板球系統(tǒng)的PSO優(yōu)化模糊RBF神經(jīng)網(wǎng)絡(luò)PID參數(shù)研究
2018-09-26 11:30:48王長正向鳳紅毛劍琳
軟件導(dǎo)刊 2018年7期
王長正 向鳳紅 毛劍琳

摘要:板球系統(tǒng)是一個典型的多變量、非線性控制系統(tǒng)。針對板球系統(tǒng)在PID控制中震蕩大、精度低、實時性差等問題,應(yīng)用拉格朗日方程對板球系統(tǒng)在忽略干擾因素條件下進行數(shù)學(xué)建模,采用粒子群算法對模糊RBF神經(jīng)網(wǎng)絡(luò)初始參數(shù)進行優(yōu)化,并設(shè)計RBF神經(jīng)網(wǎng)絡(luò)與模糊PID控制相結(jié)合的控制方法。在MATALB環(huán)境下完成板球系統(tǒng)定位實驗,仿真結(jié)果表明,經(jīng)粒子群優(yōu)化模糊RBF神經(jīng)網(wǎng)絡(luò)的PID參數(shù)后,提高了板球系統(tǒng)的定位精度,并增強了系統(tǒng)控制的實時性。
關(guān)鍵詞:板球系統(tǒng);粒子群算法;模糊RBF神經(jīng)網(wǎng)絡(luò);MATLAB;PID
DOI:10.11907/rjdk.173124
中圖分類號:TP301
文獻標識碼:A文章編號:1672-7800(2018)007-0014-05
Abstract:Ballandplatesystemisamultivariable,nonlinearandcomplexunderactuateddynamicsystem.Accordingtothefixed-pointcontrolofballandplatesystem,weestablishthemathematicalmodeloftheLagrangeequationignoringtheinterferencefactorsofballandplatesystem.Aimingattheproblemsinballandplatefixed-pointcontrolsystem,suchasconcussion,lowprecisionandpoorreal-time,wedesignthecontrolmethodbycombiningRBFneuralnetworkwithfuzzyPIDcontrol,andtheinitialparametersoffuzzyRBFneuralnetworkareoptimizedbyparticleswarmoptimization.ThepositioningcontrolsimulationexperimentofballandplatesystemiscompletedinMATLABenvironment,thesimulationresultsshowthatPIDparametersoffuzzyRBFneuralnetworkwhichoptimizedbyparticleswarmoptimizationcanimprovetheprecisionoftheballandplatesystemfixed-pointcontrolandthereal-timenessofthesystem.
KeyWords:ballandplatesystem;particleswarmoptimization;fuzzyRBFneuralnetwork;MATLAB;PID
0引言
板球系統(tǒng)是一個典型的非線性系統(tǒng),具有強耦合、欠驅(qū)動和無約束的特點,是球桿系統(tǒng)的二維擴展,可用于驗證控制算法的有效性。板球系統(tǒng)也是欠驅(qū)動系統(tǒng)的典型代表,對其控制算法的研究可以提高實際系統(tǒng)的可靠性。因此,自20世紀80年代以來,很多學(xué)者開始將板球系統(tǒng)作為控制領(lǐng)域驗證各種控制算法的benchmark對象[1-5]。文獻[6]采用直接自適應(yīng)模糊控制與滑模控制相結(jié)合的方式,引入蟻群算法對系統(tǒng)參數(shù)進行優(yōu)化,減弱了板球系統(tǒng)軌跡跟蹤控制中的震蕩,提高了板球系統(tǒng)的軌跡跟蹤精度;文獻[7]設(shè)計一種間接模糊自適應(yīng)控制器,將監(jiān)督、間接模糊自適應(yīng)與自適應(yīng)補償3種控制算法相結(jié)合,保證了板球系統(tǒng)的穩(wěn)定性并減小誤差至零鄰域內(nèi);文獻[8]設(shè)計基于粒子群算法優(yōu)化PID參數(shù)的控制器,對PID參數(shù)進行在線調(diào)節(jié),并通過在球桿系統(tǒng)上的驗證,顯示了智能優(yōu)化算法在PID參數(shù)調(diào)節(jié)中的優(yōu)越性,但對于強耦合、非線性板球系統(tǒng),智能優(yōu)化算法仍存在局部搜索能力弱與非線性逼近能力差的缺點。因此,設(shè)計一種高效控制器,對提高板球的控制跟蹤精度具有重要意義。
為提高板球系統(tǒng)的控制精度,本文將善于表達模糊和定性知識,具有人類思維推理方式的模糊邏輯與具有自組織、自適應(yīng)能力的RBF(RadialBasisFunction)神經(jīng)網(wǎng)絡(luò)相結(jié)合,并采用粒子群算法對模糊RBF神經(jīng)網(wǎng)絡(luò)進行優(yōu)化,設(shè)計了模糊RBF神經(jīng)網(wǎng)絡(luò)PID控制器,從而改善了模糊控制器依賴度強、缺乏自學(xué)自能力的缺點。最后使用PID控制器與本文提出的算法完成對板球系統(tǒng)的定位控制實驗,通過實驗結(jié)果對比驗證本文算法的有效性。
1板球系統(tǒng)建模
本實驗采用固高GBP2001型板球系統(tǒng)作為實驗平臺,板球系統(tǒng)物理模型如圖1所示,板球系統(tǒng)各項參數(shù)如表1所示。板球系統(tǒng)因其自身的復(fù)雜性,建模過程中作以下4點假設(shè)對模型進行簡化與線性化:①小球在平板上沒有滑動和繞小球垂直中心軸旋轉(zhuǎn)的運動;②不考慮板的角度和面積限制;③小球和平板始終接觸;④忽略小球和平板間的所有摩擦。
基于以上假設(shè)建立模型,利用牛頓定律或拉格朗日方程[9],通過動力學(xué)分析,可得到如式(1)、式(2)所示的完整非線性耦合的板球系統(tǒng)動力學(xué)方程。
式(1)、式(2)建立的非線性模型在線性控制的實際操作中難以應(yīng)用,因此將其線性化,得到:
2粒子群算法
2.1粒子群算法描述
2.2基于PSO優(yōu)化模糊RBF神經(jīng)網(wǎng)絡(luò)的方法
采用PSO算法對模糊RBF神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練,在粒子編碼中寫入模糊隸屬度函數(shù)的中心值、寬度和連接權(quán)值,并進行連續(xù)迭代找到最優(yōu)值作為網(wǎng)絡(luò)參數(shù),然后通過網(wǎng)絡(luò)學(xué)習得到目標網(wǎng)絡(luò)。
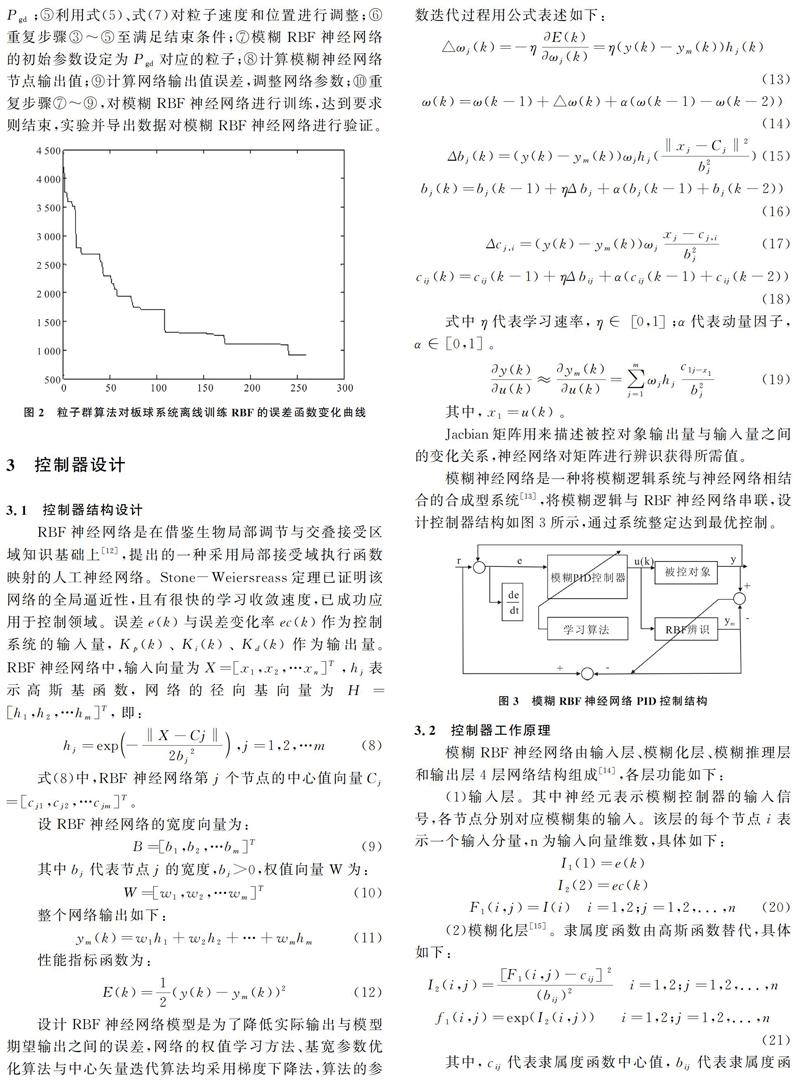
基于粒子群優(yōu)化的模糊RBF神經(jīng)網(wǎng)絡(luò)學(xué)習算法按以下步驟進行[11]:①粒子群總數(shù)為100,迭代次數(shù)為260次,權(quán)重因子c1=c2=2,粒子搜索定義域(-Xmax,Xmax),初始化粒子速度和位置;②按式(9)計算粒子適應(yīng)度,Pid為粒子初始化位置,Pgd為適應(yīng)度最小的粒子;③對比每個粒子當前適應(yīng)度與初始化位置Pid,若更優(yōu),則更新Pid;④對比每個粒子Pid與Pgd的適應(yīng)度,若更優(yōu),則更新Pgd;⑤利用式(5)、式(7)對粒子速度和位置進行調(diào)整;⑥重復(fù)步驟③~⑤至滿足結(jié)束條件;⑦模糊RBF神經(jīng)網(wǎng)絡(luò)的初始參數(shù)設(shè)定為Pgd對應(yīng)的粒子;⑧計算模糊神經(jīng)網(wǎng)絡(luò)節(jié)點輸出值;⑨計算網(wǎng)絡(luò)輸出值誤差,調(diào)整網(wǎng)絡(luò)參數(shù);⑩重復(fù)步驟⑦~⑨,對模糊RBF神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練,達到要求則結(jié)束,實驗并導(dǎo)出數(shù)據(jù)對模糊RBF神經(jīng)網(wǎng)絡(luò)進行驗證。
3控制器設(shè)計
3.1控制器結(jié)構(gòu)設(shè)計
設(shè)計RBF神經(jīng)網(wǎng)絡(luò)模型是為了降低實際輸出與模型期望輸出之間的誤差,網(wǎng)絡(luò)的權(quán)值學(xué)習方法、基寬參數(shù)優(yōu)化算法與中心矢量迭代算法均采用梯度下降法,算法的參數(shù)迭代過程用公式表述如下:
Jacbian矩陣用來描述被控對象輸出量與輸入量之間的變化關(guān)系,神經(jīng)網(wǎng)絡(luò)對矩陣進行辨識獲得所需值。
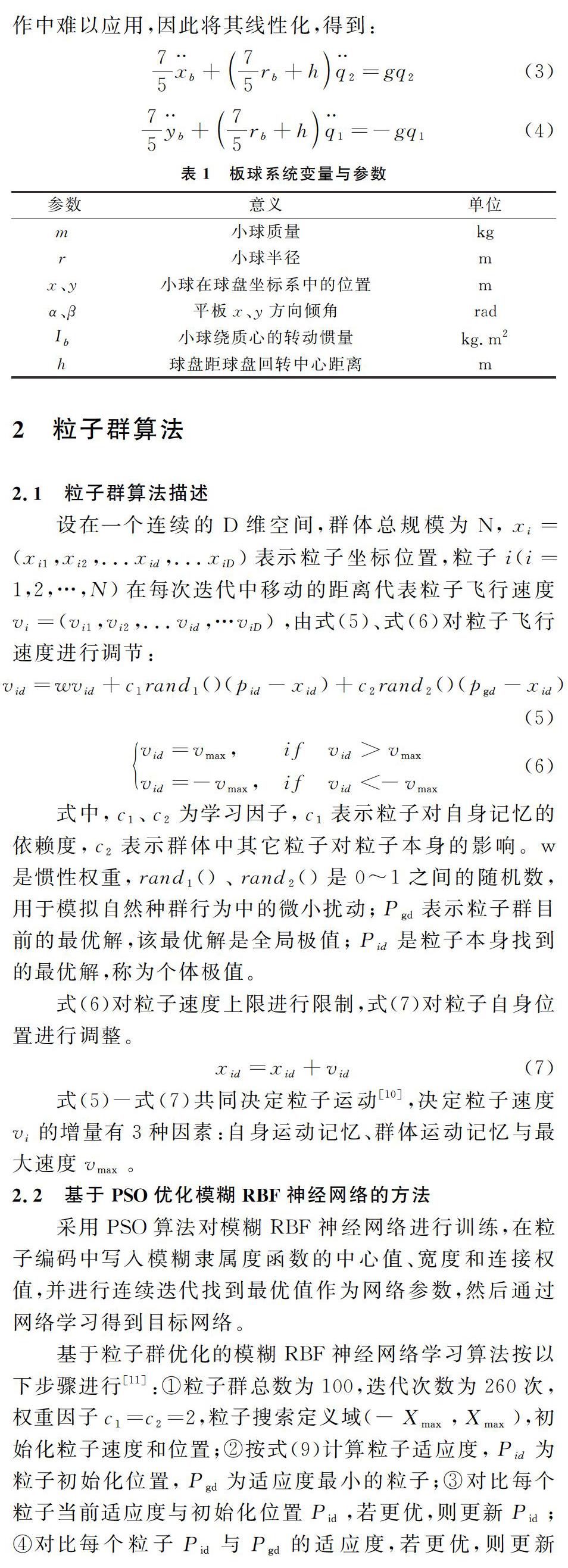
模糊神經(jīng)網(wǎng)絡(luò)是一種將模糊邏輯系統(tǒng)與神經(jīng)網(wǎng)絡(luò)相結(jié)合的合成型系統(tǒng)[13],將模糊邏輯與RBF神經(jīng)網(wǎng)絡(luò)串聯(lián),設(shè)計控制器結(jié)構(gòu)如圖3所示,通過系統(tǒng)整定達到最優(yōu)控制。
3.2控制器工作原理
模糊RBF神經(jīng)網(wǎng)絡(luò)由輸入層、模糊化層、模糊推理層和輸出層4層網(wǎng)絡(luò)結(jié)構(gòu)組成[14],各層功能如下:
(3)模糊推理層。模糊化層與模糊推理層相互連接,達到模糊規(guī)則準確匹配的目的,節(jié)點之間進行模糊運算。
4板球系統(tǒng)仿真實驗
為了驗證本文提出的控制方法,本次實驗采用固高GBP2001型板球系統(tǒng)作為實驗平臺,按照圖2所示的結(jié)構(gòu)搭建控制系統(tǒng)。初始PID參數(shù)為Kp=0,Ki=0和Kd=0,RBF神經(jīng)網(wǎng)的隱含層節(jié)點數(shù)目為6。在上述參數(shù)設(shè)定條件下,利用本文設(shè)計的模糊RBF-PID控制器對固高GBP2001型板球系統(tǒng)進行仿真實驗,其中控制參數(shù)Kp、Ki和Kd在控制過程中輸入輸出間的RBF-PID參數(shù)變化曲線如圖5所示,板球系統(tǒng)的小球位置跟蹤變化曲線如圖6所示。
設(shè)計PID控制器并以定位小球于板的中心為控制目標,圖7顯示了PID控制器控制系統(tǒng)的輸出效果。小球在板上的誤差變化趨勢如圖7(a)所示,小球運動軌跡如圖7(b)所示。可以看出小球在板上的位移偏差較大,在實際系統(tǒng)控制中已經(jīng)觸碰球板邊緣,系統(tǒng)運行10s后,小球在板上達到穩(wěn)定狀態(tài)。
設(shè)計模糊RBF-PID控制器,在板球系統(tǒng)的實際操作中導(dǎo)出小球運行結(jié)果數(shù)據(jù)并進行分析。圖8顯示了模糊RBF-PID控制器的控制系統(tǒng)輸出效果,小球的位置跟蹤誤差變化如圖8(a)所示,小球在板上運動軌跡如圖8(b)所示。由圖可以看出,小球在板上的位移偏差減小了很多,運動軌跡較為簡潔,達到穩(wěn)定狀態(tài)的時間縮短至6s。
PID控制與模糊RBF-PID的控制結(jié)果對比如表2所示。從表中可以看出,模糊RBF-PID控制器相較于PID控制器效果更好,精確度和時效性都有一定程度提高。
5結(jié)語
由于板球系統(tǒng)具有多變量、開環(huán)不穩(wěn)定和非線性等特性,被廣泛應(yīng)用于控制算法研究中,其中定位控制研究對非線性系統(tǒng)控制的理論研究具有重要意義。本文采用基于粒子群算法優(yōu)化的模糊RBF-PID控制方法對板球系統(tǒng)進行定位控制,仿真驗證了粒子群算法的引入可提高板球系統(tǒng)定位控制的穩(wěn)定性和精度,并增強了板球系統(tǒng)控制的實時性。下一步工作是建立更精確的板球系統(tǒng)數(shù)學(xué)模型,包括球板間摩擦與傳動機構(gòu)、步進電機等環(huán)節(jié),完成板球系統(tǒng)的軌跡跟蹤,從而實現(xiàn)小球在板上的避障運動。
參考文獻:
[1]HANKW,TIANYT,KONGYS,etal.TrackingcontrolofballandplatesystemusingaimprovedPSOon-linetrainingPIDneuralnetwork[C].2012IntConfonMechatronicsandAutomation.NewYork:CurranAssociates,2012:2297-2302.
[2]王紅睿,田彥濤.板球系統(tǒng)的參數(shù)自調(diào)整反步控制[J].控制與決策,2009,24(5):749-753.
[3]王紅睿,田彥濤.一類欠驅(qū)動系統(tǒng)的非線性輸出跟蹤控制[J].控制與決策,2011,26(6):953-956.
[4]段慧達,田彥濤,李津松,等.一類高階非線性系統(tǒng)的級聯(lián)自抗擾控制[J].控制與決策,2012,27(6):216-220.
[5]TIANYT,BAIM,SUJT.Anon—linearswitchingcontrollerforballandplatesystem[J].InternationalJournalofModelling,IdentificationandControl,2006(3):177-182.
[6]翟晨汐,李洪興.板球系統(tǒng)的直接自適應(yīng)模糊滑模控制[J].計算機仿真,2016,33(2):383-388.
[7]韓京元.非線性板球系統(tǒng)的監(jiān)督分層智能自適應(yīng)控制算法研究[D].長春:吉林大學(xué),2014.
[8]RANAMA,USMANZ,SHAREEFZ.Automaticcontrolofballandbeamsystemusingparticleswarmoptimization[C].InternationalSymposiumonComputationalIntelligenceandInformatics,2011:529-534.
[9]趙艷花,邵鴻翔.基于視覺的板球控制系統(tǒng)研究[J].自動化技術(shù)與應(yīng)用,2011,30(10):12-15.
[10]徐云云.基于視覺的板球控制系統(tǒng)算法研究[D].成都:西華大學(xué),2012.
[11]段明秀.基于PSO優(yōu)化的模糊RBF神經(jīng)網(wǎng)絡(luò)學(xué)習算法及其應(yīng)用[J].當代教育理論與實踐,2012,2(1):101-104.
[12]李煒,張美玲.基于模糊RBF神經(jīng)網(wǎng)絡(luò)的管道泄漏檢測方法[J].蘭州理工大學(xué)學(xué)報,2009,35(6):79-83.
[13]胥良,郭林,梁亞,等.基于模糊RBF神經(jīng)網(wǎng)絡(luò)的智能PID控制[J].工業(yè)儀表與自動化裝置,2015(6):67-75.
[14]於東軍,王士同.模糊神經(jīng)網(wǎng)絡(luò)模型及其建模應(yīng)用研究[J].華東船舶工業(yè)學(xué)院學(xué)報,1998,12(2):22-28.
[15]張巍.基于差分演化算法的電梯群智能控制系統(tǒng)研究[D].沈陽:東北大學(xué),2008.
(責任編輯:黃健)