鐵路汽車裝載激光雷達技術應用
2018-08-29 02:29:26李可佳馬欣然
鐵道貨運 2018年8期
胡 淦,李可佳,安 迪,李 涵,馬欣然
(中國鐵道科學研究院集團有限公司 運輸及經濟研究所,北京 100081)
1 概述
隨著我國汽車產業的高速發展,鐵路汽車裝載技術在運輸過程中越來越重要。然而,由于鐵路汽車裝載過程中仍然采用人工指揮或導引設備進行引導的手段,司機視線可能會存在盲區,特別是在裝載大型車輛時,對準和調整汽車位置的引導方式難度高,存在時間長、效率低、安全隱患大等問題,我國目前也還沒有成熟的輔助系統應用于汽車的鐵路裝載作業。
激光雷達是激光、大氣光學、雷達、光機電一體化和電算等技術相結合的產物,以激光為光源,通過探測激光與被探測物之間相互作用的光波信號來遙感測量[1-2],其本質是高速旋轉的激光測距儀由電機帶動激光測距儀以一定頻率旋轉,使得激光雷達能夠獲取其旋轉平面內多個離散點的距離數據,從而獲得自身位置與周圍物體的相對位置信息[3-4]。無論白天黑夜,激光雷達均能夠探測遠距離的目標,不受霧、云和雨的阻擋,具有全天候、全天時的特點,并有一定的穿透能力[5]。激光雷達的有效掃描區域為270°,1周包含1 080束激光,角度分辨率為0.25°。在實際應用中,激光雷達的掃描盲區為垂直上方90°區域,掃描區域沿垂直地面方向軸對稱,激光雷達的掃描區域如圖1所示。
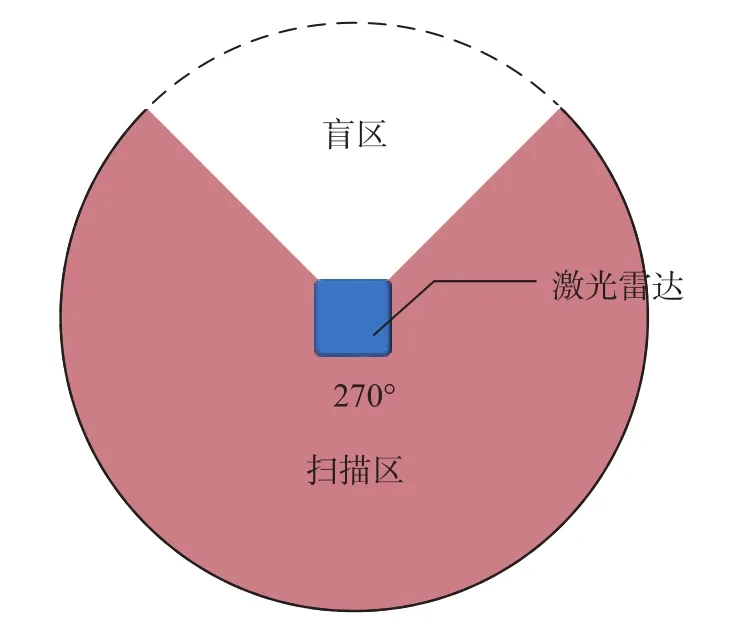
圖1 激光雷達的掃描區域Fig.1 Laser radar scanning area
激光雷達作為一種精度高、反應靈敏、穩定性強的測距傳感器,能夠為鐵路汽車裝載導引設備提供實時、準確的車輛位置信息,輔助司機完成鐵路汽車裝載作業。因此,提出一種基于激光雷達技術的車輛輔助引導系統及激光雷達檢測算法,通過該算法可以對激光雷達測距數據進行處理,獲取相應待測邊界距離值,以適用于鐵路汽車裝載中的定位導航,輔助司機實施裝載,提高鐵路裝載效率和安全性。
2 車輛輔助引導系統構成
鐵路上采用平車作為汽車的運輸工具,以渡板作為輔助工具,裝車人員駕駛汽車通過渡板,直接停在平車上[6-7]。在實際裝車過程中,需要多人在旁邊指揮、測量和反復調整,裝載效率低。遇到惡劣天氣或者夜間裝車時,裝車人員短時間內無法對準位置,嚴重影響汽車裝載及運輸效率[8-9]。
車輛輔助引導系統將激光雷達技術應用于鐵路汽車裝載,并將激光雷達垂直固定在被裝載車輛的車頭中心位置,其轉動平面與平車平面垂直相交。借助激光雷達的測量數據,可以實時獲取激光雷達相對平車的位置和偏離信息,配合攝像頭圖像為裝車人員提供準確全面的車輛位置和偏差信息,從而代替人力輔助裝車人員完成汽車裝載作業,車輛輔助引導系統工作示意圖如圖2所示。
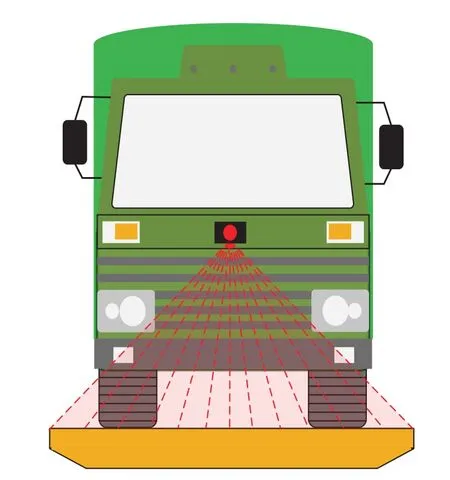
圖2 車輛輔助引導系統工作示意圖Fig.2 Working diagram of guide system
車輛輔助引導系統包括激光雷達測距傳感器、視頻監控器、無線模塊、電源、電器箱和平板電腦。激光雷達測距傳感器、視頻監控器、無線模塊和電源均安裝在電器箱內,電器箱固定在車輛前端或尾部中心處,其轉動平面與平車地板垂直相交。電器箱尺寸小、重量輕、方便攜帶、隨用隨裝。平板電腦放置于汽車內,為司機提供車輛和平車的相對位置信息,并發出操作提醒。車輛輔助引導系統的激光雷達測距傳感器用于測量車輛與平車邊界之間的距離;無線模塊將激光雷達采集的數據傳輸到數據處理模塊;視頻監控器為司機提供車輛前方的實時圖像;電源給激光雷達測距傳感器、視頻監控器、無線模塊供電。在該系統中,激光雷達測量數據在經過微機處理后,可以得到偏移量,并通過無線的方式傳輸到車內的液晶顯示屏上,為汽車駕駛員提供偏移提示,輔助司機完成汽車裝載作業。
3 激光雷達檢測算法
為獲得激光雷達位置偏離信息,需要確定激光雷達高度H、激光雷達到平車兩邊距離L1和L2,以及偏角β。平車邊界存在跳變測量信息,通過激光雷達檢測算法可以識別跳變測量信息,得到平車兩邊邊界處的測量點,相應測量點的距離數據即為激光雷達距離平車兩邊界的直線距離。激光雷達測量斷面如圖3所示。
(1)確定H。激光雷達的掃描分辨率為0.25°,每掃描1周會發出1 080束激光,得到1 080個數據點。掃描平車截面時,根據激光雷達不同高度,約有400 ~ 600束激光會落在平車上,這些激光的測量值即為激光雷達與平車相應位置的距離,返回數據的最小值即為激光雷達距離平車的最短距離H。
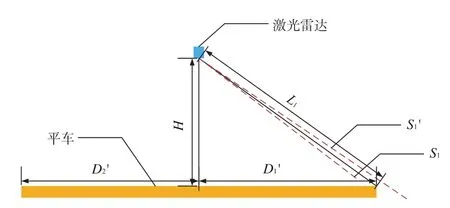
圖3 激光雷達測量斷面Fig.3 Laser radar measuring section
(2)確定L1,L2值。在車輛輔助引導系統的算法中,判定出平車邊界,即可確定L1,L2。S1和為相鄰2束激光,由激光雷達分辨率可知2束激光夾角為0.25°,其中S1打在平車上,超出了平車邊界。通過分析2束激光的返回值,可知S1到的測量數據是跳變的,因而可以判定平車邊界夾在2束激光之間。依據測量結果,將S1的測量值視為L1,同理可得L2。當激光雷達位于平車中心線上時L1=L2。已知L1,L2和H,即可根據勾股定理求得平車兩端距離,。
(3)測量偏角β。車輛偏轉會對測量結果產生較大影響,當偏轉角度為β時,實測偏離量為實際偏離量的倍,因而需要求出偏角β進行修正。偏角β示意圖如圖4所示。
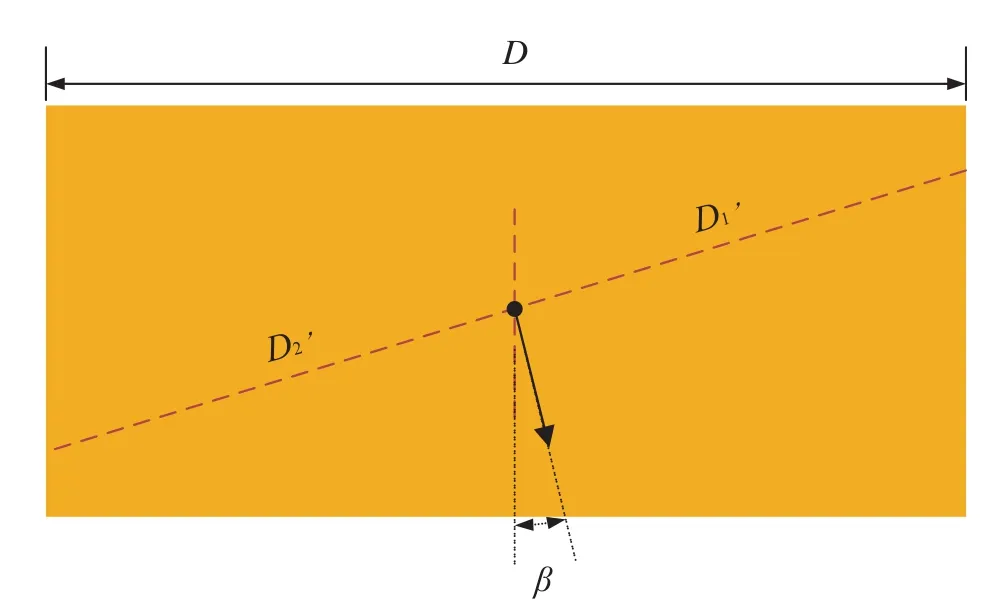
圖4 偏角β示意圖Fig.4 Angle beta diagram
平車寬度為D,箭頭起點為激光雷達所在位置,箭頭指向為車輛行駛方向。此時,車輛行駛方向偏離平車中心線β角度,計算公式為

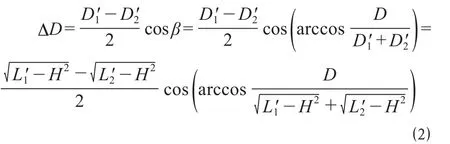
(4)計算偏離量。根據已知數據H,L1,L2,β,即可求得偏離量ΔD,計算公式為
綜上可知,偏離量求解流程如圖5所示。

圖5 偏離量求解流程Fig.5 Deviation calculation process
4 誤差矯正與實驗分析
偏離量ΔD為隨機誤差,其大小和正負都不確定,但在大量重復測量實驗中服從一定統計規律。誤差具有對稱性、單峰性、有界性和抵償性的特點,即理論上大小相等的正負誤差出現的概率相等,小誤差出現的概率大,大誤差出現的概率小,最大誤差有極限,并且隨著測量次數增加,誤差代數和趨于零。誤差不可避免,但消除小概率出現的大誤差對提高測量精度至關重要。
4.1 誤差矯正方法
基于誤差特征,選取以下4種方法對測量數據進行優化處理。
(1)平均數法。即不做篩選,整體取平均。由前文分析可知,數據誤差的類型主要是隨機誤差,隨機誤差具有對稱性,即在數據量足夠大時,絕對值相等的正負誤差概率相等,所有誤差的加和接近于零。因此,理論上經過平均數法處理后的誤差會大大減小。
(2)投票法。對每組數據分別去掉3個最大值和最小值后取平均,得到最終數據。投票法相當于在取平均數法的基礎上去掉異常數據。
(3)中位數法。該方法依據隨機誤差的對稱性,當數據量足夠大時,理論上中位數的誤差應趨于零,通過選取中位數的方法就可以有效避免誤差。
(4) 正態分布法。依據正態分布的性質,待處理數據中數值分布在 (μ-σ,μ+σ)中的概率為 65.26% ;數值分布在 (μ- 2σ,μ+ 2σ)中的概率為 95.44% ;數值分布在 (μ- 3σ,μ+ 3σ)中的概率為 99.74%。選取(μ-σ,μ+σ)內的數據進行平均處理,篩除區間外的數據,結果表明該方法可以剔除極值點,避免誤差。
4.2 實驗結果分析
實驗選取3個位置,分別運行平均數法、投票法、中位數法、正態分布法4種算法進行測定,其中3個位置分別為平車中心線、平車中心線左偏50 mm、平車中心線右偏100 mm。每組實驗選取200個數據進行分析,平車中心線偏左的數據為正值,偏右的數據為負值,得出測定平均值、誤差平均值和標準差的實驗結果比較如表1所示。
誤差平均值可以反映數據精度,標準差可以反映數據離散程度。由表1可知,運行不同算法時,各組誤差平均值、標準差均無明顯差距,誤差平均值基本在(-1.5 mm,3 mm)之間波動,即經過算法處理后,測量精確度可以達到毫米級別,基本滿足應用需求。
取3組實驗數據誤差平均值和標準差平均值,得到3組實驗取平均結果如表2所示。
由表2可知,正態分布法的平均誤差最大;中位數法的平均誤差最小,精確度最高,但其平均標準差最大,數據穩定性差;投票法的平均標準差最小,精度也較優。車輛輔助引導系統在戶外的實際應用中,會遇到更加復雜的情況,因而對數據穩定性的要求相對更高。因此,選取投票法作為車輛輔助引導系統的最終算法。
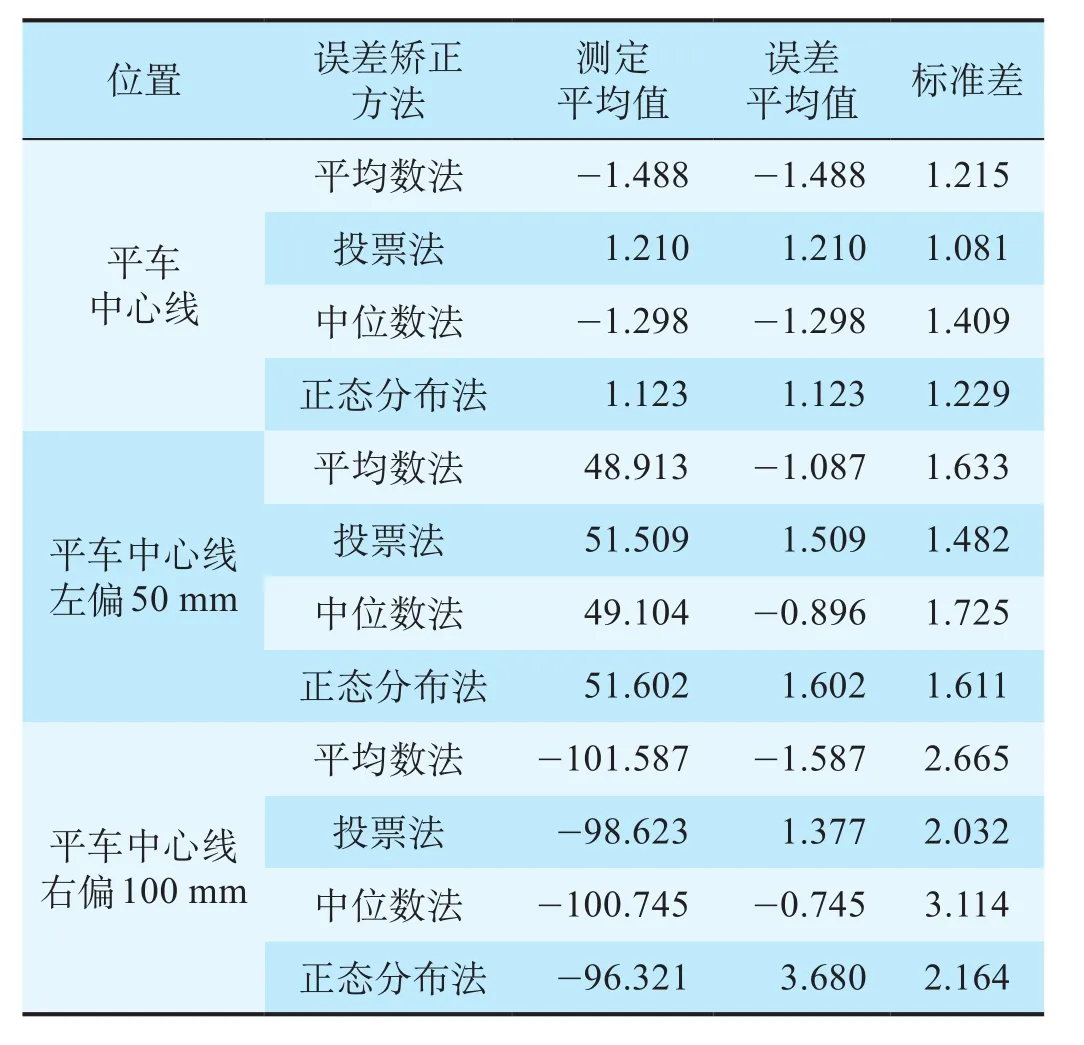
表1 實驗結果比較 mmTab.1 Comparison of experimental results
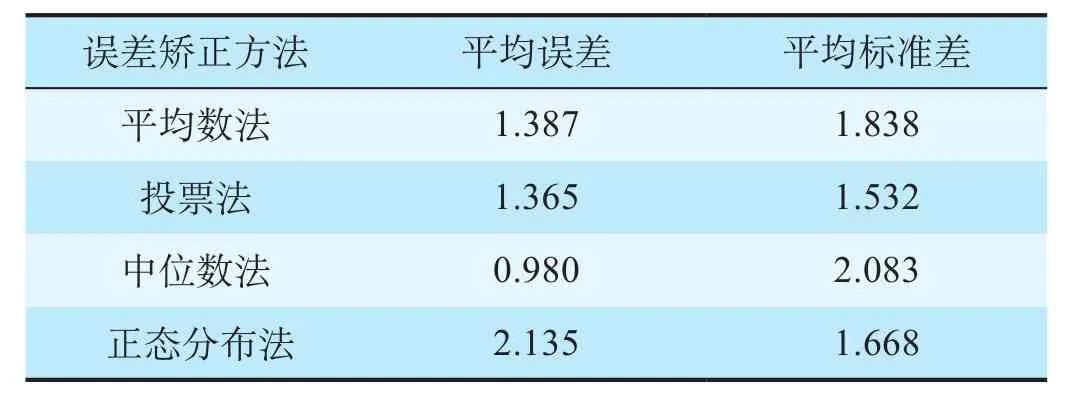
表2 3組實驗取平均結果 mmTab.2 Average of 3 groups of experiments
5 結束語
基于激光雷達技術的車輛輔助引導系統能夠為司機實時提供汽車相對平車邊界的位置,在一定程度上可以增強鐵路汽車裝載的靈活性,保證裝載過程中的人員與設備安全,有效提升鐵路汽車運輸服務質量,提高裝車效率。通過實驗證明,采用車輛輔助引導系統和激光雷達檢測算法后,車輛引導的可靠性、精確度得以提高,不僅滿足了汽車在鐵路裝載中的定位引導需求,有效節省時間,還節約了人力,減少安全隱患。隨著無人駕駛和室外機器人的飛速發展,激光雷達技術也越來越成熟,在滿足技術標準的前提下應進一步研究降低激光雷達成本,增強產品競爭力。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
汽車與安全(2019年9期)2019-11-22 09:48:03
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
決策探索(2014年21期)2014-11-25 12:29:50