無(wú)感無(wú)刷直流電動(dòng)機(jī)技術(shù)在密度儀器上的應(yīng)用
2018-09-11 06:15:22李岑
石油管材與儀器 2018年4期
李 岑
(中國(guó)石油集團(tuán)測(cè)井有限公司大慶分公司 黑龍江 大慶 163412)
0 引 言
早期的密度儀器使用單相交流電動(dòng)機(jī)[1]開關(guān)腿,要使電動(dòng)機(jī)能自動(dòng)旋轉(zhuǎn)起來,需要在運(yùn)行繞組與起動(dòng)繞組之間串聯(lián)一個(gè)合適的電容,使她們的電流在相位上近似相差90°,這樣兩個(gè)在時(shí)間上相差90°的電流通入兩個(gè)在空間上相差90°的繞組,將會(huì)在空間上產(chǎn)生(兩相)旋轉(zhuǎn)磁場(chǎng),在這個(gè)旋轉(zhuǎn)磁場(chǎng)作用下,轉(zhuǎn)子就能自動(dòng)起動(dòng)。單相交流電動(dòng)機(jī)雖然結(jié)構(gòu)簡(jiǎn)單,運(yùn)行可靠,但在用電容起動(dòng)電動(dòng)機(jī)時(shí),電容的大小影響到電動(dòng)機(jī)起動(dòng)時(shí)的轉(zhuǎn)距,電容太大時(shí)轉(zhuǎn)距過大造成起動(dòng)時(shí)間過長(zhǎng),容易造成起動(dòng)線圈發(fā)生故障,電容太小時(shí)轉(zhuǎn)距太小造成起動(dòng)不完全,有可能因起動(dòng)不起來造成運(yùn)行線圈燒掉,除此之外,用外接起動(dòng)電容的方法起動(dòng)單相交流電動(dòng)機(jī),沖擊電流是額定電流的5~7倍,不但可能燒毀電容,而且可能超過電動(dòng)機(jī)的契約容量而損壞電動(dòng)機(jī)。為了避免這些隱患,無(wú)感無(wú)刷直流電動(dòng)機(jī)開始應(yīng)用在密度儀器上。
1 無(wú)感無(wú)刷直流電動(dòng)機(jī)技術(shù)
1.1 直流無(wú)刷電動(dòng)機(jī)工作原理
直流無(wú)刷電動(dòng)機(jī)[2]的主要組成部分有電動(dòng)機(jī)本體、位置傳感器與電子開關(guān)等3部分,如圖1所示。定子繞組一般制成多相(三、四、五相不等),轉(zhuǎn)子由永久磁鐵按一定的極對(duì)數(shù)(2 p=2,4,…)組成,電子開關(guān)一般是由功率電子器件和它的控制電路以及轉(zhuǎn)子位置傳感器等所組成。圖1所示的電動(dòng)機(jī)本體為2極三相,定子A、B、C相繞組分別與電力開關(guān)元件V1,V2,V3相接。位置傳感器的跟蹤轉(zhuǎn)子與電動(dòng)機(jī)轉(zhuǎn)軸相連接。
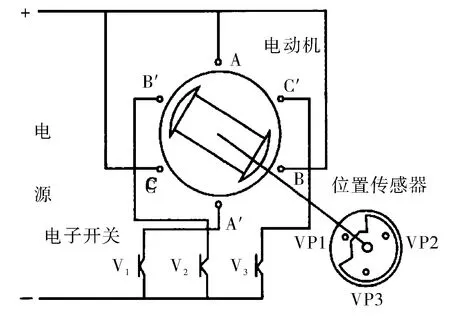
圖1 直流無(wú)刷電動(dòng)機(jī)的組成原理圖
定子繞組的某一相通電時(shí),該電流與轉(zhuǎn)子永久磁鐵的磁極產(chǎn)生的磁場(chǎng)相互作用,從而產(chǎn)生轉(zhuǎn)距,驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn);再由位置傳感器將轉(zhuǎn)子磁極位置信號(hào)變換成電信號(hào),去控制電子開關(guān)線路,從而使定子各相繞組按一定順序?qū)ǎㄗ酉嚯娏麟S轉(zhuǎn)子位置的變化而按一定的順序換相。由于電子開關(guān)線路的導(dǎo)通次序是與轉(zhuǎn)子轉(zhuǎn)角同步的,因而起到了機(jī)械換向器的換向作用。直流無(wú)刷電動(dòng)機(jī)的原理框圖如圖2所示。
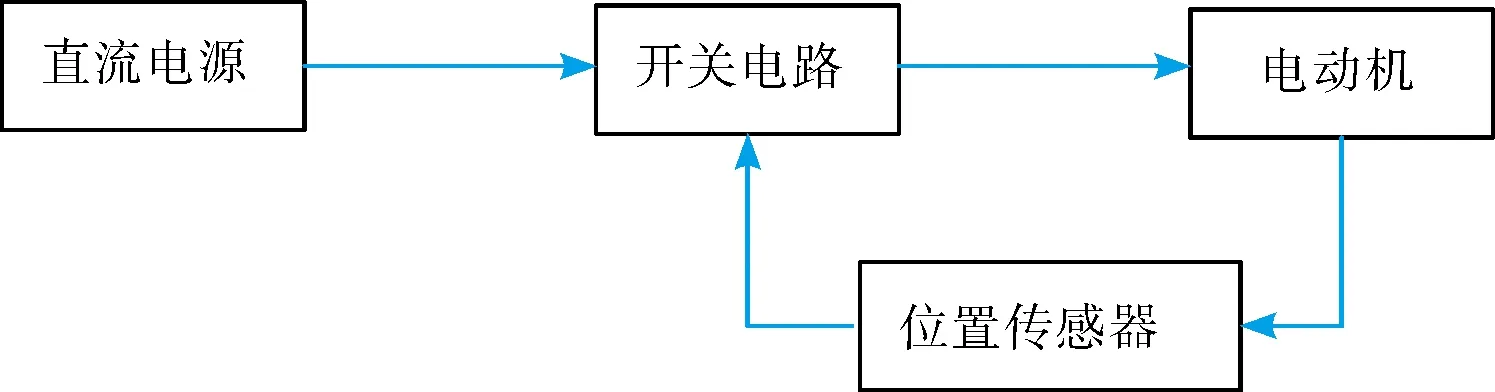
圖2 直流無(wú)刷電動(dòng)機(jī)的原理框圖
1.2 無(wú)傳感器控制技術(shù)
高性能直流無(wú)刷電動(dòng)機(jī)運(yùn)行控制系統(tǒng)需要精確檢測(cè)磁位置以實(shí)現(xiàn)磁場(chǎng)定向控制,一般采用光電編碼器或旋轉(zhuǎn)變壓器等機(jī)械傳感器。然而傳感器體積大,安裝不方便,并且生產(chǎn)成本高。基于這些不利因素,這就要求研究無(wú)傳感器的控制方法[3]。通常是利用直流無(wú)刷電動(dòng)機(jī)本體在運(yùn)行時(shí),各相定子繞組自身自然存在的反電動(dòng)勢(shì)作為轉(zhuǎn)子磁極位置的反饋信號(hào)來代替原有位置傳感器的作用,參與直流無(wú)刷電動(dòng)機(jī)的閉環(huán)控制運(yùn)行。直流無(wú)刷電動(dòng)機(jī)起動(dòng)后,其轉(zhuǎn)子永久磁鐵所產(chǎn)生的磁通要切割定子繞組而產(chǎn)生反電動(dòng)勢(shì)E(E=BLwrr,由于wr≠0,故只有磁場(chǎng)B為零時(shí),E才為零),其大小正比于直流無(wú)刷電動(dòng)機(jī)的轉(zhuǎn)速及其氣隙中的磁感應(yīng)強(qiáng)度B。當(dāng)轉(zhuǎn)子磁鐵的極性改變時(shí),反電動(dòng)勢(shì)的波形的正負(fù)也隨著改變。所以,只要測(cè)出反電動(dòng)勢(shì)波形的過零點(diǎn),就可以確定轉(zhuǎn)子磁鐵精確位置,并以此來控制直流無(wú)刷電動(dòng)機(jī)的換相。
2 無(wú)感無(wú)刷直流電動(dòng)機(jī)技術(shù)在密度儀器上的應(yīng)用
2.1 電動(dòng)機(jī)控制電路的設(shè)計(jì)
直流無(wú)刷電動(dòng)機(jī)起動(dòng)、運(yùn)轉(zhuǎn)、停止都較單相交流電動(dòng)機(jī)復(fù)雜,需要專門設(shè)計(jì)電路板[4],來控制電動(dòng)機(jī),如圖3和圖4所示。
為了起動(dòng)電動(dòng)機(jī),測(cè)井操作員發(fā)送電動(dòng)機(jī)命令,通過電纜送入數(shù)傳儀器,然后再將命令送入密度儀器的通訊板。通訊板接下來發(fā)布一系列命令。通訊板第一個(gè)命令是讓地面直流電源接入電動(dòng)機(jī)控制板;第二個(gè)命令是電動(dòng)機(jī)轉(zhuǎn)向命令,控制開腿或者關(guān)腿;第三個(gè)命令是電動(dòng)機(jī)使能信號(hào),起動(dòng)電動(dòng)機(jī)控制板上的U1內(nèi)的序列發(fā)生器。
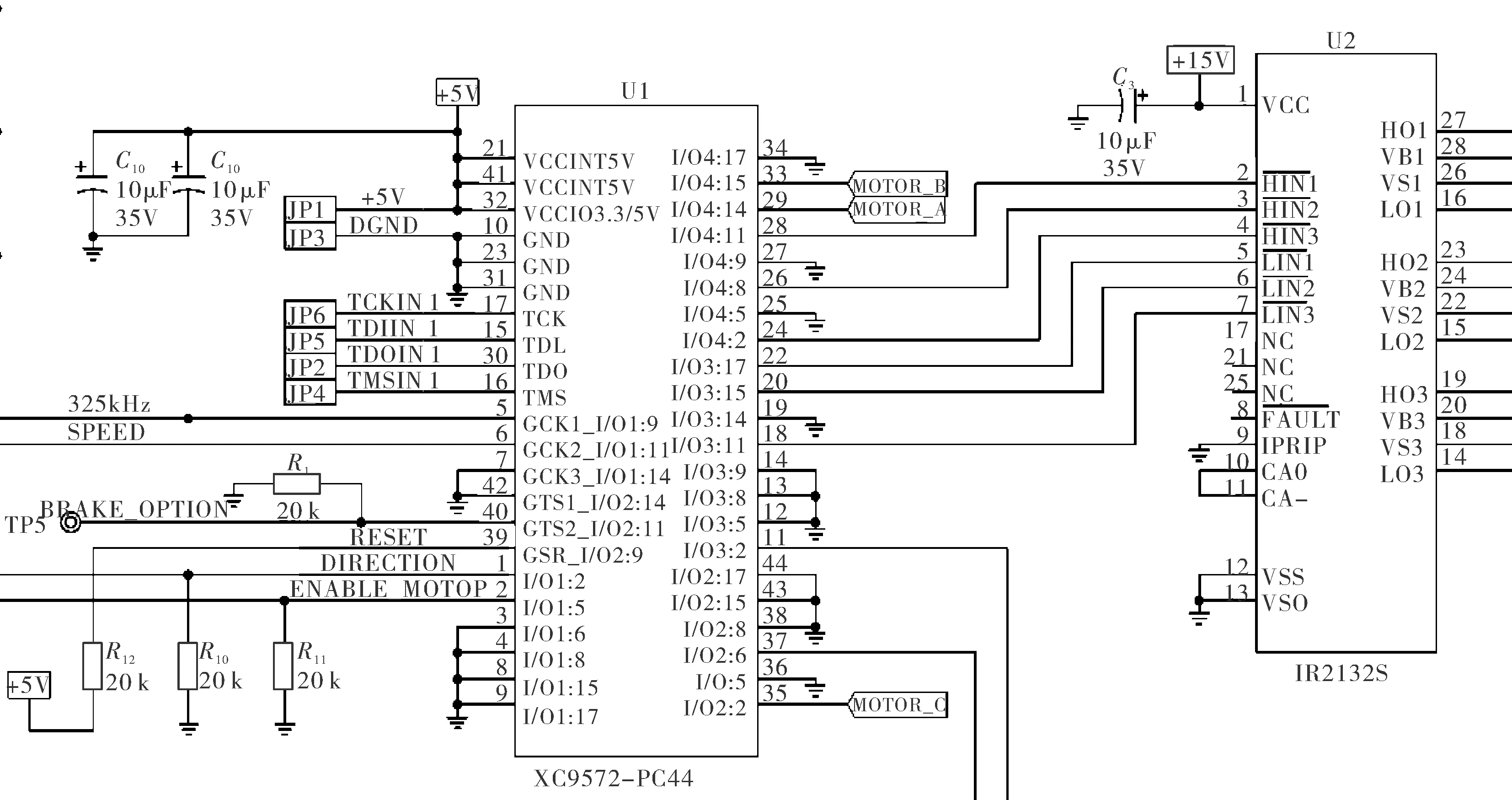
圖3 電動(dòng)機(jī)控制電路A部分
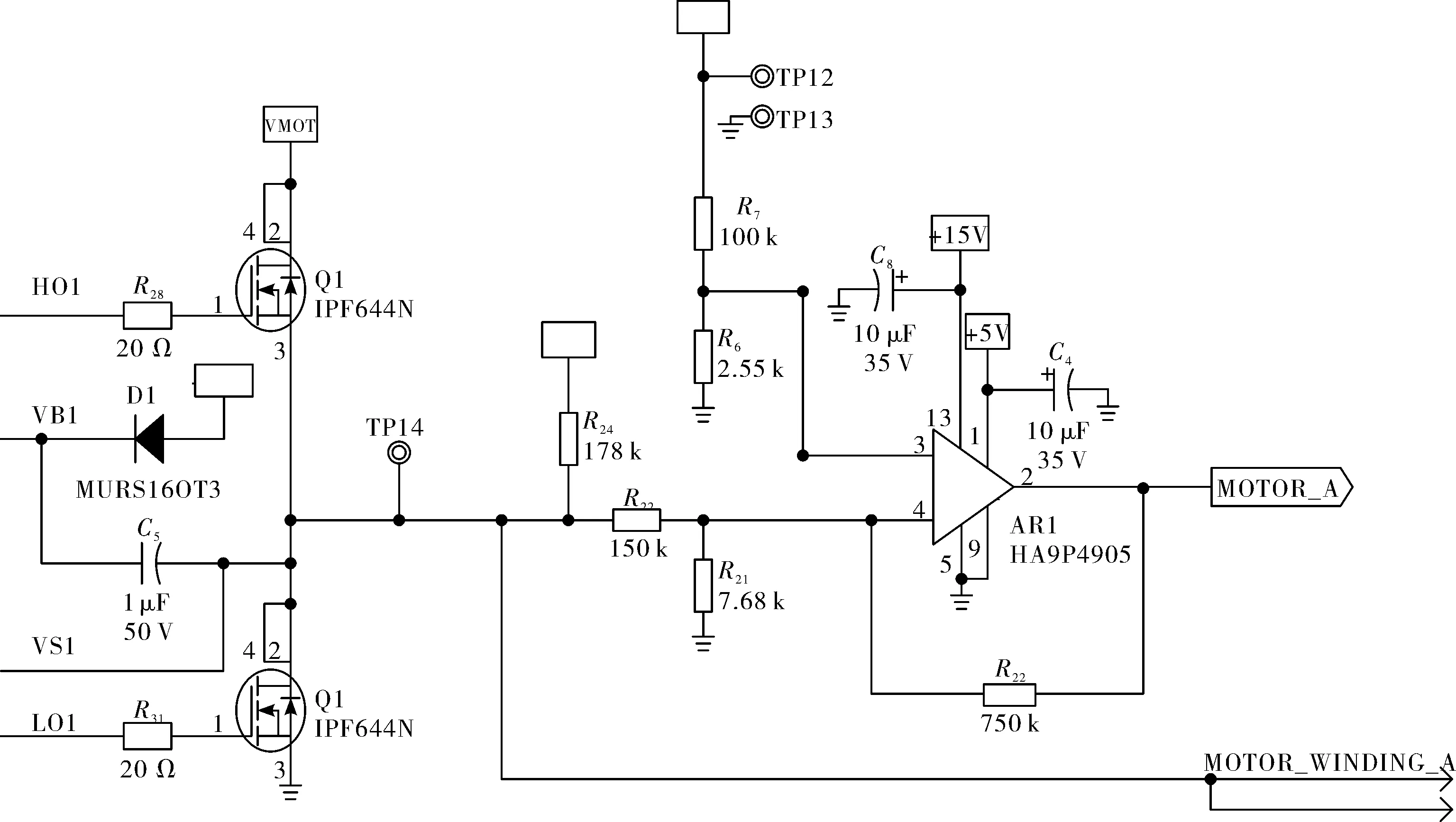
圖4 電動(dòng)機(jī)控制電路B部分
U1是CPLD可編程邏輯器件,保持時(shí)序邏輯讓電動(dòng)機(jī)旋轉(zhuǎn)。U2是電平轉(zhuǎn)換器,轉(zhuǎn)換U1輸出邏輯電平到合適的電平,以驅(qū)動(dòng)場(chǎng)效應(yīng)開關(guān)管Q1、Q2、Q3、Q4、Q5、Q6。AR1是四重比較器,四重比較器中的有三個(gè)部分用來感應(yīng)無(wú)勵(lì)磁電動(dòng)機(jī)繞組的電壓。通過拿無(wú)勵(lì)磁電動(dòng)機(jī)繞組上的電壓與參考電壓進(jìn)行比較,當(dāng)電動(dòng)機(jī)有某個(gè)確定的旋轉(zhuǎn)位置時(shí),比較器輸出狀態(tài)發(fā)生改變,以維持電動(dòng)機(jī)旋轉(zhuǎn)。
值得注意的是,在設(shè)計(jì)中使用了軟件起動(dòng)法[5]。在電動(dòng)機(jī)靜止和低速運(yùn)動(dòng)時(shí),其反電動(dòng)勢(shì)為零或極低,無(wú)法檢測(cè),因此采用外同步起動(dòng)的方法。在電動(dòng)機(jī)起動(dòng)時(shí),先在某相加電壓,然后檢測(cè)過零點(diǎn);若檢測(cè)到過零點(diǎn),就提前切換;如果檢測(cè)不到就延時(shí)一段時(shí)間再切換。以此來使電動(dòng)機(jī)轉(zhuǎn)速逐漸升高,當(dāng)反電動(dòng)勢(shì)足夠大時(shí),則進(jìn)入正常運(yùn)轉(zhuǎn)方式。
2.2 應(yīng)用效果分析
當(dāng)未接入電動(dòng)機(jī),電動(dòng)機(jī)控制板輸出空載的前提下,測(cè)量三相輸出MOTOR WINDING_A、MOTOR WINDING_B、MOTOR WINDING_C,波形如圖5所示。
當(dāng)接入電動(dòng)機(jī)后,電動(dòng)機(jī)控制板輸出帶負(fù)載的前提下,測(cè)量三相輸出MOTOR WINDING_A、MOTOR WINDING_B、MOTOR WINDING_C,波形如圖6所示。
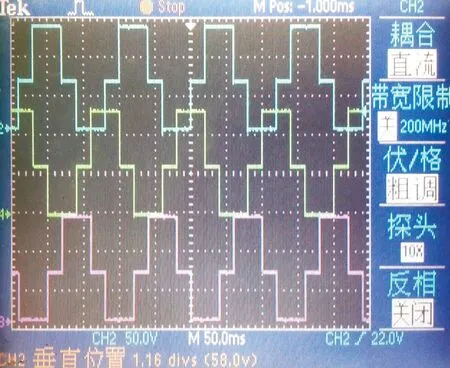
圖5 未接電動(dòng)機(jī)三相測(cè)量波形
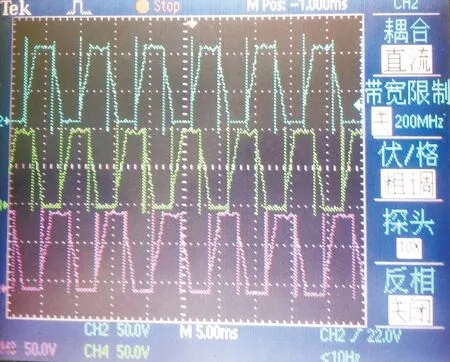
圖6 接電動(dòng)機(jī)三相測(cè)量波形
對(duì)照?qǐng)D5圖6,接電動(dòng)機(jī)與未接電動(dòng)機(jī)時(shí),三相輸出波形存在明顯的區(qū)別:未接電動(dòng)機(jī)時(shí),三相輸出方波,測(cè)量的是輸入電勢(shì),而在接電動(dòng)機(jī)時(shí),三相輸出梯形波,測(cè)量的是感生電動(dòng)勢(shì)。原因在于,無(wú)感無(wú)刷直流電動(dòng)機(jī)利用第三相的感生電動(dòng)勢(shì)去測(cè)量轉(zhuǎn)子的位置。在任意兩相通電期間,如果我們?nèi)y(cè)量第三相上的電壓,會(huì)發(fā)現(xiàn)其間有一個(gè)從正到負(fù)(或者從負(fù)到正)的變化過程。其等效電路圖如圖7所示。
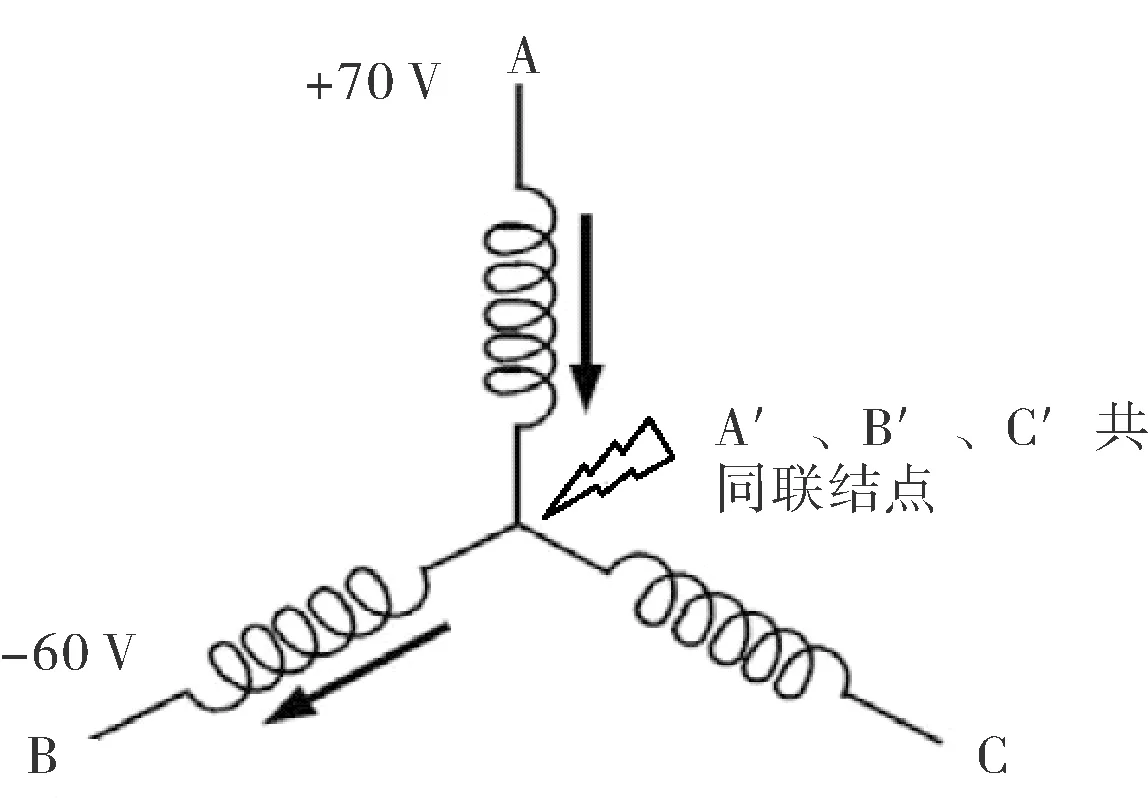
圖7 電動(dòng)機(jī)等效電路圖
這里需要說明一下的是,在AB相通電期間,不只是線圈CC′上產(chǎn)生感生電動(dòng)勢(shì),其實(shí)AA′和BB′也在切割磁力線,也都會(huì)產(chǎn)生感生電動(dòng)勢(shì),其電動(dòng)勢(shì)方向與外加的130 V電源相反,所以叫“反向感生電動(dòng)勢(shì)”(BEMF);不同的是在AB相通電期間,CC′的感生電動(dòng)勢(shì)會(huì)整個(gè)換一個(gè)方向,也即所謂的“過零點(diǎn)”。
也就是說,在AB相通電期間,只要一直監(jiān)測(cè)電動(dòng)機(jī)的C引線的電壓,一旦發(fā)現(xiàn)它低于共同聯(lián)結(jié)點(diǎn)的電壓,就說明轉(zhuǎn)子已轉(zhuǎn)過30°到達(dá)了中間的位置,只要再等30°就可以換相了。同理,當(dāng)電動(dòng)機(jī)處于AC相通電時(shí),監(jiān)測(cè)的是B相輸出電壓;當(dāng)電動(dòng)機(jī)處于BC相通電時(shí),監(jiān)測(cè)的是A相輸出電壓。接下來的CA,CB相通電情況也類似,不再贅述。 無(wú)論從波形圖來看,還是實(shí)踐證明,無(wú)感無(wú)刷直流電動(dòng)機(jī)在密度儀器上運(yùn)行平穩(wěn)可靠。
3 結(jié) 論
從實(shí)踐來看,密度儀器使用無(wú)感無(wú)刷直流電動(dòng)機(jī)取代單相交流電動(dòng)機(jī)已是很大的進(jìn)步,省去了大電容,操作更加安全,尤其利用第三相的感生電動(dòng)勢(shì),省略了位置傳感器,整套系統(tǒng)結(jié)構(gòu)更簡(jiǎn)單,運(yùn)行更加穩(wěn)定,故障率更低。然而,也有不足的地方需要改善,起動(dòng)程序復(fù)雜,并且起動(dòng)的時(shí)候可控性較差,要達(dá)到一定轉(zhuǎn)速后才變得可控,除此以外,電動(dòng)機(jī)無(wú)法調(diào)速,并不能做到精細(xì)控制,但這并不影響密度儀器的開關(guān)腿。
