單相并網逆變器并聯運行相位系統研究
2018-09-23 08:37:02蔣志軍鄭嘉龍
通信電源技術 2018年7期
楊 鴿,蔣志軍,鄭嘉龍,楊 玨
(1.四川水利職業技術學院 電力工程系,四川 成都611231;2.成都天奧電子股份有限公司,四川 成都610015)
0 引 言
化石能源(煤、石油等)已趨于枯竭,其消耗會產生大量廢物,對環境造成嚴重污染,成為人類可持續發展的阻礙。基于可再生能源(如太陽能、風能等)的分布式發電系統,近年來受到越來越多國家和地區的重視。并網逆變器作為可再生能源發電單元與電網之間的能量變換接口,對系統的安全、穩定和高質量運行具有十分重要的作用[1]。隨著系統容量增大,單個逆變器的容量已經不能滿足要求。采用更高容量的功率器件價格成本太高,為了提高系統的功率、可靠性和效率,逆變器可以并聯運行[2]。
電網的相位是逆變器并聯運行系統控制的參考基準,而高性能鎖相環系統能夠快速、準確地跟蹤電網瞬態變化,尤其是當電網存在畸變時,為逆變器的并聯提供參考信息。因此,鎖相環系統的研究具有十分重要的實際意義。
本文搭建了單相并網逆變器并聯運行的模型,分析了相位同步的重要性,在這個基礎上引出了鎖相環,對常用的幾種類型進行了介紹。以鎖相環為檢測相位的工具,提出了應用于并網逆變器并聯運行的相位同步系統,分析了該系統存在的相位差問題,基于CAN總線、DSP重新構建了相位平均系統,該系統能有效地解決相位差問題。
1 單相并網逆變器并聯運行模型
N個單相并網逆變器以共直流母線交流側直接并聯方式組成的并聯系統,如圖1所示。Udc為直流母線電壓,us為電網電壓,采用直流電壓中點O作為電壓參考點,L11、L12、Ln1、Ln2為逆變器1和逆變器 N 的濾波電感[3]。單相并網逆變器并聯運行時,逆變器之間的環流和逆變器與電網相位同步問題是首要考慮的兩個問題,而相位同步又是環流抑制的前提。
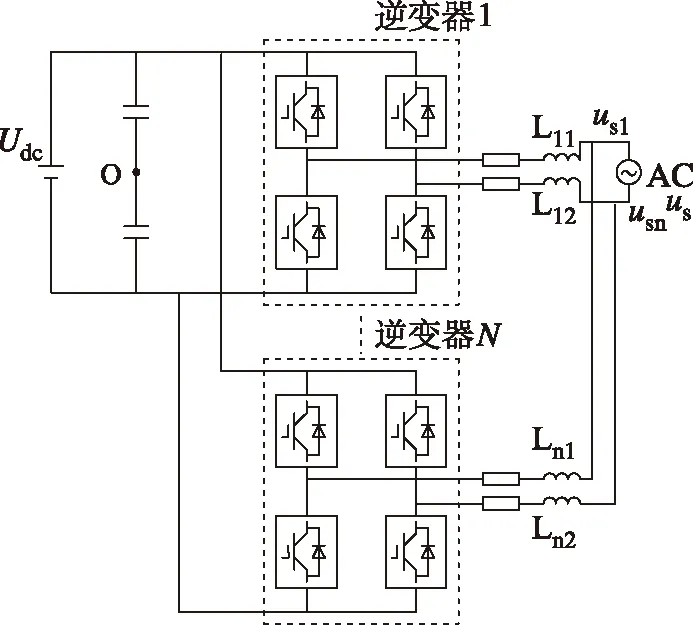
圖1 N個單相逆變器并聯運行拓撲結構
2 鎖相環概述
2.1 鎖相環原理
PLL的基本原理示意圖如圖2所示。它包含鑒相器(phase detector,PD)、環路濾波器(loop filter,LF)、壓控振蕩器(voltage controlled oscillator,VCO)等3個基本單元[4]。從圖中可以看出,PD對輸入信號ui(t)和輸出信號u0(t)進行相位比較,得到誤差信號ue(t)送入LF進行處理,得到的信號為u0(t),VCO根據uc(t)調整其輸出信號u0(t)的頻率,從而實現PLL輸出信號對輸入信號的閉環跟蹤。

圖2 PLL原理示意圖
2.2 鎖相環的分類及實現方式
鎖相環可以分為模擬鎖相環、數字鎖相環和軟件鎖相環。
模擬式集成鎖相環以NE/SE560系列最為常用,其在電路可靠性、穩定性和集成度方面存在相應的缺陷;數字鎖相環可由CMOS集成鎖相環CD/CC4046器件實現,而全數字鎖相環可由FPGA這種新型控制器實現[5]。數字鎖相環具有可靠性高,抗干擾能力強,易于集成等優點,但設計全數字邏輯鎖相難度很大。為了克服前兩種鎖相環的缺點,依托于DSP控制器的軟件鎖相環應運而生。軟件鎖相環具有程序易于修改,實現方便,算法基于瞬時無功功率,對輸入電壓能進行很好的跟蹤,尤其是當電壓發生畸變時。
應用于并網逆變器的軟件鎖相環有單同步坐標系軟件鎖相環(SSRF-SPLL)、增強型鎖相環(EPLL)、雙同步坐標系解耦鎖相環(DDSRF-SPLL)等[6]。單同步坐標系軟件鎖相環方法是基于跟蹤電網電壓的正序分量而提出的檢測算法。增強型鎖相環是一種基于對稱分量法提出的檢測算法。雙同步坐標系解耦軟件鎖相環方法(DDSRF-SPLL)是考慮電網電壓負序分量對傳統軟件鎖相環的影響而提出來的。
3 相位同步系統
定義電網電壓為:

式中,Um和θ分別為電網電壓幅值和相位。
鎖相環作為檢測電網相位θ的有力工具,由它構成的并網逆變器并聯運行的相位同步系統如圖3所示。鎖相環1、鎖相環2、…、鎖相環N對電網的相位進行檢測,生成電網相位角θ1、θ2、…、θn,并分別送給逆變器1、逆變器2、…、逆變器N,從而確定并網電流指令里的相位信息。但由于各個鎖相環實現的方法不同,使θ1、θ2、…、θn之間存在相位差,這樣會引起各個逆變器逆變的不同步,從而引起逆變器之間的環流、逆變器并入網側的不同步、對逆變器并聯運行系統的整體控制也變得困難,甚至會引起逆變器的損壞等諸多問題。
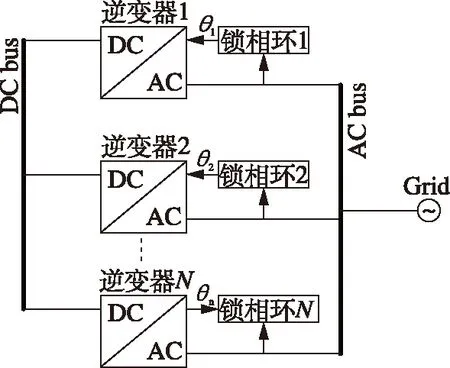
圖3 相位同步系統
4 基于CAN總線、DSP的相位平均系統
4.1 CAN總線簡介及特點
控制器局域網(CAN,Controller Area Network)最早由德國Bosch公司提出,為節省接線的工作量而專門為汽車工業設計的。CAN總線是一種性能先進、價格低廉、保密性好的現場總線,能有效支持分布式控制或實時控制的串行通信網絡。
CAN總線具有如下的主要技術特點:(1)多主總線;(2)非破壞性基于優先級的總線總裁技術;(3)可靠性高;(4)故障自動判斷;(5)具有多種傳送數據功能;(6)節點數目多;(7)傳輸介質豐富。CAN總線通信速率高、開放性好、糾錯能力強等優點在模塊化交直流電源系統、分布式發電系統中得到越來越多的應用[7]。
4.2 DSP簡介及特點
DSP是 Digital Signal Processor的縮寫,指數字信號處理器,其可以通過A/D器件對連續的模擬信號采樣,轉換成有一定時間間隔的離散信號,然后對這些信號進行量化,編碼,轉換成二進制編碼,也就是常說的數字信號,最終保存在寄存器中。
DSP數字控制技術具有性能穩定、成本低、運算速度快等特點,可以實現復雜的控制方法,能提高逆變器的性能和算法的精度,具有豐富的片內外設,可滿足不同控制應用要求,為實現高性能、高精度的數字控制提供解決方案。
4.3 相位平均系統的實現
本文在圖3相位同步系統的基礎上提出基于CAN總線、DSP的相位平均系統如圖4所示。相位的平均具體實現如下:由鎖相環生成的電網相位角θ1、θ2、…、θn分別作為CAN總線的節點1、節點2、…、節點n。這n個節點向CAN總線發送相應的相位,CAN總線接收到這些相位信息后送到逆變器1對應的控制器DSP1,DSP1作為CAN總線的節點n+1,DSP1進行相應的均相計算生成珋θ,生成的平均相位珋θ一方面傳送給逆變器1,另一方面同時通過節點n+1傳送到CAN總線。隨后CAN總線把珋θ分別傳送給節點n+2、…、節點2n。DSP2、…、DSPn作為CAN總線的節點n+2、…、節點2n,從而逆變器2、…、逆變器N得到相位珋θ。這樣每個并網逆變器單元得到的相位角就是一樣的,避免了圖3相位同步系統的相位差。珋θ的計算公式為:
通過增加一條CAN總線和n個DSP控制器不僅能實現相位的平均,而且各個逆變器模塊還可以通過CAN總線實現通信,讓各個獨立的模塊建立了相應的聯系,從而方便構建電力電子網絡控制系統和相應的監控系統[8]。
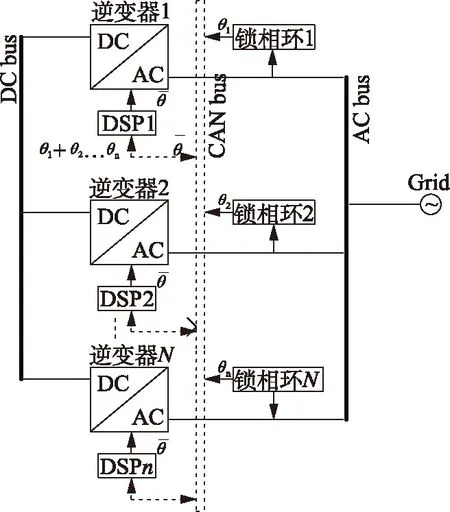
圖4 基于CAN總線、DSP的均相系統
5 結 論
(1)由鎖相環構成的單相并網逆變器并聯運行相位同步系統因鎖相環實現方法的多樣性而存在相位差,不利于相應的逆變器控制策略的實現。
(2)在由鎖相環構成的相位同步系統基礎上提出的基于CAN總線、DSP的平均相位系統,能有效解決前者的相位差問題,有利于相應控制策略的實現,也實現了N個并網逆變器的互聯,為電力電子網絡、監控、冗余系統打下基礎,也可以為相應的并網逆變器并聯運行相位系統提供參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25