基于總線技術的螺釘擰緊機器人工作站設計
2018-10-11 09:15:42徐六喜蔣立正
制造業自動化 2018年9期
王 蟬,徐六喜,周 建,蔣立正
(1.中聚(杭州)新能源有限公司,杭州 311100;2.浙江機電職業技術學院 機械技術系,杭州 310053;3.浙江工業大學 機械學院,杭州 310014)
0 引言
智能制造已經成為全球制造業發展的新趨勢,為了應對日益增高的工業制造成本和激烈的行業競爭形勢,越來越多的傳統制造型業開始改變以往的生產制造經營模式,通過引進高端智能制造裝備實現生產的自動化,進一步提升工業生產效率,促進產業結構向智能化方向調整,而工業機器人憑借其高效穩定、精細制造加工以及柔性生產等技術特點成為智能制造裝備技術的關鍵[1,2]。
我國新能源汽車行業正在迅猛發展,新能源汽車的核心技術主要是電池包,其生產裝配質量直接影響新能源汽車的性能[3]。本研究將現場總線技術應用于工業機器人動力電池包螺釘擰緊工作站中,采用基于Profibus總線技術的西門子S7-1513系列PLC控制系統,通過現場總線技術將ABB工業機器人和遠程I/O從站ET200sp連接在一起,形成一個高速、可靠和經濟型的通訊網絡。
1 螺栓擰緊機器人工作站的總體設計
1.1 動力電池包的銅排組裝工序簡介
在新能源行業動力電池包(結構如圖1所示)的銅排組裝工序中,傳統螺釘擰緊主要依靠人工手動操作電動扭矩扳手的方式進行作業。作業人員首先把螺釘放入螺紋孔然后用電動扳手擰緊,當電動扳手扭矩達到設定值后自動停止。由于每個電池包所需要組裝的螺釘數量較多,該工序的作業人員很容易少裝螺釘,產品流入到下一工序不僅增加了下一工序的工作量,而且嚴重影響了生產效率和產品質量。

圖1 動力電池包的結構示意圖
本文研制的螺釘擰緊機器人工作站是將扭矩電動扳手安裝到機器人的第六軸上,當電池包被流水線輸送到螺釘擰緊工位上,機器人在該等待位置等待,通過震動盤自動上料系統將螺釘用壓縮空氣吹送到電動扳手的批頭處,此時機器人開始動作,運行到電池包螺釘擰緊工位處,氣缸推動電動扳手將螺釘送入到螺紋孔中,啟動電動扳手開始擰緊螺釘。每擰緊一顆螺釘,系統都會自動進行計數,直到當前電池包的所有螺釘擰緊完成,電池包被放行,進入下一工序。電池包螺釘擰緊工藝流程如圖2所示。
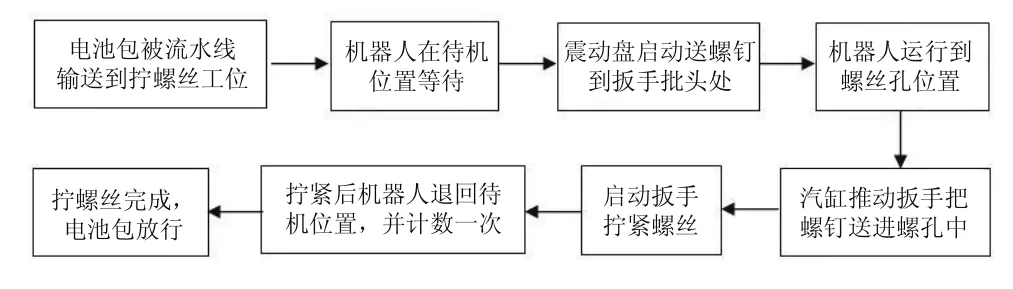
圖2 動力電池包的螺釘擰緊工藝流程
1.2 螺釘擰緊機器人工作站的總體布局
動力電池包螺釘擰緊機器人工作站的執行機構主要由ABB工業機器人、螺釘上料震動盤、電動扭矩扳手、輸送鏈、控制柜及機械防護欄等幾個部分組成,其總體布局如圖3所示。

圖3 機器人螺釘擰緊工作站布局
2 螺釘擰緊機器人工作站控制系統設計
2.1 螺釘擰緊機器人工作站控制系統的架構和主要通信方式
柔性制造生產線以西門子PLC S7-1513作為主站結合一臺ABB機器人、阿特拉斯電動扳手、ET200SPI/O模塊作為從站的智能制造組裝單元。機器人位于傳輸線體一側,通過接收PLC控制器的信號,實現自動移動扳手到擰螺絲孔位置。機器人不直接與電動扳手和螺釘上料震動盤信號交互,通過接受PLC的控制指令,并反饋運行的狀態,實現與電動扳手、螺釘上料震動盤間的協同動作,如圖4所示。
2.2 Profibus網絡組態技術
PROFIBUS是一種國際化、開放式、不依賴于設備生產商的現場總線標準[4]。適用于制造業自動化、流程工業自動化和樓宇、交通、電力等其他領域自動化[5]。PROFIBUS-DP具有高速低成本通信優點,廣泛用于設備級控制系統與分散式I/O的通信[6]。

圖4 螺釘擰緊機器人工作站控制系統的架構和主要通信方式
本文應用采用西門子全新系列PLC S71513-1pn和Profibus模塊CM 1542-5做主站,I/O模塊ET200SP和ABB工業機器人IRB_2600做從站。在西門子編程軟件TIA Portal v13中安裝ABB機器人GSD文件HMS_1811.GSD,在Profibus網絡中添加Anybus-CC PROFIBUS DP-V1并進行站地址分配,如圖6所示。

圖5 Profibus網絡組態
在設備Anybus-CC PROFIBUS DP-V1中添加I/O通訊字節數量,指定通訊字節所對應PLC中的I/O地址,如表1所示。

表1 PLC與機器人組態點表
2.3 PLC與機器人信號交互
I/O信號用于機器人運行中與PLC信號交互,PLC通過Profibus數據交換控制機器人的啟動停止、錯誤復位、參數設置等,同時接收到機器人運行狀態、動作完成、錯誤信息等反饋數據。PLC與機器人邏輯信號參照表[7],如表2所示。
2.4 ABB機器人Profibus適配器DSQC667的連接
ABB機器人提供了DSQC667模塊基于Profibus總線技術與PLC進行快捷和大數據量的通訊。DSQC667模塊安裝在IRC5主機上,最多支持512個數字輸入和輸出,完全能夠滿足用戶的通訊數據量。通過ABB工業機器人的FlexPendant設定DSQC667模塊參數,如表3所示。

表2 I/O信號的邏輯關系
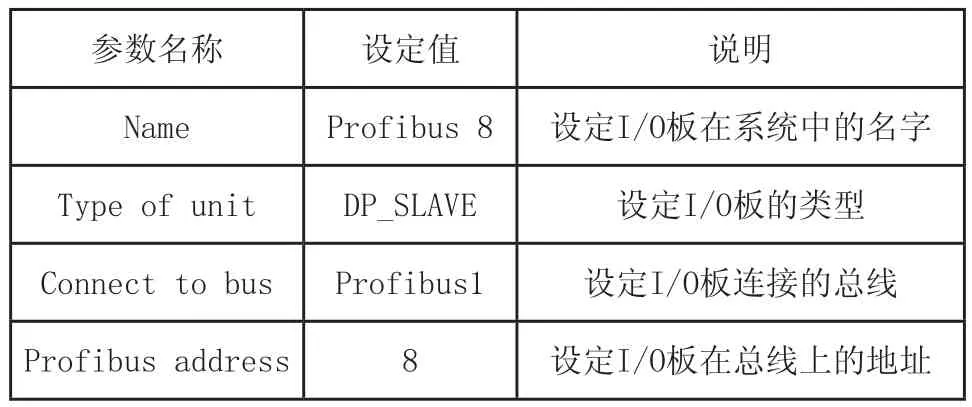
表3 DSQC667參數設定值
3 ABB機器人程序設計
通過工業機器人的示教操作,調整工業機器人及扭矩扳手與輸送鏈、螺釘上料震動盤之間的空間位置,使它們與工業機器人相對位置正確。圖6給出了ABB機器人程序控制流程圖,ABB機器人啟動后首先執行初始化程序,復位PLC交互的邏輯信號,然后回到原點位置等待。當接收到動力電池包即工件到位,扳手和震動盤就緒信號后,執行螺釘擰緊程序,當螺釘擰緊失敗后,ABB機器人運行到退釘位置執行自動退釘程序,然后,重新執行螺釘擰緊程序,螺釘擰緊完成,運行程序結束,機器人回原點等待。
ABB工業機器人提供了軟件RobotStudio和FlexPendant兩種方式,可以完成機器人程序的編寫。一般而言,利用RobotStudio軟件編寫ABB機器人程序顯得更為方便和高效。
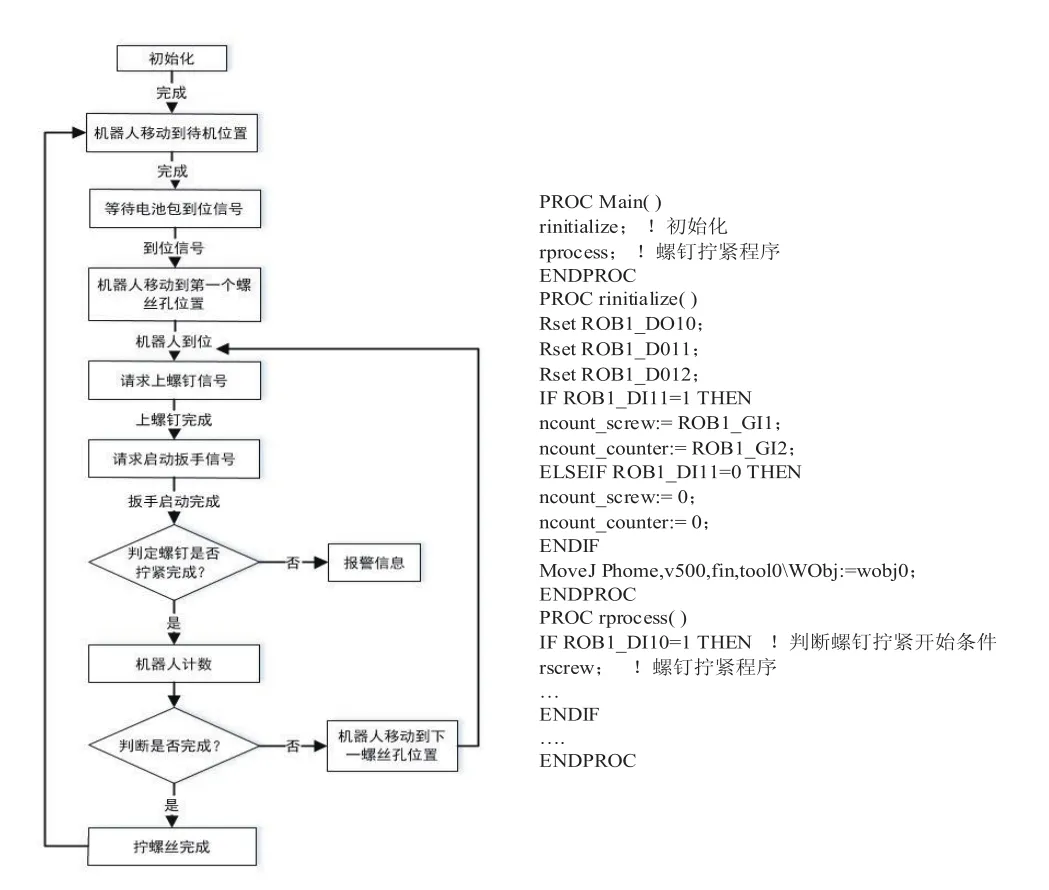
圖6 ABB機器人程序控制流程圖及機器人程序(部分)
4 實際應用
目前設計的螺釘擰緊工作站已經投入使用,與傳統手動螺釘擰緊方式相比,操作簡單,大幅度提高了生產效率和產品質量,降低了勞動強度取得了良好的經濟效益。
5 結論
1)應用基于總線技術把機器人連接到PLC控制系統中,提高了螺釘擰緊工作站的智能化程度。
2)實踐應用表明,工作站系統穩定,螺釘擰緊工作質量優良,具有良好的推廣意義。
