無人機集群編隊控制演示驗證系統
2018-09-04 01:38:28朱創創梁曉龍張佳強何呂龍劉流
北京航空航天大學學報 2018年8期
關鍵詞:系統
朱創創, 梁曉龍, 張佳強, 何呂龍, 劉流
(空軍工程大學 空管領航學院, 西安 710051)
無人機是一種可搭載多種設備和裝置并能重復使用的無人駕駛飛行器。其具有體積小、質量輕、機動性高、隱蔽性強、造價低和無人員傷亡等特點。隨著無人機應用領域的不斷擴張,使用要求的不斷提高以及單架無人機在載荷、續航等方面局限性的凸顯,無人機的應用樣式逐步從單平臺向多平臺“集群”方向發展[1-2]。無人機集群與單無人機相比而言,能以更快、更可靠、更低廉的代價和更優良的性能來完成那些由單體無人機很難完成甚至是不可能完成的復雜任務。因此,編隊飛行作為無人機集群執行任務的基礎和基本形式成為了研究熱點。
目前多無人機編隊飛行理論方面取得了豐碩成果,除了傳統的領導-跟隨法、虛擬結構法、人工勢場法和基于行為法之外,基于一致性的編隊控制方法也吸引了研究者的目光,以上方法各有優缺點[3-4],學者對以上方法做了很多改進。如文獻[5]提出了一種基于誘導航線的協同控制方法,實現了編隊保持、避障和避碰;文獻[6]提出了虛擬結構、領導-跟隨及基于行為法相結合的方法,提高了機間通信的可靠性;文獻[7]基于雙模模型預測控制(Model Predictive Control,MPC)方法設計了領導-跟隨的控制律。當前對無人機集群編隊控制的研究,通常是建立理想的模型,然后進行地面仿真,也有少數進行了實驗。如文獻[8]將基于虛擬結構控制方法在四旋翼無人機上做了一系列實驗;文獻[9-10]將領導-跟隨協同編隊控制算法應用到固定翼無人機上進行了試驗;文獻[11]在四旋翼無人機上驗證了基于一致性的時變編隊控制理論。通過對現階段研究現狀梳理可以看出,無人機集群編隊控制理論研究已經取得了豐碩的成果,但進行實驗的較少[12];已經用于驗證的系統多為集中式控制,采用分布式實時控制的較少。而且以上實驗系統只能控制單一類型的無人機平臺,而實際無人機集群通常包含不同功能、種類的無人機平臺,因此這些實驗系統存在對不同類型無人機平臺的可移植性差、擴展性不足以及通用性不高的問題。
為了將無人機集群編隊控制理論更好地應用到實踐中,本文搭建了無人機集群編隊控制演示驗證系統。首先,采用封裝和分層控制的思想,設計了無人機控制系統,將無人機控制系統分為決策層和執行層,決策層執行編隊控制算法,執行層根據決策層或地面站的指令控制無人機運動,使得系統具備擴展性強,通用性好的特點。其次,為保證系統的可靠性和安全性,利用冗余設計的思想,采用兩套地面站和數據鏈,分別用于控制算法的演示驗證和應急處置,保證了系統的功能完備性和安全性。最后,以四旋翼無人機作為無人機平臺,對領導-跟隨協同編隊控制算法進行了飛行試驗,驗證了系統功能的可用性和可靠性。
1 系統設計與搭建
無人機集群編隊控制演示驗證系統可以在戶外環境下演示無人機集群運動過程,驗證編隊控制算法的有效性。系統可獲取集群在預設控制方法下的運動狀態,并可對試驗過程中的飛行、通信、傳感器信息進行有效監管、指揮和控制。試驗過程中數據實時保存,通過分析可以得出無人機集群編隊控制方法的運行效果。
1.1 系統總體架構
無人機集群編隊控制演示驗證系統由無人機平臺、地面站和數據鏈共同組成。為了實現系統對異構無人機集群的控制,增強系統的擴展性和通用性,利用封裝和分層控制的思想將無人機控制系統設計為決策層與執行層,執行層對無人機平臺的姿態、速度、位置進行控制,決策層運行編隊控制算法,用于控制無人機的行為。為了增強系統的穩定性、可靠性,利用冗余設計的思想,采用雙數據鏈、雙地面站的模式,兩套數據鏈和地面站獨立運行。為了避免編隊控制算法不成熟帶來的風險,地面站2直接對無人機平臺執行層進行控制,且其控制指令優先級高于地面站1,起到了應急處置的作用。
系統總體架構如圖1所示,圖中箭頭表示信息流向,演示驗證系統分為任務層、決策層和執行層。任務層的輸入信息由演示任務的類型決定,可根據不同的演示驗證任務需求,生成對應的任務指令發送至決策層,其功能由地面站實現。決策層根據任務指令、環境及自身和相鄰個體的位置、速度等狀態信息,進行分布式自主決策,生成通用的控制指令發送給執行層,其功能由無人機機載計算機實現。執行層根據決策層生成的控制指令,對無人機平臺的傳感器及運動行為進行控制,驅動無人機達到期望狀態,并將執行結果回傳給決策層,其功能由無人機底層飛行控制器實現。無人機之間以及地面站1與無人機之間通過數據鏈1(自組網通信)實現信息交互,通過調整地面站1發送不同的控制指令,系統可實現集中式、分布式和混合式3種控制方式,可以對集群不同的通信拓撲進行演示驗證。地面站2通過數據鏈2直接對無人機平臺執行層進行控制,用于試驗開始前的狀態設置、試驗過程中的應急處理、試驗結束后的平臺回收,可以確保演示驗證過程中具有較高的安全性。系統采用GPS定位模塊為無人機平臺提供實時定位導航服務,定位模塊通過串口通信與無人機平臺進行數據傳輸。
1.2 無人機控制系統
集群系統具有良好的擴展性,能夠兼容不同類型的無人機平臺,同時具有分布式控制的特點,這就要求無人機控制系統具有較強的適應性,能夠對不同類型的無人機進行有效控制,并實現對不同的分布式編隊控制方法進行驗證。本設計受智能體結構模型的啟發[13],采用分層控制[14-15]和封裝的思想[16],將無人機控制系統分為決策層和執行層分別進行設計和封裝,如圖2所示。
決策層負責編隊算法和無線組網通信等應用程序的處理,生成位置、速度等通用的決策信息,并通過串口發送給執行層。為保證無人機有充足的時間更新鄰居個體的速度、位置等狀態信息,同時節約處理器計算資源,決策層的計算頻率不大于鄰居無人機廣播自身狀態信息的頻率。根據收到的決策信息,執行層負責無人機平臺的姿態穩定以及驅動無人機達到期望狀態,并將無人機運動參數實時存儲到內置在執行層的SD卡中,以便試驗后對飛行數據進行分析。執行層將飛行數據回傳給決策層的同時也經數傳傳輸給地面站2,實現對集群運動狀態的實時監控。自組網模塊組建Mesh網絡,和執行層有雙向的數據流傳輸。整個系統采用分布式的編隊控制方法,各無人機平臺并行運行程序,執行相同的軟件流程,控制系統軟件流程如圖3所示。
由于無人機控制系統的決策層需要較大的計算量和較高的實時性,對處理器的性能有較高的要求。本設計選用基于ARM Cortex-M4核心的STM32F4系列微處理器,該處理器具有功耗較低、處理能力強等優點,滿足了試驗要求。執行層選擇開源的PIX自駕儀,PIX自駕儀是一種成熟可靠的無人載具控制器,可以控制多種類型的無人載具,如固定翼無人機、四旋翼無人機等。決策層的STM32F4和執行層的PIX通過基于Mavlink協議的串口實現信息交互。
通過分層控制,決策層可根據不同的試驗需求,植入各類編隊控制方法,使系統具有了較強的適應性和擴展性。執行層選擇開源PIX自駕儀,搭建穩定的無人機平臺,減少了程序移植工作量,提高了代碼的可重用性,可以有效縮短系統的開發周期,并能夠將試驗重點放在決策層的編隊算法開發上。通過PIX自駕儀將不同類型的無人載具封裝為無人機對象,封裝之后在對異構無人機進行控制時,只需調整自駕儀參數,不再需要根據不同類型的無人機特殊性能針對性的開發相應的控制策略,也就是決策層只需生成通用的位置、速度和傳感器開關等控制指令,即可實現異構無人機平臺的分布式協同控制。系統有效地解決了無人機平臺硬件異構的差異,具備了控制異構集群的能力。
1.3 地 面 站
地面站是演示驗證系統的指揮控制中心,可以對無人機平臺各種運動數據和傳感器參數進行實時監控,能夠對無人機下達特定指令,如任務開始、中斷、繼續和結束等。地面站還需要對多無人機平臺狀態進行監視和控制,同時對傳感器進行故障診斷和應急處理。為了增強系統的可靠性和安全性,采用冗余思想,設計了兩套地面站,分別由一臺筆記本電腦(CPU:i5 內存:4G)和相應的數據接收和發送設備組成。
地面站1采用雙串口通信,串口1負責將控制指令通過數據鏈1發送給指定無人機或者進行廣播。根據不同試驗目的,這里的控制指令既可以是中心解算生成的位置、速度指令,也可以是調用封裝在協同控制器中的控制算法指令;串口2負責實時接收無人機廣播的飛行數據,并實時存儲,也可通過MATLAB進行實時數據處理,顯示無人機的位置、速度等運動狀態,觀察運行的效果是否與期望的一致。
地面站2運行Mission planner 1.3.32和Qgroundcontrol 3.1.0兩個無人機控制軟件。Mission planner主要用來試驗前無人機參數的設置,包括最大速度、加速度和低電壓保護等,如圖4(a)所示。Qgroundcontrol用來控制多個無人機,同時觀察數據鏈2傳回的無人機狀態信息,包括電壓、電流和速度等,以對各無人機傳感器參數進行實時監控。但試驗過程中Qgroundcontrol只能對無人機逐一控制,當無人機增多時,可操行性將會降低。因此,對原Qgroundcontrol軟件進行了二次開發,增加了一鍵同時動作、同時返回功能,開發后軟件界面如圖4(b)所示。開發后可同時控制多個無人機動作,減少了試驗人員的操作步驟,使系統操作更簡單,降低了對試驗人員的技能要求,使系統更實用。例如在演示驗證無人機集群的控制算法時,通過Qgroundcontrol,地面站2可控制無人機集群同時起飛,試驗結束后可以將無人機同時收回。
1.4 數 據 鏈
在搭建演示驗證系統時,地面站與無人機以及無人機之間通信是關鍵。飛行試驗要在戶外環境中進行,無人機運動空間范圍廣、動態性高,為防止試驗過程中無人機失控、高速、可靠的無線通信是關鍵;同時,在組網方式上需要建立一個去中心化的分布式對等通信網絡,實現無人機平臺之間雙向數據通信,以交換彼此的位置和速度等狀態信息,進而完成分布式解算,因此對數據鏈通信移動和可靠性要求很高。基于以上需求,采用雙數據鏈的通信模式(見圖1)。
數據鏈1采用基于Mesh組網技術開發的YL-800模塊,頻率為433 MHz,如圖5(a)所示。YL-800是基于Sx1278無線方案的Mesh自組網無線模塊,具有優異的網絡自愈性、穩定性、擴展性和魯棒性,同時該模塊功耗低、傳輸距離遠、移動性強等,能夠實現各平臺之間高速雙向通信,可滿足戶外試驗分布式組網通信的要求。由于MATLAB程序中的串口模塊通信速率受到限制,無法滿足地面站對無人機的高速實時控制要求,為了保證高速的傳輸速率,設計了指令發射機用來高速實時的向無人機集群發送控制指令。指令發射機是由STM32F4和自組網模塊構成,信號發射頻率設置為2 Hz。數據鏈2由CUAV Supter radio數傳搭建,如圖5(b)所示。該數傳使用工業級別USB轉TTL,頻率為915 MHz。該數傳和PIX自駕儀配合使用,其安全性、穩定性和可靠性已經得到業界的認可,并被廣泛應用于無人機通信上,因此本系統選擇該數傳來搭建數據鏈2。
2 領導-跟隨協同編隊控制算法
領導-跟隨協同編隊控制算法,是指在集群系統中設立領導者/虛擬領導者角色,通過領導者作用達到對集群系統控制的目的。設N個無人機組成的集群系統,由部分已知全局航跡信息的領導者和未知航跡信息的跟隨者組成。期望的全局航跡信息表示為
(1)
式中:pd、vd和ud分別為無人機的期望位置、速度和控制輸入。
假設航跡信息二階連續可微且集群中部分個體已知航跡信息,將集群中個體的動力學方程描述如下:
(2)
式中:pi∈Rn和vi∈Rn分別為第i個跟隨者的位置向量和速度向量;ui∈Rn為第i個無人機的控制輸入;hi為事件觸發變量,當無人機i能夠獲取全局信息,即為集群領導者時,hi=1,否則hi=0。在式(2)的基礎上采用文獻[17]設計的分布式控制協議:
(3)
第1項fpi為勢函數梯度項,可使集群在實現位置一致性的同時避免相撞。
(4)
式中:vE和vN分別表示向東和向北的速度分量,t≥0為時間。
由于文獻[17]已經給出了魯棒性、穩定性和收斂性等證明過程,本文不再描述。
實際中每個無人機的運動速度和加速度都應在合理的范圍內,本文將每個無人機的最大速度vmax設計為3 m/s,最大加速度amax設計為3 m/s2。由于GPS定位精度在2 m以內,因此無人機之間的編隊間距應大于4 m。試驗中其余相關參數取值如表1所示。
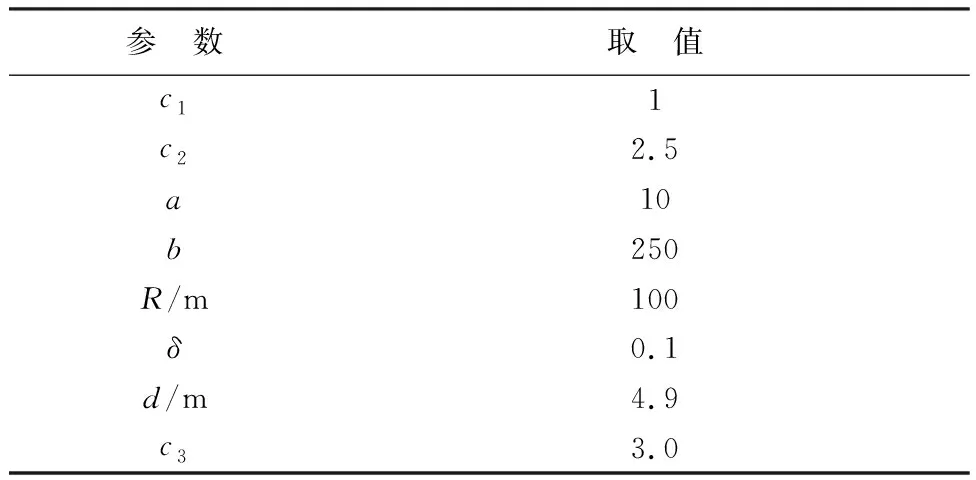
表1 試驗參數取值
3 試驗驗證
四旋翼無人機作為一種特殊構型的飛行器,具有結構簡單、成本低廉和低速巡航垂直起降等特殊的飛行性能,被認為是軍事和民用中某些場合的最理想飛行器。為驗證系統的有效性,本文搭建了四旋翼無人機作為無人機平臺,系統實物如圖6所示。
試驗采用3架四旋翼無人機,其中一架作為已知期望航跡信息的領導者,另外2架作為跟隨者,圖7為3架無人機的通信拓撲圖。試驗的目標是利用領導-跟隨協同編隊控制算法實現跟隨者對領導者速度、位置的跟蹤。由于該算法理論研究較成熟,地面仿真后,直接將算法移植到無人機的協同控制器上。
試驗流程如圖8所示,具體描述如下:
步驟1地面站2通過數據鏈2控制3架無人機起飛,高度在20 m處保持懸停。
步驟2地面站1通過數據鏈1將任務指令信息發送給無人機。指定一架為領導者,作圓周運動,其余2架為跟隨者。
步驟3無人機通過數據鏈1以2 Hz頻率廣播自身位置、速度信息,跟隨者在接收到其他個體的狀態信息后,由協同控制器以相同頻率計算出下一時刻的期望速度信息,并由執行層完成。
步驟4地面站2觀察無人機在飛行過程中傳感器參數是否在合理范圍內,判斷是否有不符合繼續演示條件的無人機,如果有則發送返回指令將無人機收回。
步驟5地面站1將返回的無人機狀態信息進行處理,判斷是否滿足設定的結束規則,如果不滿足則繼續飛行,滿足將無人機收回。
圖9為不同時刻試驗視頻截圖。試驗結束后,將PIX中的SD卡取出進行飛行數據分析,圖10為3架無人機飛行試驗數據曲線。
圖10(a)為跟隨者對領導者的位置跟蹤軌跡,圖中正方形表示飛行起點,圓圈表示飛行終點。通過圖10(a)可以看到,跟隨者對領導者實現了位置跟蹤。圖10(b)、(c)分別為西東方向,南北方向跟隨者對領導者的速度跟蹤曲線。通過速度跟蹤曲線發現,跟隨者總體實現了對領導者的速度跟蹤。通過圖10(d)跟隨者相對于領導者的位置差可以看出,3架無人機逐漸穩定在期望的相對距離4.9 m。
通過飛行試驗數據曲線可以認為跟隨者實現了對領導者的位置和速度跟蹤并形成期望的構型。但跟蹤時跟隨者速度存在振蕩以及跟蹤距離存在一定的誤差,造成上述誤差和速度振蕩的原因可分為2類:一是系統原因,二是算法原因。系統原因包括:系統傳感器本身存在誤差,如GPS定位精度等;同時會存在通信時延、數據丟包、傳感器更新延遲和數據處理時延的問題。算法原因包括:算法本身設計時并未考慮實際個體的動力學約束,如無人機的慣性等;同時勢函數本身容易產生振蕩,造成了個體在運動過程中速度振蕩更加明顯。針對上述問題,可以通過以下方式減小誤差:系統方面可以選用差分GPS定位的方式以提高系統定位精度并提高系統采樣周期;建立無人機個體模型時考慮無人機慣性、通信時延、以及一般環境噪聲等實際約束。
上述試驗結果表明設計的系統可滿足對編隊控制算法的演示驗證,同時也證明了算法中勢函數法本身存在振蕩、不易形成穩定構型等特點。
4 結 論
本文搭建了無人機集群編隊控制演示驗證系統,并對領導-跟隨協同編隊控制算法進行了驗證,運行結果表明:
1) 系統運行穩定可靠,可對不同的分布式編隊控制算法進行有效驗證。
2) 系統存在一定誤差,但在允許范圍之內。
3) 系統可以縮短算法開發周期,加快算法到實際的應用。
隨著任務的多種多樣,異構集群協同控制將會成為未來發展趨勢。同時,通信環境會異常復雜,感知約束也會隨環境的復雜而增大,這就需要開展在復雜通信環境下的強魯棒、高精度無人機集群編隊控制的試驗研究,這對試驗系統提出了更高的要求。因此,下一步工作將是進一步提高系統的定位精度和可靠性,并利用搭建的系統對不同環境約束下異構無人機集群編隊控制技術進行試驗驗證研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
