現代有軌電車智能交通系統優先控制策略方案研究
2018-09-11 07:01:38
電氣化鐵道 2018年4期
0 引言
目前,有軌電車作為城市公共交通的重要組成部分,結合我國現有公路交通的通行方式,綜合考慮現代有軌電車、汽車、行人等交通要素,研究一種相對科學合理的通行相序方案,合理制訂有軌電車優先通過平交路口的控制策略方案極為重要。
1 現狀
1.1 國內外應用情況
有軌電車通行方式一般包含同等條件下于路口處的通行準許和通行順序。通行順序方面,目前在國內一般不采用優先控制模式,即有軌電車不設置專用信號燈或依賴于路口公路信號燈,在通行順序上有軌電車與道路汽車無異;另一種是采用有軌電車優先模式。歐洲學者考慮到有軌電車作為大容量的公共交通設施,提高有軌電車的運行效率在一定程度上可以帶動交通系統整體效率,因而在歐洲一些道路運行中滲透了有軌電車通行優先的思路,但具體的實現方式各異,效果也不盡相同。
1.2 國內外優先控制主要模式
智能交通優先控制策略分2種:無條件絕對優先和有條件相對優先。無條件絕對優先,其目的是實現有軌電車完全不停車通過路口;有條件相對優先,其目的是盡可能使有軌電車不停車通過路口,當停車時,盡可能減少停車時間。
2 優先控制策略分析
2.1 優先控制思路
2.1.1 無條件優先控制策略
假設在A點檢測到有軌電車到達,到達停止線的行程時間為T,信號機判斷T時間后的相位運行狀態:
(1)若判斷有軌電車到達路口時有軌電車相位為綠燈,不需要調整信號方案,有軌電車可不停車通過停止線;
(2)若預測有軌電車到達路口時有軌電車相位為紅燈,則進一步判斷電車到達時刻正在執行的相位是否已超過最小綠燈時間:若已超過最小綠燈時間,紅燈相位執行完最小綠燈時間后切換到有軌電車所在相位;若未超過最小綠燈時間,則在前一相位結束時刻切換到有軌電車所在相位。
二級優化:A檢測器檢測到電車信號,并按照上述思路執行無條件優先控制,可確保電車到達停止線時相位狀態基本處于優先相位。為了進一步減少隨機性因素對優先控制效果產生的影響,利用B檢測器檢測信號對優先方案進行二級優化。當B檢測器檢測到信號時,根據電車從B檢測器到停止線的行程時間判斷電車相位執行狀態,若存在相位尚未到達或時間不足情況,需對控制方案進行二次調整,確保電車通過,消除隨機性因素的影響。
根據C/D檢測器檢測到路口是否占用,進行最大路口占用時間控制,在占用時間內保持公交相位為綠燈,當檢測到路口出清或超過最大占用時間閾值時,清除信號優先控制。
無條件優先的相位為與電車相位同放的社會車輛相位,電車相位跟隨執行,社會車輛可通行。
圖1為無條件優先控制策略示意圖,該處以社會車輛相位為示例,在實施時,需單獨配置電車相位,并跟隨社會車輛相位執行。
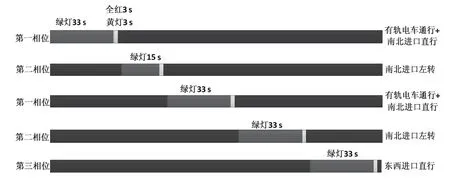
圖1 無條件優先控制策略
2.1.2 有條件優先控制策略
有條件控制方式包括綠燈延長、紅燈早斷和相位插入3種方式。3種不同的優先控制方式根據車輛到達路口的時刻和當前信號控制方案執行情況進行選擇觸發,下文對每種策略下有軌電車駛過交叉路口后的相位變化進行闡述。
假設某一路口未采用任何優先策略,其信號控制方案如圖2所示。
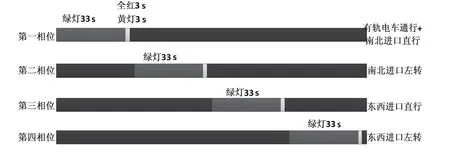
圖2 未采用任何優先策略
(1)綠燈延長。
當觸發時刻電車相位為綠燈,且剩余綠燈時間不足以保證電車通過,則執行綠燈延長。假設綠燈延長時間為9 s,根據一定的算法得出每個非優先相位放行綠燈時間為30 s,交通信號控制方案如圖3所示。
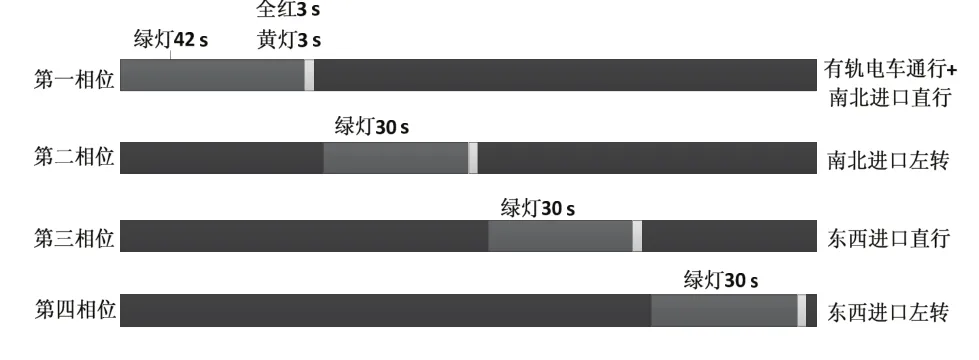
圖3 綠燈延長控制策略
(2)紅燈早斷。
若電車相位為當前相位的后一相位(相位緊鄰),則采用紅燈早斷控制。判斷當前相位是否執行完畢最小綠燈時間,若執行完畢,則結束當前相位并切換到電車相位,交通信號控制方案如圖4所示。
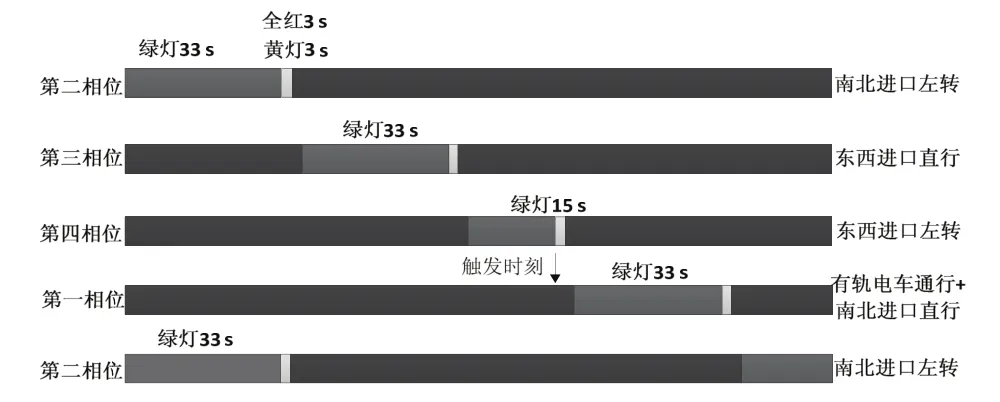
圖4 紅燈早斷控制策略
(3)相位插入。
若電車相位為非當前相位的后一相位(中間間隔1-N個相位),則采用相位插入控制。判斷優先時刻當前相位是否執行完畢最小綠燈時間,若執行完畢,則中斷當前相位,插入電車專用相位;若未執行完畢最小綠燈時間,則待執行完畢后插入。假設專用相位為10 s,交通信號控制方案如圖5所示。
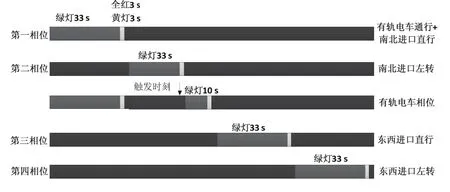
圖5 相位插入控制策略
有條件優先中插入的相位為有軌電車專用相位,時長僅為電車通過路口的時間,在此期間社會車輛無通行權。
2.2 檢測器位置布置原則
對于每個道口,均設有A、B、C、D 4個檢測信標,分別對應預告、到達、進口、出口等狀態。
2.2.1 A點布置原則
A點位置檢測有軌電車到達信號并主要用于無條件優先控制,因此A點檢測器位置與路口間距離較大,以保障擁有足夠的時間進行相位切換,保障路口行人通行安全。
其基本位置位于距離路口400 m處,依據為:有軌電車從A點行駛到停止線的時間需大于路口交叉方向的最小綠燈時間,按照電車以平均速度14 m/s(50 km/h)行駛,路口交叉相位最長的最小綠燈時間為30 s(一般大路口使用30 s均可滿足行人過街需求,而實際值則比30 s小很多,此處需要按照最長時間計算)。在岔區和路口重疊區,有軌電車路口信號燈的位置可能會做出調整,A點的布置也將進行相應調整。
(1)上游出口處無停靠站。
若路段長度大于440 m,A點檢測器設置位置為距離路口400 m處;若路段長度小于440 m,A點檢測器可設置在上游路口出口處(圖6)。
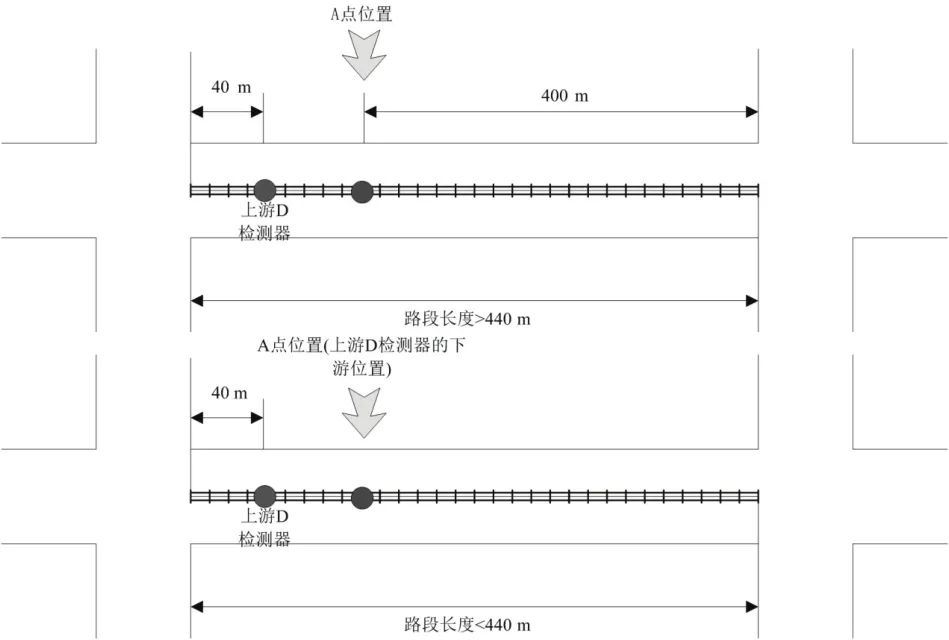
圖6 A點位置
(2)上游出口處設有停靠站。
若站臺出口到路口距離大于450 m,A點檢測器設置位置為距離路口400 m處(圖7)。
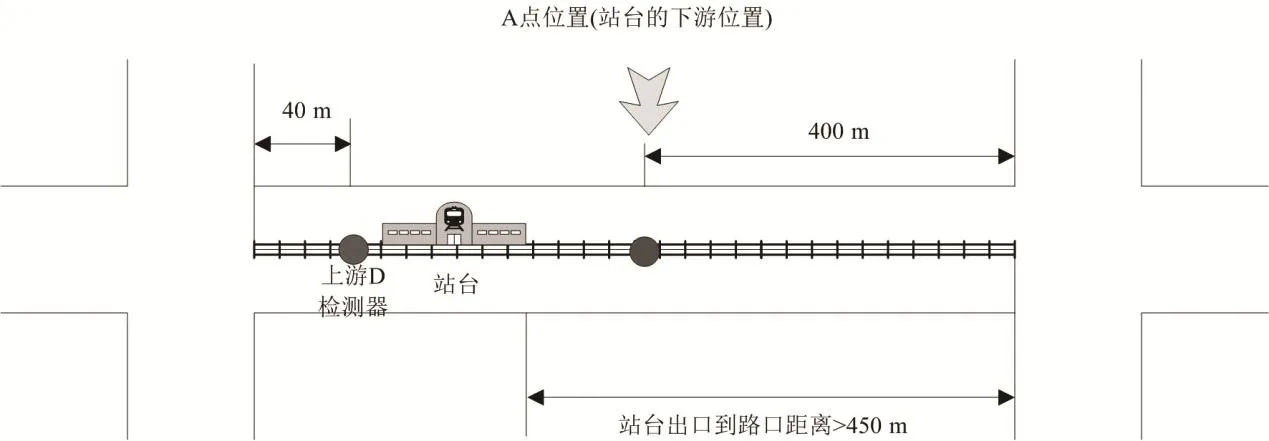
圖7 A點位置
若站臺出口到路口距離小于450 m,大于(120+50)m,A點檢測器位置為距離站臺出口下游約50 m處。預留50 m的目的在于消除車輛停靠站時定位數據存在靜態漂移現象的影響,避免定位誤差導致的優先控制誤觸發(圖8)。
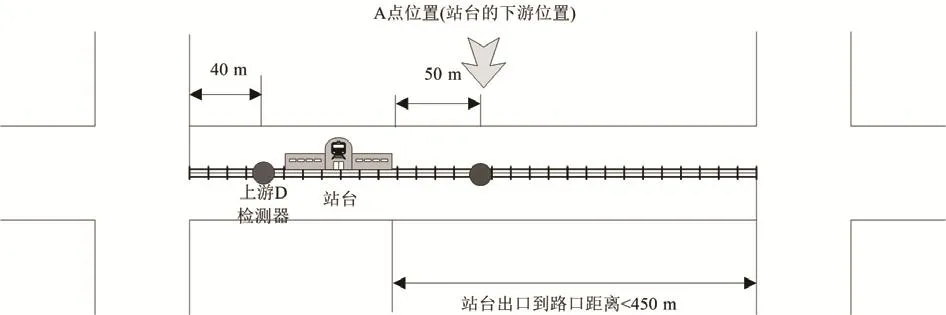
圖8 A點位置
若站臺出口距離較小,且下游路口在切換相位時所需時間大于電車行駛到停止線的行程時間時,按照“站臺出口到路口距離小于(120+50)m”布設A檢測器,即若站臺出口到路口距離小于(120+50)m,A點檢測器位置為停靠站上游位置,由于停靠站時間存在隨機性,A點布置以時間為依據:A檢測器檢測到車輛時,其行駛到停止線的時間(包含停站時間)大于相位調整時間(30 s)。
(3)下游路口進口處設有停靠站。
若下游路口進口處設有停靠站,則按照上述“站臺出口到路口距離小于(120+50)m”情況設置A點檢測器。
上述為A點檢測器布置需遵循的基本原則,均基于30 s相位調整時間,由于不同路口的物理結構不同,執行優先控制時相位調整時間也不盡相同,因此應根據路口實際情況對A點位置進行單獨配置。
2.2.2 B點布置原則
B點檢測器主要功能:對于無條件優先路口,在A檢測器觸發無條件優先控制后,根據電車到達路口情況執行二級優化控制,確保電車不停車;對于有條件優先路口,檢測車輛到達路口情況,并執行有條件優先控制。B點的布置原則主要針對有條件優先中的相位插入,需滿足相位插入時擁有充足的時間進行相位過渡,同時也能滿足綠燈延長和紅燈早斷算法的感應需求。
B點檢測器基本位置位于距離路口100~120 m處,依據為:當執行相位插入時,插入有軌電車專用相位,需保證正在執行的其他相位擁有足夠的時間進行過渡,過渡時間一般為3 s綠閃+3 s黃燈+3 s全紅 =9 s(此為最大值,實際可能沒有全紅,實際時間比該時間小),按照路口通行最高限速11 m/s(40 km/h)計算,B點位置需布設在距離停止線100~120 m處。在岔區和路口重疊區,有軌電車路口信號燈的位置可能會做出調整,B點的布置也將進行相應調整。
(1)入口處無停靠站,B檢測器布置在距離停止線100~120 m處(圖9)。
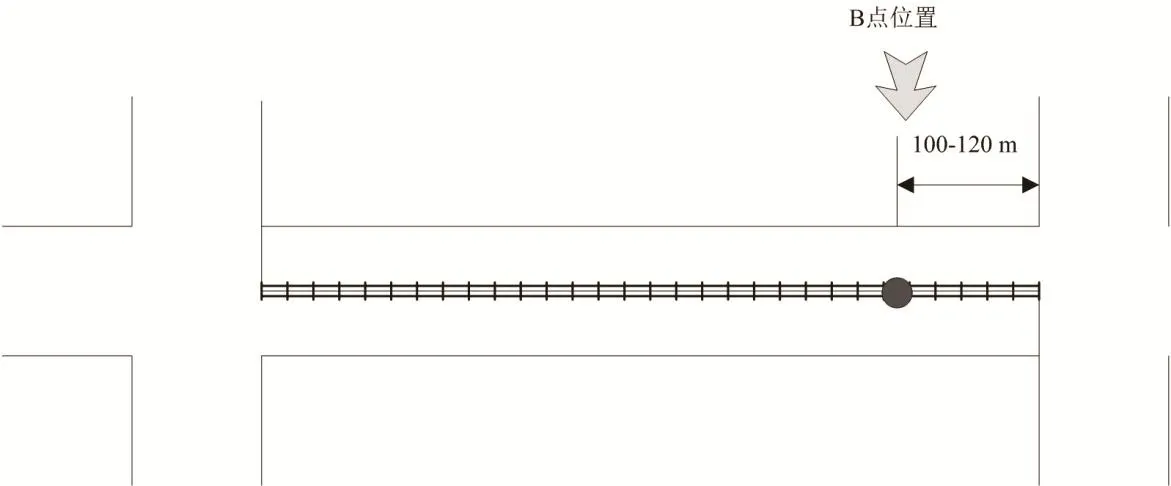
圖9 B點位置
(2)入口處設有停靠站且停靠站出口與停止線距離大于120 m,B檢測器設置在距離停止線100~120 m處(圖10)。
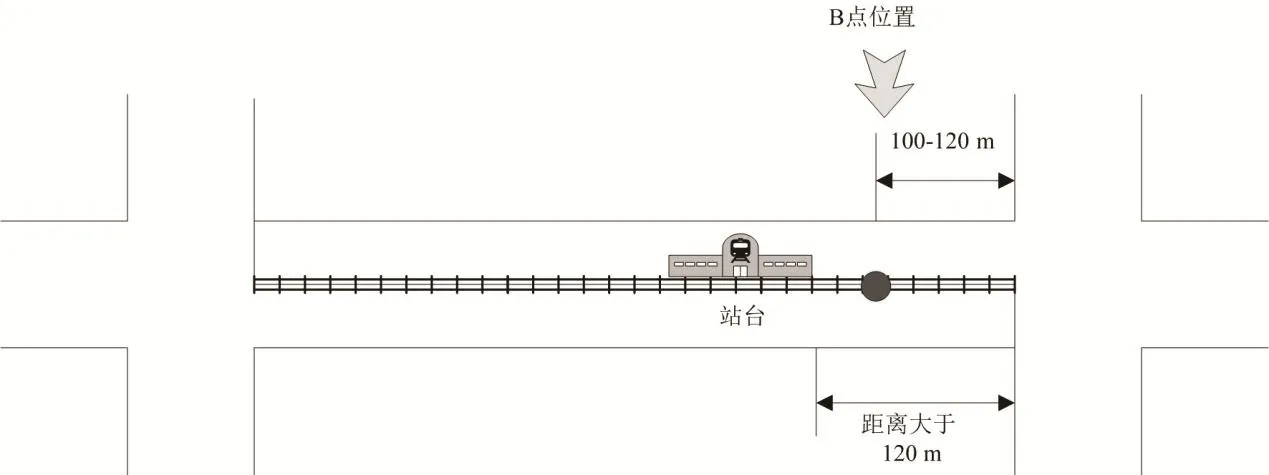
圖10 B點位置
(3)入口處設有停靠站且停靠站出口與停止線距離小于120 m,采用RTS技術,即司機在發車時按下RTS按鈕,觸發優先請求(圖11)。
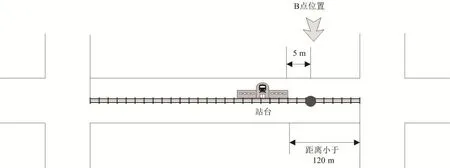
圖11 B點位置
2.2.3 C點布置原則
C點檢測器主要功能是判斷路口是否處于占用狀態,并執行有軌電車相位駐留控制。C點主要根據現場情況制訂布置方案。
C檢測器布置在距離停止線1 m處(圖12)。
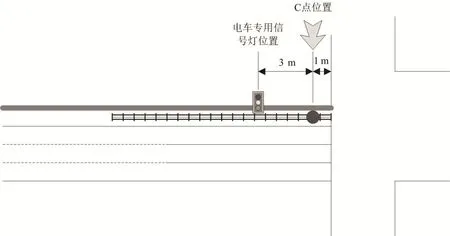
圖12 C點位置
2.2.4 D點布置原則
D點檢測器主要作用是判斷路口出清,并解除相關的優先控制。D點的布置原則為,以確保行車安全為前提,當車身完全駛出路口時觸發路口出清信號。
D點檢測到有軌電車時,確保電車已經離開交叉口,因此D點檢測器布設位置為出口下游40 m處(一個車身長度)(圖13)。
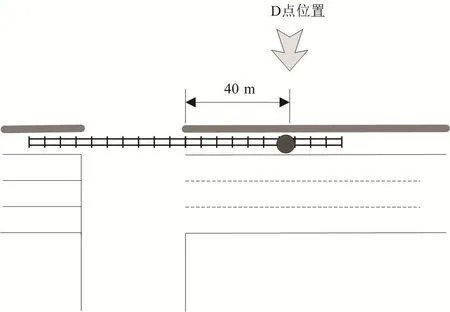
圖13 D點位置
2.3 檢測器異常處理策略
2.3.1 A、B檢測器異常處理策略
對配置為無條件優先的路口,A檢測器為主要觸發控制檢測器,B為調整檢測器,2個檢測器均檢測到信號時,執行完整的二級優化控制策略。若A檢測器檢測到車輛,則根據A執行無條件優先控制;若A未檢測到車輛而B檢測到,則根據B執行(如果有條件優先控制可以保證不停車,或者讓電車等待時間更少,該處也可根據優先效果降級為有條件優先控制,需視實際情況確定)。
對配置為有條件優先的路口,若A未檢測到車輛而B檢測到,優先控制不受影響;若B檢測器未檢測到車輛到達,則不執行有條件優先控制,僅執行常規信控。
2.3.2 C、D檢測器異常處理策略
C/D點配合完成優先控制消除,若C/D無法檢測到信號,則有軌電車相位跟隨機動車相位正常執行;若檢測到車輛一直占用路口,占用狀態不消除,則在控制算法中設置時間閾值,觸發優先控制后,超過時間閾值將自動解除優先控制。
3 執行優先控制的條件
(1)執行絕對優先的條件:路口交通飽和度小于特定閾值;A、B檢測器至少其中之一無故障;路口信號機未執行優先級更高的控制,如勤務、手動控制等;信號機無嚴重故障,未觸發降級控制。
(2)執行相對優先的條件:路口交通狀況不滿足絕對優先的飽和度閾值,無法采用絕對優先時,可采用相對優先;相位早斷需滿足路口飽和度閾值;A、B檢測器至少其中之一無故障;路口信號機未執行優先級更高的控制,如勤務、手動控制等;信號機無嚴重故障,未觸發降級控制。
(3)執行相對優先控制時,以下情況可能導致路口停車:壓縮方向的飽和度均高于調整閾值,導致相位壓縮時間不足,算法執行失敗;按最大程度進行相位調整后,電車到達停止線時仍然未過調整相位的最小綠燈時間,為保證行人安全,必須等待最小綠燈時間完畢之后再進行相位切換;突發事件等隨機因素影響,如觸發綠燈延長控制后,有軌電車中途由于突發事件停車延誤,錯過延長時間。
4 結語
根據上述方案的討論可知,無條件優先控制主要采用插入有軌電車方向相位的方式實現,其目標是實現電車完全不停車通過路口。考慮交叉路口行人過街等安全因素,執行無條件優先控制時需要充足的相位調整時間, 因此采用A檢測器進行控制策略觸發。同時,考慮到電車行駛過程中存在隨機性因素(如駕駛行為差異性等),在利用A檢測器進行優先控制的基礎上,采用B檢測器對控制策略進行二級調整,由于B檢測器距離路口較近,識別進入路口狀態比較準確,可以確保無條件優先控制效果。
有條件優先控制主要采用綠燈延長、紅燈早斷和插入電車專用相位的方式實現。其目標在于盡可能使電車不停車通過路口,當出現停車時,盡可能縮短停車時間。由于有條件優先控制為精細化的信號控制,如綠燈延長時,可能只延長幾秒鐘,需要對電車到達路口的狀態進行準確檢測,因此主要采用B檢測器來實現有條件優先控制。
參考文獻:
[1]吳勝權.城市現代有軌電車工程基礎[M].北京:機械工業出版社,2016.
[2]喻智宏,孫吉良,申大川.有軌電車通信信號技術與智能交通系統[J].城市交通,2013(4):44-51.
[3]葉輝.現代有軌電車信號系統平交路口信號燈控制策略研究[J].商品與質量,2016(26).
[4]吳勝權,黃振輝,曹源.有軌電車路權配置與信號系統選擇[J].中國鐵路,2014(8):97-99.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
海峽科技與產業(2016年3期)2016-05-17 04:32:12
通信電源技術(2016年1期)2016-04-16 04:57:26
