基于偏置繼電反饋的多變量對象閉環辨識方法
2018-09-04 09:37:16張遷王亞剛王凱
軟件導刊 2018年6期
張遷 王亞剛 王凱

摘 要:由于工業中多變量控制對象的復雜性、耦合性等特點,使得在針對這類對象的辨識過程中往往存在較大難度。提出一種基于偏置繼電反饋的多變量閉環辨識方法,主要通過偏置繼電反饋實驗獲取多變量閉環對象從振蕩到穩定的輸入輸出信號,根據獲取信號在主要頻率段的頻率特性辨識對象模型,有效克服了傳統繼電反饋法測試時間長,辨識模型精度不高的缺點。
關鍵詞:模型辨識;多變量;閉環回路;頻率響應
DOI:10.11907/rjdk.172968
中圖分類號:TP319
文獻標識碼:A 文章編號:1672-7800(2018)006-0178-03
Abstract:Many multi-variable process objects cant be identified easily because of the objects complexity and coupling. A technique of closed-loop modeling identification for multi-variable processes based on biased-relay feedback experiment is proposed in this paper. It gets the main input and output signals from oscillation to stability in the biased-relay feedback experiment. After analyzing and discussing the signals, we can find the main frequency band of the object and then identify the model, which can overcome the limitations of traditional relay feedback about long testing time and low precision of identification model.
Key Words:modeling identification; multi-variable; closed-loop; frequency response
0 引言
在實際工業生產中,經常出現多輸入多輸出過程的對象,這種多變量過程對象往往具有復雜性、非線性、耦合性等特征,使得這類對象的辨識難度較大。針對這類對象的傳統辨識方法雖然很多,如Van den Hof等[1]提出了基于開環轉換的兩階段閉環辨識方法,但是由于考慮到實際工業系統的安全性等因素,不允許進行開環實驗,所以該方法不太適用;除此之外也有通過閉環繼電反饋實驗進行多變量過程辨識,對繼電實驗對象的輸入輸出信號進行分解[2-5]辨識,然而在對多變量過程對象辨識的過程中,往往需要對多變量過程對象進行解耦,將多輸入多輸出對象轉換為多個單輸入單輸出對象[6],但是在實際工業生產中,許多輸入變量不能直接改變設定值,如發電廠協調控制系統[7-8];而對于這類不可操作變量輸入信號的回路,可以進行繼電反饋實驗獲得對象的某些特性,如火電廠可以通過修改PID控制模塊[9-10]的上下限實現系統的臨界震蕩。但是傳統的繼電反饋實驗只能求取對象的臨界點,對于對象的增益需要單獨求取,這就增加了辨識的復雜度并且降低了辨識模型的精度。
本文提出的基于偏置繼電反饋的多變量閉環辨識方法,有效地解決了傳統繼電反饋方法求取模型參數的局限性。首先通過多變量閉環對象各個回路進行偏置繼電反饋實驗,獲取過程對象從開始振蕩到穩定的這段時間內的輸入輸出數據,然后通過輸入輸出數據分析,可以獲得信號在其主要頻率段的頻率特性。該方法能有效減少解耦過程帶來的誤差影響,大大提高復雜多變量過程對象的辨識精度。
1 對象的頻率特性分析
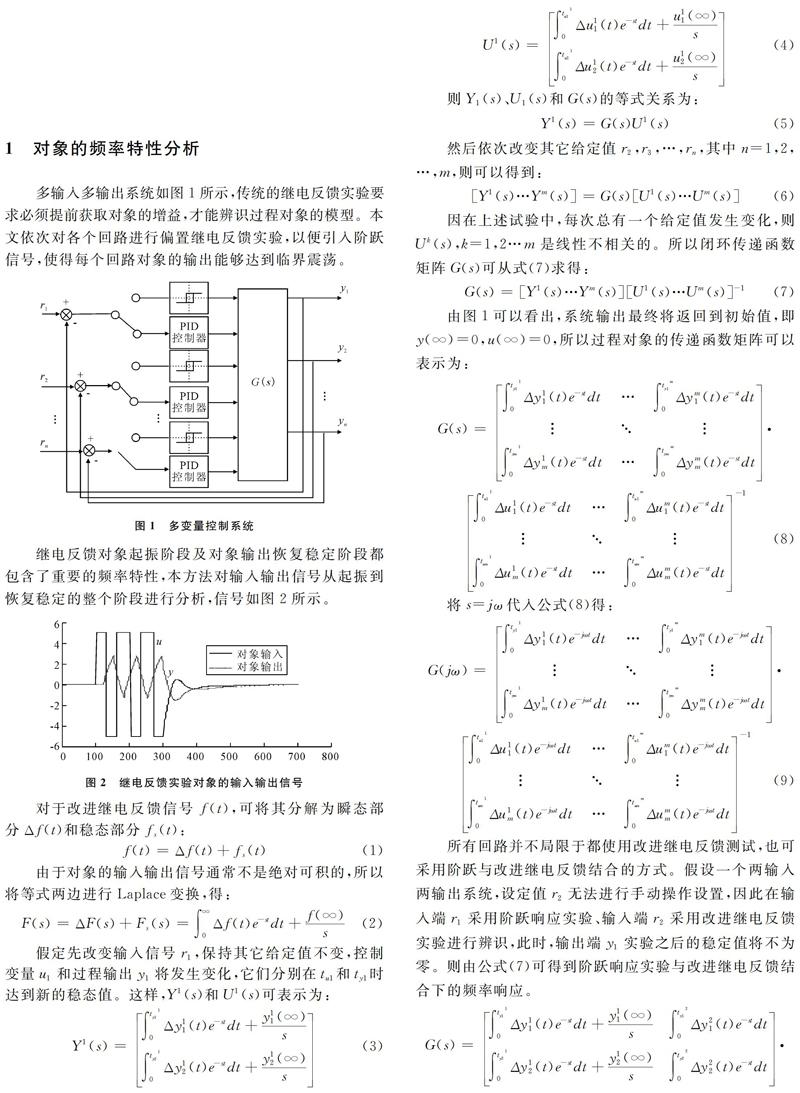
多輸入多輸出系統如圖1所示,傳統的繼電反饋實驗要求必須提前獲取對象的增益,才能辨識過程對象的模型。本文依次對各個回路進行偏置繼電反饋實驗,以便引入階躍信號,使得每個回路對象的輸出能夠達到臨界震蕩。
繼電反饋對象起振階段及對象輸出恢復穩定階段都包含了重要的頻率特性,本方法對輸入輸出信號從起振到恢復穩定的整個階段進行分析,信號如圖2所示。
所有回路并不局限于都使用改進繼電反饋測試,也可采用階躍與改進繼電反饋結合的方式。假設一個兩輸入兩輸出系統,設定值r-2無法進行手動操作設置,因此在輸入端r-1采用階躍響應實驗、輸入端r-2采用改進繼電反饋實驗進行辨識,此時,輸出端y-1實驗之后的穩定值將不為零。則由公式(7)可得到階躍響應實驗與改進繼電反饋結合下的頻率響應。
2 傳遞函數模型
由于偏置繼電反饋實驗的輸入信號在低頻段的幅值較小,因此選擇在頻率段(ω-n/2,ω-n)內取M個點求解最終的傳遞函數模型:
3 仿真實驗
為了檢驗本方法在噪聲環境下的準確性,在仿真實驗中引入信噪比率(SNR)。
在SNR=20%的噪聲環境下,采用本方法得到頻率響應以及模型的Nyquist曲線圖,如圖3所示(實線為實際對象的Nyquist圖,×為辨識出的頻率響應點,點劃線為辨識出的對象模型的Nyquist圖)。
4 結語
基于改進繼電反饋的多變量過程模型的閉環頻域辨識方法彌補了傳統階躍響應測試的不足,有效克服了傳統繼電反饋和改進繼電反饋的辨識弊端,可以利用改進繼電反饋實驗獲取多變量過程對象在重要頻率范圍內的頻率特性,進而對其模型進行辨識。仿真結果表明,本方法在多變量辨識中具有很好的可行性和適用性。
參考文獻:
[1] VAN DEN HOF P M J, HEUBERGER P S C, BOKER J. System identification with generalized orthonormal basis functions[J]. Automatic,1995,31(12):1821-1834.
[2] WANG Y G, XU X M, CAI W J. Online identification of process systems in the frequency domain[J]. International Journal of Computer Applications in Technology,2011,41(1):11-16.
[3] WANG Y G, XU X M. Adaptive PID controllers with specifications on phase and amplitude margins[C].Modelling, Identification & Control (ICMIC), 2012 Proceedings of International Conference on IEEE,2012:895-900.
[4] 王亞剛,戴自祥,邵惠鶴.基于頻域辨識的自整定PID控制器[J].自動化儀表.2000,21(08):9-13.
[5] 王亞剛,許曉鳴.復雜多變量過程模型的閉環頻域辨識[J].控制與決策,2010,25(6):825-830.
[6] 王在波,趙敏.基于偏置繼電反饋的閉環辨識方法[J].電子科技,2015,28(12):167-166.
[7] 劉吉臻.協調控制與給水全程控制[M].北京:水力電力出版社,1995.
[8] 李成東,陳紹東,邵惠鶴,段培勇.基于獨處階躍法的多變量階躍模型辨識[J].信息與控制,2000(3).
[9] 房方.單元機組協調控制系統的先進控制策略研究[D].北京:華北電力大學,2005.
[10] 李少遠,蔡文劍.工業過程辨識與控制[M].北京:化學工業出版社,2005.
(責任編輯:江 艷)