面向空間在線分析的并行近似聚集查詢*
2018-10-12 02:19:34申金鑫
計算機與生活 2018年10期
關鍵詞:方法
申金鑫,吳 燁,陳 犖,景 寧
國防科技大學 電子科學學院,長沙 410073
1 引言
信息化世界里,人人都是移動的數據“生產者”。隨著基于位置的服務普及以及各類移動定位設備的增長,空間數據呈現出“爆炸式”增長,例如,OpenStreetMap全球點矢量數據集已有超過27億條記錄。為從日趨海量化的數據中獲取有用信息,聚集查詢[1]方法呈現出越來越重要的作用。當前很多空間在線應用需要的是一個聚集結果,而不是單個對象信息的集合。例如,查詢北京市區某個立交橋區域在某一時刻的車流量,以便于檢測交通擁堵,并不需要查詢范圍里的所有車輛具體的信息。
聚集查詢具有數據密集和計算密集的特征,是一種耗時操作。空間索引是提升聚集查詢速度的有效手段。R樹是一種典型的二維空間索引,采用最小邊界矩形對空間進行劃分[2-5]。Ra*樹在傳統R樹的基礎上增加聚集信息,是最早的多維聚集結構,其目的在于有效處理窗口聚集查詢[6]。之后,聚集R樹(aggregation R-tree,aR樹)在R樹節點的最小外接矩形內標注了其所包含的所有對象的聚集值,在聚集計算時可直接引用該信息,不用對每個對象進行聚集計算[7]。隨后,很多空間聚集索引技術不斷深入發展[8-10]。
在線聚集應用中的需求可分為兩類:一類要獲取精確查詢結果;另一類只需近似結果。對于后一種需求,以犧牲結果精度為代價來減少等待時間,但是要保證查詢精度能夠隨著時間推移不斷提升,且隨用戶需求而停止。就現有研究成果而言,對第一種需求還沒有針對聚集索引的并行構建方法。對后一種需求,基于數據采樣的近似聚集大多非針對空間數據;同時,返回近似結果時,也不能保證精確查詢結果的速度。
最近,大數據處理架構飛速發展,為在線聚集查詢性能的提升帶來機遇和挑戰。機遇源于其高效可擴展的特點;挑戰就空間聚集查詢而言,包括數據劃分和任務分解兩個普遍問題。在數據劃分時,如何保持數據的空間鄰近聚集特征,處理常見的數據傾斜和邊界對象分配問題[11]。在任務分解時,如何分解數據分區,避免分區不均導致負載不均衡以及分區過多導致的大量初始化開銷。
本文將精確查詢和近似查詢兩種需求結合起來,在提升精確查詢效率的同時,又能在精確結果返回前快速反饋近似查詢結果。針對精確查詢需求提出了基于Hilbert空間填充曲線劃分的聚集網格R樹(Hilbert partition based aggregation grid-R tree,HAGR樹)。然后在此基礎上提出了一種多層級采樣聚集樹(multi-layer sampling aggregation R-tree,MSAR樹)。
本文的主要貢獻如下:
(1)對Hilbert-aR樹進行并行優化,在此基礎上實現了HAGR樹,通過Hilbert數據劃分提高了索引搜索效率,建立全局網格索引提升了并行查詢效率。
(2)基于金字塔和大數據隨機采樣思想,在并行HAGR樹的基礎上提出了MSAR樹,通過概率查詢的逐步求精方式進一步提升了聚集計算效率,并且能夠實現良好的交互。
(3)在10億規模真實數據集上,驗證本文方法的有效性和正確性,能夠返回給定置信度下的置信區間,實現漸進式聚集計算。
2 相關工作
當前,近似聚集方法可以分為預計算和在線聚集兩類[12]。本文關注其中后一種方法。而在線聚集方法可進一步分為非索引的在線聚集方法[13-15]和基于索引的在線聚集方法[16-17]。
在非索引的在線聚集方法方面,在線聚集(online aggregation,OA)是一種在線近似聚集方法,不斷從底層隨機獲取元組并統計,然后在3個準則基礎上計算置信區間,直到結果滿足用戶的要求[13]。DBO數據庫原型系統能實現近似聚集查詢,很快返回一個推測結果,隨時間推移,各種關系操作從互相通信中獲取更多滿足條件的元組,因而推測結果的精度也隨之越來越高[14]。基于分塊的近似聚集算法(partition-based approximate aggregation,PAA)是一種基于劃分的近似聚集方法,對數據預先構建一個隨機樣本。在查詢時,首先在預構建的樣本中查詢,如不能滿足要求,再從與查詢區域相交的各個分片集合中獲取更多元組[15]。
在基于索引的在線聚集方面。MRA樹是一種多粒度聚集樹,該樹的每個葉子節點與一個區域范圍相關聯,存儲其孩子節點的聚集信息。在查詢時,判斷節點空間范圍與查詢范圍的空間位置關系,以此來決定是否查詢該節點的子節點。將該思想與四叉樹(MRA四叉樹)和R樹(MRA-R樹)結合,提供漸進的估計結果以及100%置信度的置信區間[16]。LS樹和RS樹這兩種索引方式是專門針對空間和時空在線分析提出的,在查詢過程中不斷獲取新的采樣樣本,采樣實現了一種面向在線空間或時空分析的逐步求精的查詢方式,能在任意置信度下反饋估計結果以及置信區間[17]。
以上方法往往在單機中進行,為提升聚集計算效率,一系列并行改進逐漸出現。基于MapReduce計算模型,能夠在查詢執行期間以順序流傳輸數據,進而不斷修正結果[18]。基于數據庫和大規模分布式節點方法,可以設計采樣創建和采樣選擇策略,以多層采樣方式實現對給定的誤差或是給定時間這兩種查詢模式[19]。這些方法都在大規模數據上取得了良好的效果,但是這些方法都不是專門針對空間數據而設計的。
在并行空間計算方面,基于MapReduce和Spark計算模型,已經有Hadoop-GIS[11]、SpatialHadoop[20],以及GeoSpark[21-22]、SpatialSpark[23]、LocationSpark[24]、Simba[25]等系統,提供了格網、四叉樹、R樹等空間索引支持來加速空間查詢等操作,其中大多系統支持R樹的并行構建[11,20-21,24-25],然而并不提供空間聚集索引的構建。
基于以上分析,現有的概率聚集方法很少應用于空間數據,且現有的空間分析系統并不支持聚集索引。因此,為了提升面向空間大規模數據的聚集分析,本文基于分布式內存計算架構Spark,針對在線聚集查詢應用,提出了兩種索引方式,HAGR樹和MSAR樹。其中,HAGR樹支持快速時空精確聚集分析計算,MSAR樹結合概率聚集查詢,進一步增強了在線時空聚集查詢的交互性。
3 問題描述
給定空間數據D,其中的元組可表示為K,V鍵值對的形式。其中K(K1,K2,…,Kd)表示元組的d維屬性信息,例如,空間矢量數據中d=2。V(V1,V2,…,Vv)表示元組的值屬性信息,對空間數據而言,V是包含各種空間屬性信息的集合,例如:(Oid,Geometry,…,Geometry Type)等。
聚集查詢可表示為F=fagg(op(V|Q?QR))。其中QR表示查詢區域;fagg表示聚集函數,包含SUM、AVG、COUNT、MIN以及MAX等常見聚集函數操作;op表示屬性操作,代表一般操作映射函數;Q是D的范圍,則Q?QR表示相交區域。
對于在線近似聚集,僅當聚集結果來自隨機采樣中獲得的元組,得到的結果才是有統計意義的估計結果。這一要求可以通過Heap Scans、Index Scans、Sampling from Indices方法保證,避免元組的屬性值影響其檢索的順序[13]。滿足上述條件基礎上,近似聚集查詢還需要其他衡量指標,包括置信區間CI,置信度p∈(0,1),以及誤差范圍ε。誤差范圍即置信區間寬度,是對估計精度的度量。得到這些指標后,即可通過公式CI=
4 并行聚集查詢索引
本文對aR樹并行優化,與Hilbert編碼的數據劃分方法結合。在HAGR樹構建過程中考慮數據劃分和任務分解兩個優化問題,處理了數據劃分過程中常見的數據傾斜和邊界對象問題,在查詢中提供了一種基于空間關系判斷的深度優先搜索(depth first search,DFS)方法。
4.1 HAGR樹構建
HAGR樹構建首要考慮是并行環境中高效構建,因而需要合理的數據劃分和任務分解作支撐。為展示數據構成,因而又將D表示為D={di|i∈[1,N]},d為單個元組,N為元組總數。
Hilbert編碼劃分方法。采用Hilbert編碼的劃分后,可以獲得幾乎近100%的空間利用率。因而,構建的Hilbert-R樹的查詢性能優于平方復雜度節點分裂的R樹、R*樹和Roussopoulos的批建立方法[26]。根據Faloutsos等[27]提出的Hilbert曲線編碼生成算法,目標點的Hilbert編碼值計算復雜度為,其中nh是空間層次劃分次數,即該點所在網格行列中數較大值所對應的二進制位數。

并行計算中,網格索引能實現高效關系判定,以實現有效剪枝。因而,本文在結合網格和聚集R樹索引后得到一種兩級索引——HAGR樹。其構建過程如圖1所示,主要分為數據劃分、數據排序、數據分解以及并行索引構建等4個步驟。

(2)在此基礎上,按照Hc對數據集排序,實現空間聚集特性。

(4)以D1D2…Dk為基礎并行構建Local Index,得到tree1tree2…treek。如圖1右下角,tree中A1區域的聚集結果直接由子節點a1+a2+a3獲得。之后,獲取各個數據塊的Mbb,更新Global Index,完成兩級索引構建。
4.2 數據傾斜和邊界對象處理
并行計算數據劃分過程,數據傾斜和邊界對象這兩個問題不可避免。數據傾斜源于實際數據的空間維度分布不均,會影響計算效率。例如,同一個Hc可能對應了多條元組,這些元組空間上無序,無法增加聚集特性,且在后續任務分解中容易造成分解不均。邊界對象源于網格劃分方式,若處理不好可能導致查詢結果錯誤。
數據傾斜處理。在HAGR樹構建的第(1)步中,添加處理算法。對輸入數據采樣,減少后續處理計算I/O;然后統計每個T包含的數據量TNH,定義閾值參數Cmax,如果存在TNH>Cmax,將Hilbert曲線編碼的劃分密度增加一倍;重復以上操作直至滿足要求。
邊界數據處理。對這類跨越邊界的數據,有指定網格和復制方法[11]。考慮到實際點矢量數據跨越網格的情況并不多見,本文采用了指定網格法。

Fig.1 HAGR-tree construction圖1 HAGR樹構建流程
4.3 查詢算法
索引構建完成后,采取一種基于空間關系判斷的迭代式深度優先查詢方式。空間關系判斷在兩層索引的查詢過程中都有涉及。
空間關系判斷。本文中,將空間關系主要分為4類:包含、相交、外包以及不相交。以Local index中給定QR的查詢LIQ(local index query),P為一個節點,Pi是一個指向根節點的指針,P.agg是節點對應的聚集值,P.Mbb是節點對應的外包框,P.child是子節點。則4種關系描述如下。
(1)包含,Mbb∈QR,可以直接從該節點獲取聚集值P.agg。
(2)相交,QR?Mbb≠ ? 且QR?Mbb≠QR,需要繼續查詢P的所有孩子節點。
(3)外包,QR?Mbb=QR,同樣需要繼續查詢孩子節點。
(4)不相交,QR?Mbb=? ,該節點及其孩子節點直接出隊,不再查找。
綜合得到查詢過程如算法1所示。首先利用Global Index實現剪枝,然后利用LIQ進行一種迭代式的DFS查詢,過程中判斷QR與該節點的Mbb的空間關系再繼續查找,直到獲得所有Local Index的結果,合并后輸出最終的Ra。
算法1HACR樹查詢算法
輸入:HAGR樹H-tree,聚集范圍查詢QR。
輸出:聚集查詢結果Ra。
1.search inGlobal Index,find everyMbb?QR≠ ? ;
2.for each qualifiedMbbdoLIQ(Pi,QR);
3.collect the answer,print the finalRa.
4.FunctionLIQ(Pi,QR){
5.for each branchP∈Pi
6.ifQRcontainsP.Mbb{Ra+=P.agg;}
7. else ifQRintersectsP.Mbb
8. caseP.childis branch
9. for eachP.childdoLIQ(P.child,QR);
10.caseP.childis leaf
11. for everyP.child
12. ifQRcontainsP.child{Ra+=1;}
13. end for
14.end if
15.end for}
5 面向在線交互的索引方法
基于HAGR樹索引,能夠并行反饋精確聚集查詢結果,但是在線應用中,有時用戶并不愿為精確的查詢結果等待長時間。如果隨著時間推移,查詢結果的精度越來越高,且用戶能在任意時間結束該查詢,這將能大大提升在線查詢的交互性。基于此,本文提出了MSAR樹,給出了近似分析的基本思想和理論支撐,介紹了構建流程以及查詢方法。
5.1 隨機采樣和聚集
MSAR基于數據采樣、金字塔構建以及逐層求精3種思想。此外,構建的隨機樣本滿足獨立同分布,這樣后續的分析才有統計上的實際意義。
數據采樣。采樣是應對大規模數據的一種有效手段,降低了后續處理的I/O。PAA[15]中維護固定大小為M∈[10,100]的RS(M單位為MB),在處理356 GB的數據時,M=25 MB,S=0.0686%,且RS緩存到內存中,因而實現了很高的查詢效率。本文設定采樣率S(S∈(0,1)),并不固定樣本的大小,而是采用一種無放回的采樣方式構建動態隨機樣本集DS(data of random sample)。

逐層查詢求精。數據量小的數據查詢速度較快,因而從最高層級Layerl開始查詢,根據用戶的反饋決定是否終止查詢。
以上思想需要隨機采樣理論作為支撐,而這方面已有很多相關研究[13,28-30]。Haas對范圍查詢的采樣方式使用了新的約束,樣本在查詢內部和查詢之間必須是獨立的,這樣的方法很好地實現了理論上的完備性。但是在實際應用中,尤其是面向超大規模的空間數據,耗費比較多的時間[30]。在OA[13]研究中,使用中心極限定理來計算近似聚集查詢結果,這要求使用的數據必須是隨機獲得的。本文中,先獲取DS,采樣得到的數據即為隨機元組集合。然后,對DS基于索引聚集查詢。根據Index Scans,這是具有實際統計意義的結果。
近似分析時需要數據滿足獨立同分布,后續分析才有統計意義。本文認為這樣得到的元組信息是滿足獨立同分布。基于以下三點認識:
(1)對不同用戶而言,一般他們只會執行相同的QR一次。即便進行多次,只要等待(結束查詢)的時間不一樣,得到的Ra不同。
(2)索引更新代價并不高,對于實際中產生的數據采用實時采樣更新的方式添加,這樣更新前后的數據是有差異的。
(3)為了應對上億規模或是更大的空間數據集D,相應的預處理過程是很有必要的。
5.2 MSAR樹構建
在時空數據采樣的基礎上,得到了金字塔多級數據,然后以此為基礎進行索引構建。LS樹采用類似的思想實現了多層級索引,在單機環境中實現[16]。為了在分布式環境中應用,充分優化提升索引效率,本文提出的MSAR樹還有以下特點。
自適應數據分塊。數據金字塔中,各個層級Ni(i∈[1,l])差異較大,因而須根據Ni進行不同粒度的數據分解。當層級低,Ni大的時候,分塊盡可能多,ki≥3c;當層級高,Ni小的時候,分塊相應減少,因為過多分塊會導致很多初始化開銷。

并發并行查詢。為了獲取近似結果的同時快速獲取精確結果,本文還可采取并發方式,對多層級索引同時查詢,為在線聚集查詢提供更佳體驗。
MSAR樹的構建過程如圖2所示,可分為隨機樣本獲取、劃分及分塊、索引構建3個主要步驟。

Fig.2 MSAR-tree construction圖2 MSAR樹構建流程
(1)隨機樣本獲取。設定S,構建數據金字塔DS0DS1…DSl。
(2)劃分及分塊。在各個DS基礎上得到輸入數據Data,進行數據劃分、數據排序;然后處理數據傾斜和邊界對象;最后自適應數據分塊。
(3)索引構建。在各個層級上建立Local Index和Global Index,并依據硬件條件動態緩存,得到MSAR樹。
5.3 查詢算法
在查詢時,基本方法如算法2描述所示,LIQ與算法1同,輸入為整個Local Index。具體查詢過程中,既可以按照高層級到低層級的方式進行,還可以進行并發查詢。算法中描述的是順序查詢方法。
算法2MSAR樹查詢算法
輸入:MSAR樹M-tree,聚集范圍查詢QR。
輸出:聚集查詢結果Ra。
1.whileLayer>0,do{
2.search inGlobal Index,find everyMbb?Q≠? ;
3.for every qualifiedMbbdo
4.LIQ(Local Index,QR);
5.returnRaandCI
6.ifRais qualified
7.exit query
8.else
9.Layer=Layer-1
10.end if}
6 時空在線分析與估計
6.1 估計總體查詢結果
對MSAR樹,除底層數據外,其他層級的數據都是隨機采樣所得到的。范圍查詢QR數據分互斥的元組集合:滿足QR的集合,不滿足QR的集合。
結合OA方法,本文基于索引聚集查詢,得到的是具有實際統計意義的結果,因為用于構建索引V不同于用來聚集計算的V,避免了數據屬性值影響其檢索的順序。

6.2 置信區間計算
MSAR樹反饋的近似結果需要一個評價指標,使得用戶能夠根據結果做出是否采納當前結果的判斷。而且,在保證置信度水平不變的情況下,需要盡可能縮短CI的寬度,提高結果質量。由于本文針對大規模空間數據進行分析,可以由CCI(conservative CI)和LCI(large-sample CI)分析,但是選擇了后者作為衡量標準,因為LCI較CCI往往能提供更短的CI。
在對整體估計基礎上,根據Hoeffding不等式即可以計算出CCI,結果區間為[Yn-εn,Yn+εn],能夠保證最終結果大于或等于p。
7 實驗
7.1 實驗設置
本節評價兩種索引方法的性能。程序利用Scala語言實現,Spark版本為1.6.1,Hadoop版本為2.6.3,Scala版本為2.10.4。具體機器配置如表1所示。

Table 1 Experiment environment表1 實驗環境
本文使用OpenStreetMap線矢量數據中的節點作為點數據,如表2所示。其中,OSM_China(OP)表示中國區域的數據,OSM_Planet(OP)表示全球數據。實驗中,選取GeoSpark[21]中的R樹索引(GR)和Simba[25]中的R樹索引(SR)與本文算法進行比較。實驗從索引構建時間、查詢效率、誤差和置信區間四方面評價不同算法。

Table 2 Experimental datasets表2 實驗使用的數據集
7.2 索引構建時間比較
本實驗首先評價HAGR樹和MSAR樹在單機、集群環境下的構建效率。
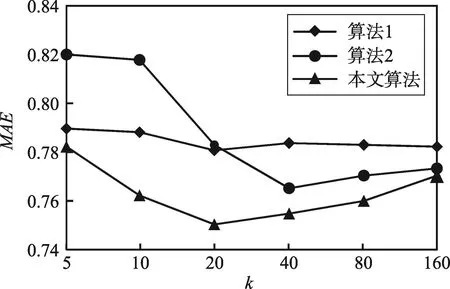
Fig.3 Performance comparison on index construction圖3 索引構建性能比較
單機構建時間比較。如圖3(a)所示,GR樹的構建速度最快,因為其針對空間數據結構在每個分區內構建局部索引,以一種自適應方式根據數據塊大小決定是否構建索引。HAGR樹構建速度較SR樹稍快,差別并不大,但兩者較GR樹的構建時間慢一個數量級,且這一趨勢隨著數據量增加愈發明顯。由于數據采樣、多層級索引構建及緩存等,MSAR樹構建最耗時,大致為HAGR樹的兩倍。
集群構建時間比較。結果如圖3(b)所示,應對16.9億條數據時,GR樹構建時間為80.3 s;MSAR樹構建時間是465.5 s,都能較快完成。(a)(b)中的數據不同,OP是整個地球的數據集,其范圍較OC廣得多,構建更復雜。即便如此,兩者同樣規模的數據對比依舊具有一定分析意義。在N為5000萬時,HAGR、MSAR和SR比單機快,因為合理的數據劃分和并行構建。而GR提升效果不明顯,尤其是當數據量小的時候,這正是由于其特定數據劃分以及自適應構建方式導致的。總體而言,本文方法在集群具有較好可擴展性。
7.3 查詢時間比較
本實驗比較在查詢過程數據大小N變化、固定查詢框的比例QR/Q,以及查詢框的比例QR/Q變化、固定數據集N這兩種情況下,查詢時間的變化。MSAR樹反饋的是最高層級(l=10,S=50%)的查詢結果。將l10層級采樣數據量視作PAA[15]中的RS,并行進行順序元組查詢方法即可視作并行PAA方法中階段一的查詢,這一階段查詢僅僅利用預構建樣本查詢,以P-PAA(parallel PAA)表示。P-PAA僅僅應用在QR/Q變化,固定N的實驗中,因為該方式下固定數據集大小,更接近原文中階段1的查詢方法。
(1)N變化,固定QR/Q

Fig.4 Performance comparison on index query圖4 索引查詢性能比較
單機實驗。結果如圖4(a)所示,由于3種優化措施,MSAR樹查詢性能最優。在N為5000萬時,MSAR相較于HAGR、SR以及GR分別實現了2.8、17.5、199.9倍的性能提升。HAGR樹的查詢性能相較于SR樹大致提升一個數量級,且隨N增加而更加明顯。這是因為全局網格索引實現有效剪枝,當N增加時元組密度增加,單個D的Mbb會減小,因而相同的范圍中包含了更多的完整數據塊,這些數據塊的聚集結果可以直接在全局索引中獲取。然而,構建速度最快的GR樹查詢效果卻最慢,這是由于GR樹僅僅構建了局部索引,其中自適應的方式沒對較小的數據塊構建索引。
集群實驗。如圖4(b),集群環境中進行同樣的實驗得到了基本類似的結果,4種方法都能夠應對16.9億規模數據。MSAR樹實現了更高的穩定性。但是應對同等N的數據集時,MSAR、HAGR和SR都并未表現出提升,這是由于數據的空間范圍大大增加,提升了查詢復雜度。GR的提升是由于該數據集上更合理的劃分方法。
(2)QR/Q變化,固定N
對于特定數據集,當查詢框的面積變化時查詢性能的變化。在該實驗中,添加了兩種比較方法,RR(range report)和P-PAA。RR是并行遍歷方法,對非采樣數據進行查找。
單機并行環境。如圖4(c)所示,即便并行進行,RR的查詢效率依舊較低。這種遍歷式的方法對資源消耗較大,不適用于在線交互。P-PAA并行遍歷RS后,僅僅耗時635.8 ms就能得到計算結果,耗時較GR短。MSAR樹、HAGR樹以及GR樹的查詢效率在QR增加時均呈現下降趨勢,這是由于前兩種方法在QR增加時可能覆蓋很多完整D的Mbb,因而不需要搜索Local Index便能得到聚集結果。類似的是,GR樹雖然沒有全局索引,但每個D包含整個數據塊的聚集信息,因而也會出現先上升后下降的趨勢。SR樹呈現上升趨勢,因為單個局部索引中不包含任何D的聚集信息,需要進一步查詢得到聚集結果。
集群并行環境。如圖4(d),實驗結果基本類似,HAGR樹和MSAR樹的查詢性能保持穩定。P-PAA的優勢更加明顯,平均僅需1112.8 ms就能得到計算結果。但是,GR樹的查詢時間隨QR先下降后上升,因為當數據量增加后,I/O和整體計算量依舊增加。
7.4 估計精確查詢結果
本實驗利用MSAR樹在OC上驗證,在單機并行環境中進行,采取由高層級到低層級的順序逐層反饋方式。
實際查詢結果如表3所示,其中Time為累計時間,Count為該層級的聚集結果,Error為相較于完整數據查詢結果得到的誤差。查詢時,按照從Layer10到Layer1的順序。當由Layer4查詢到Layer3時,Time迅速增加,這正是由動態緩存方式所導致的,Layer10到Layer4的數據都緩存在內存中,而剩余部分的數據都是緩存在磁盤中,因而查詢需要耗費更多時間。當查詢到Layer3時,查詢誤差已經下降到0.31%,達到了較高的精度。且從總體看來,誤差呈現下降趨勢。

Table 3 Result estimation and error analysis表3 結果估計及誤差分析
7.5 置信區間分析
本實驗估計近似查詢的效果。在面向在線分析的應用中,對用戶提交的查詢QR,及其設置的置信度p,為反饋的結果添加CI。
如圖5所示,利用與7.4節相同的實驗環境,設定p=95%,得到CI結果,由于估計結果兩邊的ε相同,因而未列出估計結果值。由圖可知,區間寬度逐漸收窄,即在同樣的置信度下精度不斷提升,估計效果越來越好。
8 結束語

Fig.5 Confidence intervals calculation圖5 計算置信區間
本文針對空間在線分析,從并行索引構建與查詢出發提出了HAGR樹和MSAR樹這兩種索引方式。前者能快速反饋精確聚集查詢結果,后者適用于漸進式近似聚集查詢,為解決空間大數據分析提供了兩種互為輔助的可行方案。通過10億級數據的實驗驗證了本文方法是可行、高效、可擴展的。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56