動(dòng)機(jī)構(gòu)的組成部件有伺服電機(jī)、聯(lián)軸器、軸承、滾珠絲杠、工作臺(tái)等。在機(jī)械驅(qū)動(dòng)系統(tǒng)中,滾珠絲杠將馬達(dá)的速度轉(zhuǎn)換成工作臺(tái)的線性位移,而這兩者之間可以用一個(gè)簡(jiǎn)化的積分環(huán)節(jié)表示,同時(shí)利用比例環(huán)節(jié)表示傳動(dòng)誤差和非線性因素對(duì)系統(tǒng)造成的影響[4]。機(jī)械傳動(dòng)系統(tǒng)的傳遞函數(shù)可以表示為:
2 模糊自整定PID控制器
2.1 模糊PID控制器原理結(jié)構(gòu)
速度控制器是下肢康復(fù)訓(xùn)練伺服機(jī)構(gòu)的關(guān)鍵部件,由于傳統(tǒng)的PID調(diào)節(jié)器不具有在線調(diào)整參數(shù)的功能,因此不能達(dá)到良好的控制效果。所以將模糊控制和PID相組合以產(chǎn)生模糊自整定PID控制器,輸入為偏差[E]和偏差變化率[EC],PID參數(shù)可以通過模糊控制理論在線校正,從而滿足不同時(shí)刻偏差和偏差變化率對(duì)PID參數(shù)自整定的要求[8]。整體結(jié)構(gòu)如圖3所示。
2.2 模糊PID控制器設(shè)計(jì)
2.2.1 確定各變量的隸屬度函數(shù)
通過分析系統(tǒng)要求,模糊控制器采用二輸入三輸出的形式。控制器的輸入為誤差[E]和誤差變化率[EC],輸出為3個(gè)參數(shù)P,I,D校正值[ΔKp],[ΔKi],[ΔKd]。確定輸入[E,EC]及輸出[ΔKp],[ΔKi],[ΔKd]變量語(yǔ)言值的模糊子集都為{NB,NM,NS,ZO,PS,PM,PB},子集中的元素依次代表負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大。其在模糊集上的論域均為[[-6,6]]。在模糊邏輯工具箱中,控制器輸入[E,EC]的隸屬度函數(shù)選擇高斯函數(shù),輸出[ΔKp],[ΔKi],[ΔKd]的隸屬度函數(shù)選擇三角函數(shù)。
猜你喜歡
中國(guó)教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價(jià)值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
