非線性隨機參數對雙漸開線齒輪的影響分析
2018-09-20 02:14:54方志遠張秀文
機械制造 2018年4期
□ 方志遠 □ 張秀文
青島科技大學機電工程學院 山東青島 266061
1 研究背景
齒輪傳動廣泛應用于機械、汽車、航空航天及機器人等領域中,是一個復雜的非線性系統[1-2]。由于齒輪時變嚙合剛度和傳動中間隙的存在及其它因素,會導致齒輪系統產生復雜的動力學行為,其中包括準周期振動、混沌振動等[3-4],這些振動往往伴隨無規律的隨機振動。在齒輪加工過程中,由于環境、人為因素,每個齒輪的結構尺寸并不完全相同,從而導致在實際傳動過程中對運行結果產生影響[5]。因此,對于隨機參數對齒輪影響的研究是非常有必要的。
在很長一段時間內,國內外學者對隨機非線性系統進行了很多理論分析和試驗研究。WANG等[6]對非白噪聲誤差激勵下的齒輪傳動系統建模問題進行了深入討論。盧劍偉等[7]利用分岔圖及最大李雅普諾夫指數等,對考慮隨機裝配側隙的齒輪副系統動力學性能進行了分析。陳會濤等[5]建立了單對齒輪系統純扭轉非線性動力學模型,分析了齒輪綜合傳遞誤差波動和外部載荷對系統振幅和動態嚙合力的影響。Velex等[8]對非線性隨機參數系統的振動可靠度進行了計算。陳思雨等[9]研究了輪齒隨機間隙對齒輪系統動力學響應的影響。劉夢軍等[10]研究了分析系統非線性隨機動力特性及全局初值特性的方法。
分階式雙漸開線齒輪是綜合了漸開線齒輪和雙圓弧齒輪優點的一種新型齒輪[11],其與普通漸開線齒輪最大的區別在于工作齒廓由兩段相錯的漸開線組成,中間以一段圓弧包絡線或一段過渡曲線連接,齒頂與齒根兩段漸開線齒廓呈階梯式布置,而普通漸開線齒輪的工作齒廓僅由圓弧構成。
筆者建立基于雙漸開線齒輪傳動系統的扭轉振動力學模型,討論在隨機振動情況下嚙合阻尼比對雙漸開線齒輪擾動及系統動力學的影響。
2 雙漸開線齒輪振動模型
建立雙漸開線齒輪振動模型,需要根據齒輪的不同情況,綜合考慮嚙合剛度、輸入力矩、阻尼比、齒側間隙、激勵頻率等多種因素的隨機擾動。建模時不考慮齒面摩擦的情況,采用集中質量法。將雙漸開線齒輪振動模型簡化為齒輪副扭轉振動力學模型,如圖1所示。
圖1中,雙漸開線齒輪主動輪P和從動輪G的基圓半徑分別為Rp、Rg,將傳動軸、軸承和箱體等的支承剛度和阻尼系數分別用組合等效值 kpy、kgy、cpy、cgy來表示。mp和mg分別為主從動輪的質量,Ip和 Ig分別為主從動輪的轉動慣量,ωp和 ωg分別為主從動輪的激勵頻率,e為齒輪嚙合綜合誤差,km和cm分別為齒輪副嚙合的綜合剛度系數和綜合阻尼系數。
齒輪的靜態傳遞誤差e(t)是客觀存在且隨時間變化的周期函數,以嚙合頻率為基準對e(t)進行傅里葉級數展開:

式中:ωh為無量綱激勵頻率。
考慮到由e(t)引起的高頻內部激勵和由輸入扭矩波動引起的低頻外激勵,忽略輸出扭矩的波動,于是有:

式中:Tp為輸入扭矩;Tpm為輸入扭矩的平均值;Tpn(t)為輸入扭矩的變化值;Tg為輸出扭矩;Tgm為輸出扭矩的平均值。
雙漸開線齒輪振動模型具有4個自由度,分別為主從動輪繞旋轉中心的轉動自由度和沿Y軸方向的平移自由度,4 個自由度的振動位移分別為 θp、θg、yp、yg,速度分別為加速度分別為
根據推導,可以得到系統的分析表達式為:
式中:mp、mg、Ip、Ig分別為主從動輪的質量和轉動慣量;cpy和cgy分別為主從動輪的平移振動阻尼系數;kpy和kgy分別為主從動輪的平移振動剛度系數;βb為雙漸開線齒輪的螺旋角;Fg和Fg分別為主從動輪受到的外力。
根據式(4)~式(7),可以推導出:
對式(8)~式(11)進行無量綱化處理,令 x1=yp,x2=為齒輪傳動的相對扭轉位移,為齒輪傳動的相對扭轉速度,得到狀態方程:
式中:Fb1和Fb2分別為主從動輪軸上軸承對齒輪的無量綱作用力;k1和k2分別為主從動輪的無量綱嚙合剛度;c1Δ、c2Δ、c3Δ和 c4Δ分別為無量綱阻尼比的隨機擾動系數;c為無量綱阻尼比;Fah為齒輪綜合嚙合剛度誤差;FΔ為無量綱輸入力矩的隨機擾動量;ωΔ為無量綱激勵頻率的隨機擾動因數;Fm為無量綱切向平均作用力;kp(t)和 ky(t)分別為主從動輪嚙合剛度隨時間變化的函數;kpy(t)為主從動輪耦合后隨時間變化的函數;fh(x5)為齒輪嚙合非線性函數。
3 非線性動力學特性分析
不同的參數變量變化使系統的運動特性變化不同,所以在不同的參數情況下,系統會有不同的響應。當雙漸開線齒輪受到外界擾動時,系統響應特性會隨之發生變化。為了確定嚙合阻尼比作為隨機擾動因素對系統動力學性能的影響,首先不加入隨機擾動,分析動力學性能,然后加入隨機擾動,并與無隨機擾動的系統進行對比,從而得到不同隨機擾動情況下的系統嚙合阻尼規律。選用變步長的龍格-庫塔法對系統動力微分方程逐步積分,選取系統的無量綱參數如下:Fah=0.05,ωh=0.34,Fm=0.01,Fb1=0.2,Fb2=0.2,FΔ=0,k1=1.5,k2=1.5,ωΔ=0。取初始狀態 x1(0)=0,x2(0)=0,x3(0)=0,x4(0)=0,x5(0)=0,x6(0)=0,在隨機狀態下以嚙合阻尼為分岔參數,取c=0.18并依次減小嚙合阻尼的大小,令c1Δ=0.012,c2Δ=0.012,c3Δ=0.012,c4Δ=0.012。
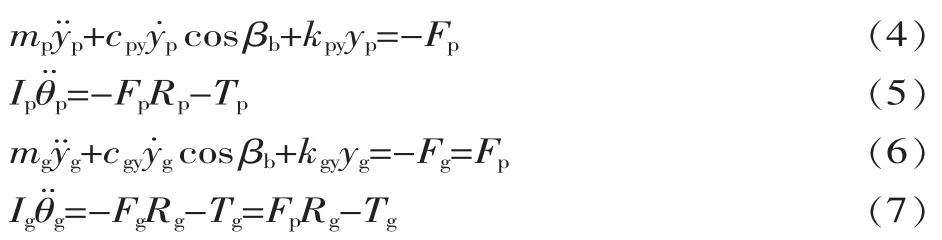
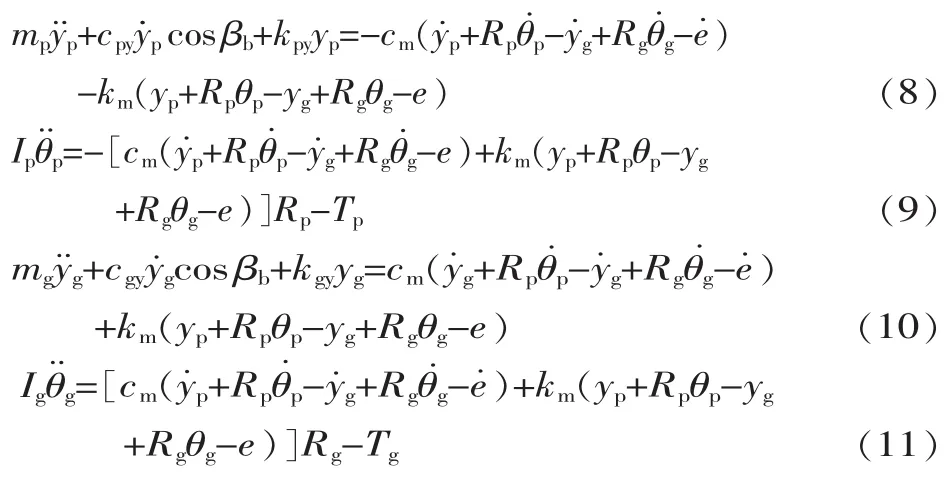
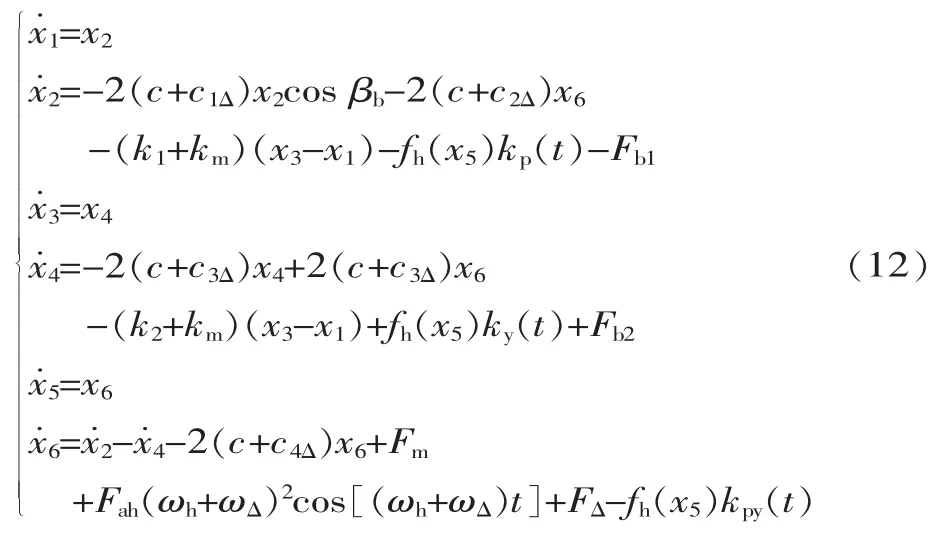
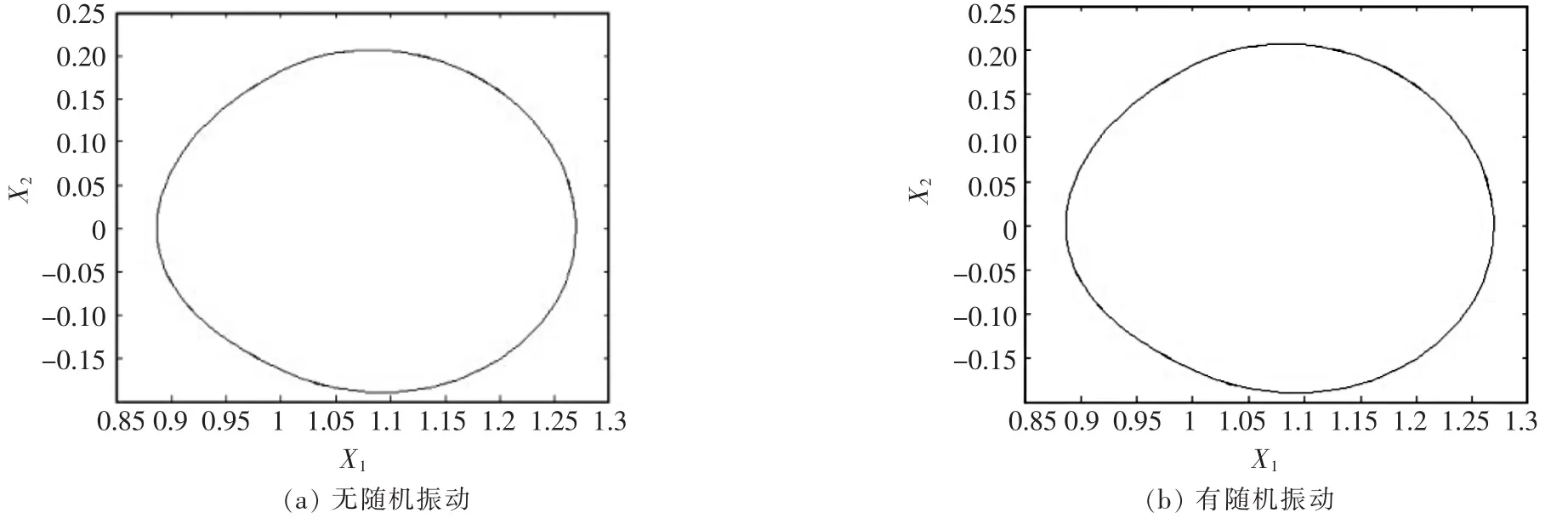
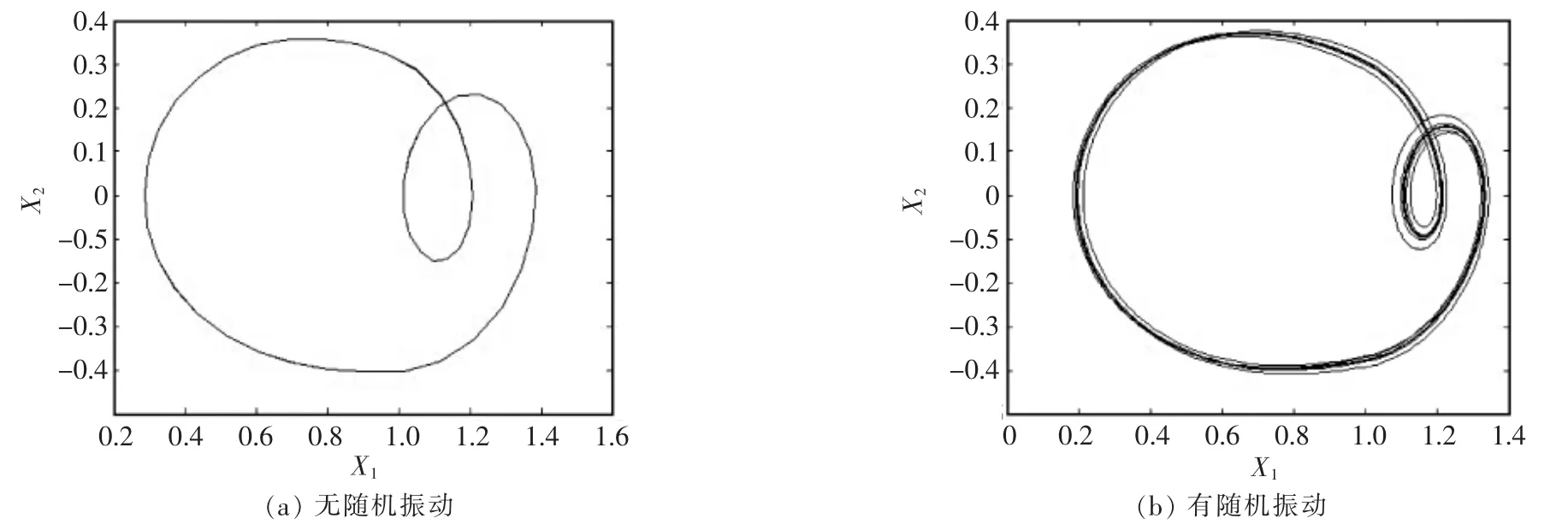
將所取數值代入式(12),利用四階龍格-庫塔法進行數值分析仿真,從而得到無隨機擾動和有隨機擾動兩種不同情況的系統動態響應,如圖2~圖5所示,圖中X1為無量綱位移,X2為無量綱速度。
由圖2~圖5可以看出,當c=0.18時,動態響應為近似橢圓形狀,隨機振動對系統動態響應的影響微乎其微;當c=0.14時,動態響應為非圓閉合曲線,無隨機振動的動態響應為一條光滑的閉合曲線,而有隨機振動的動態響應出現多條纏繞的曲線,此時可以明顯看出隨機振動對系統動態響應的影響;當c=0.07時,動態響應與c=0.14時基本保持相同,但是纏繞的曲線增多,且有隨機振動的動態響應曲線明顯增多,說明隨機振動對系統動態響應產生影響。當c=0.058 5時,動態響應的圖像為封閉曲線,變化趨于混亂,幅值明顯增大,且有隨機振動的動態響應變化幅度相對明顯。
4 結束語
▲圖2 c=0.18時系統動態響應
▲圖3 c=0.14時系統動態響應
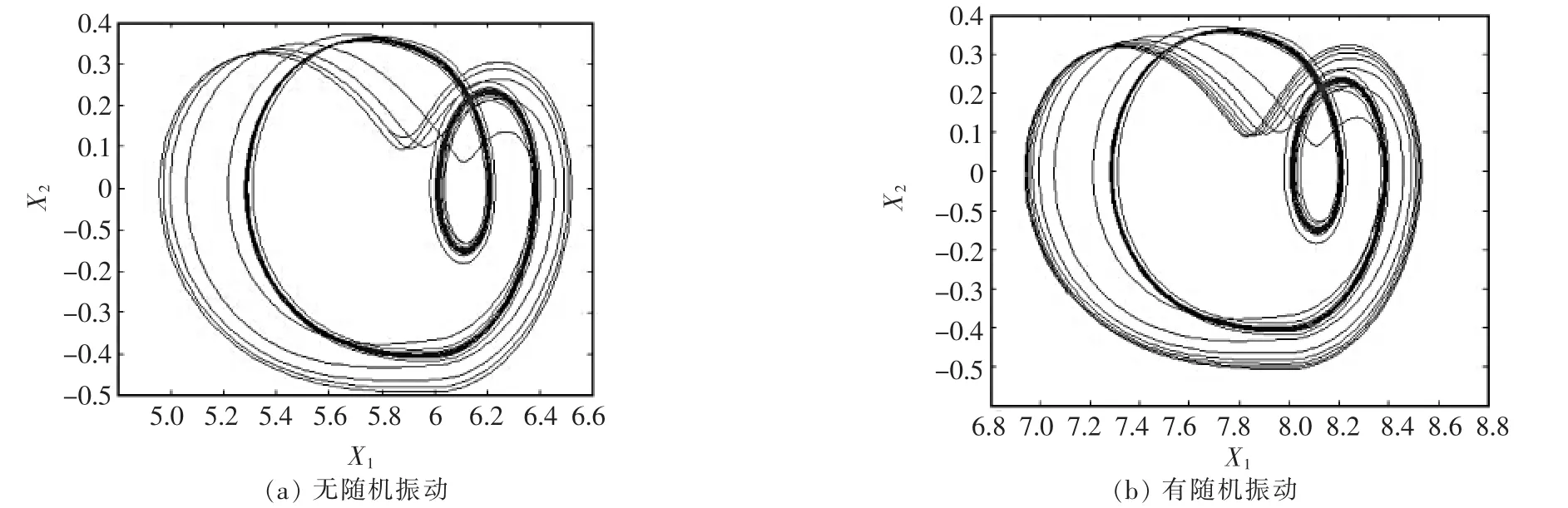
▲圖4 c=0.07時系統動態響應
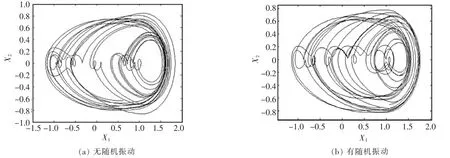
▲圖5 c=0.058 5時系統動態響應
建立雙漸開線齒輪振動模型,對其非線性動力學進行分析,在確保無關參數不影響試驗的情況下,加入隨機振動進行分析,獲得不同嚙合阻尼下的動態響應,從而反映不同隨機擾動情況下系統嚙合阻尼的變化規律[12]。分析結果表明,隨著嚙合阻尼的變小,動態響應愈發趨于不規則。有隨機振動的動態響應和無隨機振動的動態響應變化趨勢接近,有隨機振動的動態響應相對變化程度較大,說明隨機振動會對雙漸開線齒輪傳動產生不利影響。影響雙漸開線齒輪傳動的非線性因素有很多,實際使用過程中都是隨機變化的,需要特別注意。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
