基于圖像處理技術的可視化干涉條紋處理計數系統
2018-09-26 11:30:48楊亞賓
軟件導刊 2018年7期
楊亞賓

摘要:為了解決傳統實驗與測量應用中,由測量人員肉眼觀察并記錄干涉條紋變化信息過程中存在的易出錯、效率低、勞動強度大等問題,采用計算機圖像處理技術提供一種便捷高效的解決方案,通過圖像采集與處理,設計干涉條紋處理計數系統。該系統選用CMOS攝像頭實時采集干涉條紋圖樣,運用VC++6.0編寫圖像處理程序對干涉條紋圖樣優化處理,最終實現自動計數。經驗證,干涉條紋計數系統計數準確、性能穩定、效率高,可減輕勞動強度、提高測量精度、滿足應用需求。
關鍵詞:干涉條紋;圖像處理;VC++6.0;自動計數
DOI:10.11907/rjdk.172992
中圖分類號:TP319
文獻標識碼:A文章編號:1672-7800(2018)007-0153-05
Abstract:Inthetraditionalexperimentsandmeasurementapplication,theproblemsoferror-proneness,lowefficiencyandhighlaborintensityexistintheprocessofobservingandrecordingtheinformationofinterferencefringechangesbythemeasurementpersonnel.Inordertosolvetheproblems,thispaperusesthecomputerimageprocessingtechnologytoprovideaconvenientandefficientsolution,bywhichwedesigninterferencefringeprocessingcountingsystemthroughtheimageacquisitionandprocessing.ThesystemusestheCMOScameratocollecttheinterferencefringepatterninrealtime,employsVC++6.0towritetheimageprocessingprogramtooptimizetheinterferencefringepatternandfinallyrealizetheautomaticcounting.Experimentsshowthatthedesignedinterferencefringecountingsystemisofstableperformance,accurateandhighlyefficient.Itcanreducethelaborintensity,improvethemeasurementaccuracyandmeettheapplicationrequirements.
KeyWords:interferencefringes;imageprocessing;VC++6.0;automaticcounting
0引言
光的干涉現象在測量和生活中有廣泛應用,在光學部件精密測量、增透光薄膜制備、軸承滾珠分類和檢測以及測定物質折射率方面有極其重要的作用。干涉條紋處理計數系統使用邁克爾遜干涉儀,其結構簡單,精度高,可用來測定微小的長度變化、材料的折射率、光的波長等。然而,在運用干涉儀器時,關于干涉條紋信息的觀察與記錄由測量人員通過目測完成,存在諸多問題與不便,如因視覺暫留和視覺疲勞引起計數錯誤以及多次測量來降低測量誤差所導致的效率低等問題。本文在現代電子技術和圖像處理技術的基礎上,開發了一套可視化的干涉條紋自動計數系統,可對傳統的計數方式進行改進,對現有干涉計數儀器進行優化,極大地提高測量精度與效率。
1干涉條紋測量理論基礎
1.1邁克爾遜干涉儀結構
邁克爾遜干涉儀如圖1所示,S為單色激光光源,M1、M2為平面反射鏡,平面鏡M2固定,M1可通過精密旋鈕前后移動。A為分光板,B為補償板。補償板B使經過分光板A分出的兩束光都通過3次玻璃,減小兩束光的光程差,提高兩束光的空間相干性,消除色散的影響,使干涉圖樣更加清晰。O點為干涉條紋觀察點。光源S發出的光線與平面鏡M2垂直,與平面鏡M1平行。分光板和補償板與平面鏡M1、M2成45°角。M2′為M2光路上的等效位置。兩束光的干涉等效于M1與M2′之間空氣薄膜產生的干涉。
1.2干涉條紋測量原理
在干涉圖樣中隨機去一點,假設該點條紋級數為m。當該點由亮變暗再變亮時,該點的條紋級數由m級變為m+1級(或m-1級)。在已知光的波長λ的情況下,根據公式Δd=λ/2,可得移動距離。同理當有N條亮條紋經過該點時可得公式:Δd=Nλ/2。因此可以通過記錄經過干涉圖樣上某點的條紋數計算平面反光鏡的移動距離。
2數字圖像采集系統設計
2.1采集系統結構與硬件選用
本文所設計的圖像采集系統由光學成像和圖像采集兩部分組成。光學成像部分由邁克爾遜干涉儀光路部分完成,圖像采集部分由CMOS網絡攝像頭和電腦完成。數字圖像采集系統就是通過光敏傳感器將圖像的光信號轉化為電信號,再用AD轉換器將電信號轉化為數字信號。然后經過數字芯片處理將數字信號編碼形成一定格式的圖像,通過數據接口傳輸到計算機進行處理和存儲。
數字成像的核心是圖像傳感器。目前,圖像采集系統常用CCD攝像機搭配圖像采集卡,其成本較為昂貴。CMOS圖像傳感器具有價格低、功耗小,數據采集速度較快等特點,能滿足系統的使用需求其主要指標包括:幀速30幀/s;分辨率640×480。
2.2干涉圖樣獲取
2.2.1圖樣采集
將連續變化的圖像在空間坐標上進行離散化處理。所選取的采樣點稱之為像素,由采樣點的值所組成的矩陣可表示為:
2.2.3圖樣存儲
本文采集和處理的是常見的BMP格式圖片。BMP格式是一種無壓縮位圖格式。它在結構上由文件頭、位圖信息頭、顏色表和圖像數據4部分組成。
其中,位圖數據記錄著每一個像素的值,記錄順序為從左到右,從上到下。當biBitCount=1時,8個像素為1字節;當biBitCount=4時,2個像素為1字節;當biBitCount=8時,1個像素為1字節;當biBitCount=24時,1個像素為3字節。
3圖像處理與測量
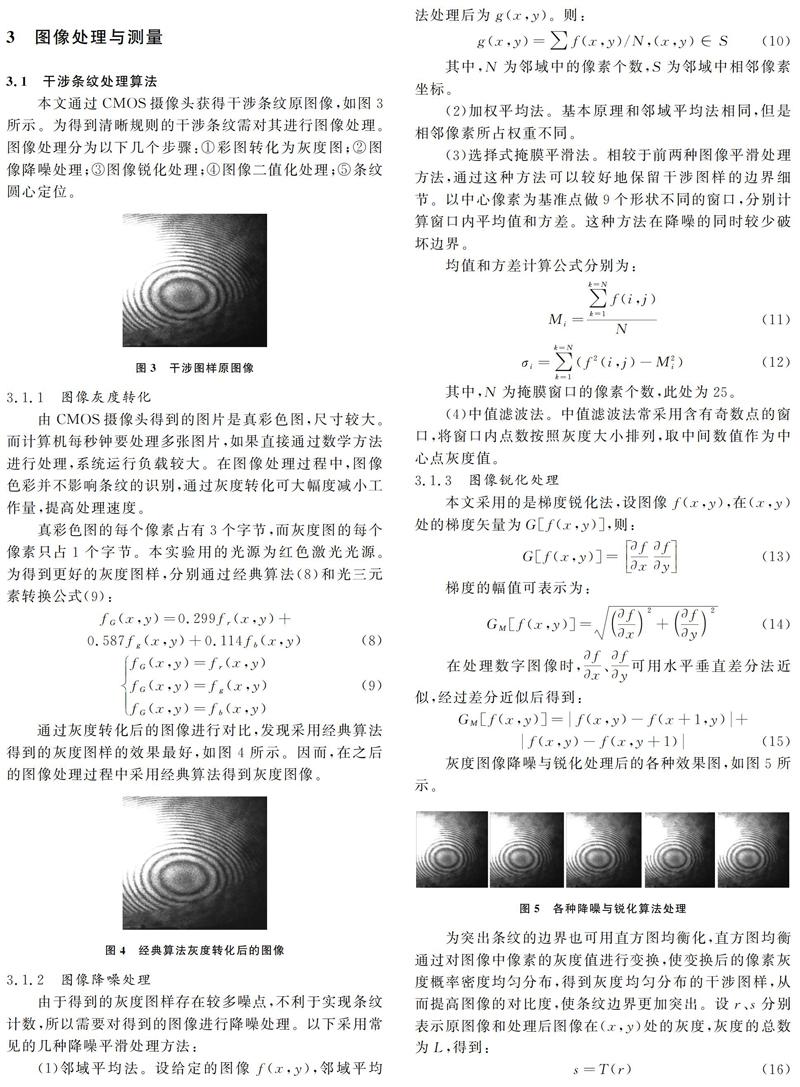
3.1干涉條紋處理算法
本文通過CMOS攝像頭獲得干涉條紋原圖像,如圖3所示。為得到清晰規則的干涉條紋需對其進行圖像處理。圖像處理分為以下幾個步驟:①彩圖轉化為灰度圖;②圖像降噪處理;③圖像銳化處理;④圖像二值化處理;⑤條紋圓心定位。
3.1.1圖像灰度轉化
由CMOS攝像頭得到的圖片是真彩色圖,尺寸較大。而計算機每秒鐘要處理多張圖片,如果直接通過數學方法進行處理,系統運行負載較大。在圖像處理過程中,圖像色彩并不影響條紋的識別,通過灰度轉化可大幅度減小工作量,提高處理速度。
真彩色圖的每個像素占有3個字節,而灰度圖的每個像素只占1個字節。本實驗用的光源為紅色激光光源。為得到更好的灰度圖樣,分別通過經典算法(8)和光三元素轉換公式(9):
通過灰度轉化后的圖像進行對比,發現采用經典算法得到的灰度圖樣的效果最好,如圖4所示。因而,在之后的圖像處理過程中采用經典算法得到灰度圖像。
3.1.2圖像降噪處理
由于得到的灰度圖樣存在較多噪點,不利于實現條紋計數,所以需要對得到的圖像進行降噪處理。以下采用常見的幾種降噪平滑處理方法:
(2)加權平均法。基本原理和鄰域平均法相同,但是相鄰像素所占權重不同。
(3)選擇式掩膜平滑法。相較于前兩種圖像平滑處理方法,通過這種方法可以較好地保留干涉圖樣的邊界細節。以中心像素為基準點做9個形狀不同的窗口,分別計算窗口內平均值和方差。這種方法在降噪的同時較少破壞邊界。
(4)中值濾波法。中值濾波法常采用含有奇數點的窗口,將窗口內點數按照灰度大小排列,取中間數值作為中心點灰度值。
3.1.3圖像銳化處理
灰度圖像降噪與銳化處理后的各種效果圖,如圖5所示。
為突出條紋的邊界也可用直方圖均衡化,直方圖均衡通過對圖像中像素的灰度值進行變換,使變換后的像素灰度概率密度均勻分布,得到灰度均勻分布的干涉圖樣,從而提高圖像的對比度,使條紋邊界更加突出。設r、s分別表示原圖像和處理后圖像在(x,y)處的灰度,灰度的總數為L,得到:
T(r)為變換函數,變換函數要滿足兩個條件。第一個是T(r),屬于單調函數,從而保證變換后圖像的灰度等級依然保持原順序;第二個變換前后的定義域相同。
圖像的灰度值可以看成隨機變量。設圖像有N個像素點,nk為第k級灰度的像素點數;rk表示第k個灰度等級,則灰度值在rk等級的像素出現概率為:
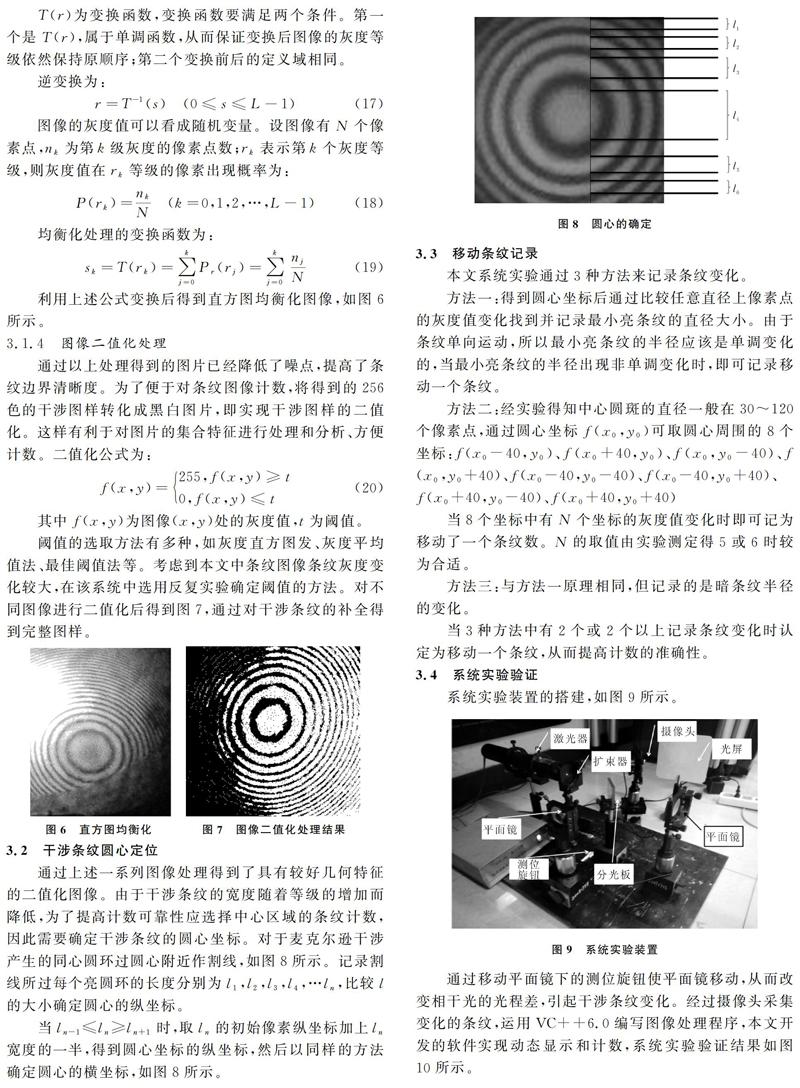
利用上述公式變換后得到直方圖均衡化圖像,如圖6所示。
3.1.4圖像二值化處理
通過以上處理得到的圖片已經降低了噪點,提高了條紋邊界清晰度。為了便于對條紋圖像計數,將得到的256色的干涉圖樣轉化成黑白圖片,即實現干涉圖樣的二值化。這樣有利于對圖片的集合特征進行處理和分析、方便計數。二值化公式為:
閾值的選取方法有多種,如灰度直方圖發、灰度平均值法、最佳閾值法等。考慮到本文中條紋圖像條紋灰度變化較大,在該系統中選用反復實驗確定閾值的方法。對不同圖像進行二值化后得到圖7,通過對干涉條紋的補全得到完整圖樣。
3.2干涉條紋圓心定位
通過上述一系列圖像處理得到了具有較好幾何特征的二值化圖像。由于干涉條紋的寬度隨著等級的增加而降低,為了提高計數可靠性應選擇中心區域的條紋計數,因此需要確定干涉條紋的圓心坐標。對于麥克爾遜干涉產生的同心圓環過圓心附近作割線,如圖8所示。記錄割線所過每個亮圓環的長度分別為l1,l2,l3,l4,…ln,比較l的大小確定圓心的縱坐標。
當ln-1≤ln≥ln+1時,取ln的初始像素縱坐標加上ln寬度的一半,得到圓心坐標的縱坐標,然后以同樣的方法確定圓心的橫坐標,如圖8所示。
3.3移動條紋記錄
本文系統實驗通過3種方法來記錄條紋變化。
方法一:得到圓心坐標后通過比較任意直徑上像素點的灰度值變化找到并記錄最小亮條紋的直徑大小。由于條紋單向運動,所以最小亮條紋的半徑應該是單調變化的,當最小亮條紋的半徑出現非單調變化時,即可記錄移動一個條紋。
方法二:經實驗得知中心圓斑的直徑一般在30~120個像素點,通過圓心坐標f(x0,y0)可取圓心周圍的8個坐標:f(x0-40,y0)、f(x0+40,y0)、f(x0,y0-40)、f(x0,y0+40)、f(x0-40,y0-40)、f(x0-40,y0+40)、f(x0+40,y0-40)、f(x0+40,y0+40)
當8個坐標中有N個坐標的灰度值變化時即可記為移動了一個條紋數。N的取值由實驗測定得5或6時較為合適。
方法三:與方法一原理相同,但記錄的是暗條紋半徑的變化。
當3種方法中有2個或2個以上記錄條紋變化時認定為移動一個條紋,從而提高計數的準確性。
3.4系統實驗驗證
系統實驗裝置的搭建,如圖9所示。
通過移動平面鏡下的測位旋鈕使平面鏡移動,從而改變相干光的光程差,引起干涉條紋變化。經過攝像頭采集變化的條紋,運用VC++6.0編寫圖像處理程序,本文開發的軟件實現動態顯示和計數,系統實驗驗證結果如圖10所示。
4結語
本文采用CMOS攝像頭,運用圖像傳感技術、圖像處理計數、計算機編程,在邁克爾遜干涉儀基礎上實現了計算機自動記錄干涉條紋移動數目,開發了基于圖像處理技術的可視化自動計數系統,為干涉條紋自動計數提供了新的方法。以COMS攝像頭和計算機硬件為基礎,通過實時采集和處理干涉圖樣得到條紋變化,提高了測量效率,降低了測量誤差并且減輕測量人員的勞動強度,可用于現有干涉計數儀器的升級改造。
參考文獻:
[1]何勇,王青,朱日宏等.Windows環境下干涉圖像采集和處理[J].紅外與激光工程,2003,32(2).203-206.
[2]WERMESN.DepletedCMOSpixelsforLHCproton-protonexperiments[J].NuclearInstrumentsandMethodsinPhysicsResearch,2016(824):483-486.
[3]MAHAKUDR,PRAKASHO,DIXITSK,etal.AnalysisonthelaserbeampointinginstabilityinducedfringeshiftandcontrastdilutionfromdifferentinterferometersusedforwritingfiberBragggrating[J].OpticsCommunications,2009(282):2204-2211.
[4]SEJZEIAH,JAMZADM.EvaluationofvariousdigitalimageprocessingtechniquesfordetectingcriticalcrescentmoonandintroducingCMD-Atoolforcriticalcrescentmoondetection[J].Optik-InternationalJournalforLightandElectronOptics,2016,127(3):1511-1525.
[5]尤政,李濤.CMOS圖像傳感器在空間技術中的應用[J].光學技術,2002,28(1):3-35.
[6]雷玉堂.光電檢測技術[M].北京:中國計量出版社,1997
[7]T.帕夫利迪斯.計算機圖形顯示和圖像處理的算法[M].北京:科學出版社,1987.
[8]JOHAND,BENOITP.Rigidimageregistrationbygeneraladaptiveneighborhoodmatching[J].PatternRecognition,2016(55):45-57.
[9]鄢靜舟.干涉圖特征信息自動采集方法[J].光學技術,2000,26(1):71-75.
[10]PEREZ-RODRIGUEZJ,ARRO-PENAAG,GARCIA-PEDRAJASN.Simultaneousinstanceandfeatureselectionandweightingusingevolutionarycomputation:proposalandstudy[J].AppliedSoftComputing,2015(37):416-443.
[11]SUNUPRAPTOH,DANOEDOROP,SUR.Evaluationofpan-sharpeningmethod:appliedtoartisanalgoldminingmonitoringinGunungPaniforestarea[J].ProcediaEnvironmentalSciences,2016(33):230-238.
[12]WANGW,CHENC,MICHAELKNG.Animagepixelbasedvariationalmodelforhistogramequalization[J].JournalofVisualCommunicationandImageRepresentation,2016(34):118-134.
(責任編輯:江艷)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45