基于AMESim的斷帶抓捕裝置液壓系統(tǒng)仿真研究
2018-09-18 05:30:04董凱
機械管理開發(fā) 2018年9期
關鍵詞:系統(tǒng)
董 凱
(山西晉煤集團沁水胡底煤業(yè)有限公司, 山西 晉城 048000)
引言
為了滿足日益擴大的煤炭市場需求,我國各大煤礦開始有計劃的提升采煤設備的機械化、自動化水平,大功率、長距離、大傾角、高帶速的帶式輸送機大批量的投入應用[1],輸送帶在長期工作時因輸送帶自身的質量原因、輸送帶接頭質量不合格、啟動時輸送帶內的應力變化過大、輸送機在運行的過程中載荷的突然變化等因素的影響極易發(fā)生斷帶事故,導致輸送帶及其上的輸送物將順著傾斜的支架滑落至巷道的底部,造成煤礦長期的停產及重大的經濟損失[2-3]。因此,通過對電液控制型的斷帶抓捕裝置控制原理的分析及利用AMESim仿真分析軟件對液控系統(tǒng)的建模仿真研究。
1 斷帶抓捕機構液控系統(tǒng)的工作原理
斷帶抓捕裝置的液壓控制系統(tǒng)的工作原理如圖1所示。
在帶式輸送機的輸送機構正常運轉時,斷帶抓捕裝置的信號監(jiān)控系統(tǒng)會對輸送帶的運行情況進行不間斷監(jiān)控,并運用編制好的邏輯判斷是否斷帶(斷帶抓捕裝置工作流程圖如圖2所示),若斷帶則發(fā)出斷帶信號,控制系統(tǒng)發(fā)出抓捕信號,控制電機啟動,將油箱內的液壓油通過單向閥注入到三位四通電磁換向閥中(此時三位四通電磁換向閥處于右位工作),液壓油通過右側的液控單向閥進入到執(zhí)行油缸的無桿腔,推動執(zhí)行機構推出,執(zhí)行機構在推出的過程中將有桿腔內的液壓油壓出,這部分液壓油則通過兩位四通電液換向閥進入到執(zhí)行油缸的無桿腔,同時兩位四通電液換向閥處于連通位置,使預先儲存在蓄能器中的高壓油通過系統(tǒng)的油管進入到執(zhí)行機構的無桿腔,三者共同作用,確保執(zhí)行機構能夠以最短的時間推出到位。
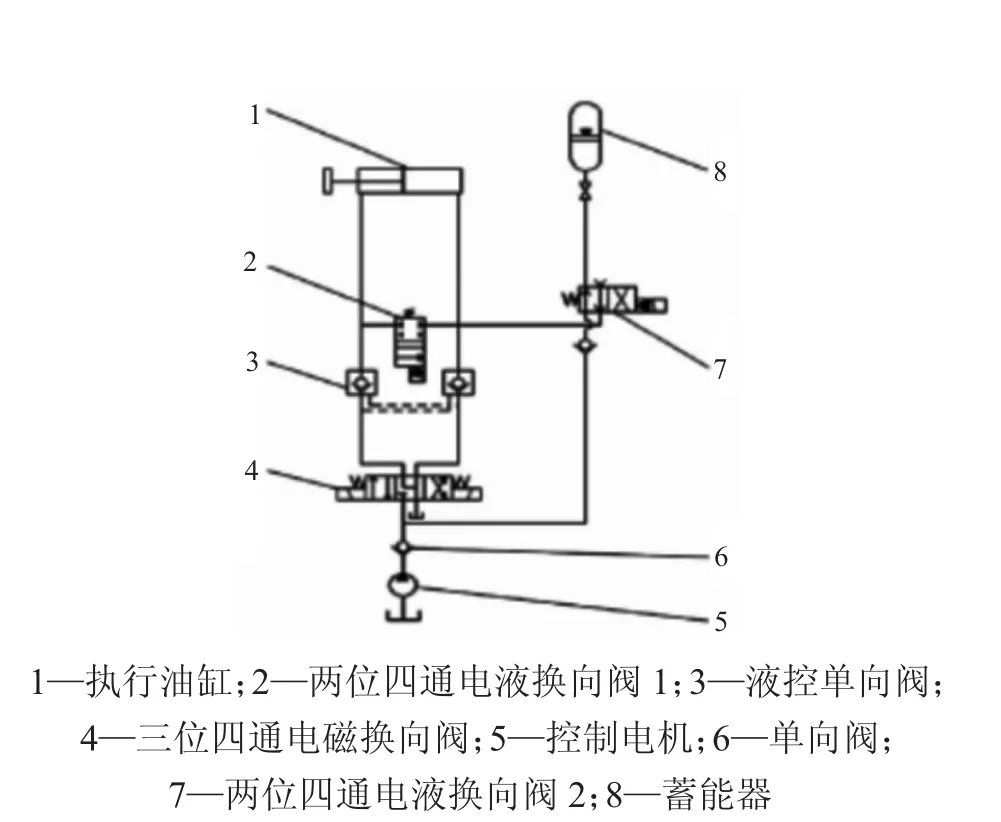
圖1 液壓系統(tǒng)控制原理圖

圖2 斷帶抓捕裝置工作流程圖
2 液壓系統(tǒng)的數(shù)學模型的建立
由液壓系統(tǒng)的工作原理圖可知,該液壓系統(tǒng)采用的是具有差動連接的差動式液壓缸,液壓缸的無桿腔的面積遠大于有桿腔的面積,由P=F/S可知,即使兩腔的壓力相同,執(zhí)行油缸的活塞桿還是會向著有桿腔的方向運動,同時從有桿腔被擠壓出來的液壓油則通過回路進入到執(zhí)行油缸的無桿腔中,極大地加快執(zhí)行油缸活塞桿的運動速度。
差動油缸在工作時活塞桿的運行速度為[4]:

式中:q為系統(tǒng)工作時的供油量;d為執(zhí)行油缸的活塞桿直徑。
執(zhí)行油缸在工作時有桿腔的回油量為:

式中:φ為執(zhí)行油缸內徑與活塞桿直徑之比;D為執(zhí)行油缸內徑。
執(zhí)行油缸工作時有桿腔的壓力為[5]:

式中:Py為系統(tǒng)的供油壓力;R1為油泵出液口到差動油缸前管路的等效液阻;R2為執(zhí)行油缸有桿腔進液管的等效液阻。
執(zhí)行油缸工作時無桿腔的壓力為:

式中:R3為無桿腔的等效液阻。
根據(jù)上面的計算公式,可得出執(zhí)行油缸在工作時的推力:

3 利用AMESim進行的仿真分析
根據(jù)斷帶抓捕機構液壓泵站的工作原理圖,利用仿真分析軟件對液壓系統(tǒng)執(zhí)行抓捕動作時的狀態(tài)進行仿真分析,該液壓泵站在工作時的額定工作壓力為8 MPa(80 bar),執(zhí)行抓捕動作時系統(tǒng)內最大的液流量為58 000 mL/min,系統(tǒng)的檢測采樣的周期為5 s,仿真分析的運行時間設置為10 s,假設系統(tǒng)在5 s時發(fā)生了斷帶事故,系統(tǒng)的仿真參數(shù)設置如表1所示:
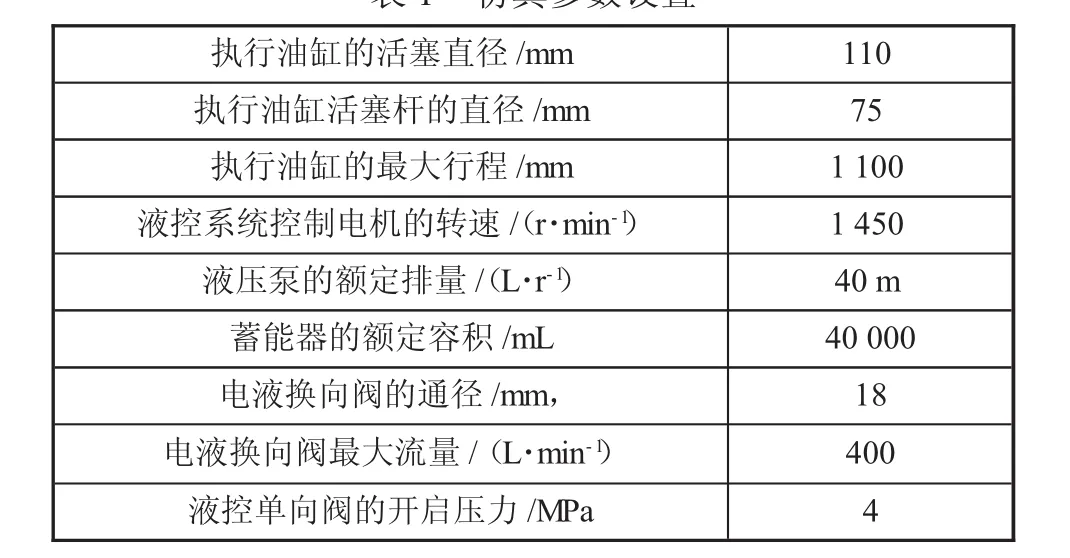
表1 仿真參數(shù)設置
利用AMESim仿真分析可知,在斷帶抓捕裝置處于保壓狀態(tài)時,執(zhí)行油缸有桿腔的壓力曲線和活塞桿的位移曲線分別如圖3、4所示:
由圖3和圖4分析可知,在0~0.6 s時斷帶抓捕裝置的液壓系統(tǒng)處于啟動的階段,執(zhí)行油缸有桿腔的壓力快速上升并在8 MPa(80 bar)時處于穩(wěn)定狀態(tài),當斷帶抓捕裝置的執(zhí)行機構在處于保壓狀態(tài)時,其離工作點的距離約0.9 m,當系統(tǒng)啟動后,執(zhí)行油缸的活塞桿收回,達到保壓位置。
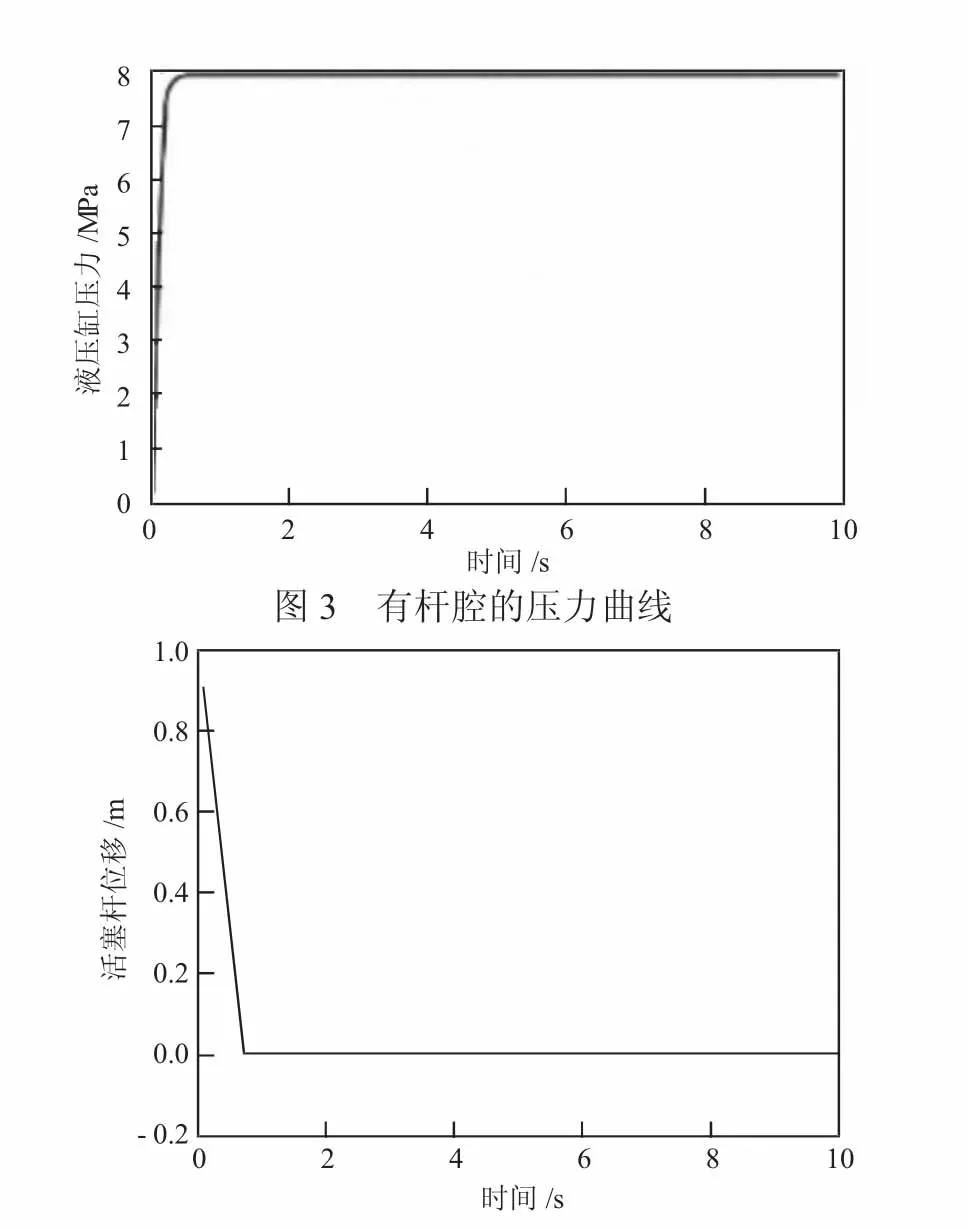
圖4 執(zhí)行油缸活塞桿的位移曲線
執(zhí)行機構在工作過程中壓力的變化情況如下圖5所呈現(xiàn)的變化曲線,工作時壓力迅速升高,最后處于穩(wěn)定狀態(tài),執(zhí)行機構在工作過程中的位移的變化曲線如圖6所示[5]。

圖5 執(zhí)行機構液控系統(tǒng)壓力變化曲線

圖6 執(zhí)行機構活塞桿的位移變化曲線
由圖5、圖6分析可知,當系統(tǒng)發(fā)出抓捕信號,系統(tǒng)開始執(zhí)行抓捕過程時,液壓系統(tǒng)的兩位四通電液換向閥1接通,執(zhí)行油缸開始差動,當系統(tǒng)開始進行抓捕時系統(tǒng)壓力迅速下降并維持在約6.6 MPa(66 bar),這是由于作為輔動力源的蓄能器釋放其中儲存的液壓油進入無桿腔,但蓄能器中仍有壓力油,因此系統(tǒng)壓力得以保持穩(wěn)定,執(zhí)行油缸整個執(zhí)行抓捕動作的實際時間約0.6 s,滿足抓捕的要求。
4 結論
帶式輸送機斷帶抓捕裝置是避免輸送機發(fā)生斷帶后輸送帶下滑的一種機械設備,采用差動設計的斷帶抓捕液壓控制系統(tǒng)能夠在斷帶發(fā)生的0.6 s內控制抓捕機構完成對輸送帶的抓捕,確保對輸送帶的緊急制動,可靠性高、靈敏性好。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32