
基于stc89c52的尋跡避障智能車研究
2018-09-28 00:12:34張立臣肖松平張琦
智富時代 2018年8期
張立臣 肖松平 張琦
【摘 要】隨著人們生活水平的不斷提高,越來越多智能化的產品走進了我們的生活,例如無人駕駛的汽車、快遞機器人等。這些產品極大的便利了我們的生活。本文設計了一種尋跡避障智能車,以STC89C52RC單片機為控制芯片控制電動小汽車的速度及轉向;通過安裝紅外對管檢測黑線,從而實現小車自動循跡功能;利用超聲波模塊檢測行進方向上的障礙,實現避障功能。小車電機驅動由L9110驅動電路完成,速度由單片機輸出的PWM波控制。最終完成小車自動尋跡避障調速,與此同時附加紅外遙控控制,使其操作更加靈活方便。為智能化的進一步研究打下基礎。
【關鍵詞】STC89C52;L9110;紅外遙控
隨著自動化、智能化的飛速發展,產品設計的要求也越來越高,從自動分揀的流水線到無人駕駛的汽車,人工智能機器人等這些都離不開電力電子技術,而其中無人駕駛汽車、自動運輸的快遞車能夠代替人來完成一些特殊任務,一方面減少了人員傷害,另一方面節約了人力資源,這些都為我們的生活提供了極大的便利,而我們這次所做的設計就是關于尋跡避障智能車,希望通過這次智能車的設計為以后的工作和更深入的學習打下基礎。
一、系統方案基礎
(一)器件選取
1.驅動模塊
在驅動模塊上我們考慮了L298N和驅動模塊L9110s,經過分析L9110s將分立電路集成在單片IC之中,這也就使得外圍器件成本極大的降低,相對的可靠性提高。加上該器件結構簡單操作方便非常適合智能車的設計。同時該芯片具有良好的抗干擾性。
2.紅外尋跡模塊
紅外尋跡模塊主要選取了TCRT5000模塊[2],主要是因為在本設計中,當尋找黑線時,如果掃描到黑線則被吸收,輸出高電平,反之則輸出低電平,進而控制電機轉動方向,實現前進和轉向功能。
3.超聲波避障模塊
我們選取了HC-SR04器件[3],一方面其成本低廉,其次管腳較少,結構簡單便于操作。超聲波測距模塊[3]當發射端發一個10US以上的高電平,就可以在接收端監測是否有高電平輸出.一但有輸出就可以打開開定時器計時,當接收端變為低電平時則根據定時器的值,即為此次測距的時間,算出距離.如此不斷的周期測,就可以達到不斷檢測的值。
(二)智能車設計概述
智能小車采用前輪驅動,前輪左右兩邊各用一個電機驅動,通過控制左右兩個輪子分別正轉和反轉,從而達到控制轉向的目的,后輪是萬象輪,起支撐的作用。將循跡光電對管分別裝在車體下的左右。當車身下左邊的傳感器檢測到黑線時,芯片控制左輪電機反轉,右輪正轉實現左轉,當車身下右邊傳感器檢測到黑線時,主控芯片控制右輪電機反轉,車向右轉。避障的原理在車身前方裝有超聲波傳感器,當其檢測到障礙物時,主控芯片給出信號報警并控制車子停止、右轉,再次感應重復上述操作,從而避開障礙物。
二、智能車總體設計
(一)總體設計方案
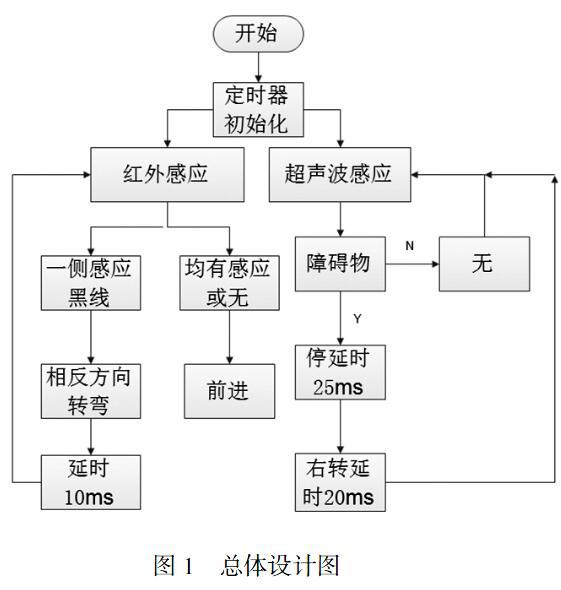
智能車整體分為三部分,首先是驅動實現小車的運動,其次是通過紅外對管進行循跡,通過對電機轉速的控制實現轉彎,最后是超聲波避障功能躲避障礙物,下面是我們的整體設計圖。
(二)主要設計介紹
1.尋跡模塊設計
初始化進行紅外檢測,一旦出現偏離情況,則調用電機驅動程序,做出相應轉向,延遲10ms之后馬上進行下一次判定是否偏離,如果還偏離則仍舊做出相應轉向,延遲10ms后繼續判斷,直到正常為止,調用直行程序前進。在尋跡時有兩種方法,一種是兩個都是放置在黑線內側緊貼黑線邊緣,第二種是都放置在黑線的外側,同樣緊貼黑線邊緣。所以在這里我們在書寫程序的時候如果都在外側或者都在內側都會驅動前進,否則就是轉向判斷。
2.避障模塊設計
避障過程中,通過超聲波探測距離,不斷修改程序以及小車自身的速度進行調節確定最合適的避障距離,之后在延時繼續重復操作完成避障。當距離小于10cm時,啟動避障程序,小車先停止延時[4]20ms,之后右轉延時10ms,再次檢測距離是否還存在障礙物,重復上述操作,完成避障,前進。
3.驅動模塊設計
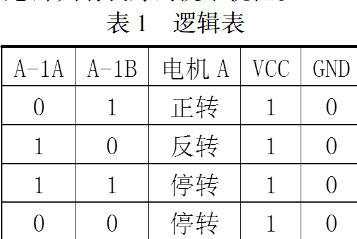
驅動模塊我們采用L9110S模塊同時驅動兩個電機,當電機一個輸入為高一個輸入為低時則對輪子進行驅動正轉,相反時則進行反轉,控制兩個輪子同時正反轉完成前進后退操作。當需要轉彎時,根據延時設計,一個輪子正轉另一個輪子延時停止、正轉、停止不斷重復平穩轉彎。
(三)設計成果
完成了由STC89C52RC芯片控制驅動模塊、紅外尋跡模塊、避障模塊幾部分,實現小車的尋跡避障功能,并且能夠手動調節速度,且擁有紅外遙控控制功能,做成了所謂的遙控車。
調試時,正常情況下前進,當車身下左邊的傳感器檢測到黑線時,單片機控制實現小車的快速左轉。當車身下右邊傳感器檢測到黑線時,與左轉情況相反。在車身正前方裝一個超聲波探測器,當其檢測到障礙物時,單片機給出信號并控制車子停止,當障礙物移除后,小車[5]繼續按黑線循跡前進。調試從5次成功1次到最后全部成功。
三、結論
小車制作成品,能夠很好的完成黑線尋跡避障且避障之后緩慢調整重新尋找黑線軌跡,繼續完成按軌跡行走,進而完成一系列的任務。智能車的尋跡避障的實現是智能化的基礎也是未來實現更高自動換產品設計的基石,我們可以根據智能車的設計附加其他功能來便利人們的生活水平進而更好地為社會服務。
【參考文獻】
[1] 郭天祥.新概念51單片機C語言教程[M].北京:電子工業出版社,2009.
[2]王超藝,王宜懷.基于紅外傳感器的自尋跡小車控制系統的設計[J].電子工程師,2008,34(11):60-62.
[3]張萍.超聲波避障智能小車的設計[J].自動化儀表,2017,38(09):40-43.
