基于動磁測量與磁偶極子模型的魚雷近場定位技術
2018-09-03 09:04:26許政,李偉,秦楠,馬琪
水下無人系統(tǒng)學報 2018年4期
許 政, 李 偉, 秦 楠, 馬 琪
?
基于動磁測量與磁偶極子模型的魚雷近場定位技術
許 政, 李 偉, 秦 楠, 馬 琪
(海軍潛艇學院, 山東 青島, 266100)
為了豐富魚雷近場定位方法, 文中基于動磁測量技術(DMMT)與磁偶極子反演定位模型, 提出了一種新的魚雷近場定位技術, 并構建了相應測量系統(tǒng)。通過陸上試驗, 驗證了該技術可實現(xiàn)動磁源的近場準確定位, 且測量系統(tǒng)具有較高的精度和穩(wěn)定性。該技術可為魚雷靶場建設中的末彈道與脫靶量測量、過靶相對態(tài)勢判斷等研究提供參考。
魚雷; 磁偶極子; 動磁測量; 近場定位
0 引言
近年來各國海軍在水中兵器領域有了新的發(fā)展, 高命中精度魚雷及大航程巡航魚雷等水中兵器得到迅速發(fā)展, 對潛艇及水面艦艇的航行安全造成了新的威脅。因此, 魚雷裝備需向大航程、遠射距、強自適應性與高命中精度方向發(fā)展。一般情況下, 判斷子彈和導彈等空中飛行目標是否命中靶標, 可以利用光學手段、多普勒效應儀來測量脫靶量[1-3], 分析其末彈道。由于針對魚雷末彈道及脫靶量的現(xiàn)有測量方法仍有不足, 這就給新武器的研發(fā)帶來困難。
目前魚雷主要通過水聲手段定位, 具體方法有超短基線測量系統(tǒng)、短基線測量系統(tǒng)和長基線測量系統(tǒng), 不同態(tài)勢下利用不同的測量系統(tǒng)可以達到比較高的精度[4-6]。這些系統(tǒng)對于水下目標的探測更多的被用于目標航行的前、中段, 屬于遠場定位方法。在近場定位情況下, 例如在魚雷射擊訓練中, 判斷魚雷是否過靶, 以及過靶末彈道軌跡等信息的獲取, 水聲測量系統(tǒng)很難滿足其要求。這是因為靶標附近聲場環(huán)境復雜, 噪音與混響嚴重, 對水聲定位精度造成強烈干擾。除此之外, 水聲定位系統(tǒng)建設成本昂貴, 維護與保養(yǎng)也不甚方便。
水下目標潛艇、魚雷、無人水下航行器(un- manned undersea vehicle, UUV)等都有固有磁場, 即使航行前被消磁, 隨著航行時間的增加, 也會被地磁場磁化, 這為水下目標的探測、近場定位、軌跡測定及與平臺之間的態(tài)勢判斷提供了新的思路。文中提出了一種新的魚雷近場定位技術, 并構建了相應測量系統(tǒng)。魚雷水下輻射磁場較近, 這為魚雷近場高精度定位提供了基礎。因為只有魚雷輻射場進入磁測陣列才可被檢測到, 避免誤檢測; 同時, 無需安裝收發(fā)器、換能器與接收器, 利用魚雷自身磁場即可實現(xiàn)被動測量, 降低了系統(tǒng)構建的成本, 便于維護與升級。利用濾波與特定頻率響應等方法可以將魚雷磁場從環(huán)境磁場中分離出來, 配合電磁干擾抑制與電磁兼容方法, 為動磁源定位提供了保障。文中方法豐富了水下近場定位領域的研究, 并與水聲定位系統(tǒng)優(yōu)勢互補, 在某些水聲方法不能滿足測量要求的環(huán)境下可發(fā)揮重要作用, 為魚雷靶場建設中的末彈道與脫靶量測量、過靶相對態(tài)勢判斷等研究提供參考。
1 磁偶極子定位模型
由于接收到的目標磁場具有固定的頻率, 可以很好地與周圍的環(huán)境磁場干擾區(qū)分, 濾波和降噪后, 可大幅度降低環(huán)境干擾, 使目標磁場信號更為凸顯。首先采用帶通濾波提取出目標的交變磁場信息, 然后運用同頻同相的線性解調方法將交變磁場信息轉換為類似于靜態(tài)磁場的幅度變化曲線, 再采用磁偶極子模型反演出目標的位置信息和運動狀態(tài)[7-8]。





若令
則磁偶極矩0產生的磁場強度可以表示為
記為
目標的磁定位問題就是求解下面非線性無約束方程組的最優(yōu)化問題
2 魚雷近場定位技術與測量系統(tǒng)
如式(7)所示, 要實現(xiàn)魚雷的近場定位, 必須獲得磁偶極子輻射場內動磁源三分量磁場強度向量, 即0, 再以式(6)提出的無約束非線性優(yōu)化方程為依據(jù)可實現(xiàn)動磁源定位。
獲取多點三分量磁場強度向量0需構建相應的磁測系統(tǒng), 磁測系統(tǒng)原理示意圖見圖2, 若陣列附近水下有異常磁場信號, 這些信號被傳感器采集, 數(shù)據(jù)采集卡內置輻射磁場氣液跨介質傳播時磁導率的轉換過程限于篇幅不展開, 再通過濾波與降噪, 對磁場數(shù)據(jù)進行預處理, 由控制器局域網絡(controller area network, CAN)卡收集數(shù)據(jù)與計算機通信, 計算機通過CANTest測試軟件選擇通道并控制數(shù)據(jù)的讀入與處理, 以實現(xiàn)魚雷的近場定位與末彈道測量。

圖2 磁測系統(tǒng)原理示意圖
2.1 測量系統(tǒng)硬件設計
系統(tǒng)所需的硬件包括三分量感應式磁傳感器; 數(shù)據(jù)采集卡; CAN卡; 穩(wěn)壓電源, 電能來自于220 V, 50 Hz的工頻交流電, 用5 V, 1 A的穩(wěn)壓直流電源實現(xiàn)電能轉換, 為磁傳感器供電。CAN總線有2個通道: 0通道和1通道, 分別與并行的兩路數(shù)據(jù)采集模塊、磁傳感器相連接, 進行數(shù)據(jù)的采集和傳輸; 另一端通過USB-CAN接口與電腦連接, 通過CAN通信方式通信, CANTest軟件對數(shù)據(jù)進行接收、存儲、顯示和處理。
2.2 測量系統(tǒng)軟件開發(fā)
測量系統(tǒng)用到的軟件是CANtest軟件, 是基于Labwindows /CVI 平臺開發(fā)的信號測試軟件。CVI(C programming language virtual instrument)平臺把C語言平臺與數(shù)據(jù)采集分析和顯示的測控專業(yè)工具有機的結合起來, 為檢測系統(tǒng)、自動測試環(huán)境、數(shù)據(jù)采集系統(tǒng)、過程監(jiān)控系統(tǒng)等應用軟件的開發(fā)提供了一個理想的開發(fā)環(huán)境[10]。
測試軟件可以實現(xiàn)如下功能: 選擇數(shù)據(jù)輸入通道, 向CAN發(fā)送指令控制數(shù)據(jù)流的流入、寄存與存儲; 利用指示燈的強弱指示各個傳感器磁強; 將不同傳感器采集到的磁強曲線繪制出來, 及時地觀察磁場波形的時域變化。
2.3 基于動磁測量的魚雷近場定位方法
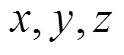
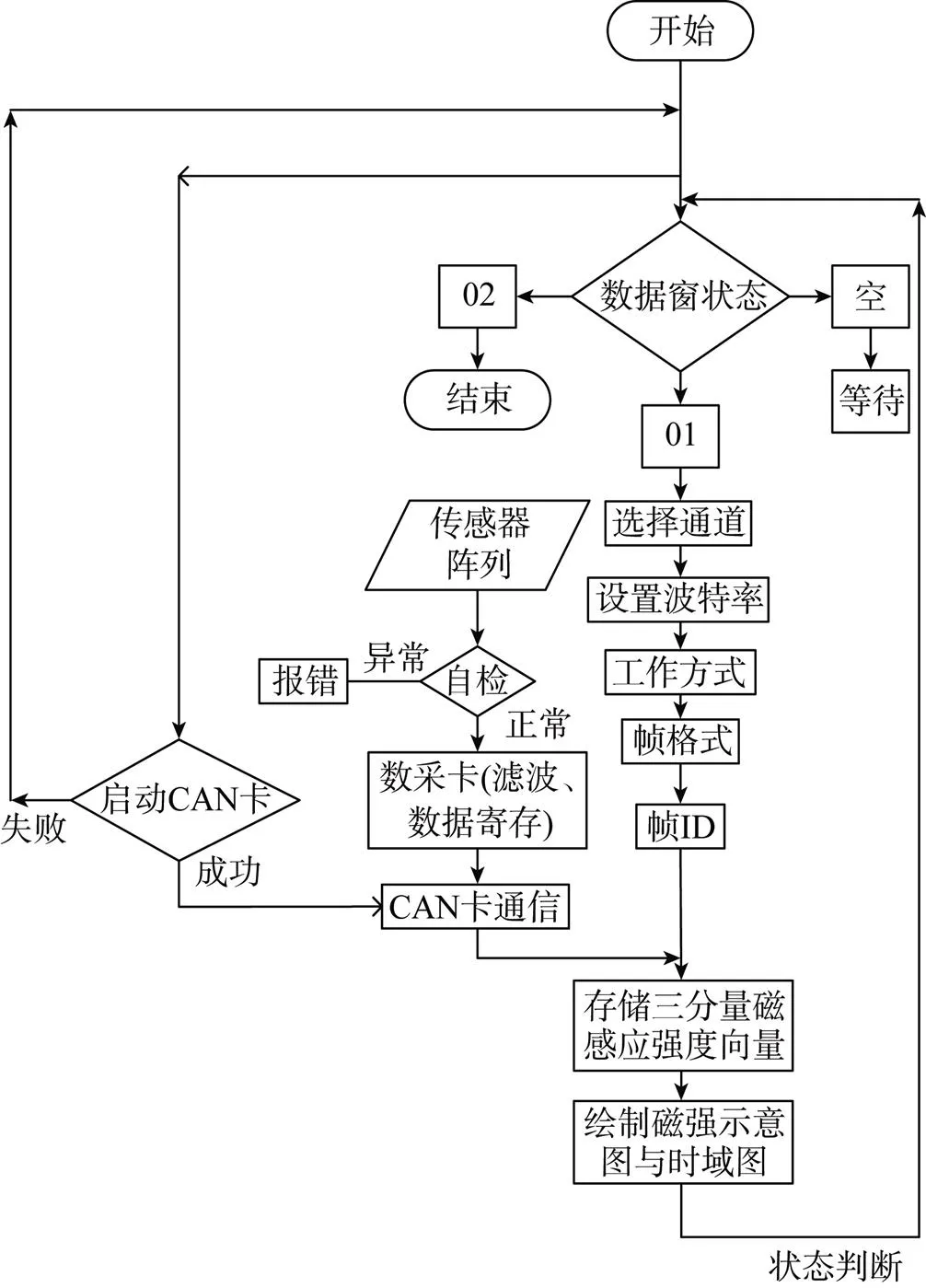
圖3 CANTest程序流程圖
3 動磁測量系統(tǒng)性能驗證試驗
選擇試驗環(huán)境時, 由于目前湖海試驗條件不足, 故采用陸上試驗的方式測試系統(tǒng)性能, 這也是水下系統(tǒng)常用的測試方法之一, 只要滿足相應條件, 同樣可獲得有價值的信息。試驗時, 應盡量減弱周圍電氣設備工頻50 Hz及倍頻程的電磁干擾; 動磁測量過程中, 為盡量模擬魚雷水下運動狀態(tài), 應使動磁源平穩(wěn)運動, 選擇平坦、寬闊的地面測試, 避免振動造成的電磁干擾, 可對載體作相應的減振處理。
3.1 動磁測量方案
用磁性輻射棒作為動磁源, 波形發(fā)生器為其提供信號, 可產生不同類型的波形, 分別用于驗證系統(tǒng)的頻率響應、濾波、降噪與整波、定位準確性與系統(tǒng)穩(wěn)定性等性能。建立如圖4所示的坐標系, 試驗方法如下。
圖4 磁測陣列布置示意圖
1) 布置運動磁場測量設備。采用12組傳感器和數(shù)采模塊按照圖4所示的陣列布置, 調試系統(tǒng)確定已啟動CAN卡, 設置相應參數(shù), 保證各傳感器工作正常。
2) 用控制變量的方法, 波形發(fā)生器產生不同頻率的信號, 測試系統(tǒng)對不同頻率的響應, 以驗證最佳頻率響應頻段。該頻段是系統(tǒng)事先設定的, 應為UUV產生的磁場頻段。輻射功率一定時, 探究測試距離與磁強的關系, 有助于獲得系統(tǒng)測量精度、測量范圍等指標, 觀察系統(tǒng)降噪與整波前后波形變化, 驗證整波效果。
3)用減振處理過的小車作為磁源載體, 接通信號發(fā)生器, 同時小車沿圖4箭頭指示的路徑運動, 計算機對采集到的數(shù)據(jù)進行存儲、顯示及分析。
4) 動磁源抵達終止位置, 向數(shù)據(jù)窗口輸入數(shù)字02, 指示其停止采集。關閉波形觸發(fā)系統(tǒng), 整理采集的數(shù)據(jù), 一次航行器運動信號采集過程結束。
3.2 動磁源輻射頻率對磁感應強度的影響
圖5為動磁源輻射頻率對磁感應強度的影響。首先進行系統(tǒng)基礎性能測試, 采用正弦波, 幅值為16 V, 頻率450 Hz, 占空比為50%, 偏置為0, 功放倍數(shù)為2倍。測得不同輻射頻率對應的磁感應強度不同。圖5中, 取數(shù)個時刻點, 磁感應強度對頻率的響應如表1所示, 在=1.7 s之前為背景噪音,=1.7 s開始測試。
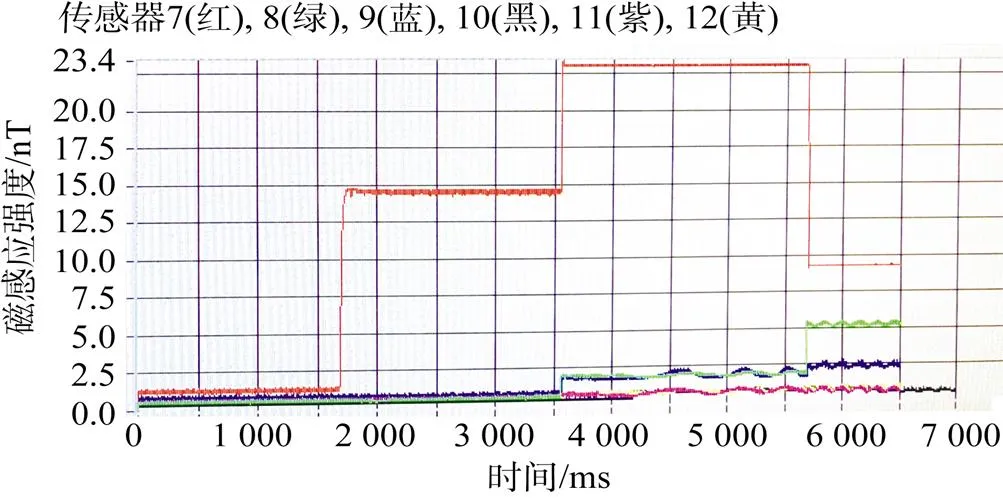
圖5 輻射頻率對磁感應強度的影響

表1 不同時刻磁感應強度對頻率的響應
據(jù)此可得同一功率下, 在頻率取某個特定值時, 磁感應強度可以達到最大值, 試驗后得到=450 Hz時, 磁強測得最大值為25.4 nT。
為了將魚雷的磁信號與周圍的干擾信號區(qū)分開, 在信號預處理時, 頻率低于400 Hz與高于500 Hz的信號會很快被過濾。這有利于在眾多干擾信號中, 迅速尋的到目標磁信號。
3.3 磁感應強度對測試距離的響應
采用正弦波, 電壓20 V,=450 Hz, 其他條件與之前相同, 用4號傳感器測試測試磁感應強度與距離的關系。如圖6所示, 取數(shù)個時刻點, 磁感應強度對測試距離的響應如表2所示。
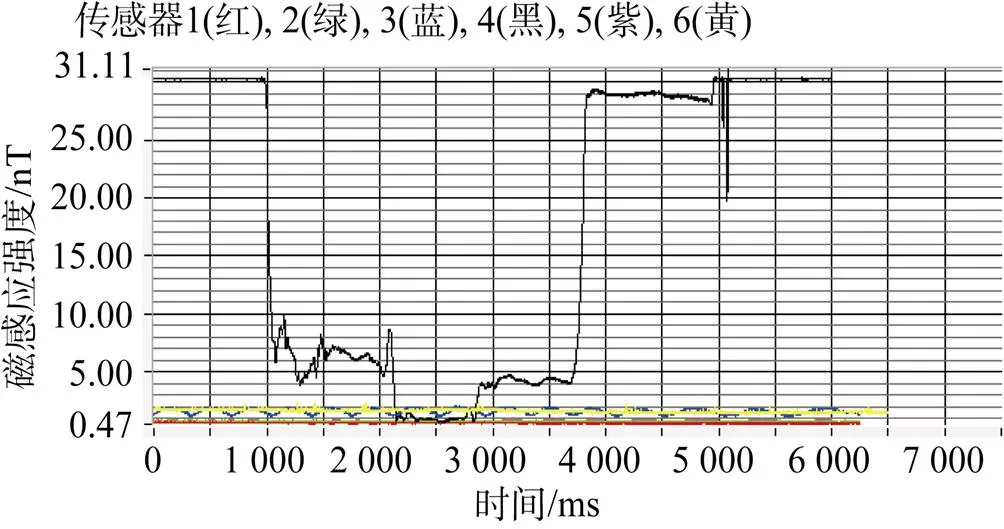
圖6 測試距離對磁感應強度的影響
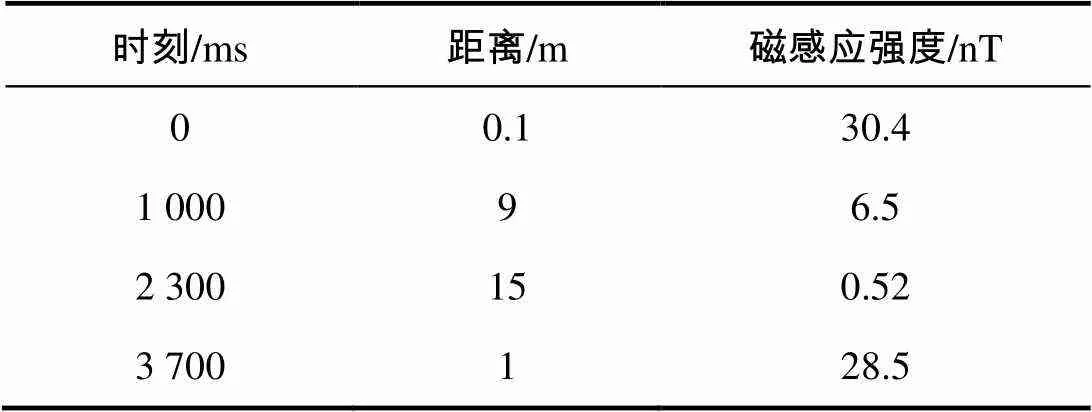
表2 不同時刻磁感應強度對測試距離的響應
由式(2)所示, 磁強與輻射源磁矩成正比, 與距離的三次方成反比。無電磁干擾環(huán)境下, 背景輻射噪聲幅值約為0.2~0.5 nT, 由式(7)和單個傳感器測到的0對動磁源進行定位時發(fā)現(xiàn), 不易將低于0.5 nT的信號與背景噪聲區(qū)分, 信號預處理時會被過濾; 單軸信號低于1.2 nT時, 定位后距離差異低于0.1 m, 為簡便運算, 將其視為同一個定位點。因此, 若設置1.2 nT為該系統(tǒng)的測量分辨率, 再依據(jù)圖6與表2獲得的測試數(shù)據(jù), 可得要使該系統(tǒng)的定位精度達0.1 m, 系統(tǒng)的定位距離應保持在10~12 m以內。
3.4 小波降噪
加帶通濾波模塊后, 雖可以迅速尋到目標磁信號, 但測得的信號噪音干擾較大, 波形不平整, 不便于讀數(shù)與觀察, 如圖7所示。
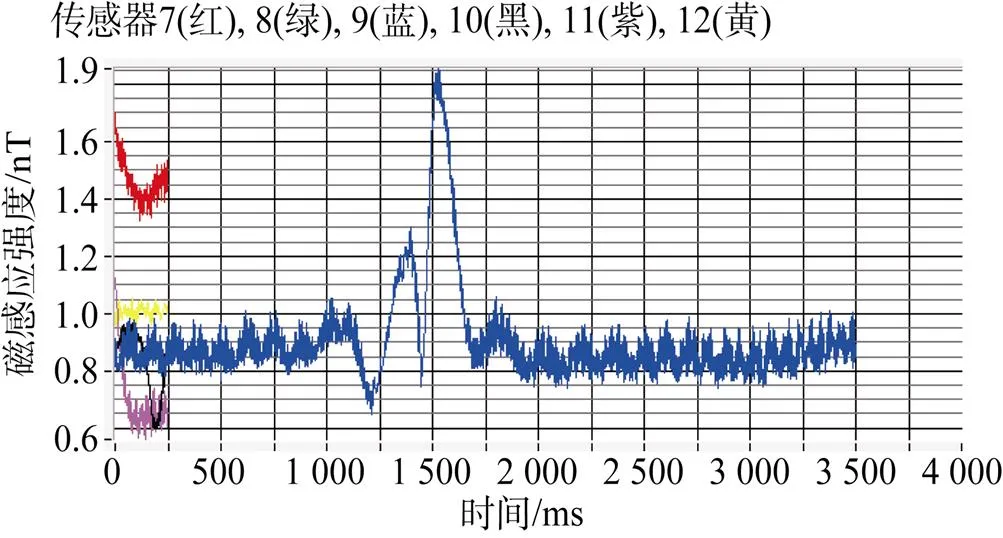
圖7 降噪之前磁感應強度波形
擬采用小波降噪的方法對圖像進行處理。其步驟如下。


5) 由以上各式求出新閾值
對各層各高頻系數(shù)進行小波軟閾值處理得到新的小波系數(shù)
在數(shù)采卡內添加降噪模塊后, 其波形顯示如圖8所示, 可以獲得較為理想的效果。圖中曲線出現(xiàn)2個峰, 是動磁源N極與S極分別經過傳感器附近的緣故。
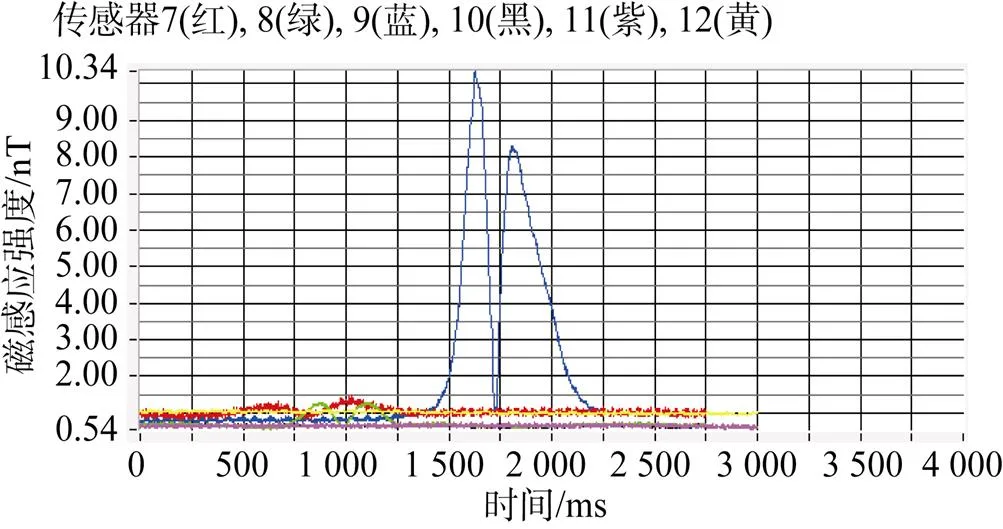
圖8 降噪之后的磁感應強度波形
3.5 動磁源定位試驗
采用正弦波, 幅值為20 V, 頻率450 Hz, 占空比為50%, 偏置為0, 功放放大倍數(shù)為2倍。
動磁源按如圖4所示的路徑運動, 緩速(約為3 m/s)均勻通過磁測陣列采集的數(shù)據(jù)如圖9所示, 快速(約為6 m/s)均勻通過磁測陣列采集的數(shù)據(jù)如圖10所示。
這樣設置可檢驗系統(tǒng)對不同速度動磁源的響應, 測定系統(tǒng)靈敏性、穩(wěn)定性、測量精度等信息。磁感應強度峰值最高可以達到30.49~30.73 nT, 曲線的爬升和回落比較迅速, 可判斷磁場測量具有較高的靈敏度。
在圖11和圖12中, 為方便與實際位置比較, 選取0~14這15個時刻點的三分量磁強值作為輸入, 光滑實線是算法定位后輻射源運動軌跡, 是15個定位點連起的折線; 而在0~14時刻, 實際測量位置點用“*”標注, 光滑的虛線是輻射源實測點連起的折線。定位誤差結果由表3和表4所示。圖11和圖12中的坐標滿足圖4所建的坐標系。
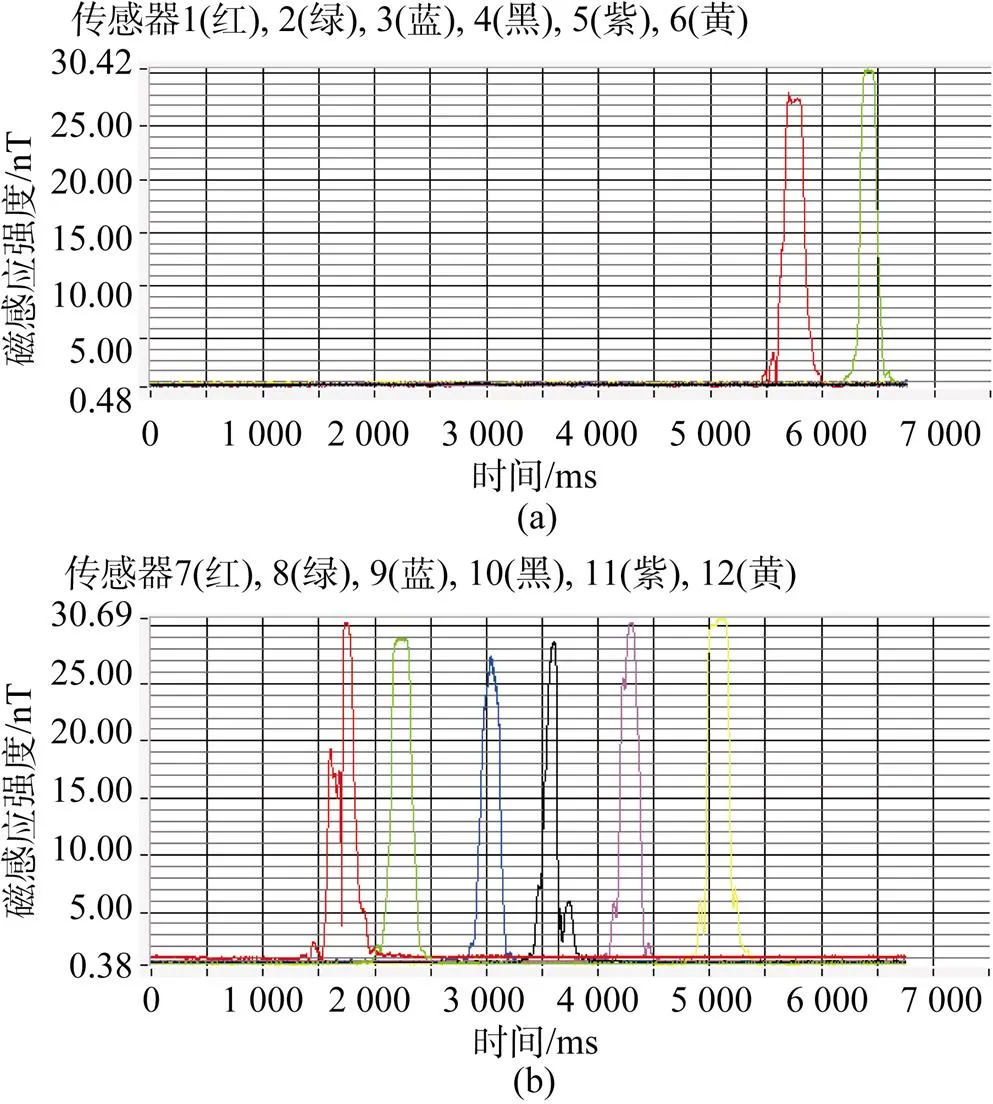
圖9 動磁源緩速均勻通過磁測陣列磁感應強度波形圖
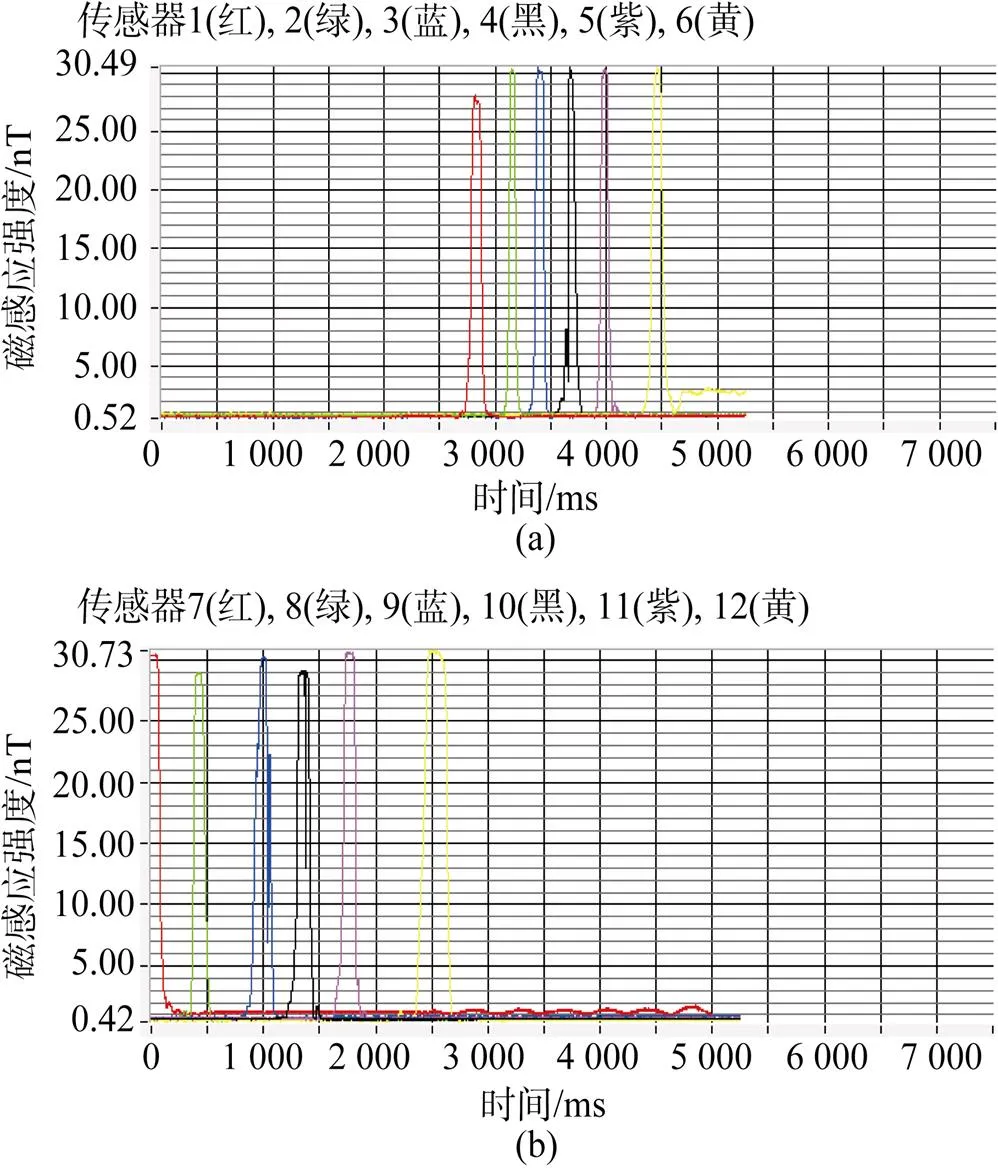
圖10 動磁源快速均勻通過磁測陣列磁感應強度波形圖
緩速通過時, 最小的定位誤差為0.38%, 最大定位誤差為2.07%, 平均誤差為0.94%。快速通過時,最小的定位誤差0.53%,最大的定位誤差為2.32%, 平均誤差為1.13%。所有定位誤差都低于2.5%, 故該系統(tǒng)具有較高的定位精度。緩速通過的平均定位誤差要低于快速通過的平均定位誤差, 可得隨著動磁源運動速度的增加, 定位精度會略有所降低。這主要是因為隨著速度增加, 磁源載體的振動增加, 產生了更多的振動磁場干擾。魚雷等目標在水下航行時, 這種情況會有所減緩, 這是因為魚雷姿態(tài)控制比較好, 速度雖高, 卻不會產生更多振動磁噪音, 故該系統(tǒng)同樣適用于近場定位魚雷。
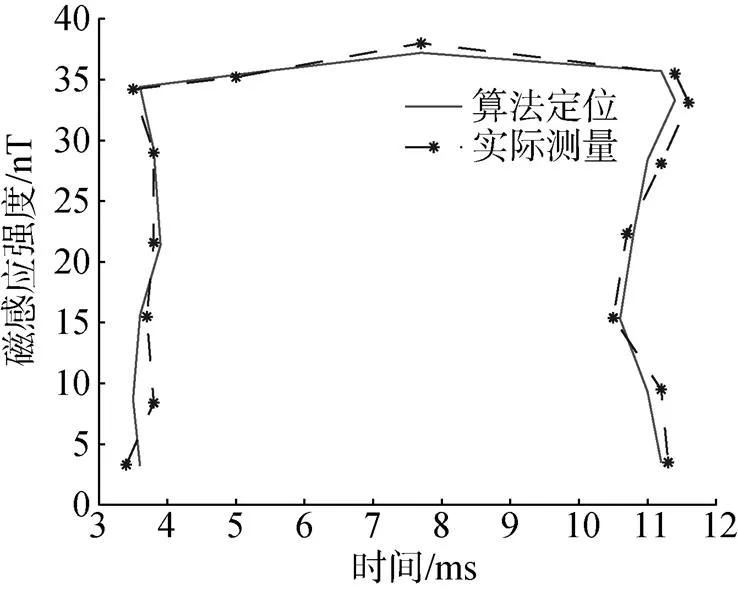
圖11 磁源緩速通過算法定位與實際測量軌跡比較
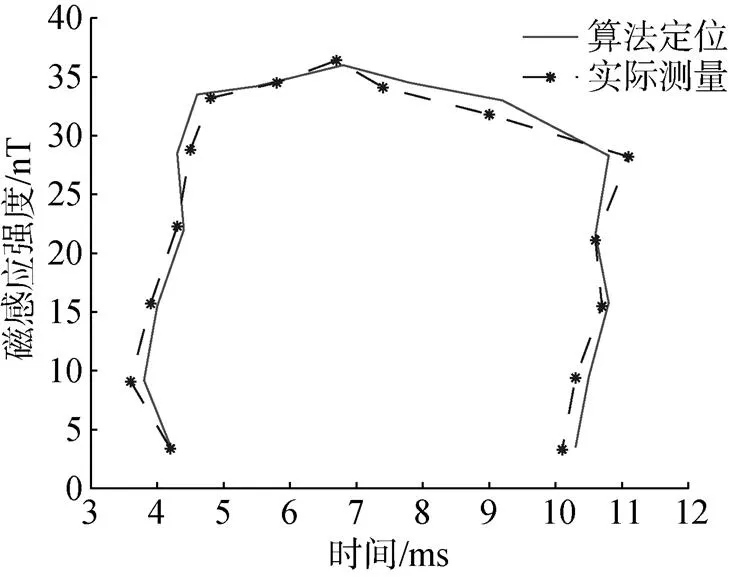
圖12 磁源快速通過算法定位與實際測量軌跡比較
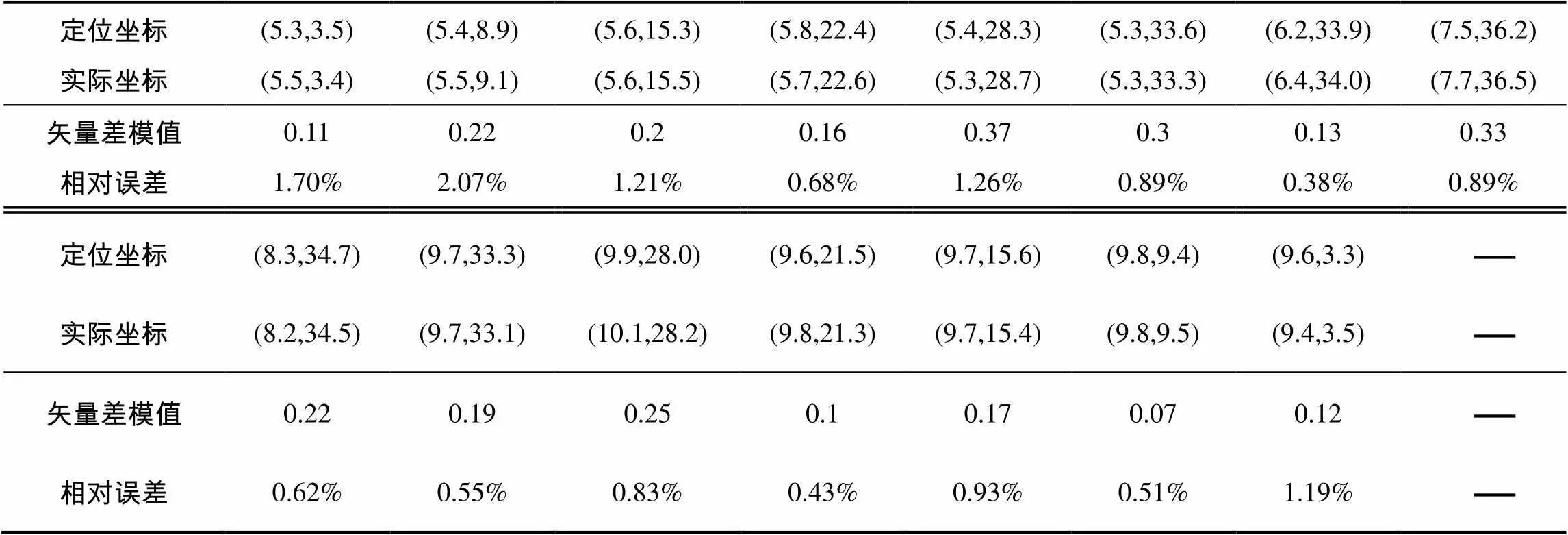
表3 輻射源緩速通過磁測陣列的相對定位誤差
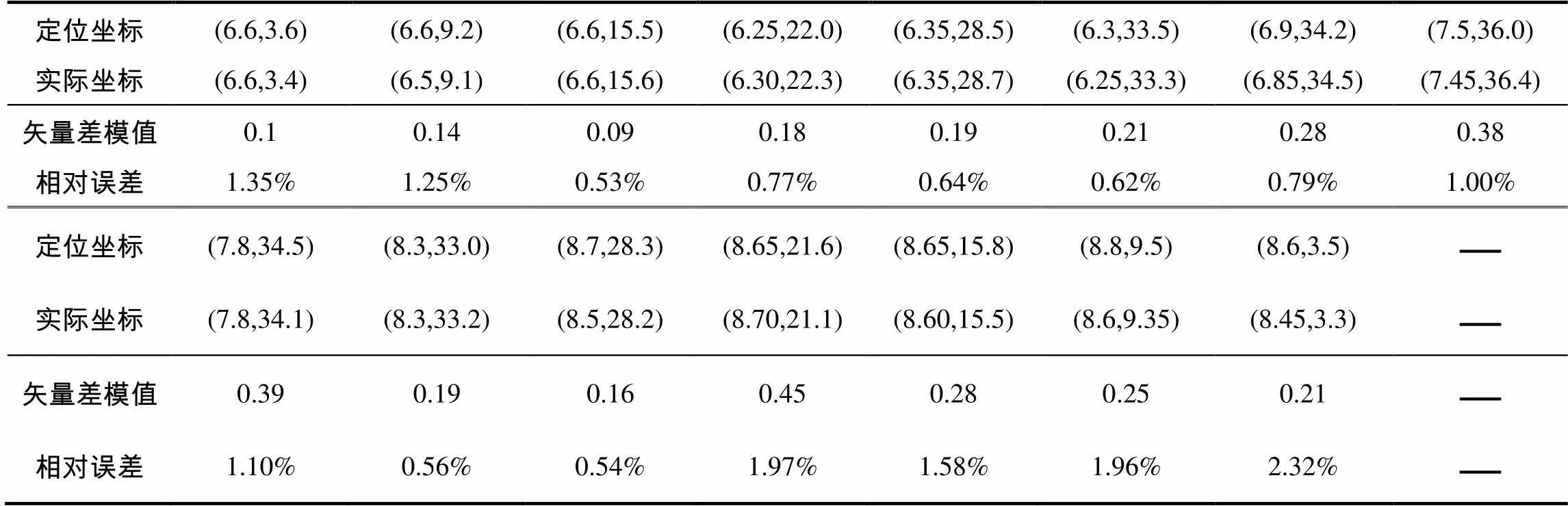
表4 輻射源快速通過磁測陣列的相對定位誤差
4 結束語

[1] 房秉毅, 王劍, 吳嗣亮. 基于距離跟蹤的矢量脫靶量測量方法[J]. 彈道學報, 2007, 19(6): 29-33. Fang Bing-yi, Wang Gang, Wu Si-liang. Vector Miss Distance Measurement Based on Range-only Tracking[J]. Journal of Ballistics, 2007, 19(6): 29-33.
[2] 劉松海, 洗觀福, 孫向前. 魚雷攻潛末彈道測量中的抗多途專家系統(tǒng)[J]. 艦船科學技術, 2012, 34(3): 111-114.Liu Song-hai, Xi Guan-fu, Sun Xiang-qian. Anti-multi- path Expert System for Terminal Trajectory Measurement of Torpedo[J]. Ship Science and Technology, 2012, 34(3): 111-114.
[3] 李志宇, 吳嗣亮, 魏國華. 脫靶量測量中體目標效應的分析[J]. 彈道學報, 2007, 19(9): 57-61.Li Zhi-yu, Wu Si-long, Wei Guo-hua. Analysis of the Effect of Body Target on Miss Distance Measurement[J]. Journal of Ballistics, 2007, 19(9): 57- 61.
[4] 田春和, 秦建. 基于長基線水聲定位系統(tǒng)水下定位技術初步應用研究[J]. 水道港口, 2015, 36(6): 268-271.Tian Chuan-he, Qin Jian. Applied Research of Long Baseline Acoustic Positioning System Based on Underwater Positioning Technique[J]. Journal of Waterway and Har- bor, 2015, 36(6): 268-271.
[5] 高國青, 葉湘濱, 喬純捷. 水下聲定位系統(tǒng)原理與誤差分析[J]. 四川兵工學報, 2016, 31(6): 95-98.
[6] 吳永亭, 周興華, 楊龍. 水下聲學定位系統(tǒng)及其應用[J]. 海洋測繪, 2003, 23(7): 18-21.Wu Yong-ting, Zhou Xing-hua, Yang Long. Underwater Acoustic Positioning System and its Application[J]. Hydrographic Surveying and Charting, 2003, 23(7): 18-21.
[7] 吳旭東, 侯文生, 鄭小林. 磁偶極子的定位模型及實驗驗證[J]. 儀器儀表學報, 2008, 29(2): 326-329. Wu Xu-dong, Hou Wen-sheng, Zheng Xiao-lin. Discussion of Magnetic Dipole Model and Its Location Detecting Application[J]. Chinese Journal of Scientific Instrument, 2008, 29(2): 326-329.
[8] 唐露新, 張淏. 交變磁場測量的研究進展[J]. 測控技術, 2013, 32(4): 1-4.Tang Lu-xin, Zhang Hao. Research Progress of Alternating Magnetic Field Measurement[J]. Measurement & Co- ntrol Technology, 2013, 32(4): 1-4.
[9] 任來平, 趙俊生, 侯世喜. 磁偶極子磁場空間分布模式[J]. 海洋測繪, 2002, 22 (3): 18-21. Ren Lai-ping, Zhao Jun-sheng, Hou Shi-xi. The Distribu- tion Model of Magnetic Dipole in Magnetic Field[J]. Hydrographic Surveying and Charting, 2002, 22(3): 18-21.
[10] 王坷, 賀向東, 齊鑫. LabWindows/CVI在導引頭地面測控設備中的應用[J]. 計算機測量與控制, 2017, 25(1): 91-93. Wang Ke, He Xiang-dong, Qi Xin. Applicaion of Lab Wi- ndows/CVI in Ground Measurement and Control Equip- ment of Seeker[J]. Computer Measurement & Control, 2017, 25(1): 91-93.
(責任編輯: 楊力軍)
Torpedo Near-Field Positioning Technique Based on Dynamic Magnetic Measurement and Magnetic Dipole Inversion Model
XU Zheng, LI Wei, QIN Nan, MA Qi
(Naval Submarine Academy, Qingdao 266100, China)
To enrich torpedo near-field positioning method, a new torpedo near-field positioning technique is proposed based on dynamic magnetic measurement technique(DMMT) and magnetic dipole inversion positioning model, and corresponding measurement system is constructed. The results of onshore test show that this technique can realize accurate location of the moving magnetic source in near field, and the measurement system has high accuracy and stability. This technique may provide a reference for the research of end-trajectory and miss distance measurement in torpedo shooting range construction and relative situation judgment of pass target.
torpedo; magnetic dipole; dynamic magnetic measurement(DMMT); near-field positioning
許政, 李偉, 秦楠, 等. 基于動磁測量與磁偶極子模型的魚雷近場定位技術[J]. 水下無人系統(tǒng)學報, 2018, 26(4): 316-323.
TJ630.6; TB22
A
2096-3920(2018)04-0316-08
10.11993/j.issn.2096-3920.2018.04.007
2018-03-30;
2018-05-21.
國防科技預先研究課題資助(3020605030103).
許 政(1993-), 男, 在讀碩士, 研究方向為潛用武器作戰(zhàn)使用及保障.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21