耙吸挖泥船全自動與手動疏浚系統切換控制方法
2018-09-28 08:02:48賀海濤龐景墩
中國港灣建設 2018年9期
關鍵詞:系統
賀海濤,龐景墩
(中交疏浚技術裝備國家工程研究中心有限公司,上海 201208)
0 引言
耙吸挖泥船是一種裝備耙頭挖掘機具和吸泥裝置的大型自航、裝艙式挖泥船,適用于水域開闊的海灣、河口及海港、河流的航道疏浚作業,為世界各國在較大的疏浚工程中廣泛采用[1]。挖泥船的疏浚作業包括挖泥、拋泥與艏吹等主要過程[2]。與絞吸挖泥船不同,耙吸挖泥船在作業過程中始終在低速航行,操作人員既要顧及船舶的駕駛與避讓,又要關注施工設備的工作狀態以便采取相應的操作,所以存在人力資源耗費較大、容易出現操作人員疲勞、施工效率沒有達到最優甚至引發生產事故等問題。因此在耙吸挖泥船上安裝全自動疏浚控制系統對于疏浚作業的提高效率、控制事故、降低人力成本具有重大意義[3]。
1 全自動疏浚控制系統的架構
傳統耙吸挖泥船通常安裝一套可編程邏輯控制器 PLC(Programmable Logic Controller),用于采集各類傳感器數據、發布指令驅動其他設備完成特定功能、與其他系統進行通訊、完成人機交互[4-5]。這種配置實現了疏浚過程的手動控制和一些簡單的自動控制功能,為了與下文區別,此處稱為手動PLC。
全自動疏浚系統[6-7]是在手動疏浚系統的基礎上另設置一套全自動PLC,用于實現耙吸挖泥船全自動疏浚功能,其他設備包括1個全自動疏浚控制臺,1臺計算機和1個HMI(Human Machine Interface人機接口)觸摸屏。
計算機、PLC通過以太網與船舶控制系統環網連通。計算機配置觸摸功能顯示器用于顯示專為全自動疏浚系統定制的SCADA(Supervisory Control And Acquistion檢測控制和數據采集)界面,并同時安裝定制的DTPS(Dredge Tracking And Profile System疏浚軌跡與剖面系統)程序,用于部分全自動功能參數設置。HMI主要用于操作人員的控制命令輸入、自動控制器參數設置宏按鈕運行狀態指示。手動PLC和全自動PLC共同構成了疏浚控制系統。
疏浚控制系統結構圖如圖1所示。
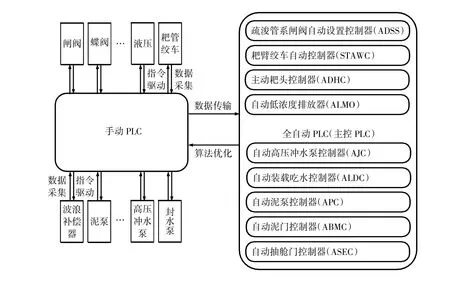
圖1 疏浚控制系統結構圖Fig.1 Structurediagram of dredging control system
由圖1可見,手動PLC系統和全自動PLC之間既有聯系又相對獨立。在全自動疏浚工況下,手動PLC從各系統采集數據,然后通訊傳輸給全自動PLC。根據不同的工況,全自動疏浚系統不斷調用其中的自動控制器,對數據進行計算與優化[8],再將計算結果返回給手動PLC,由手動PLC發出指令,驅動各設備完成動作。當全自動PLC出現故障或施工中出現無法由程序自己處理的情況,可以將全自動疏浚系統切除,回復常規的手動操作。
搭載全自動控制和手動控制系統的耙吸挖泥船涉及到全自動和手動兩套控制系統的控制權限切換。耙吸挖泥船施工過程中有許多大功率重型設備在高速運轉,有時需要在此類設備運轉的情況下進行手動/自動切換,因為手動與全自動是兩套相對獨立的控制系統,切換過程中如何處理正在運行的疏浚設備尤為重要。簡單地將設備停止或啟動不但降低了施工效率,甚至會直接損壞設備或造成安全事故。
為此,提出耙吸挖泥船全自動與手動疏浚系統切換控制方法,實現全自動與手動疏浚系統無縫切換控制,可以保障船舶全部工況下的施工安全,提升施工效率及全自動疏浚系統的適應性和可靠性。
2 全自動疏浚過程的切入
切入是指耙吸挖泥船的疏浚系統由手動控制狀態轉為自動控制狀態。當操作人員將檔位放置于該狀態時,表明全自動控制有效,此時可通過操作HMI上的相應宏按鈕進行全自動功能選擇。切入后全自動PLC取代手動PLC進行邏輯判斷,手動PLC僅作I/O驅動用途。全自動疏浚過程切入流程圖見圖2。

圖2 全自動疏浚過程切入流程圖Fig.2 Cut-in flowchart of full-automatic dredging progress
切入步驟為:操作人員將手動/自動轉換開關轉到自動檔位,檢測疏浚控制系統的手動PLC是否正在執行控制程序。如果“是”則控制自動疏浚系統的全自動PLC輸出故障狀態至工作臺上的紅色信號燈,表示切入不成功,等待手動PLC本次掃描周期結束;如果“否”則手動PLC輸出“允許切入”命令至全自動PLC,在全自動PLC接到該命令后,則會輸出自動狀態至工作臺上的綠色信號燈,同時輸出信號鎖定手動PLC,表示切入成功,疏浚過程實現自動控制。
3 全自動疏浚過程的切出
切出是指耙吸挖泥船的疏浚系統由自動控制狀態轉為手動控制狀態。手動狀態下,全自動控制無效,全自動疏浚系統所有宏按鈕操作無效。如果操作人員在該狀態下進行宏按鈕操作,不論操作條件是否具備,全自動疏浚系統控制器件都不會進行任何形式的響應。此狀態下僅手動PLC投入使用。切出流程圖如圖3所示。
切出步驟為:操作人員將手動/自動轉換開關轉到手動檔位,檢測控制全自動疏浚系統全自動PLC是否正在執行控制程序。如果“否”,則全自動PLC輸出信號,使得自動控制功能運行指示燈熄滅,自動控制功能無效,轉換為手動控制,切出成功;如果“是”,則檢測自動控制功能是否在關鍵進程,如果不在執行關鍵進程(關鍵進程的描述見本文第4章),則停止當前自動功能,切入到手動控制狀態。如果正在執行關鍵進程,進入過渡狀態,在過渡狀態下設備保持當前狀態并且故障指示燈亮,提示操作人員介入操作。

圖3 全自動疏浚過程切出流程圖Fig.3 Cut-out flowchart of full-automatic dredging progress
4 關鍵進程下的切出
確定系統是否處于關鍵進程主要基于兩點:首先,在一些較復雜工況下挖泥設備本身是否存在被損壞的風險。如耙管正在水下工作,因水下環境惡劣,在這種情況下切出時如果沒有過渡處理,耙管損壞的可能性較大。其次,在設備正常運行時,突然急停會給生產造成巨大的損失,如泥泵在正常工作時突然急停,會導致堵管,需要停產并人工清理管路。因此系統處于關鍵進程下切出需要一個過渡狀態,發出報警提示持續5 min,提醒人工干預,過渡狀態結束后系統控制權再進入手動狀態。若5 min后仍無人工介入,切出失敗,系統回歸自動控制狀態。
在挖泥、拋泥與艏吹3個工況中都存在關鍵進程。
在挖泥過程中,下列狀態時系統處于關鍵進程,這時切出全自動控制,系統會進入過渡狀態,在其它狀態下則可以直接切出。
1)在泥泵運行時切出。系統控制泥泵在當前轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的泥泵轉速與自動狀態下的轉速相匹配,防止在切換后旋鈕控制的轉速為0,泥泵停止運行。
2)在舷外波浪補償器動作時切出。系統首先要鎖定波浪補償器,使其暫停動作,然后將耙頭絞車提升1 m,之后再跟隨手動控制手柄的絞車速度,同時解鎖波浪補償器。
3)在著地過程耙管水平夾角超限時切出。系統首先鎖定波浪補償器,使其暫停動作,然后將耙頭絞車提升1 m,之后再跟隨手動控制手柄的絞車速度,同時解鎖波浪補償器。
4)在高壓沖水運行時切出。系統控制高壓沖水泵在當前的轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的高壓沖水泵轉速與自動狀態下的相匹配,防止在切換后旋鈕控制的轉速為0,高壓沖水泵停止運行。
在拋泥過程中,下列狀態時系統處于關鍵進程,這時切出全自動控制,系統會進入過渡狀態。其中:
1)在高壓沖水運行時切出。系統控制高壓沖水泵在當前的轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的高壓沖水泵轉速與自動狀態下的相匹配,防止在切換后旋鈕控制的轉速為0,高壓沖水泵停止運行。
2)在沖艙泥泵運行時切出。系統控制泥泵在當前的轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的泥泵轉速與自動狀態下的相匹配,防止在切換后旋鈕控制的轉速為0,泥泵停止運行。
在艏吹過程中,下列狀態時系統處于關鍵進程,這時切出全自動控制,系統會進入過渡狀態:
1)在泥泵運行時切出。系統首先關閉抽艙門,打開抽艙引水閘閥。如果泥漿的流速比臨界流速快0.5 m/s,則泥泵的轉速不用調整;如果低于臨界流速0.5 m/s,則先控制泥泵增速使泥漿流速超過臨界流速0.5 m/s,防止切換的瞬間,泥泵轉速不夠使泥漿流速降低導致堵管。然后,控制泥泵在此轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的泥泵轉速與自動狀態下的相匹配,防止在切換后旋鈕控制的轉速為0,泥泵停止運行。
2)在高壓沖水運行時切出。系統控制高壓沖水泵在當前的轉速下運行5 min,期間操作人員應調整旋鈕,將手動控制的高壓沖水泵轉速與自動狀態下的相匹配,防止在切換后旋鈕控制的轉速為0,高壓沖水泵停止運行。
5 結語
本文設計的耙吸挖泥船全自動與手動疏浚系統切換方法已實際應用于“新海虎8”號輪上,保證了整個疏浚系統的容錯性,實現了全自動疏浚系統和手動疏浚系統之間安全高效的切換。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
