多特征、多方法融合的高分辨率影像道路網(wǎng)提取
2018-09-04 09:33:38李潤生曹帆之王淑香
自然資源遙感 2018年3期
關(guān)鍵詞:特征
李潤生, 曹帆之, 曹 聞, 王淑香
(信息工程大學(xué)數(shù)據(jù)與目標(biāo)工程學(xué)院,鄭州 450001)
0 引言
隨著對地觀測技術(shù)、傳感器技術(shù)的飛速發(fā)展,遙感影像的空間分辨率逐步提高,如何在高分辨率遙感影像上自動(dòng)獲取地物信息(道路、居民地等)是高分影像處理領(lǐng)域需要重點(diǎn)解決的問題之一[1]。遙感影像道路網(wǎng)提取一直受測繪遙感和計(jì)算機(jī)視覺等領(lǐng)域?qū)W者的廣泛關(guān)注,相關(guān)學(xué)者做了大量研究工作,多種道路網(wǎng)提取算法相繼涌現(xiàn)[2-6]。Mean和Poullis對現(xiàn)有的遙感影像道路網(wǎng)提取算法進(jìn)行了全面的分析總結(jié),根據(jù)算法中信息利用的層次將道路提取方法分為3類: 基于像素的道路提取方法、基于區(qū)域的道路提取方法和基于知識的道路提取方法[7-8]。
基于區(qū)域的提取方法是目前最常用的道路網(wǎng)提取算法。這類方法通過影像分類或圖像分割完成道路網(wǎng)的粗提取,然后根據(jù)某些規(guī)則進(jìn)行細(xì)化操作,最終完成道路網(wǎng)的提取。Song等運(yùn)用支持向量機(jī)根據(jù)光譜信息從影像上提取道路類,但由于遙感影像上存在同物異譜和異物同譜等問題,這種方法很難取得令人滿意的分類結(jié)果[9]。基于此原因,史文中等人同時(shí)利用空間-光譜信息和道路同質(zhì)屬性進(jìn)行道路分類,達(dá)到了不錯(cuò)的效果[10-12]。考慮到高分辨率遙感影像上的道路特征非常復(fù)雜,Das等設(shè)計(jì)了一種利用顯著特征提取道路網(wǎng)的多級框架[13]。在以上方法中,概率支持向量機(jī)被用來完成分類任務(wù)。但在道路提取中所使用的分類方法大都為監(jiān)督分類,因此為了達(dá)到理想的分類精度,需要大量的訓(xùn)練樣本。由于影像上的道路復(fù)雜多變,這些算法只能在某類遙感影像上針對特定道路展示出優(yōu)良的性能,但卻無法適用于其他類型的道路。因此如何定義普適性的道路特征仍有待進(jìn)一步研究。高分辨率影像上道路呈現(xiàn)為具有同質(zhì)性特征的條帶狀目標(biāo),在空間分布上道路目標(biāo)自身具有最大的相似性,而與周圍其他地物具有最大的差異性。另外,高分辨率影像上地物存在同物異譜或異物同譜現(xiàn)象,僅用單一特征和技術(shù)無法準(zhǔn)確提取地物信息,因此融合多特征、多方法獲取目標(biāo)信息是該領(lǐng)域的發(fā)展方向。
1 算法基本原理
本文綜合利用道路呈現(xiàn)的光譜、空間、同質(zhì)性、幾何等多種特征,提出了一種高分辨率遙感影像道路網(wǎng)自動(dòng)提取算法。算法運(yùn)用非監(jiān)督分類方法完成圖像聚類,并利用Gabor濾波和張量編碼實(shí)現(xiàn)道路類自動(dòng)識別,因此不需要訓(xùn)練樣本; 同時(shí)借助感知編組理論從道路類中生成光滑連續(xù)且不含毛刺的道路網(wǎng)。首先利用均值漂移算法對遙感影像進(jìn)行預(yù)處理,生成包含道路中心點(diǎn)的穩(wěn)態(tài)點(diǎn)圖; 然后采用均值漂移聚類算法對穩(wěn)態(tài)點(diǎn)圖進(jìn)行分類,并運(yùn)用Gabor濾波和張量編碼,以線性顯著性最大為準(zhǔn)則識別道路中心點(diǎn)類; 最后,運(yùn)用張量投票和連通成分分析從道路中心點(diǎn)類中生成道路網(wǎng)。算法流程如圖1所示。
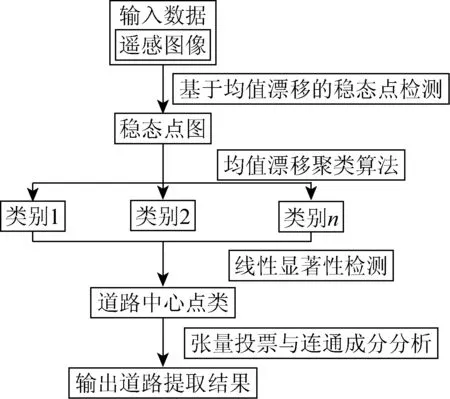
圖1 道路網(wǎng)提取流程Fig.1 Flow chart of road networks extraction
1.1 圖像穩(wěn)態(tài)點(diǎn)圖生成
穩(wěn)態(tài)點(diǎn)是d維空間內(nèi)一系列樣本點(diǎn)對應(yīng)的概率密度函數(shù)的局部極值點(diǎn)。本文運(yùn)用均值漂移算法[14],在5維空間內(nèi)(由平面坐標(biāo)空間和光譜空間組成)求解圖像點(diǎn)對應(yīng)概率密度函數(shù)的穩(wěn)態(tài)點(diǎn),生成穩(wěn)態(tài)點(diǎn)圖。
均值漂移最初由Fukunaga等人在1975年研究概率密度函數(shù)的梯度估計(jì)時(shí)提出[15]。經(jīng)過30 a的發(fā)展,已被廣泛應(yīng)用于圖像平滑、圖像分割和目標(biāo)追蹤等領(lǐng)域。Cheng對均值漂移算法進(jìn)行了擴(kuò)展使得其適用范圍大大擴(kuò)充[16]。改進(jìn)后的均值漂移數(shù)學(xué)形式為
(1)
式中,w(xi)≥0為權(quán)重函數(shù);GH(xi-x)為核函數(shù),即
GH(xi-x)=|H|-1/2G(H-1/2(xi-x)),
(2)
式中,G(x)是一個(gè)單位核函數(shù);H是一個(gè)d×d的正定帶寬矩陣。
本文所使用的核函數(shù)為平面核函數(shù),即
(3)
式中,H表示d×d對角帶寬矩陣。
對于帶狀同質(zhì)區(qū)域內(nèi)的點(diǎn),其概率密度函數(shù)的穩(wěn)態(tài)點(diǎn)通常位于帶狀區(qū)域的中心線上,如圖2所示。圖2(a)和圖2(b)用紅線標(biāo)記了均值漂移算法檢測到的穩(wěn)態(tài)點(diǎn)位置,x和z表示光譜坐標(biāo),y表示穩(wěn)態(tài)點(diǎn)位置。
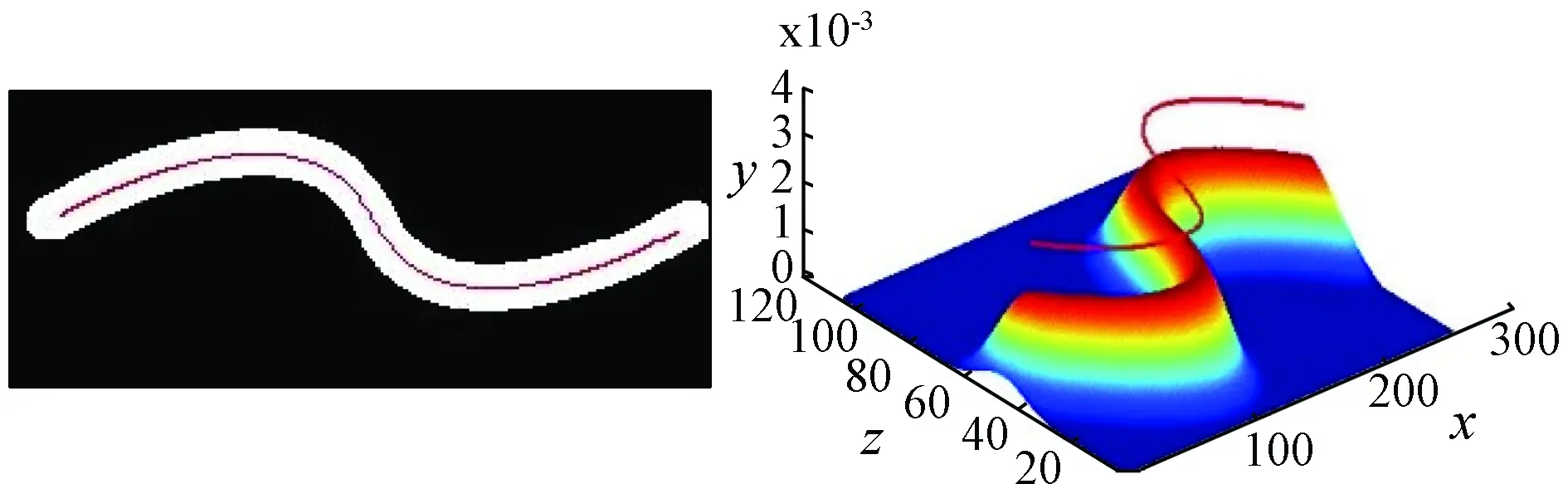
(a) 原始影像與穩(wěn)態(tài)點(diǎn) (b) 概率密度函數(shù)與穩(wěn)態(tài)點(diǎn)
圖2帶狀區(qū)域的穩(wěn)態(tài)點(diǎn)圖示
Fig.2Steady-statepointmapofstrip-shapedregion

1.2 基于均值漂移算法的道路中心點(diǎn)聚類
該算法運(yùn)用均值漂移聚類算法根據(jù)光譜特征對穩(wěn)態(tài)點(diǎn)圖進(jìn)行分類,將道路中心點(diǎn)類與其他地物類分離。均值漂移聚類算法是對基于均值漂移的穩(wěn)態(tài)點(diǎn)檢測的直接擴(kuò)充,將在特征空間上收斂于同一穩(wěn)態(tài)點(diǎn)的像元點(diǎn)歸作一類。設(shè)xi和zi,i=1,...,n,分別為5維圖像點(diǎn)和其對應(yīng)概率密度函數(shù)的穩(wěn)態(tài)點(diǎn),Li為圖像點(diǎn)xi的標(biāo)記。具體計(jì)算步驟為:
1)對于圖像點(diǎn)xi,運(yùn)用均值漂移算法計(jì)算其對應(yīng)的穩(wěn)態(tài)點(diǎn)zi。
2)對任意兩個(gè)穩(wěn)態(tài)點(diǎn)zi和zj,當(dāng)其平面空間距離小于空間帶寬參數(shù)hs并且其光譜距離小于光譜距離hr時(shí),合并這兩個(gè)穩(wěn)態(tài)點(diǎn),即zi′=(zi+zj)/2。其中,空間帶寬參數(shù)hs和光譜距離hr為經(jīng)驗(yàn)值,選取方法可參考文獻(xiàn)[18]。
3)重復(fù)第2)步,直到所有穩(wěn)態(tài)點(diǎn)zi不再發(fā)生變化。
4)將剩余穩(wěn)態(tài)點(diǎn)zi作為聚類中心{Cp}p=1,2...,m,m為聚類中心個(gè)數(shù)。對于每一個(gè)像素點(diǎn)xi,賦值Li={p|xi∈Cp}。
5)優(yōu)化處理,排除元素個(gè)數(shù)小于M的類Ck。
1.3 道路中心點(diǎn)類自動(dòng)識別
遙感影像上道路線狀特征明顯,本節(jié)主要根據(jù)這一特征進(jìn)行道路中心點(diǎn)類的自動(dòng)識別。首先運(yùn)用Gabor濾波從穩(wěn)態(tài)點(diǎn)分類圖中提取線狀高頻信息,然后將提取信息編碼為張量形式,最后運(yùn)用張量運(yùn)算進(jìn)行信息分析,提取線狀特征。
1.3.1 Gabor濾波
Gabor濾波起源于傅里葉變換,由物理學(xué)家Dennis Gabor在1946年提出,用于解決傅里葉變換無法分析局部信息的問題[17]。Daugman在他的基礎(chǔ)上,將1維Gabor函數(shù)擴(kuò)展至2維,并證明了2維Gabor濾波能夠很好地模擬人類視覺單細(xì)胞的感受野函數(shù)[18]。2維Gabor濾波便被廣泛應(yīng)用于圖像處理、特征提取、紋理分析等領(lǐng)域。
2維Gabor濾波g(x,y)可被定義為
(4)
式中,σx和σy分別高斯橢圓函數(shù)沿著x軸和y軸方向的標(biāo)準(zhǔn)差;f和θ分別為濾波器的頻率和旋轉(zhuǎn)角。由式(4)可知,Gabor濾波實(shí)質(zhì)是關(guān)于參數(shù)f和θ的函數(shù)。通過選擇不同參數(shù)f和θ,Gabor濾波能夠運(yùn)用卷積運(yùn)算提取圖像上不同朝向的頻率信息。因此,Gabor濾波被視為尺寸和角度可調(diào)的線或邊緣檢測器,廣泛用于圖像處理領(lǐng)域。本文運(yùn)用一組Gabor濾波器提取穩(wěn)態(tài)點(diǎn)分類圖中的線狀高頻信息,選擇均勻分布在區(qū)間[0,π]的8個(gè)角度θi和5種頻率fi作為濾波器參數(shù),總共40個(gè)濾波器。
1.3.2 張量編碼
Medioni在其提出的張量投票框架中,將數(shù)據(jù)幾何信息編碼為張量形式,用于圖像的幾何特征推斷[19-20]。本文用2階對稱張量表示Gabor濾波捕獲的朝向信息,然后通過張量運(yùn)算檢測分類圖上的線狀特征。2維空間的2階對稱張量的數(shù)學(xué)定義為
(5)

(6)
在本文中,算法根據(jù)以下規(guī)則檢測每一類樣本點(diǎn)中的曲線點(diǎn): ①對于每一個(gè)曲線點(diǎn),它的線顯著性(λ1-λ2)應(yīng)該大于它的球顯著性λ2; ②對于每一個(gè)曲線點(diǎn),它的線顯著性(λ1-λ2)應(yīng)該是沿著其法線方向的局部極大值點(diǎn)。
1.4 道路網(wǎng)組網(wǎng)
張量投票是由Medioni等人于2000年提出來的一種感知編組方法,被廣泛應(yīng)用于機(jī)器視覺和機(jī)器學(xué)習(xí)中[19]。本文運(yùn)用張量投票算法對道路中心點(diǎn)進(jìn)行連接生成道路網(wǎng)。
在2維張量投票中,幾何信息可通過棍投票(stick voting)進(jìn)行傳遞和精煉,而在投票結(jié)束之后,便通過投票分析推斷幾何結(jié)構(gòu)特征(點(diǎn)或線)。圖3介紹了棍投票過程,圖中O點(diǎn)為投票點(diǎn),P點(diǎn)為信息接收點(diǎn),C點(diǎn)為一個(gè)同時(shí)經(jīng)過點(diǎn)P和點(diǎn)O的圓的圓心。
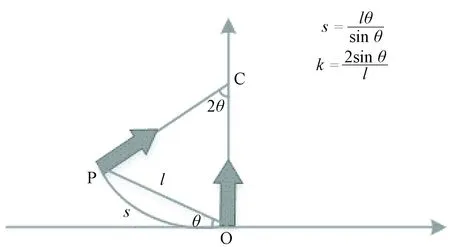
圖3 棍投票過程Fig.3 Process of stick voting
投票的顯著性衰減函數(shù)為
(7)
(8)
式中,s表示點(diǎn)O,P之間的弧長;k表示曲率,σ為尺度因子,決定了投票的大小。
2 試驗(yàn)及分析
2.1 道路網(wǎng)提取試驗(yàn)
挑選一幅大小為512像元×512像元的航空影像進(jìn)行道路網(wǎng)提取試驗(yàn),結(jié)果如圖4所示。圖4(a)為原始影像,圖4(b)為提取結(jié)果,其中紅線為提取的道路中心線。從圖4(b)可知,本文算法能夠準(zhǔn)確地提取整個(gè)道路網(wǎng),展示出了較好的性能。

(a) 測試影像 (b) 道路網(wǎng)提取結(jié)果(紅線標(biāo)示)
圖4道路網(wǎng)提取試驗(yàn)1
Fig.4Thefirstexperimentofroadnetworksextraction
為了進(jìn)一步測試算法的性能,挑選2幅影像進(jìn)行測試(見圖5(a)和圖5(c)),其中,圖5(a)為0.61 m分辨率的QuickBird的衛(wèi)星彩色影像,影像區(qū)域?yàn)閲饽吵鞘校跋翊笮?54像元×387像元。圖5(c)為1.65 m分辨率GeoEye-1衛(wèi)星彩色影像,影像區(qū)域?yàn)榧幽么蠡F盧地區(qū),影像大小為1 276像元×1 261像元。測試結(jié)果如圖5(b)和圖5(d)所示。
(a) 測試影像一 (b) 道路網(wǎng)提取結(jié)果一

(c) 測試影像二 (d) 道路網(wǎng)提取二
圖5道路網(wǎng)提取試驗(yàn)2
Fig.5Thesecondexperimentofroadnetworksextraction
從圖5可知,本文算法能夠從影像上光滑地描繪道路中心線。但由圖5(b)可知,本文算法未能從影像上提取完整的道路網(wǎng),如圖中綠線所示。這主要是由于本文算法比較依賴道路的光譜特征和同質(zhì)屬性,因此當(dāng)部分道路區(qū)域的光譜屬性發(fā)生改變時(shí),均值漂移算法無法準(zhǔn)確檢測這部分道路段的中心點(diǎn),因而無法將其識別為道路中心點(diǎn)類,最終導(dǎo)致這部分道路提取失敗。
圖5(c)整幅影像道路場景復(fù)雜,影像上道路寬度變化較大,主干道寬度較大,附屬小路寬度較小。另外,道路材質(zhì)包括柏油路面、水泥路面以及土質(zhì)小路。道路邊界特征較弱,路面干擾因素種類較多。提取過程中認(rèn)為設(shè)定的空間帶寬參數(shù)為: 兩條主干道hs=27。從圖5 (d)提取結(jié)果看,本文算法能夠較完整地提取復(fù)雜場景中的道路網(wǎng),而圖中綠線為未能提取的道路段,這主要是由于當(dāng)部分道路寬度突然變小時(shí),均值漂移算法自適應(yīng)性較差,無法準(zhǔn)確檢測這部分道路段的中心點(diǎn),最終導(dǎo)致這部分道路提取失敗。
2.2 對比試驗(yàn)
將本文算法與Miao等人提出的道路網(wǎng)提取算法[11]進(jìn)行比較。實(shí)驗(yàn)影像為2幅大小為512像元×512像元的QuickBird影像,實(shí)驗(yàn)結(jié)果如圖6所示,圖中的紅線為提取的道路中心線。2種算法都需要人工給定參數(shù),因此保證了比較的公平。

(a) 本文方法的提取結(jié)果1 (b) Miao所提出的方法的提取結(jié)果1 (c) 本文方法的提取結(jié)果2 (d) Miao所提出的方法的提取結(jié)果2
圖6道路提取對比實(shí)驗(yàn)
Fig.6Comparativeexperimentofroadextraction
為了評估2種算法提取的精度,使用3種評判指標(biāo)進(jìn)行精度衡量,即
完備性=TP/(TP+FN),
(9)
準(zhǔn)確度=TP/(TP+FP),
(10)
提取精度=TP/(TP+FP+FN),
(11)
式中:TP為正確提取的道路長度;FP為被錯(cuò)誤提取的道路長度;FN為未能提取的道路長度。2種方法的評判結(jié)果如表1所示。
表1道路提取精度評判結(jié)果
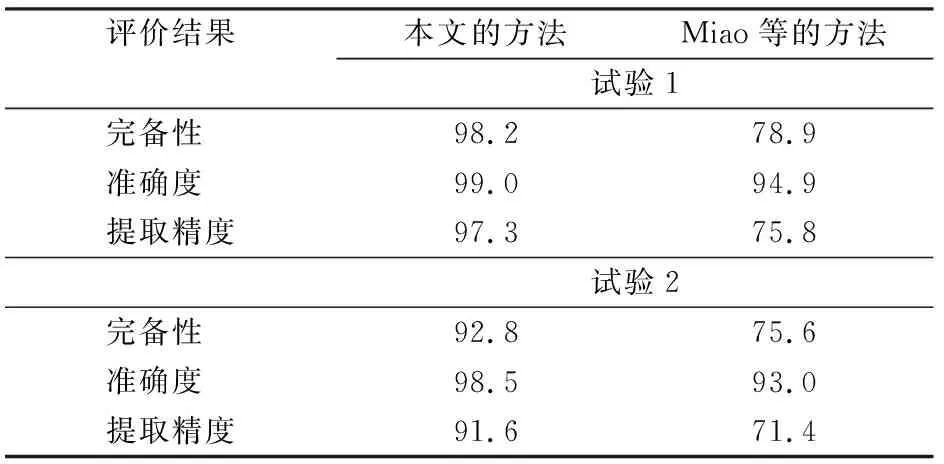
Tab.1 Evaluation results of road extraction accuracy(%)
由圖6可知,相比Miao等人所提出的算法,本文算法提取的道路中心線更加光滑,準(zhǔn)確地位于道路中心處。從表1可知,本文算法展示了良好的道路提取性能,在道路提取的完備性和精度上優(yōu)于Miao的算法。另外,從算法計(jì)算效率看,本文算法與Miao等所提算法基本持平,在試驗(yàn)環(huán)境為CPU速度2.5 GHz,8 G內(nèi)存條件下,計(jì)算圖4、圖5中3幅影像的時(shí)間分別為70 ms,78 ms和102 ms。處理時(shí)間與影像場景復(fù)雜度有關(guān),另外,算法計(jì)算過程中耗時(shí)較長的步驟為中心點(diǎn)自動(dòng)識別步驟,約占整個(gè)處理過程的2/3。后續(xù)可圍繞如何優(yōu)化識別算法進(jìn)行深入研究。
3 結(jié)論
本文提出了一種基于道路同質(zhì)屬性和形狀特征的高分辨率遙感影像道路網(wǎng)提取算法,得到如下結(jié)論:
1)本文所提出的道路網(wǎng)自動(dòng)提取算法能夠準(zhǔn)確地從高分辨率影像上提取道路網(wǎng)。
2)計(jì)算時(shí)要注意的是算法需要人工設(shè)置均值漂移帶寬參數(shù)。空間帶寬參數(shù)hs的設(shè)置應(yīng)該大于待提取道路的寬度,以保證算法能夠提取較窄道路的中心線。
3)通過試驗(yàn)對比,表明算法展示了良好的道路提取性能,在道路提取的完備性和精度上均優(yōu)于Miao的算法。從算法計(jì)算效率看,本文算法與Miao等所提算法基本持平。
4)但本文算法還存在2個(gè)局限: ①當(dāng)?shù)缆肪W(wǎng)的光譜特征發(fā)生變化或者當(dāng)其他地物具有和道路相似的光譜特性和幾何形狀時(shí),算法無法準(zhǔn)確地提取完整的道路網(wǎng)。②算法需要提前設(shè)置帶寬參數(shù)。
5)下一步可利用道路邊界梯度特征,通過少量道路種子點(diǎn)計(jì)算不同類型道路寬度,從而達(dá)到自動(dòng)設(shè)置帶寬參數(shù)的目的。另外,將引入道路拓?fù)浣Y(jié)構(gòu),增加算法的魯棒性,同時(shí)盡可能地減少人工干預(yù)。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
