基于矯正廣義走廊的電動傾轉旋翼機模態轉換
2018-08-29 05:38:50魯麟宏付榮王勇曾建平
航空學報 2018年8期
關鍵詞:模態
魯麟宏,付榮,王勇,曾建平,*
1. 廈門大學 航空航天學院,廈門 361005 2. 北京航空航天大學 無人機系統研究院,北京 100083
傾轉旋翼機兼備直升機和固定翼飛機優點,在軍事和民用方面均有廣泛應用前景[1-6]。模態轉換控制是該類飛行器的關鍵技術與挑戰之一[7-8],通過模態轉換可實現飛行器在低速垂直起降模態和高速巡航模態之間相互轉換。模態轉換時,旋翼-機翼的氣動干擾和旋翼傾轉過程中的非線性及非定常氣動因素,使得傳統直升機或固定翼的飛行力學分析方法可能失效[9],模態轉換控制難度較大。
目前,已有的模態轉換控制方法可分為非線性控制方法和經典控制方法兩類。王奇等提出的非線性自適應切換混合控制方法[10],陳仁良等提出的動態傾轉操縱策略優化方法[11],夏青元等設計的無模型自適應控制器[12]和Rysdyk 等基于自適應模型逆技術的模態轉換控制[13],楊軍等通過線性分式變換并最小化閉環系統奇異值獲得的魯棒控制器[14], Yang 等基于模態轉換階段非線性模型和非線性最優化方法設計的控制律[15],孫振等提出的有限時間切換控制律[16], Fu 等基于非線性變參數模型和SOS(Sum of Squares) 凸優化技術設計的非線性控制器[17], Lozano 等基于反步法設計的模態轉換控制器[18]等非線性控制方法,有效性已得到仿真驗證,但還缺乏實際飛行測試和評估的報道[19]。經典控制方法如 PID 控制[20-22]和增益調度控制[23-25],仍然是當前工程應用中,模態轉換過程控制的主要方法[19]。然而,增益調度控制在傾轉旋翼機模態轉換中還存在不足,如缺乏對模態轉換過程動態時變因素的有效處理及控制器設計工作量較大等問題。
傳統增益調度直接通過配平系統得到一系列平衡工作點,并分別在這些工作點處線性化,從而將對原非線性系統的跟蹤控制問題轉換為對各線性化模型的鎮定控制問題[26]。模態轉換可視為對過渡走廊的跟蹤問題,即對系統部分狀態量的跟蹤。為實現部分狀態量跟蹤時變過渡走廊,客觀上要求系統的狀態變化率不能為零(如加速度和俯仰角速度)。另一方面,當把系統鎮定到平衡工作點時,系統所受合力及合力矩為零,將保持當前工作點運動狀態不變。因此,模態轉換時系統各狀態量不能沿配平軌跡運動,這與將系統鎮定到各配平工作點的目的相矛盾。當需在較短時間內完成模態轉換過程時,系統實際運行狀態可能與配平工作點產生較大偏離,甚至逃離配平工作點的小鄰域穩定范圍,致使所設計控制器性能較差甚至可能無法保證系統的穩定性[27]。另外,當系統維數較高和選取工作點數較多時,通過增益調度方法設計控制器存在較大的工作量。
針對傳統增益調度方法的上述問題,本文以基于轉速控制的電動傾轉旋翼機為對象,研究其模態轉換控制算法。首先利用模態轉換時過渡走廊及其導數信息,提出兩步法配平,對原配平工作點進行矯正,并通過擬合獲得矯正廣義走廊。然后基于矯正廣義走廊,進一步設計了在線增益調度算法。最后以某小型傾轉旋翼無人機為算例進行仿真,驗證在線增益調度算法的有效性和矯正廣義走廊的優越性。本文對電動傾轉旋翼機模態轉換控制算法的研究成果,可為常規傾轉旋翼機模態轉換控制算法設計提供借鑒。
1 問題描述
在地面坐標系下,傾轉旋翼機模態轉換階段的縱向動力學方程為[28]
(1)
式中:Vx和Vy分別為水平和垂直速度;H為高度;θ為俯仰角;q為俯仰角速度;m為飛行器質量;Iz為俯仰轉動慣量;Mz為俯仰力矩;Ff和Fg分別為飛行器所受合力在機體軸系里沿坐標軸分解得到的前向力和重向力。
常規傾轉旋翼機,如美國的XV-15和魚鷹V-22,通常在旋翼下方安裝有自動傾斜器,在模態轉換過程中,控制量存在槳距、油門及氣動舵面的綜合控制。而本文研究的電動傾轉旋翼機采用電機控制旋翼轉速且沒有自動傾斜器裝置,因而控制量僅為旋翼轉速/油門和氣動舵面。
設電動傾轉旋翼機短艙傾角為τ,升降舵偏轉角δz和油門中值δp為控制量。當短艙傾轉時,飛行器力學特性 (Ff,Fg,Mz) 與 (Vx,Vy,H,θ,q,δz,δp,τ) 具有復雜的非線性函數關系。將式(1)寫成狀態方程:

(2)

模態轉換時,電動傾轉旋翼機短艙傾角的傾轉模式需預先確定,記短艙傾轉律為r(t),t∈[t0,tend],t0和tend分別為模態轉換的開始和結束時刻,r(t) 為單調的連續函數,則t時刻對應的短艙傾轉角τ=r(t)。對于不同的傾轉旋翼機,可根據其結構特點和短艙傾轉電機性能設計合適的傾轉律,有利于平穩安全地完成模態轉換。

定義1電動傾轉旋翼機過渡走廊 (Conversion Corridor) 為
(3)
傾轉旋翼機模態轉換時,過渡走廊存在安全區域,即短艙傾角所對應的期望飛行速度和高度需控制在相應的安全合適范圍內,以保證其能夠根據所設計的傾轉律和期望飛行速度及高度,安全完成模態轉換。另外,可結合仿真和實際飛行實驗,優選過渡走廊,以降低模態轉換控制難度,提高安全性和平穩性。
本文考慮如下模態轉換控制問題:
問題1根據短艙傾轉律r(t) 和過渡走廊Scc(τ),對系統式(2)設計狀態反饋控制器,使電動傾轉旋翼機飛行速度和高度跟蹤Scc(τ)。
問題 1 為對系統式(2)部分狀態量的跟蹤問題,不便于直接基于增益調度方法進行狀態反饋控制器設計。因此,需要把問題 1 轉化為對系統全部狀態量的跟蹤問題。通常做法為根據傾轉律r(t) 及過渡走廊Scc(τ),對系統式(2)進行配平,得到一系列與短艙傾角一一對應的工作點 (ξ*(τ),η*(τ)),然后擬合即可得到全部狀態量的跟蹤軌跡和參考控制輸入。
記配平狀態為
ξ*(τ)=
配平輸入為
則有如下定義:
定義2稱電動傾轉旋翼機廣義走廊 (Gene-ralized Corridor) 為
其廣義走廊對應的參考控制輸入 (Nominal Control Input) 記為
ηgc(τ):=η*(τ)τ0≤τ≤τend
則電動傾轉旋翼機的模態轉換控制問題轉化為如下狀態跟蹤問題:
問題2根據傾轉律r(t)、廣義走廊Sgc(τ) 和對應參考控制輸入ηgc(τ),對系統式(2)設計狀態反饋控制器,使電動傾轉旋翼機狀態ξ跟蹤Sgc(τ)。
問題 2 即為對系統全部狀態量的跟蹤問題,通過在各配平工作點線性化系統式(2)并設計狀態反饋鎮定控制器,根據短艙傾角實時調度控制增益,使系統式(2)沿各工作點運行,即可控制電動傾轉旋翼機按給定傾轉律和過渡走廊完成模態轉換。由問題 1 可知,為實現電動傾轉旋翼機飛行速度和高度跟蹤時變過渡走廊,要求系統式(2)部分狀態量變化率不為零。而基于增益調度方法,原問題被轉化為各配平工作點的鎮定問題,這意味著飛行器所受合力及合力矩處于配平狀態,系統將停在某一工作點“不動”。故模態轉換時系統不可實時運行在各配平工作點,為解決這一矛盾,本文利用已知的過渡走廊及其導數信息,提出一種兩步法配平策略,對配平工作點進行矯正,并擬合獲得矯正廣義走廊和參考控制輸入。
2 電動傾轉旋翼機模態轉換控制
2.1 魯棒增益調度控制
記狀態跟蹤誤差x=ξ-Sgc(τ),控制增量u=η-ηgc(τ),則偏差系統為
ηgc(τ),τ)
(4)
這樣,問題 2 可轉化為對偏差系統式(4)的鎮定問題。系統式(4)是非線性變參數系統,可采用增益調度方法進行控制器設計。給定短艙傾轉角τ,對系統式(4)在原點 (xe,ue) 線性化得
(5)
式中:(Aτ,Bτ) 為雅克比矩陣;(ΔAτ,ΔBτ) 為線性化舍棄的高階項。
在配平點鄰域內,假定 (ΔAτ,ΔBτ) 范數有界,且可表示為
式中:H、FA和FB為已知適維矩陣,反映模型誤差的結構信息;Σ為適維不確定矩陣,不失一般性可假設其滿足ΣΤΣ≤I。
給定一系列短艙傾角τ,分別設計魯棒鎮定器控制Kτ。以短艙傾角τ為調度參數實時切換Kτ,即可得到電動傾轉旋翼機模態轉換階段的控制器。進一步,對某一短艙傾轉角τ對應的線性不確定系統式(5),易知式(5)的一個魯棒鎮定控制器可由如下線性矩陣不等式求解[29]:
<0
(6)
式中:ε為待求標量,滿足ε>0;X為適維對稱正定矩陣;W為普通適維矩陣。若線性矩陣不等式(6) 有解,則所求控制器為Kτ=WX-1。
2.2 矯正廣義走廊
問題 1 轉化為問題 2 時,廣義走廊和參考控制輸入可通過配平方法得到。記待配平系統動態為L,系統階數為n,控制輸入個數為m,配平時系統狀態和控制輸入的配平參考值分別記為
(7)
且記列向量
(8)

L(ξ*,η*)=0
(9)
由配平方程式(9)所得配平結果滿足:
(10)
傳統配平方法直接把待配平系統動態取作被控系統來獲得配平工作點。取待配平系統L為電動傾轉旋翼機縱向動力學方程式(2),給定某一傾轉角τ,并要求飛行器的飛行速度和高度與過渡走廊相等,而俯仰角、俯仰角速度以及控制輸入為滿足配平方程的可行值。此時
(11)
求解配平方程式(9)即可得到ξ*(τ)、η*(τ),并記廣義走廊Sgc(τ)=ξ*(τ),參考控制輸入ηgc(τ)=η*(τ),由于
L=f(ξ,η,τ)
(12)
則有
f(Sgc(τ),ηgc(τ),τ)≡0
(13)
記電動傾轉旋翼機完成模態轉換過程中各狀態量實際的變化率為υ(t),則有
f(ξ,η,τ)=υ(t)≠0
(14)

(15)
階段a根據過渡走廊動態,取
(16)
為階段a對υ(t) 的估計,待配平系統取為
(17)
給定某一傾轉角τ,并要求飛行器的飛行速度和高度與過渡走廊相等,而俯仰角、俯仰角速率以及控制輸入為滿足配平方程的可行值。此時
(18)
(19)
階段a配平所得廣義走廊和參考輸入蘊含過渡走廊的動態信息,進而基于增益調度方法設計控制器時,所用工作點 (ξ*(τ),η*(τ))得到一定程度矯正,不再使得系統處于平衡狀態,但階段a工作點的矯正過程未考慮俯仰角及俯仰角速度的變化率信息,故在階段a后增加階段b。
階段b基于階段a配平結果,擬合各工作點俯仰角的配平值即可得到俯仰角參考軌跡,對其求一階和二階導數作為階段b矯正過程的系統動態信息,即令
(20)
為階段b對υ(t)的估計,其中θa(τ)為階段a配平擬合得到的俯仰角參考軌跡,待配平系統取為
(21)
給定某一傾轉角τ,并要求飛行器的飛行速度和高度與過渡走廊相等,同時要求俯仰角與階段a配平結果θa(τ)相等,而俯仰角速率以及控制輸入為滿足配平方程的可行值。此時
(22)
(23)
(24)
注記1在不考慮外擾和參數攝動的理想條件下,矯正后的廣義走廊和參考控制輸入更接近電動傾轉旋翼機進行模態轉換時的狀態運動軌跡和控制輸入,跟蹤矯正后的廣義走廊更為合理;當在工作點通過線性化方法簡化原系統模型時,基于矯正后的工作點可提高線性化模型相對于原系統的近似程度,有利于提高控制器的穩定性和跟蹤性能。
注記2傾轉旋翼機模態轉換是一個動態時變的運動過程,理論上,矯正配平時需考慮系統全部狀態量配平值的動態信息。不幸的是,模態轉換時其強非線性、強時變、強耦合氣動力學特性,使得各狀態量配平值動態信息難以精確計算。故提出兩步法配平策略,首先利用過渡走廊計算出水平、垂直速度及高度配平值動態信息,并在階段a使用,以矯正俯仰角配平值并估計俯仰角配平值和俯仰角速度配平值的動態信息;然后在階段b對俯仰角速度配平值和參考控制輸入進行矯正。
2.3 在線增益調度算法
傳統增益調度方法在控制器設計時往往伴隨較大工作量:全局控制器擬合隨系統維數和選取工作點數的增加而變得繁瑣;同時一旦對調度方案進行調整,就需要重新求解和擬合控制器,靈活性較差。增益調度的目的是根據調度參數來實時調整當前控制增益,以實現控制目標。考慮以線性矩陣不等式(6)作為求解各工作點控制器的通用條件,根據調度參數實時在線計算當前系統所需的控制增益,即可實現在線調整控制增益。算法流程如圖1所示。
注記3求解問題2,也可在線性變參數(Linear Parameter Varying,LPV)框架下處理模型并進行控制器設計[30]。當基于增益調度求解問題2時,單點控制器的設計可考慮外擾作用下的H∞問題[31]。基于在線算法實時切換控制增益可能引起控制量跳變,工程上一般會采取平滑過渡的方式來處理[32]。
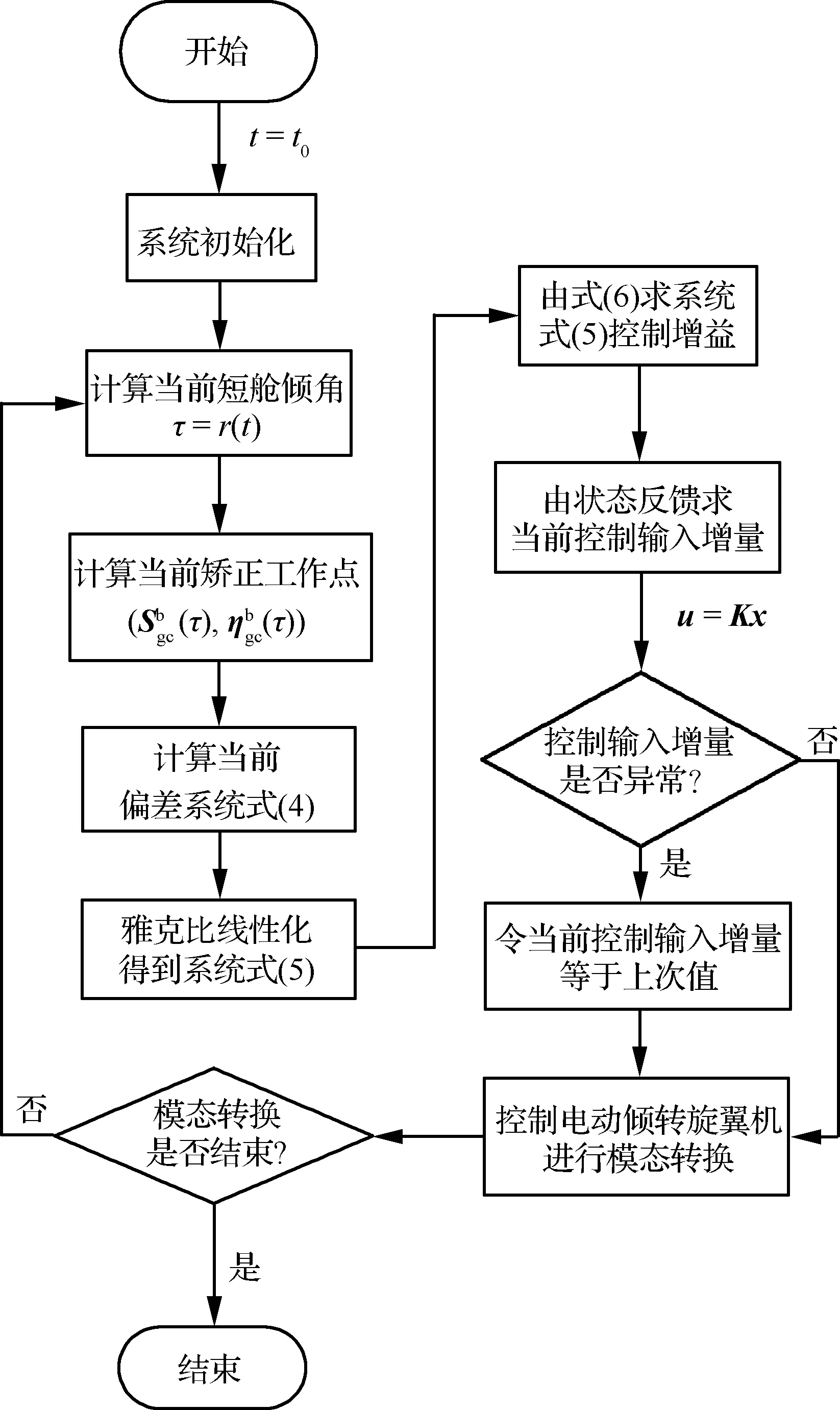
圖1 在線增益調度算法流程Fig.1 Flowchart of online gain-scheduling algorithm
3 某傾轉旋翼無人機仿真實驗
以某傾轉旋翼無人機[28](Unmanned Aerial Vehicle, UAV) 為算例進行仿真,驗證本文控制方法的有效性。如圖2 所示,Otxtytzt為飛行器的機體軸系坐標系,xt沿機頭方向,yt沿機體縱軸方向并與xt垂直,該飛行器通過在固定翼飛機機翼內側安裝可傾轉的柵板和旋翼,并通過柵板的傾轉來改變旋翼的短艙傾角,從而改變其飛行模態。
在模態轉換階段,飛行器所受力由3部分構成,分別是機體氣動力與重力FJ、旋翼拉力FX以及柵板氣動力FS,對應的力矩分別為MJ、MX、MS。在機體軸系下進行力和力矩分解,求得縱向動力學方程式(1)的前向力、重向力和俯仰力矩為
(25)
式中:FJ沿機體軸系的分力FxtJ和FytJ及對應的力矩MzJ分別為
(26)
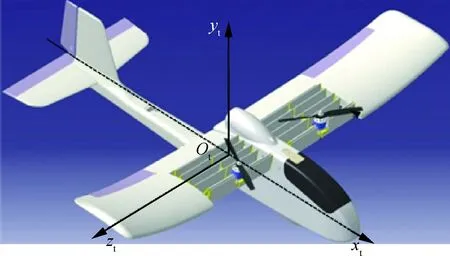
圖2 無人傾轉旋翼機機體軸Fig.2 Body axis of tilt rotor UAV
式中:g為重力加速度;ρ為給定高度的大氣密度;S為機翼面積;Cm為機體俯仰力矩系數;bA為平均氣動弦長。記CD、CL分別為機體對應的阻力系數和升力系數,則機體阻力Q和機體升力L為
(27)
旋翼拉力FX沿機體軸系的分力FxtX和FytX及對的應力矩MzX分別為
(28)
式中:T=14.75δp-0.819,T為一側旋翼產生的拉力;yT為旋翼拉力作用點相對重心的垂向位置。
柵板氣動力和力矩計算與機體氣動力和力矩相似,限于篇幅不再列出。式(25)~式(28)中,傾轉旋翼無人機基本參數如表1 所示。
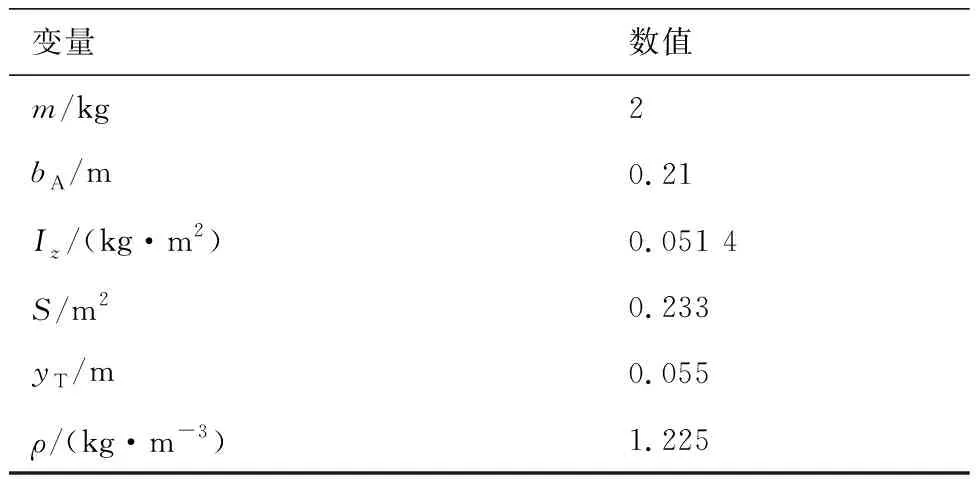
表1 某傾轉旋翼無人機基本參數Table 1 Basic parameters of a tilt rotor UAV
基于矯正前廣義走廊及參考控制輸入,分別采用傳統和在線增益調度方法求解問題 2。其中,按τ={0°,5°,10°,15°,20°,25°,30°,35°,40°,45°,50°,55°,60°,65°,70°,75°,76°}這17個工作點設計控制器擬合得到傳統增益調度的模態轉換控制器,仿真如圖5 所示。
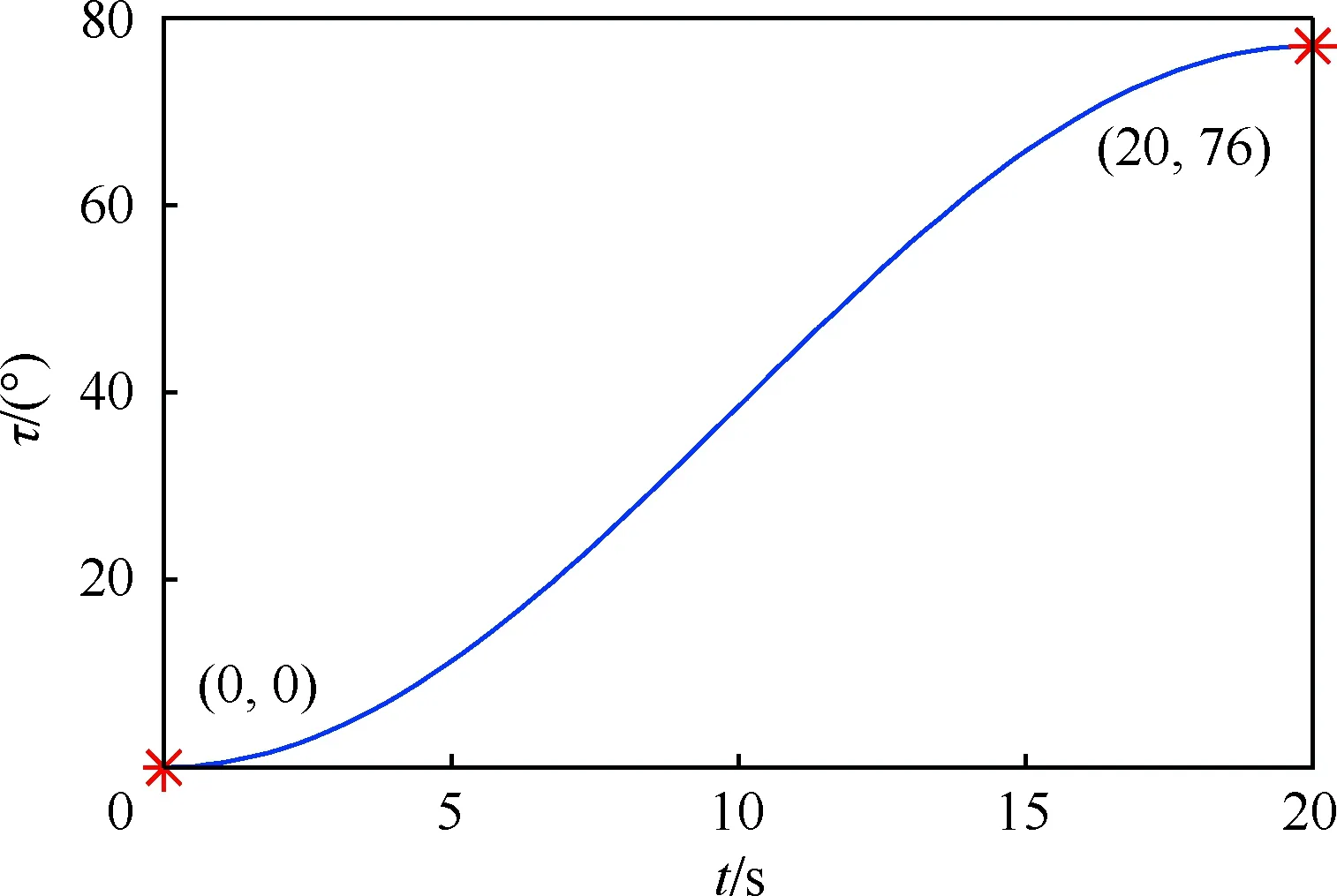
圖3 某傾轉旋翼無人機傾轉律Fig.3 Tilting law of a tilt rotor UAV
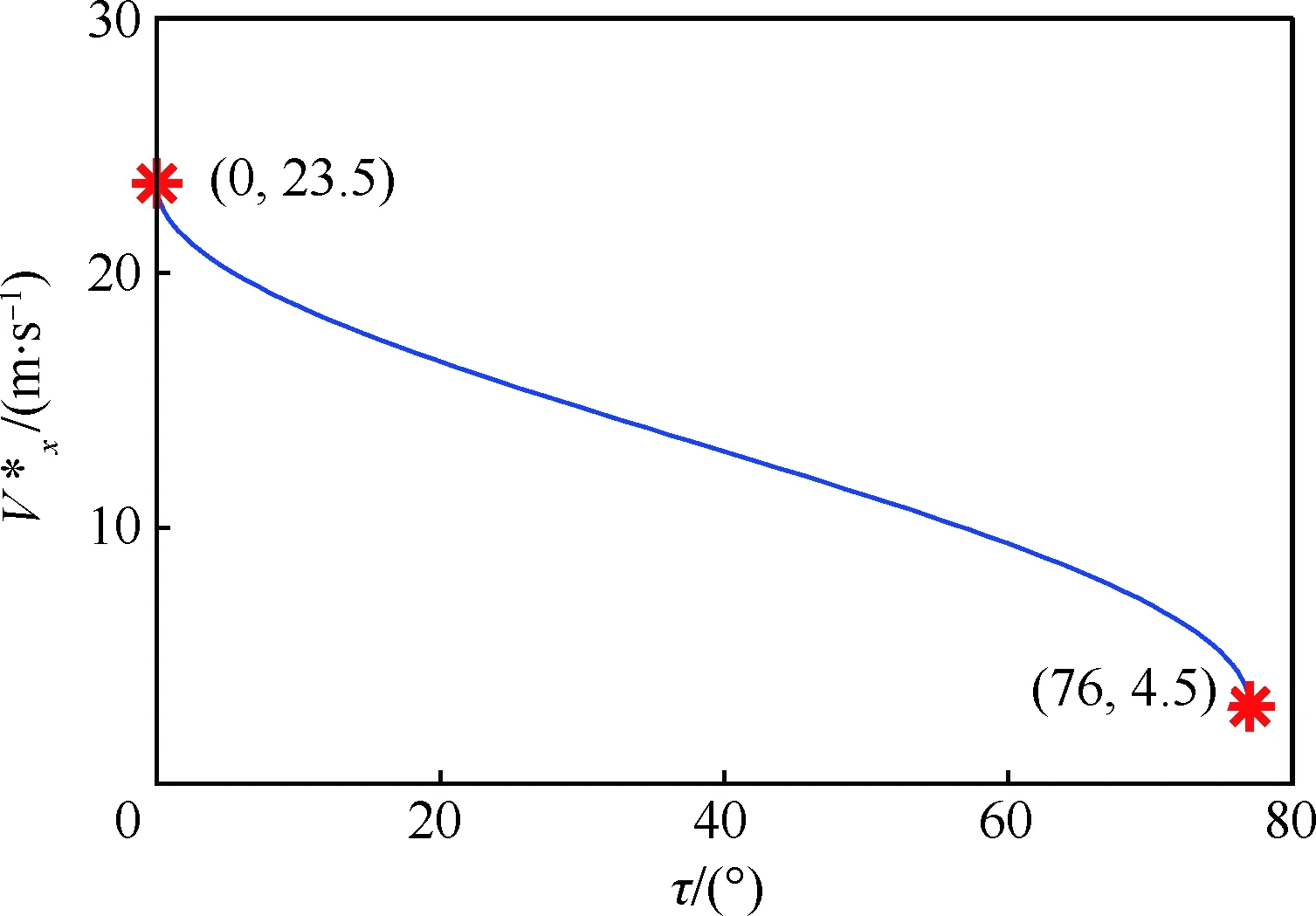
圖4 水平速度參考軌跡Fig.4 Reference trajectory of horizontal velocity
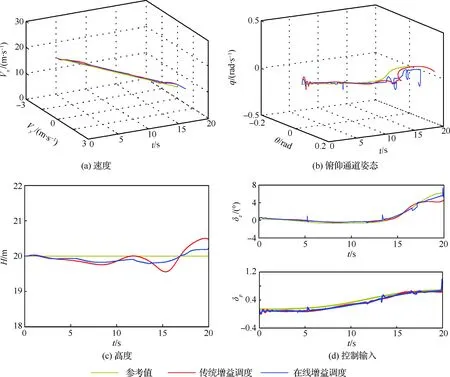
圖5 傳統與在線增益調度對比Fig.5 Traditional vs online gain-scheduling
由圖5可知,在線增益調度方法能夠控制傾轉旋翼無人機以較小誤差跟蹤速度和高度給定值,成功完成模態轉換,即在線算法具有可行性。進一步,基于在線增益調度方法,對比廣義走廊矯正前和矯正后的控制效果,仿真如圖6所示。
由圖6可知,基于矯正后的廣義走廊,傾轉旋翼無人機模態轉換時,過渡走廊的跟蹤誤差得到有效減小。進一步,縮短模態轉換時間,對比矯正前和矯正后廣義走廊對控制效果的影響。記 ΔVxmax、ΔVymax、ΔHmax分別為水平速度,豎直速度及高度的最大跟蹤誤差,定義誤差因子ρe為
(29)
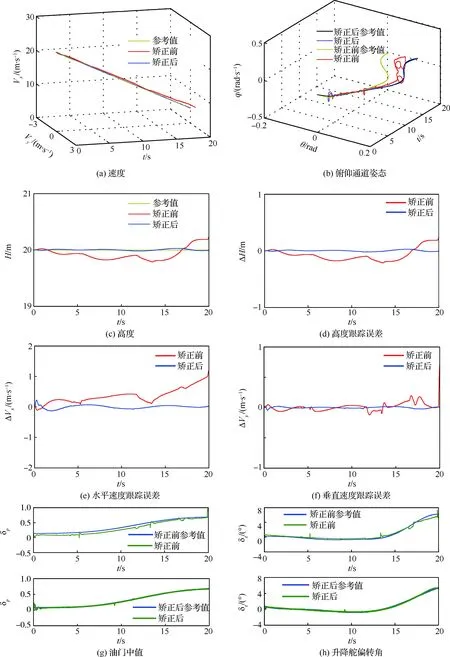
圖6 矯正前與矯正后廣義走廊對比Fig.6 Comparison of uncorrected generalized corridor and corrected generalized corridor
ρe反映了廣義走廊矯正后相比于矯正前對過渡走廊平均跟蹤誤差的改善程度,仿真數據如表2所示。由表2可知,在相同模態轉換時間下(20 s和 15 s),雖然基于矯正前后的廣義走廊均可完成模態轉換,但誤差因子約為12%,說明矯正后廣義走廊將對過渡走廊的最大平均跟蹤誤差減小80%以上;當把模態轉換時間由20 s縮短一半至10 s時,基于矯正后廣義走廊進行模態轉換與矯正前20 s相比,過渡走廊的最大跟蹤誤差仍小于后者;當模態轉換時間縮短至10 s及 5 s時,基于矯正前廣義走廊的模態轉換失敗,而基于矯正后廣義走廊的模態轉換均能順利完成。
最后,基于在線增益調度算法和矯正后廣義走廊,對該傾轉旋翼無人機氣動力系數CD、CL及力矩系數Cm引入負10%攝動進行仿真,模態轉換時間為20 s,結果如圖7 所示。
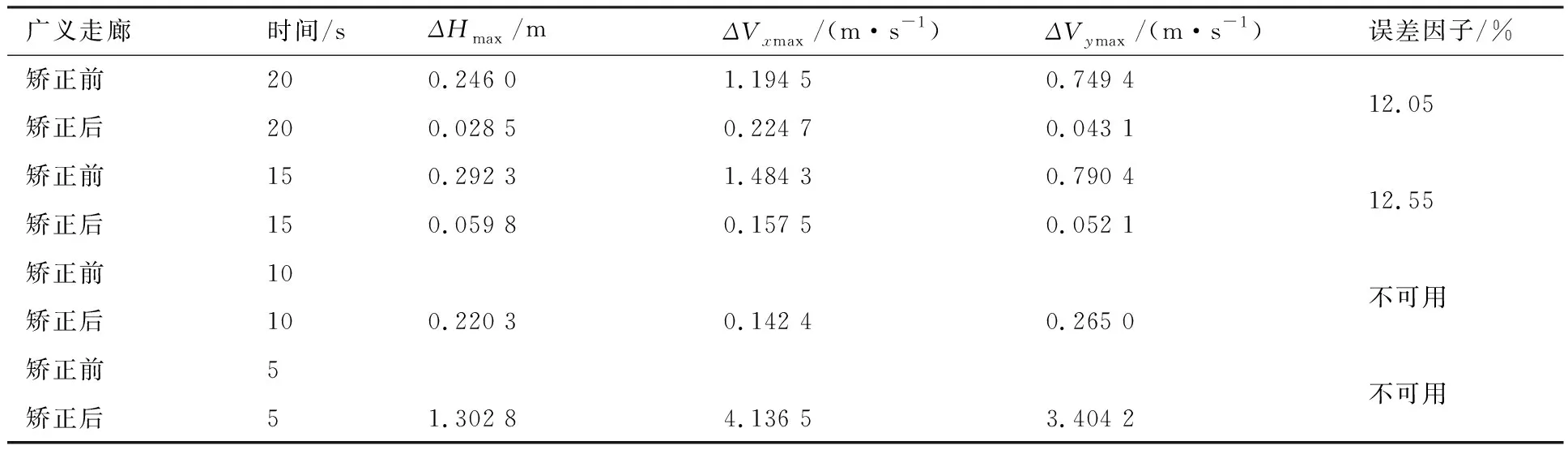
表2 廣義走廊矯正前后仿真數據對比
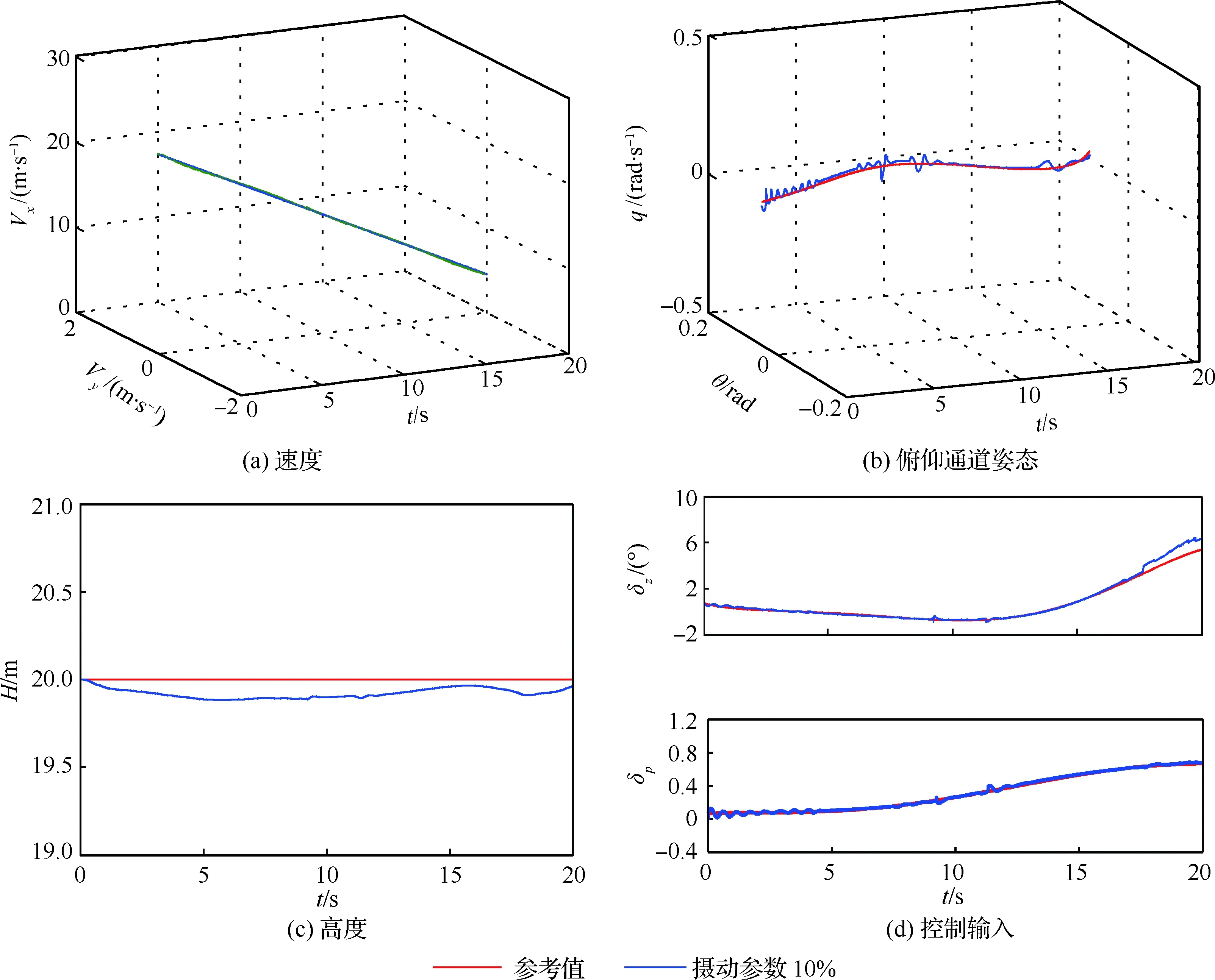
圖7 參數攝動模態轉換Fig.7 Mode conversion with parameter perturbation
由圖7可知,當發生 10% 參數攝動時,傾轉旋翼無人機仍能跟蹤過渡走廊,順利完成模態轉換,表明控制器具有良好的魯棒性能。
綜上所述,本文的在線增益調度算法能夠實現對過渡走廊的跟蹤控制,矯正后的廣義走廊可顯著減小對過渡走廊的跟蹤誤差且能夠縮短模態轉換時間。
4 結 論
1) 針對電動傾轉旋翼機的模態轉換控制問題,考慮了模態轉換過程中過渡走廊的時變特征,設計兩步法配平策略對原配平工作點進行矯正,減小了系統實際工作點相對于配平工作點的偏離程度,從而降低了線性化方法所帶來的保守性,有利于提高增益調度控制器的穩定性。當基于未矯正工作點把跟蹤問題轉化為鎮定問題時,未考慮被跟蹤軌跡所蘊含的時變動態特征,所設計控制器只能解決較慢變的跟蹤問題;反之,基于矯正后的工作點,可在一定程度上提高控制器的穩定性,且使其在跟蹤相對快變的指令時仍然有效。
2) 基于矯正后廣義走廊控制電動傾轉旋翼機模態轉換,可有效減小對過渡走廊的跟蹤誤差。當需要在較短的時間內快速完成模態轉換時,基于矯正后的廣義走廊更具優勢,能夠在較小的跟蹤誤差條件下,快速完成模態轉換。
在線增益調度算法存在輕微抖振問題,下一步將圍繞在線增益調度算法的抖振抑制和控制增益在線優化等問題展開研究,期望得到可靠性高且易于工程應用的電動傾轉旋翼機模態轉換控制方法。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36