等厚干涉實驗中牛頓環暗紋直徑自動測量方法
2018-09-04 12:48:44諶建飛文勇軍唐立軍
實驗技術與管理 2018年8期
鄧 敏, 趙 丹, 諶建飛, 周 旋, 文勇軍, 唐立軍
(1. 長沙理工大學 物理與電子科學學院, 湖南 長沙 410114; 2. 近地空間電磁環境監測與建模湖南省普通高校重點實驗室, 湖南 長沙 410114)
等厚干涉實驗是大學物理實驗的基本實驗項目。實驗的關鍵在于準確測量干涉圖像暗紋的直徑。傳統的牛頓環實驗采用目測讀數,為提高精度需測量十幾到幾十環暗紋直徑,計算量大;顯微鏡視場范圍小,由于視覺疲勞引起的計數錯誤會導致誤差增大[1]。為解決人工計算問題,已經有多種檢測方法,比如基于對稱相關、偽彩色增強等各種圖像算法研究[2-4],還有采用線陣CCD與計算機軟件結合的自動測量方法[5-7],但一般局限于替代人工測量,有的僅用于教師給學生演示,對學生實驗能力培養作用不大。本文利用本實驗室的遠程實驗平臺[8-10],以等厚干涉實驗為研究對象,探索一種有利于學生自我訓練的牛頓環暗紋直徑測量方法,實現遠程實驗操作。
1 系統原理與設計

本設計的測量系統主要由視頻采集部分、圖像處理部分以及遠程實現下的電機控制部分組成。系統結構框圖見圖1。視頻采集部分用攝像頭從讀數顯微鏡目鏡采集牛頓環圖像;通過遠程操作電機控制部分轉動讀數顯微鏡微調手輪,得到不同狀態下的牛頓環圖像和相應移動距離;圖像處理部分則通過微處理器對得到的牛頓環圖像進行處理得到牛頓環各級暗紋直徑,再通過逐差法計算得到透鏡的曲率半徑值,并可將暗紋直徑和曲率半徑值發送至網頁端。

圖1 系統結構框圖
2 系統實現
攝像頭采集牛頓環圖像后,經灰度變換、圖像降噪、圖像二值化等預處理操作后,根據牛頓環圖像明暗相間的特點,利用投影特征識別算法讀取暗紋直徑,根據定標得到的比例系數得到暗紋直徑的尺寸,完成透鏡曲率半徑的計算。
2.1 牛頓環圖像采集程序設計
圖像采集部分采用mjpg-streamer流媒體服務器進行目鏡下的視頻信息采集,每隔一段時間發送一幀圖像到圖像處理線程進行參數測量。Mjpg-streamer是一款輕量級的視頻流服務器軟件,輸入組件input_uvc.so直接調用USB攝像頭驅動程序,從攝像頭讀取視頻數據,同時將視頻圖片壓縮為JPEG格式,然后將視頻數據復制到內存中。輸出組件output_http.so是一個完全符合http標準的web服務器,將輸入組件中已經壓縮為JPEG格式的圖片根據現有M-JPEG標準以http視頻數據流的形式輸出[9];輸出組件output_file.so用來抓取圖像,可將輸入組件的JPEG圖像存儲到特定的圖像文件。本方法將采集的圖像以視頻流的形式輸出至網頁端同時每隔2 s將圖片保存至樹莓派圖像處理程序目錄下。
2.2 牛頓環圖像處理設計
等厚干涉實驗采用鈉光燈作為光源,獲取的牛頓環圖像里含有較多噪聲,對比度不高,對暗紋直徑測量造成較大干擾,因此在暗紋特征提取前需要對圖像進行預處理。為減少后續的圖像計算量,縮短系統的處理時間,首先將采集的牛頓環圖像轉變成8位的灰度圖像。
對于牛頓環圖像而言,圖像邊緣細節特征尤為重要,會影響到后續對暗紋特征提取時的有效性和可靠性。因此對牛頓環圖像的噪聲進行抑制時應盡量保留細節特征。本文選用的雙邊濾波是一種非線性的濾波方法,是結合圖像的空間鄰近度和像素值相似度的一種折中處理,同時考慮空域信息和灰度相似性,因此可以在濾除牛頓環圖像噪聲的同時保持圖像的大體分塊進而保留圖像中暗紋的邊緣信息。
為了將感興趣區域(暗紋)和背景分離,需要將圖像轉換為二值圖像。對于光照不均勻的牛頓環圖像,為產生較好的二值化圖像應選用自適應閾值算法。根據像素的鄰域塊的像素值分布來確定該像素位置上的二值化閾值,從而把牛頓環圖像中的暗環分割出來。預處理過程如圖2所示。

圖2 預處理過程圖
2.3 牛頓環暗紋直徑識別和測量算法設計
2.3.1 定標
由于數字圖像是以像素為基本單位,在進行暗紋直徑測量前應對整個系統進行長度標定。本文利用測微目鏡拍出的標準刻度——游標卡尺的刻度來定標。在測試中,同等高度時在視野范圍內拍出游標卡尺的刻度為5 mm。每個像素代表的物理尺寸N=視野長度/目標區域直徑像素,本系統N=5/545。使用帶刻度的目鏡標尺來驗證此定標結果。測得游標卡尺上1 mm為50格,目測第一級暗紋直徑約為85格,測得第一級暗紋直徑的像素個數為188,所以比例系數N=1.7/188。相對誤差為0.000 13。可以認為比例系數是正確的,即定標成功。
2.3.2 基于投影特征識別的暗紋直徑測量算法設計
對得到的牛頓環二值化圖像沿垂直方向投影來測量牛頓環的暗紋直徑。對于二值化圖像f(x,y),對其列進行疊加累計求和得到一維向量S,一維向量中的每個數代表第幾列的灰度累計值。在暗紋中心處會累積最多的像素出現峰值[12]。對稱的峰值個數為暗紋個數,且對稱峰值間的距離為暗紋直徑。投影曲線的波峰存在于曲線的極值點處,即圖像變化為零的點。文中圖像投影曲線是離散的,因此通過求差分函數來求投影曲線的峰值。 利用差分法確定暗紋位置為圖3中所示。

圖3 確定暗紋位置
對于牛頓環中心位于視野中心的圖片來說,由于視野中的牛頓環圖像不一定是左右完全對稱的,即左右邊的暗紋級數不一定相同,因此需要先判斷視野中有幾個完整的暗紋。可以很明顯地看出第一級暗紋和圖像中心叉絲間的距離比各級暗紋間距離都大,可根據此特點來判斷完整暗紋個數。然后再將對應的成對峰值處像素相減得到暗紋直徑。最后根據定標比例系數換算為物理尺寸,再按照逐差法求得牛頓環的曲率半徑。整個直徑讀取流程如圖4所示:
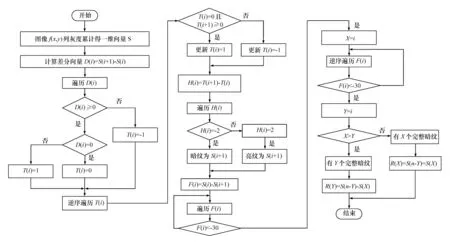
圖4 牛頓環暗紋直徑讀取流程
3 遠程實驗測量
由于實驗中測量的干涉條紋越多,測量的精度越高,因此在等厚干涉實驗遠程實現中,為提高實驗精度,同時更大程度還原傳統實驗步驟,增強實驗操作體驗,采用牛頓環中心位于視野左、右端時的兩張圖像及其對應的移動距離進行處理。測量中投影后峰值圖像如圖5所示,第一、二級暗紋在圖中標出。由于左右移動時光照亮度不均勻,后段暗紋未能確定其準確的峰值位置。

圖5 左、右端圖像垂直投影圖
遠程實驗時具體操作如下:
(1) 調節牛頓環中心在視野中心,取圖進行處理得到暗紋直徑,按逐差法計算得到牛頓環曲率半徑(此步驟可用于與下述測量結果進行比較);
(2) 轉動測微鼓輪使目鏡筒往左邊移動至第一級亮紋處于邊緣位置,記錄此時目鏡相比第一步時的移動距離(此距離可通過光電編碼器反饋得到[10]);
(3) 取此時的牛頓環圖像進行處理、得到左邊后25個峰值位置(暗紋個數可調整),根據定標比例系數換算為物理尺寸,峰值位置減去鏡筒移動距離則為暗紋的左位置;
(4) 轉動測微鼓輪使目鏡筒往右邊移動至第一級亮紋處于邊緣位置,記錄此時目鏡相比第一步時移動距離;
(5) 取此時的牛頓換圖像進行處理得到右邊前25個峰值位置,根據定標比例系數換算為物理尺寸,峰值位置加上鏡筒移動距離則為暗紋直徑的右位置;
(6) 暗紋左、右位置相減得到各級暗紋的直徑,按逐差法計算牛頓環曲率半徑。
4 系統測試
以測量曲率半徑為855 mm的透鏡為例,驗證本方法測量暗紋直徑的準確性。傳統測量方法、單圖測量方法以及多圖測量方法下第一次測試得到的牛頓環暗紋直徑數據記錄如表1所示,3種方法進行多次測量得到牛頓環曲率半徑結果如表2所示。本研究采用的光源為黃鈉光燈,波長λ為589.3nm。
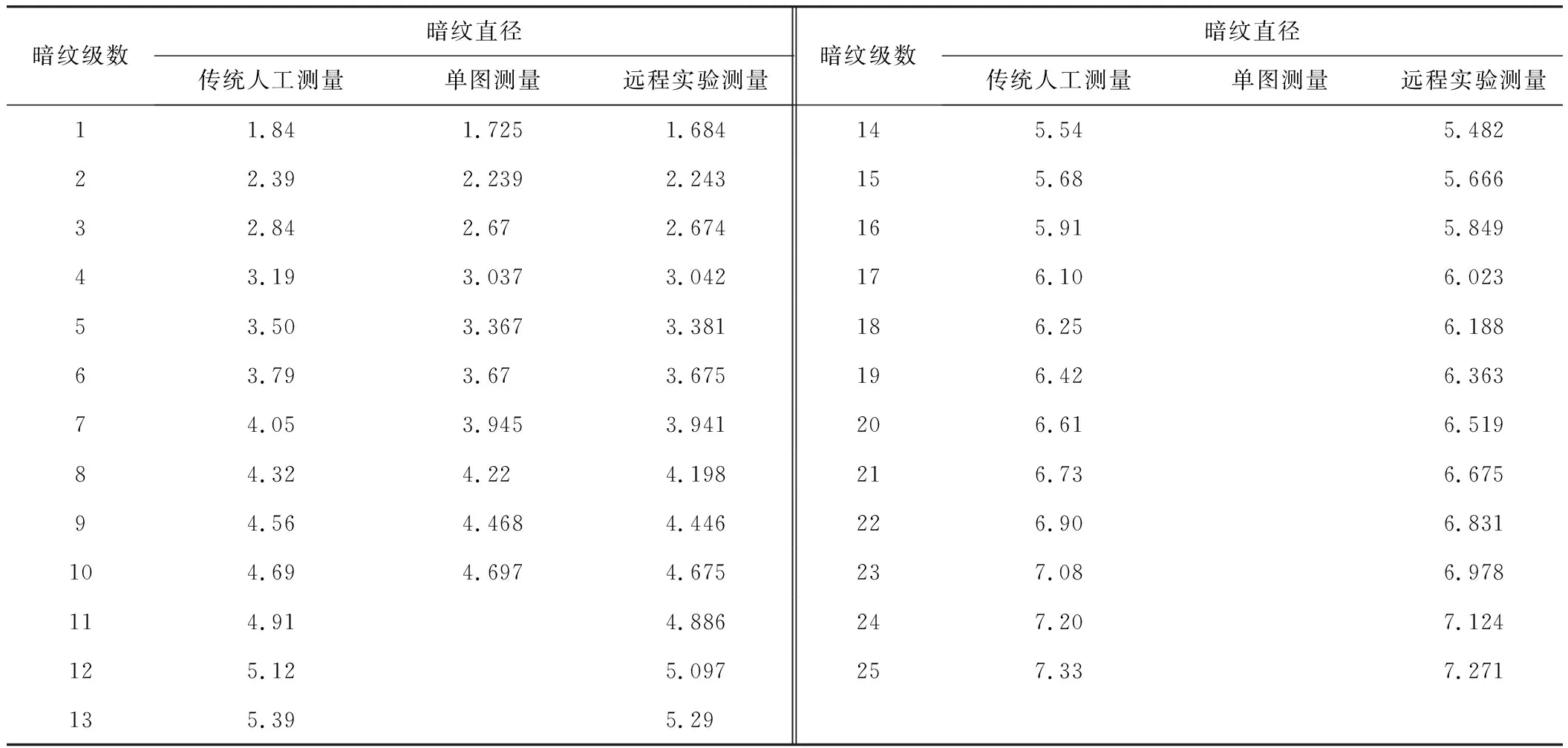
表1 3種方法測得暗紋直徑(第一次測試) mm
如表1和表2所示,當采用傳統人工測量方式時,取m-n=10,人工測量方式受不同實驗者的主觀因素影響較大,因此誤差波動較大。對單張牛頓環中心位于視野中心的圖片測量時,取m-n=5,由于視野范圍內暗紋級數少,讀數顯微鏡的測量叉絲和干涉條紋對準時產生的定位誤差大,所以測量誤差較大。遠程實驗測量方式下,取m-n=10,由于減少了主觀因素和部分客觀因素影響,測量誤差波動較小且精度提高。
在本方法測量過程中誤差來源主要為攝像頭采集圖像時產生的畸變、牛頓環儀調節不當產生的暗紋形變以及鈉光燈光場亮度,需通過后續校準來實現更高精度的測量。
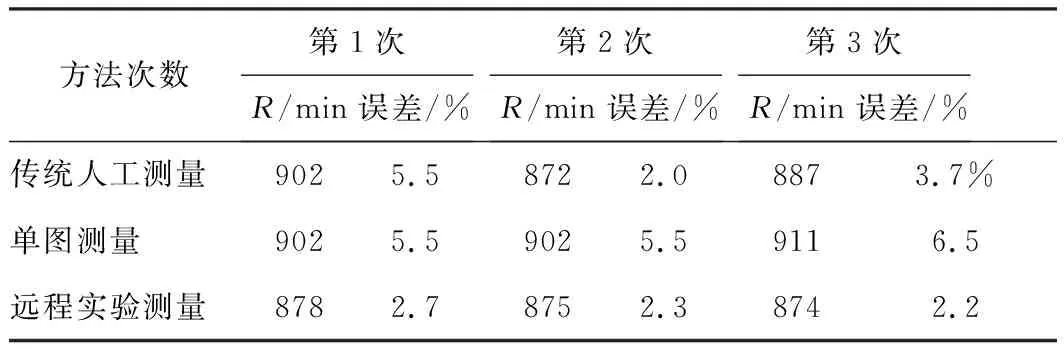
表2 3種方法3次測量的牛頓環曲率半徑結果
5 結論
將圖像處理技術用于等厚干涉實驗中的牛頓環曲率半徑自動測量中,根據牛頓環圖像明暗相間特點,采用投影特征識別方法,實現了一種可用于遠程實驗中的牛頓環暗紋直徑自動測量方法。測量結果表明,該方法優于傳統的人工判讀測量,是一種有效的牛頓環測量方法,應用于遠程等厚干涉實驗,實驗體驗效果好,測量精度較高,誤差在2.2%~2.7%,測量速度快,提高了實驗效率,有利于遠程實驗開放。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
